Изобретение относится к области морских лагов, предназначенных для измерения скорости морского объекта.
Известны лаги (US №5694372, US №3795893, SU №1840743) с расположением лучей гидроакустической антенны по схеме Янус, которая позволяет существенно снизить погрешности измерения скорости морского объекта при волнении моря и наличии вертикальной скорости объекта.
В настоящее время в доплеровских лагах используется частотный подход, требующий оценки спектра в форме периодограммы на основе преобразования Фурье реализации эхосигнала. Эта оценка обладает свойством несостоятельности и требует для своей выработки значительного времени, приводя к повышенной погрешности и временной задержке в определении скорости. Эхосигнал с достаточной адекватностью аппроксимируется узкополосным случайным процессом, свойства которого определяются неоднородностью отражающей поверхности, конечной шириной диаграммы направленности, условиями распространения, шумом приемника и т.п.
Ближайшим аналогом (прототипом) заявленного изобретения является устройство, описанное в авторском свидетельстве SU №1840743. Устройство-прототип содержит задающий генератор, формирователь программы излучения, усилитель мощности, акустическую антенну, приемно-индикаторное устройство.
Прототип имеет следующие недостатки: низкая частота выработки выходной информации, что не позволяет использовать лаг-прототип на динамичных объектах; зависимость работы лага от внешнего источника глубины.
Задачи, которые решает данное изобретение, заключаются в повышении быстродействия и точности результатов измерения скорости объекта за счет применения оптимального многоальтернативного алгоритма обработки эхосигнала, основанного на банке фильтров Калмана, а также в упрощении и удешевлении конструкции гидроакустического лага, увеличении надежности его работы, облегчении технического обслуживания изделия.
Решение вышеизложенных задач достигается за счет:
- применения алгоритма многоальтернативной фильтрации с использованием банка фильтров Калмана в задаче постобработки эхосигнала;
- реализации алгоритмов цифровой обработки сигнала на стадии подготовки сигнала к постобработке;
- использования схемы Янус в гидроакустической антенне;
- применения стандартного конструктива «Евромеханика 3U» и современной элементной базы.
Сущность изобретения поясняется фиг.1, на которой представлена структурная схема гидроакустического лага.
В состав лага входят:
1 - Четырехлучевая многоэлементная гидроакустическая антенна, представляющая собой фазированную решетку элементов;
2 - Антенный переключатель, предназначенный для разделения сигнала по каналам в режиме приема эхосигнала;
3 - Коммутатор излучения, предназначенный для выбора излучаемого диаметра антенны в режимах работы на больших или малых глубинах под излучающей поверхностью антенны;
4 - Схема согласования антенны, предназначенная для настройки резонанса антенны и снижения потерь мощности в режиме излучения;
5 - Усилитель мощности, представляющий собой схему полного моста, собранную на мощных полевых транзисторах ультразвукового диапазона с управлением от сильноточных полумостовых драйверов;
6 - Коммутатор приемных сигналов, предназначенный для выбора приема отраженного эхосигнала от антенны на малых глубинах, на больших глубинах под излучающей поверхностью антенны; использования тестового сигнала для режима контроля тракта приема;
7 - Дифференциальный приемник эхосигналов, предназначенный для точного приема отраженных эхосигналов и формирования характеристики направленности антенны в режиме приема. Особенностью этого узла является применение полупроводникового элемента, вместо обычно используемого для этих целей приемного трансформатора;
8 - Программируемый усилитель с цифровым управлением, предназначенный для построения зависящей от глубины под килем характеристики усиления отраженных эхосигналов;
9 - Полосовой фильтр, предназначенный для выделения сигнала в рабочей полосе частот перед последующим аналого-цифровым преобразованием;
10 - Аналого-цифровой преобразователь, предназначенный для получения цифровых отчетов эхосигнала по четырем каналам;
11 - Цифровой гетеродин, предназначенный для смещения области рабочих частот эхосигнала с ультразвукового спектра в область низких частот, реализован аппаратно на программируемой логической интегральной схеме (ПЛИС);
12 - Цифровой фильтр с дециматором, необходимые для выделения области рабочих частот и снижения частоты квантования отраженного эхосигнала, реализованы на ПЛИС;
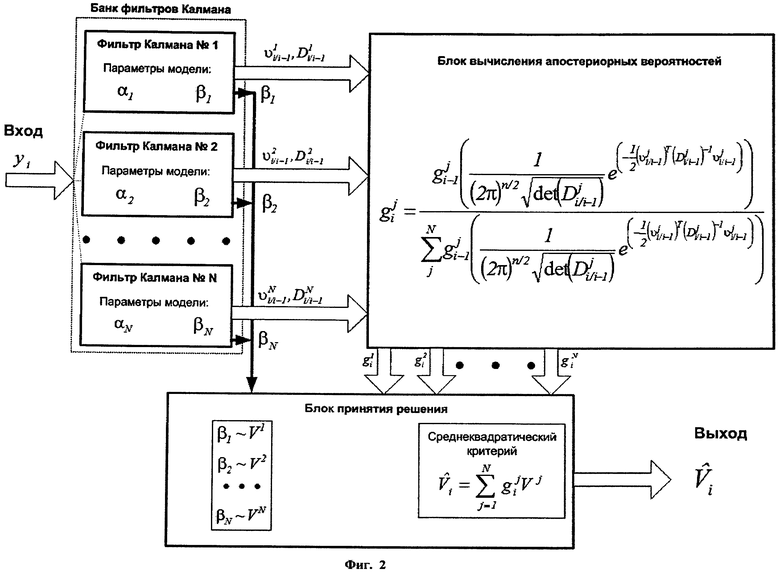
13 - Цифровой сигнальный процессор (DSP), предназначенный для вычисления конечного результата обработки эхосигналов и получения продольной и поперечной скоростей объекта по алгоритму многоальтернативной фильтрации, с использованием банка фильтров Калмана. Блок-схема алгоритма показана на фиг.2. На фиг.1 не показаны такие части вычислительной системы, необходимые для работы DSP процессора, как ОЗУ, ПЗУ, система получения данных после предобработки эхосигналов;
14 - Контроллер интерфейсов UART, предназначенный для организации обмена конечной информацией с потребителем по протоколу NMEA 0183. Реализован в ПЛИС;
15 - Приемопередатчики интерфейсов, предназначенные для согласования уровней сигналов интерфейсов RS-232 и RS-422.
Устройство работает следующим образом.
После включения питания запускается вычислительная система лага, состоящая из DSP-процессора 13 и контроллера интерфейсов 14. Выполняется предпусковой контроль, который включает в себя проверку целостности программного обеспечения, проверку памяти, проверку функционирования приемного тракта методом подачи на вход коммутатора приемных сигналов 6 тестового сигнала. Далее вычислительная система переходит в режим готовности и ожидает прихода внешней команды начала измерения по интерфейсу RS-232 или RS-422 через приемопередатчики 15 и контроллер UART 14. По приходу внешней команды подается силовое питание на усилитель мощности 5 и начинается цикл измерения глубины под килем корабля. Диапазон глубин работы лага разбит на шесть поддиапазонов, в которых происходит последовательный поиск глубины до дна, начиная с самого старшего диапазона. Для поиска глубины до дна формируется зондирующий импульс в усилителе мощности 5, импульс поступает на гидроакустическую антенну 1 через схему согласования антенны 4, коммутатор излучения 3 (который коммутирует необходимую часть антенны 1 в зависимости от текущей глубины под килем), антенный переключатель 2. Эхосигнал, который отражается от дна, поступает обратно на гидроакустическую антенну 1. Время между началом излучения и приемом эхосигнала пропорционально наклонной дальности до грунта.
В фазе приема отраженный сигнал с гидроакустической антенны поступает на антенный переключатель 2, затем на коммутатор приемных сигналов 6, который пропускает сигнал дальше в зависимости от коммутации антенны, затем отраженный сигнал усиливается на дифференциальном приемнике 7. На программируемом усилителе 8 реализована схема временной автоматической регулировки усиления (ВАРУ) в зависимости от предполагаемой глубины до дна на текущем времени поиска. Закон ВАРУ выбран близким к экспоненциальному. После прохождения усилительного тракта, предварительной фильтрации на полосовом фильтре 9 и оцифровки с помощью АЦП 10, а затем гетеродинирования на цифровых гетеродинах 11 на вход цифровых фильтров с дециматором 12 поступают данные со следующих четырех каналов: нос (Н); корма (К); левый борт (ЛБ); правый борт (ПБ).
Постобработка в режиме поиска глубины представляет собой и происходит в DSP-процессоре 13:
- вычисление среднеквадратичных значений (СКЗ) сигнала в приемном тракте;
- поиск максимальных значений СКЗ сигнала для каждого из поддиапазонов;
- сравнение максимальных значений с пороговым (пороговое значение выбирается больше, чем уровень шумовой составляющей сигнала);
- выбор максимального значения, превышающего пороговый уровень (остальные значения, превышающие пороговый уровень, считаются отражением сигнала от звукорассеивающих слоев и могут быть использованы в случае необходимости измерения лагом относительной скорости).
В контроллер интерфейсов UART 14 передается текущее значение глубины под килем.
После окончания цикла поиска глубины система переходит в режим измерения скорости объекта, при этом формирование импульсов излучения и прием отраженных сигналов происходит на тех же устройствах, что и в режиме поиска глубины. В режиме измерения скорости в устройстве:
- формируется зондирующий импульс, длительность которого пропорциональна найденной дальности до грунта (глубине под килем);
- осуществляется прием и усиление эхосигнала (коэффициент усиления на всем протяжении цикла измерения скорости не изменяется и остается соответствующем текущей дальности до грунта);
- выполняется предобработка эхосигнала (гетеродинирование, фильтрация и децимация);
- в DSP-процессоре 13 запускается итерационный алгоритм оценивания скорости объекта с использованием банка фильтров Калмана;
- после того как суммарная длительность эхосигнала составляет не менее 1 сек и одна из апостериорных вероятностей гипотез превышает уровень 0.9, вырабатывается оценка скорости с уровнем среднеквадратической погрешности не более 0.03 узла.
При малых глубинах под килем в одном цикле измерения скорости, формируется несколько зондирующих импульсов, для того чтобы набрать суммарную длительность эхосигнала, равную 1 сек. Для работы на небольших глубинах используется только центральная часть гидроакустической антенны, при работе на больших глубинах используется полная поверхность антенны.
Алгоритм функционирования DSP-процессора при оценивании скорости.
Обработка сигнала по алгоритму многоальтернативной фильтрации с использованием банка фильтров Калмана выполняется в DSP-процессоре. Возможность применения многоальтернативного алгоритма порождена предлагаемым достаточно адекватным описанием эхосигнала на входе приемника (измерения)

где z(t) - марковский узкополосный случайный процесс второго порядка, описывающий эхосигнал; ν(t) - аддитивный белый шум с интенсивностью R, например шум приемника. Спектральная плотность z(t) аппроксимируется следующей дробно-рациональной спектральной плотностью, передающей основные характеристики эхосигнала (наличие доплеровского сдвига частоты, ширина спектра):

где σ2 - дисперсия процесса; α и β - параметры модели, определяющие ширину (α) и центральную частоту спектральной плотности (β).
Эта дробно-рациональная спектральная плотность может быть записана в форме пространства состояний:
где x1, x2 - компоненты вектора состояния; w - порождающий белый шум с интенсивностью Q.
Работа алгоритма многоальтернативной фильтрации поясняется блок-схемой, приведенной на фиг.2. Сигнал y(t) (в дискретном виде yi, т.е. yi=y(ti)), поступает на вход банка фильтров Калмана. Каждый фильтр из банка настроен на аппроксимирующую модель (3) с параметрами αj и βj, соответствующими ожидаемому значению скорости из диапазона неопределенности (диапазон неопределенности параметров дискритизован и разбит на N составляющих). В каждый момент времени (частота дискретизации 25 кГц) с выходов фильтров Калмана из банка в блок выработки апостериорных вероятностей альтернатив (гипотез) передаются значения невязки прогноза  и ковариация невязки прогноза
и ковариация невязки прогноза  (j=1…N). По значениям
(j=1…N). По значениям  и
и  рассчитываются апостериорные вероятности
рассчитываются апостериорные вероятности  наступления события, свидетельствующего, что эхосигнал на входе соответствует модели (3) с параметрами αj и βj. По вычисленным апостериорным вероятностям на каждом шаге дискретизации оценивается скорость движения объекта
наступления события, свидетельствующего, что эхосигнал на входе соответствует модели (3) с параметрами αj и βj. По вычисленным апостериорным вероятностям на каждом шаге дискретизации оценивается скорость движения объекта  по среднеквадратическому критерию
по среднеквадратическому критерию
где Vj пропорционально βj.
Вышеописанная процедура оценки скорости движения объекта выполняется параллельно для каждого из четырех гидроакустических лучей антенны 1.
Конечным результатом вычислений является продольная (Vx) и поперечная (Vy) составляющие скорости движения объекта, вычисляемые по формулам


где  - оценка скорости в носовом направлении объекта;
- оценка скорости в носовом направлении объекта;  - оценка скорости в кормовом направлении объекта;
- оценка скорости в кормовом направлении объекта;  - оценка скорости в направлении левого борта объекта;
- оценка скорости в направлении левого борта объекта;  - оценка скорости в направлении правого борта объекта.
- оценка скорости в направлении правого борта объекта.
Далее значения Vx и Vy поступают в контроллер интерфейсов UART 14 и передаются потребителю через приемопередатчики RS-232 и RS-422 (блоки 15).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости судна доплеровским лагом | 2018 |
|
RU2702696C1 |
| Способ измерения частоты эхосигнала в доплеровском лаге | 2017 |
|
RU2670714C9 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2672464C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2655019C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| ИМИТАТОР ЭХОСИГНАЛА ЭХОЛОТА | 2015 |
|
RU2604170C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ | 2019 |
|
RU2699938C1 |
Изобретение относится к области гидроакустических лагов, предназначенных для измерения скорости морского объекта. Техническим результатом изобретения является упрощение и удешевление конструкции лага при повышении точности измерений (предельная погрешность -0.1 уз). Гидроакустический доплеровский лаг содержит четырехлучевую гидроакустическую антенну, антенный переключатель, коммутатор излучения, схему согласования антенны, усилитель мощности, коммутатор приемных сигналов, дифференциальный приемник, программируемый усилитель, полосовой фильтр, аналого-цифровой преобразователь, цифровой гетеродин, цифровой фильтр с дециматором, контроллер UART, приемопередатчики RS-232 и RS-422. Лаг дополнительно содержит DSP-процессор, на вход которого поступают данные с цифрового фильтра с дециматором от четырех каналов измерения скорости объекта (нос, корма, левый борт, правый борт), с помощью которого реализуется обработка эхосигнала методом многоальтернативной фильтрации, использующей банк фильтров Калмана и направленной на оценку параметра модели эхосигнала, соответствующего значению скорости объекта, с предельной погрешностью не более 0.1 уз за время не более 4 сек, и выдаются результирующие значения скорости объекта через контроллер UART и приемопередатчики RS-232 и RS-422 внешнему потребителю. 2 ил.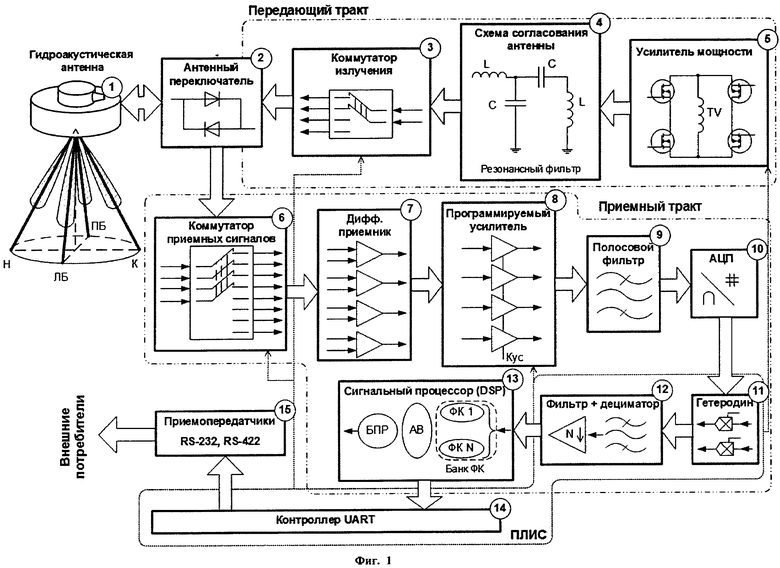
Гидроакустический доплеровский лаг, содержащий четырехлучевую гидроакустическую антенну, антенный переключатель, коммутатор излучения, схему согласования антенны, усилитель мощности, коммутатор приемных сигналов, дифференциальный приемник, программируемый усилитель, полосовой фильтр, аналого-цифровой преобразователь, цифровой гетеродин, цифровой фильтр с дециматором, контроллер UART, приемопередатчики RS-232 и RS-422, отличающийся тем, что он дополнительно содержит DSP-процессор, на вход которого поступают данные с цифрового фильтра с дециматором от четырех каналов измерения скорости объекта (нос, корма, левый борт, правый борт), с помощью которого реализуется обработка эхосигнала методом многоальтернативной фильтрации, использующей банк фильтров Калмана и направленной на оценку параметра модели эхосигнала, соответствующего значению скорости объекта с предельной погрешностью не более 0,1 узла за время не более 4 с, и выдается результирующие значения скорости объекта через контроллер UART и приемопередатчики RS-232 и RS-422 внешнему потребителю.
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1973 |
|
SU1840743A1 |
| Способ образования вихревой воронки в верхнем бьефе гидротехнических сооружений | 1947 |
|
SU75062A1 |
| Устройство для передачи распорядительных сигналов из центрального пункта нескольким установкам | 1931 |
|
SU27863A1 |
| Устройство для заседаний по телефону | 1931 |
|
SU35900A1 |
| ПРИЕМНЫЙ ТРАКТ ИМПУЛЬСНОГО ВЫСОКОТОЧНОГО ДОПЛЕРОВСКОГО ЛАГА | 1997 |
|
RU2120131C1 |
| US 2007233389 A1, 04.10.2007 | |||
| WO 2008144139 A1, 27.11.2008. | |||

