Область техники
Настоящее изобретение касается системы мониторинга анемобароклинометрических параметров в летательном аппарате. Эта система позволяет определять на борту летательного аппарата анемобароклинометрические параметры, связанные с полетом летательного аппарата. Анемобароклинометрические параметры являются параметрами, связанными с положением и скоростью летательного аппарата по отношению к окружающему воздуху.
Изобретение находит свое применение в области авиации и, в частности, в области измерения параметров, связанных с анемоклинометрией летательных аппаратов.
Уровень техники
На борту летательного аппарата очень важно знать некоторые данные, связанные с полетом летательного аппарата. Технологии анемометрических измерений позволяют получить эти данные, в частности скорость летательного аппарата, его положение в пространстве по отношению к воздуху, его высоту, а также непосредственные параметры воздуха. Эти данные называются анемобароклинометрическими параметрами. Среди этих анемобароклинометрических параметров есть параметры, относящиеся к воздуху, окружающему летательный аппарат, такие как статическое давление, динамическое давление или общая температура. Есть также параметры, связанные с положением летательного аппарата в этом окружающем пространстве, такие как скорость летательного аппарата, его угол атаки или его угол бокового скольжения. Угол атаки является относительным углом между направлением воздушного потока и горизонтальной траекторией летательного аппарата. Угол бокового скольжения летательного аппарата является углом воздушного потока по отношению к траектории летательного аппарата.
На основании значений некоторых из этих параметров можно определить значения некоторых других из этих параметров. Так, чтобы определить значения всех необходимых анемобароклинометрических параметров на борту летательного аппарата, измеряют некоторые из этих анемобароклинометрических параметров, чтобы на их основании вывести другие параметры.
В настоящее время параметры на борту летательного аппарата измеряют при помощи различных датчиков, установленных снаружи летательного аппарата на внешней обшивке летательного аппарата.
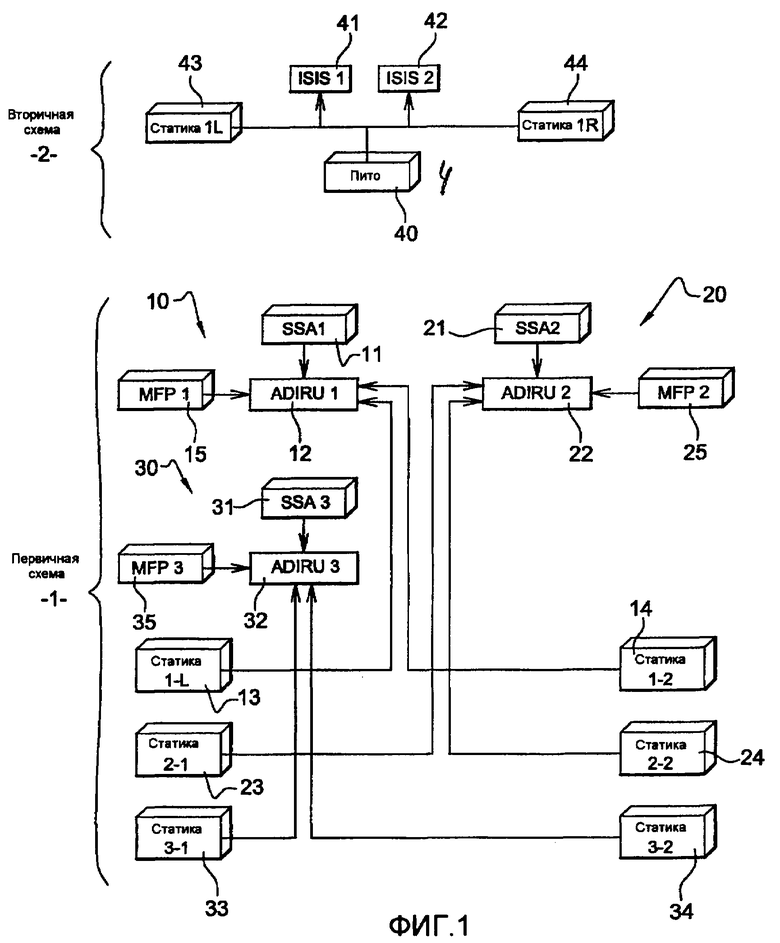
Классическая система определения анемобароклинометрических параметров в летательном аппарате показана на Фиг. 1. Эта система содержит первичную схему 1 детектирования и вторичную схему 2 детектирования, называемую также аварийной схемой, используемой в случае неисправности первичной схемы или в случае возникновения проблем в измерении, обнаруженных в первичной схеме 1.
Первичная схема 1 содержит несколько каналов измерения. Как правило, первичная схема содержит три по существу идентичных канала 10, 20, 30 измерения. Все эти три канала 10, 20, 30 измерения обеспечивают измерение одних и тех же параметров. Наличие нескольких каналов измерения в одной схеме должно обеспечить избыточность измерений для повышения безопасности полета летательного аппарата. Таким образом, убеждаются, что полученное измерение является правильным.
Классически каждый канал 10, 20, 30 измерения первичной схемы 1 содержит:
- один или несколько датчиков детектирования статического давления 13-14, 23-24 или 33-34,
- датчик детектирования динамического давления или общего давления,
- датчик измерения общей температуры и
- датчик измерения угла атаки летательного аппарата.
В некоторых летательных аппаратах несколько датчиков объединены в одном и том же датчике, который выдает несколько значений параметров. В случае, показанном на фиг. 1, многофункциональный датчик MFP 15, 25, 35 обеспечивает измерение динамического давления, общей температуры и угла атаки.
На борту некоторых летательных аппаратов, как в примере, показанном на Фиг. 1, используют датчик SSA (side-slip angle в англо-саксонской терминологии) 11, 21, 31 для измерения угла бокового скольжения летательного аппарата.
Для каждого канала измерения данные, измеренные различными датчиками, передаются в устройство обработки данных ADIRU 12, 22, 32. Это устройство обработки данных 12, 22, 32 обеспечивает обработку измерений, произведенных датчиками, и определение значений других не измеренных параметров. Например, оно обеспечивает определение скорректированной скорости (computed air speed в англо-саксонской терминологии), истинной скорости летательного аппарата (true airspeed в англо-саксонской терминологии) и числа Маха летательного аппарата.
Как было указано выше, классические системы мониторинга имеют первый уровень безопасности, полученный за счет избыточности измерений в первичной схеме 1. Как правило, классические системы мониторинга имеют второй уровень безопасности, обеспечиваемый вторичной схемой 2. Классически эта вторичная схема 2 содержит один или несколько датчиков статического давления 43, 44 и трубку Пито 40, которая обеспечивает детектирование динамического давления воздуха. Эта вторичная схема 2 содержит одно или несколько устройств обработки данных 41, 42, которые обеспечивают обработку измеренных значений, чтобы вывести из них значения не измеренных анемобароклинометрических параметров.
Таким образом, в случае сбоя в работе первичной схемы 1 минимальную информацию, необходимую для обеспечения безопасности полета летательного аппарата, выдает вторичная схема 2.
Как было указано выше, в классических системах мониторинга анемобароклинометрических параметров безопасность полета обеспечивается избыточностью каналов измерения в первичной сети и наличием вторичной сети. Иначе говоря, безопасность обеспечивают при помощи схем детектирования, объединяющих механику и электронику. Таким образом, первичная и вторичная схемы детектирования являются схемами одного типа, механического и электронного. Следовательно, если какое-либо явление приводит к сбою в работе элемента системы, например датчика статического давления, то это отражается на всех аналогичных элементах системы, то есть на всех датчиках статического давления. В этом случае во всей системе не остается никакого средства для получения информации о статическом давлении воздуха.
Кроме того, различные датчики, используемые в классических системах, установлены на внешней обшивке летательного аппарата, выступая над этой обшивкой. В частности, трубка Пито является трубкой, которая выступает снизу летательного аппарата и расположена в направлении движения летательного аппарата. Датчик статического давления требует наличия отверстия в стенке фюзеляжа перпендикулярно направлению движения летательного аппарата. Датчики измерения угла атаки и угла бокового скольжения содержат, каждый, подвижную лопасть, установленную на оси вращения и чувствительную к изменению воздушного потока относительно летательного аппарата. Таким образом, эти датчики образуют выступы на внешней обшивке летательного аппарата. Следовательно, они создают лобовое сопротивление движению летательного аппарата. Кроме того, они могут являться источником шума.
Кроме того, эти датчики являются чувствительными к обледенению и к дождю. Чтобы избежать обледенения датчика, его необходимо оборудовать средствами нагрева, что увеличивает объем датчика и, следовательно, размер выступа на внешней обшивке летательного аппарата.
Сущность изобретения
Задачей настоящего изобретения является устранение вышеупомянутых недостатков известных технических решений. Для этого изобретением предлагается система мониторинга анемобароклинометрических параметров, в которой избыточность или дублирование достигается при помощи средств, отличных от механических. Изобретением предлагается добавить схему измерения оптического типа или, по меньшей мере, частично заменить классическую схему детектирования или классический канал измерения такой схемой измерения оптического типа. Эта оптическая схема измерения содержит лазерный анемометр.
Согласно изобретению лазерный анемометр можно добавить к первичной и вторичной схемам, чтобы получить дополнительный элемент безопасности с дополнительными измерениями параметров. Он может также полностью или частично заменить классическую вторичную схему или канал измерения первичной схемы, чтобы получить дополнительный элемент безопасности с использованием новой технологии измерения.
В частности, объектом настоящего изобретения является система мониторинга анемобароклинометрических параметров в летательном аппарате, содержащая первичную схему детектирования, содержащую, по меньшей мере, один канал измерения, при этом упомянутый канал измерения содержит:
- устройство измерения статического давления вокруг летательного аппарата,
- устройство измерения угла бокового скольжения летательного аппарата,
- устройство измерения динамического давления, общей температуры и угла атаки летательного аппарата и
- устройство обработки данных, выполненное с возможностью определения анемобароклинометрических параметров на основании измерений статического давления, угла бокового скольжения, динамического давления, общей температуры и угла атаки,
отличающаяся тем, что содержит, по меньшей мере, один лазерный анемометр для измерения, по меньшей мере, одного параметра истинной скорости летательного аппарата.
Изобретение может содержать один или несколько следующих отличительных признаков:
- лазерный анемометр интегрирован во вторичную схему детектирования;
- система содержит вторичную схему детектирования, содержащую, по меньшей мере, одно устройство измерения статического давления, по меньшей мере, одно устройство измерения динамического давления и, по меньшей мере, одно устройство обработки данных, поступающих от устройств измерения, при этом лазерный анемометр является схемой мониторинга параметров;
- анемометр интегрирован во второй канал измерения первичной схемы детектирования;
- первичная схема содержит третий канал измерения, аналогичный первому каналу измерения;
- первичная схема содержит третий канал измерения, в который интегрирован второй анемометр.
Краткое описание чертежей
Фиг. 1 (уже описана) - функциональная схема классической системы мониторинга анемобароклинометрических параметров.
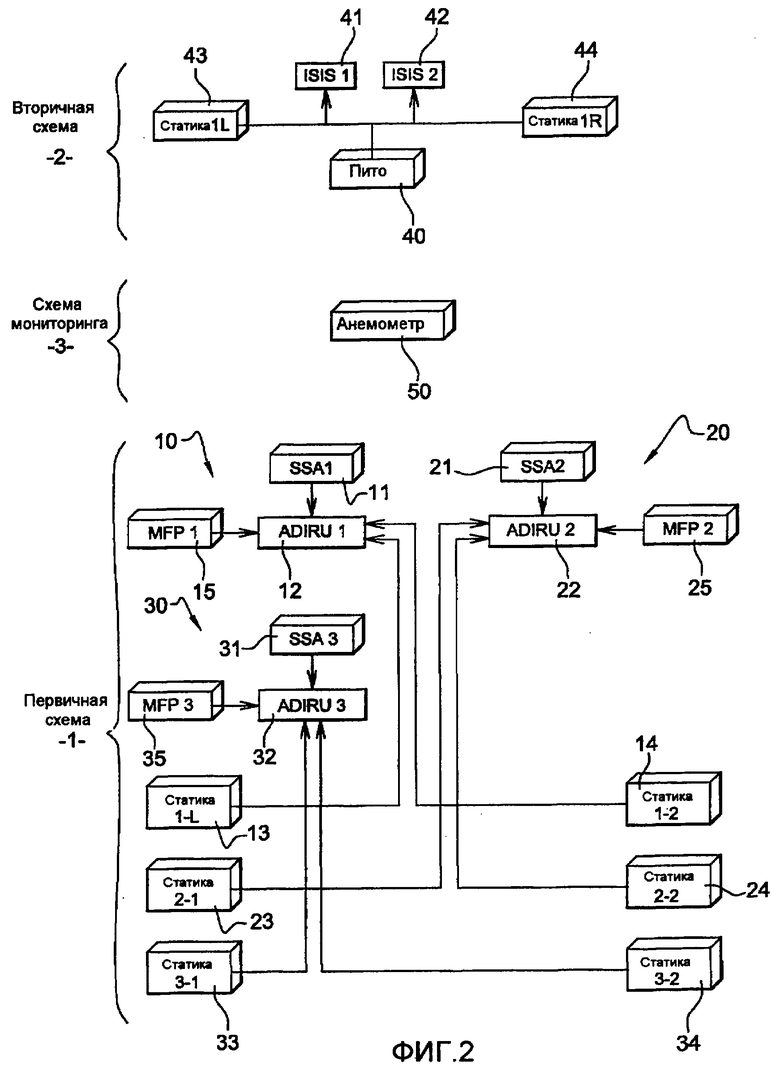
Фиг. 2 - функциональная схема системы мониторинга анемобароклинометрических параметров в случае, когда лазерный анемометр образует третью схему измерения.
Фиг. 3 - функциональная схема системы мониторинга анемобароклинометрических параметров в случае, когда лазерный анемометр образует вторичную схему измерения.
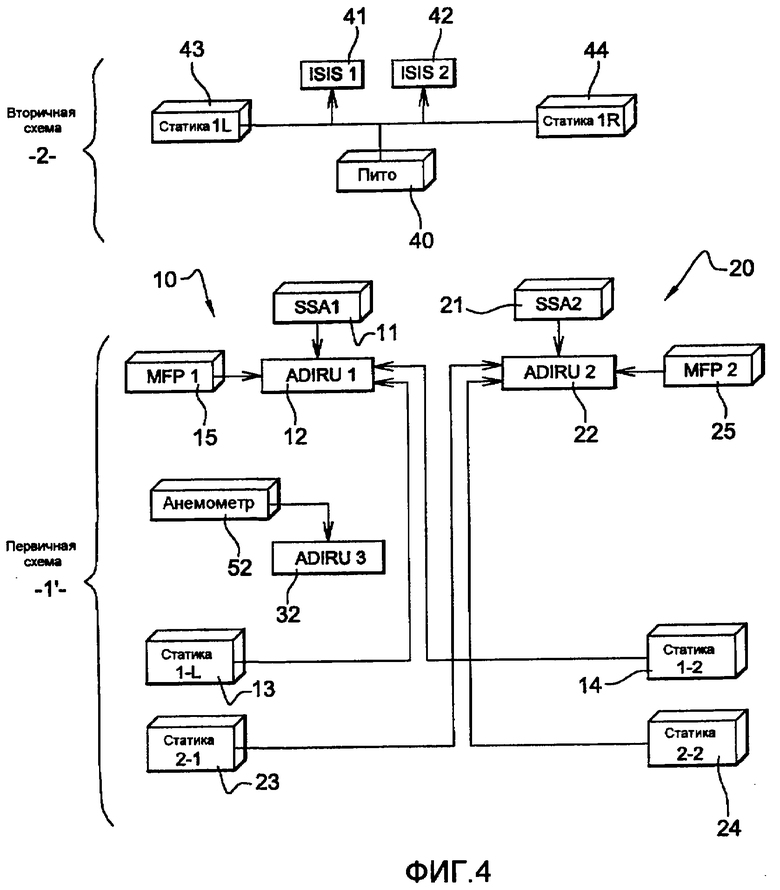
Фиг. 4 - функциональная схема системы мониторинга анемобароклинометрических параметров в случае, когда лазерный анемометр образует канал измерения первичной схемы измерения.
Подробное описание вариантов выполнения изобретения
Система мониторинга анемобароклинометрических параметров в соответствии с настоящим изобретением, кроме классических схем измерения или вместо классической схемы или классического канала измерения, предусматривает использование анемометра лазерного типа, обеспечивающего оптическое измерение некоторых анемобароклинометрических параметров. Действительно, лазерный анемометр позволяет измерять некоторые анемобароклинометрические параметры, в частности скорость летательного аппарата в трех направлениях, то есть его вектор скорости, что позволяет определить угол атаки летательного аппарата и составляющую бокового скольжения летательного аппарата.
Лазерный анемометр осуществляет измерение смещения, которое претерпевает монохроматическая световая волна, в частности лазерная волна, когда она рассеивается при обратном отражении от аэрозолей (частицы или молекулы), присутствующих в атмосфере. Это смещение позволяет определить составляющую вектора скорости вдоль оси излучения. Иначе говоря, лазерный анемометр излучает лазерный луч на заранее определенное расстояние от нескольких метров до нескольких десятков метров за пределы летательного аппарата и принимает лазерный луч после обратного отражения воздухом. Составляющая вектора скорости вдоль оси излучения напрямую связана с изменением длины волны лазерного луча.
Излучая три лазерных луча в трех разных направлениях, лазерный анемометр может определить три составляющих вектора скорости летательного аппарата. Из соображений безопасности и надежности, то есть чтобы убедиться, что измерение, осуществленное при помощи этих трех излучений, является точным, можно осуществить четвертое излучение лазерного луча в четвертом направлении, что позволяет проверить, что оно действительно соответствует результату, полученному при помощи трех предыдущих излучений.
Это измерение составляющих вектора скорости позволяет получить параметр TAS истинной скорости летательного аппарата. Истинная скорость летательного аппарата является скоростью летательного аппарата относительно невозмущенного воздуха. На основании этой истинной скорости лазерный анемометр может вывести параметр угла атаки АОА (angle of attack в англо-саксонской терминологии) летательного аппарата и параметр угла бокового скольжения SSA летательного аппарата. Согласно некоторым технологиям лазерный анемометр может также выдавать измерение следующих параметров:
- общая температура ТАТ, то есть общая температура снаружи летательного аппарата,
- скорректированная скорость CAS, то есть скорректированная скорость летательного аппарата, а также число Маха, то есть скорость летательного аппарата, учитывающая изменения плотности воздуха, что соответствует скорости летательного аппарата относительно скорости звука.
Лазерный анемометр можно установить в гнезде, выполненном вблизи внешней обшивки летательного аппарата и защищенном иллюминатором, обеспечивающим оптическое прохождение лазерного луча. Таким образом, лазерный анемометр можно поместить внутри фюзеляжа, то есть не создавая выступа на внешней обшивке. Следовательно, он позволяет производить измерения без создания лобового сопротивления или шума.
Кроме того, поскольку лазерный анемометр находится в фюзеляже летательного аппарата, он защищен от воздушного потока и, следовательно, на него практически не влияют обледенение и дождь.
Такой лазерный анемометр обеспечивает измерение параметров при помощи оптической технологии, отличающейся от механической технологии классических датчиков первичной и вторичной схем. Это измерение параметров при помощи оптической технологии обеспечивает дополнительный уровень безопасности в дополнение к текущему измерению параметров. Этот дополнительный уровень безопасности можно обеспечить:
- либо добавив дополнительную схему измерения, содержащую, по меньшей мере, один лазерный анемометр,
- либо заменив вторичную схему или один канал первичной схемы лазерным анемометром.
В первом варианте выполнения, показанном на фиг. 2, лазерный анемометр интегрирован в дополнительную схему измерения, обеспечивая измерение анемобароклинометрических параметров в дополнение к измерениям, осуществляемым первичной схемой и вторичной схемой. Эта дополнительная схема измерения называется схемой мониторинга 3. В этом варианте выполнения первичная 1 и вторичная 2 схемы являются идентичными с классическими первичной и вторичной схемами, показанными на Фиг. 1, поэтому их повторное описание опущено.
В варианте выполнения, показанном на Фиг. 2, схема мониторинга 2 содержит, по меньшей мере, один анемометр 50, используемый для осуществления мониторинга параметров, измеренных первичной схемой 1 или вторичной схемой 2 в случае неисправности первичной схемы 1. Измерения, полученные при помощи анемометра 50, можно после этого сравнить с измерениями, полученными при помощи первичной схемы 1, чтобы убедиться, что все полученные параметры находятся в ожидаемом интервале измерений. Таким образом, анемометр 50 обеспечивает дополнительную безопасность по отношению к достоверности измерений.
Во втором варианте выполнения, показанном на фиг. 3, лазерный анемометр интегрирован во вторичную схему вместо классических датчиков. В этом варианте выполнения первичная схема 1 является идентичной с классической первичной схемой, и поэтому ее повторное описание опущено.
В этом втором варианте выполнения вторичная схема 2' содержит, по меньшей мере, один анемометр 51, который обеспечивает измерение анемобароклинометрических параметров вместо статических датчиков 43, 44, и трубки Пито 40 классической вторичной схемы. В зависимости от выбранного анемометра его можно соединить с описанными выше устройствами обработки 41 и 42. Эти устройства обработки 41 и 42 обеспечивают обработку измеренных данных, чтобы на их основании вывести другие анемобароклинометрические параметры; они обеспечивают также связь с бортовым компьютером летательного аппарата. Анемометр может также сам определять неизмеренные анемобароклинометрические параметры.
В варианте выполнения анемометр позволяет образовать аварийную схему 2', используемую в случае неисправности первичной схемы 1. В этом варианте выполнения преимуществом аварийной схемы является использование технологии, отличающейся от первичной схемы и, следовательно, обеспечивающей высокую степень надежности, если все три канала измерения первичной схемы имеют одну и ту же неисправность.
В третьем варианте выполнения настоящего изобретения, показанном на фиг. 4, лазерный анемометр интегрирован в первичную схему 1' вместо канала измерения классической первичной схемы; в этом варианте выполнения вторичная схема 2 является идентичной описанной выше классической вторичной схеме, и ее описание опущено.
В этом третьем варианте выполнения анемометр 52 образует канал измерения первичной схемы 1'. Таким образом, анемометр 52 интегрирован в первичную схему 1' вместо канала измерения 30. В зависимости от выбранного анемометра его можно соединить с устройством обработки 32, которое обеспечивает определение неизмеренных анемобароклинометрических параметров и связь с бортовым компьютером. Анемометр может также сам определять неизмеренные анемобароклинометрические параметры.
В этом варианте выполнения анемометр 52 создает избыточность каналов измерения 10 и 20 первичной схемы 1'. В этом варианте выполнения лазерный анемометр 52 повышает надежность системы за счет избыточности, обеспечиваемой путем использования технологии, отличающейся от двух других каналов измерения 10 и 20 первичной схемы.
В варианте выполнения в каналы измерения 10 или 20 первичной схемы 1' можно встроить второй лазерный анемометр. В этом случае первичная схема содержит классический канал измерения, содержащий датчики, и два канала измерения в соответствии с настоящим изобретением, каждый из которых содержит лазерный анемометр.
Интегрирование, по меньшей мере, одного лазерного анемометра в первичную схему, вторичную схему или в схему мониторинга позволяет измерять истинную скорость летательного аппарата и на основании этой истинной скорости определять все анемобароклинометрические параметры, обычно используемые на борту летательного аппарата, применяя технологию, отличную от механики.
Изобретение относится к измерительной технике и может быть использовано в системах мониторинга анемобароклинометрических параметров в летательном аппарате. Технический результат - повышение надежности. Для достижения данного результата система содержит первичную схему детектирования, которая содержит, по меньшей мере, один канал измерения. При этом упомянутый канал измерения содержит: устройство измерения статического давления воздуха; устройство измерения угла бокового скольжения летательного аппарата; устройство измерения динамического давления, общей температуры и угла атаки летательного аппарата; устройство обработки данных, выполненное с возможностью определения анемобароклинометрических параметров на основании измерений статического давления, угла бокового скольжения, динамического давления, общей температуры и угла атаки; по меньшей мере, один лазерный анемометр (50) для измерения, по меньшей мере, одного параметра истинной скорости летательного аппарата. 5 з.п. ф-лы, 4 ил.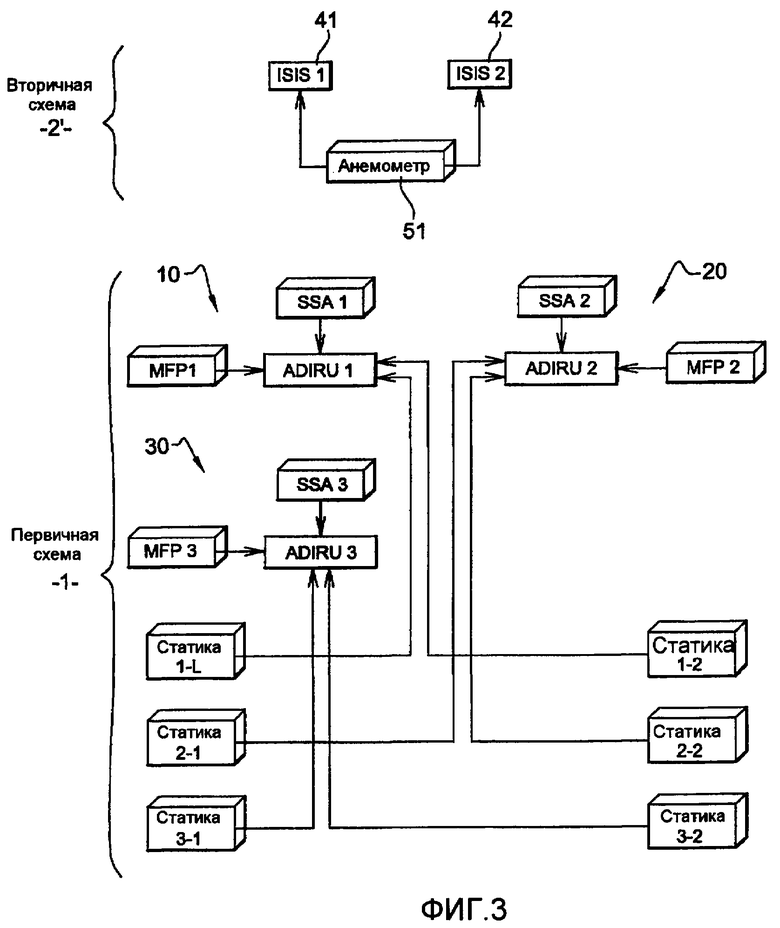
1. Система мониторинга анемобароклинометрических параметров в летательном аппарате, содержащая первичную схему (1) детектирования, содержащую, по меньшей мере, один канал (10) измерения, при этом упомянутый канал измерения содержит:
устройство (13, 14) измерения статического давления воздуха,
устройство измерения угла бокового скольжения летательного аппарата,
устройство (15) измерения динамического давления, общей температуры и угла атаки летательного аппарата, и
устройство (12) обработки данных, выполненное с возможностью определения анемобароклинометрических параметров на основании измерений статического давления, угла бокового скольжения, динамического давления, общей температуры и угла атаки, и вторичную схему детектирования, содержащую, по меньшей мере, один канал измерения,
отличающаяся тем, что содержит, по меньшей мере, один лазерный анемометр (50), добавленный к первичной или вторичной схемам детектирования или заменяющий, по меньшей мере, частично канал измерения первичной схемы детектирования или вторичной схемы детектирования для измерения, по меньшей мере, одного параметра истинной скорости летательного аппарата, при этом упомянутый лазерный анемометр установлен в гнезде вблизи внешней обшивки летательного аппарата и защищен иллюминатором, обеспечивающим оптическое прохождение лазерных лучей.
2. Система по п.1, отличающаяся тем, что лазерный анемометр (51) образует, по меньшей мере, частично вторичную схему (2′) детектирования.
3. Система по п.1, отличающаяся тем, что:
вторичная схема (2) детектирования содержит, по меньшей мере, одно устройство (43, 44) измерения статического давления, по меньшей мере, одно устройство (40) измерения динамического давления и, по меньшей мере, одно устройство (41, 42) обработки данных, поступающих от устройств измерения,
анемометр образует схему (3) мониторинга параметров.
4. Система по п.1, отличающаяся тем, что анемометр (52) интегрирован во второй канал (30) измерения первичной схемы детектирования.
5. Система по п.4, отличающаяся тем, что первичная схема (1′) содержит третий канал (20) измерения, аналогичный первому каналу измерения.
6. Система по п.4, отличающаяся тем, что первичная схема содержит третий канал измерения, в который интегрирован второй анемометр.
| POGOSOV G A ET AL | |||
| USE OF ON BOARD LASER DOPPLER SYSTEM TO MEASURE THE WIND SPEED PARAMETERS OF AIRCRAFT FLIGHT, MEASUREMENT TECHNIQUES CONSULTANTS BUREAU, NEW YORK US, v.37, №9, September 1994 (1994-09), p.1036-1041, XP000524482 ISSN: 0543-1972 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU374822A1 |
| US 4483614 A, 20.11.1984 | |||
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 2001 |
|
RU2196358C2 |

