Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна.
Измерение абсолютной скорости судна обеспечивается с помощью доплеровского лага [1-6]. И хотя на надводных кораблях и судах вместо доплеровского лага все чаще используется спутниковая навигационная система, на подводных лодках и подводных аппаратах (обитаемых и необитаемых) доплеровский лаг продолжает оставаться основным средством измерения абсолютной скорости.
В качестве прототипа выбран описанный в работе [1] и поясненный на фиг. 1 способ измерения скорости судна доплеровским лагом, включающий циклическое излучение под наклоном к дну тонального зондирующего сигнала, формирование на каждом цикле излучения - приема характеристики направленности для приема сигнала с направления излучения; обнаружение эхосигналов на каждом цикле излучения - приема на выходе сформированной характеристики направленности; определение частоты обнаруженного эхосигнала; вычисление средней частоты эхосигналов, полученных на разных циклах излучения; вычисление скорости судна по формуле:

где V - скорость судна, м/с;
ƒЗC - частота зондирующего сигнала (ЗС), Гц;
ƒЭС/ср - средняя частота эхосигналов (ЭС), полученных на разных циклах излучения, Гц;
ψизл - угол между направлением излучения ЗС и направлением вертикально вниз, град (как правило, ψизл=30°);
Сzv - скорость звука в воде, м/с.
Недостатком описанного способа является низкая точность определения скорости судна при наличии течения и водных звукорассеивающих слоев (далее - звукорассеивающий слой). Объясняется это тем, что при наличии течения и водных звукорассеивающих слоев на одном цикле излучения может быть обнаружено несколько эхосигналов с разными частотами. В результате при осреднении частот всех ЭС, обнаруженных на разных циклах излучения, полученная средняя частота будет смещена относительно фактической частоты ЭС, отраженного от дна. Как следствие, будет смещена и оценка скорости судна, вычисляемая по формуле (1).
Решаемая техническая проблема - повышение эксплуатационных характеристик доплеровского лага.
Достигаемый технический результат - повышение надежности обнаружения эхосигналов, отраженных от морского дна, при наличии во входном сигнале, кроме эхосигналов, отраженных от дна, также эхосигналов, отраженных от звукорассеивающих слоев.
Заявляемый способ достигается следующими действиями, отличающими его от прототипа:
1) при обнаружении каждого эхосигнала дополнительно к определению его частоты определяется время его обнаружения относительно времени излучения зондирующего сигнала;
2) оценки частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения зондирующего сигнала, перед осреднением подвергаются траекторному анализу, реализуемому, например, с использованием алгоритма последовательного анализа Вальда [7]. В результате траекторного анализа эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев;
3) осреднение частот эхосигналов выполняется отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого звукорассеивающего слоя.
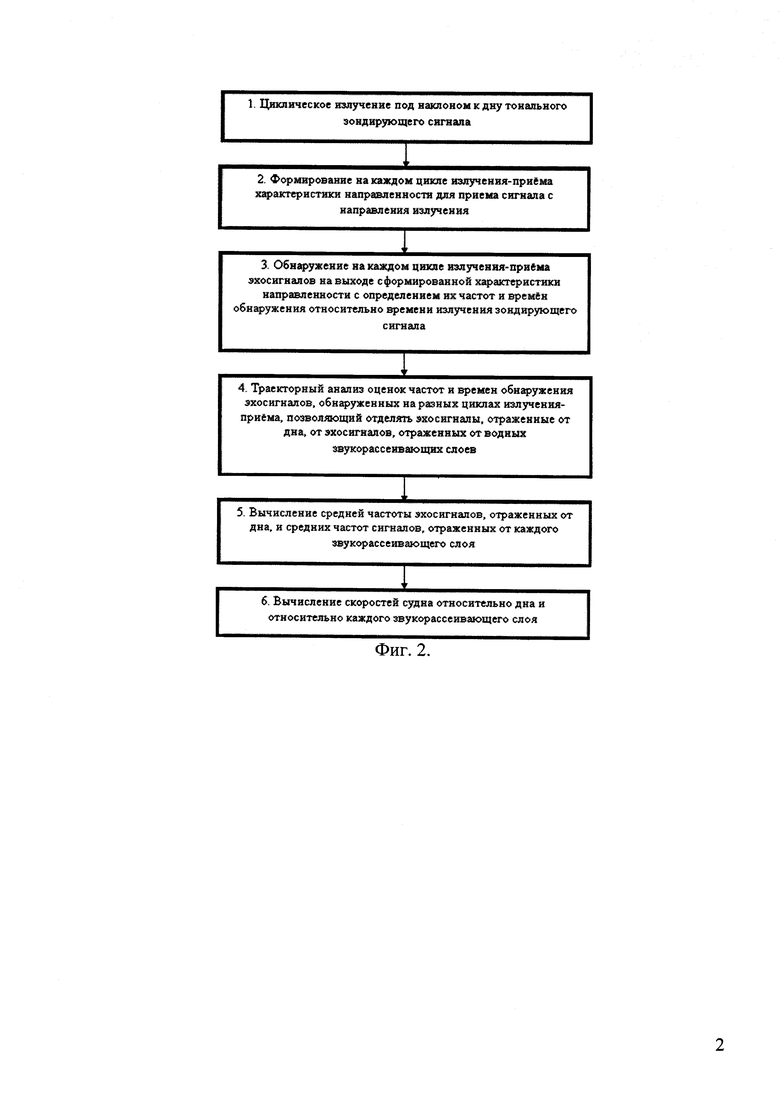
Блок схема заявляемого способа изображена на фиг. 2.
В блоке 1 осуществляется циклическое излучение под наклоном к дну тонального зондирующего сигнала.
В блоке 2 на каждом цикле излучения зондирующего сигнала выполняется формирование характеристики направленности для приема сигнала с направления излучения.
В блоке 3 на каждом цикле излучения выполняется процедура обнаружения эхосигналов. Для каждого обнаруженного эхосигнала определяются его частота и время его обнаружения относительно времени излучения зондирующего сигнала.
В блоке 4 осуществляется траекторный анализ оценок частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения, в результате чего эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев.
В блоке 5 выполняется усреднение частот эхосигналов отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого звукорассеивающего слоя.
В блоке 6 по формуле (1) вычисляются скорости судна относительно дна и относительно каждого звукорассеивающего слоя.
Таким образом, обеспечивается повышение надежности обнаружения ЭС от морского дна при наличии во входном сигнале, кроме эхосигналов, отраженных от дна, также эхосигналов, отраженных от звукорассеивающих слоев, за счет применения блока траекторного анализа принятых ЭС, позволяющего производить межцикловую идентификацию и корректное усреднение параметров ЭС.
Технический результат подтвержден имитационным моделированием и экспериментально.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги, - Л.: Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н. и др. Судовые измерители скорости.- Л.: Судостроение, 1978.
3. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхосигнала, основанным на использовании банка фильтров Калмана.
4. Богородский В.В. Гидроакустическая техника исследования и освоения океана.- Л.: Гидрометиздат, 1984.
5. Гидроакустические навигационные средства. Под ред. В.В. Богородского. - Л.: Судостроение, 1983, 262 с.
6. Виноградов К.А., Новиков И.А. Гидроакустические навигационные системы и средства // Навигация и гидрография, ГНИИНГИ МО РФ, 1999, №7.
7. Ширяев А.Н. Статистический последовательный анализ. - М.: Наука, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости судна доплеровским лагом | 2018 |
|
RU2702696C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2672464C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Способ измерения частоты эхосигнала в доплеровском лаге | 2017 |
|
RU2670714C9 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2677102C1 |
| ГИДРОАКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ЛАГ С АЛГОРИТМОМ МНОГОАЛЬТЕРНАТИВНОЙ ФИЛЬТРАЦИИ ЭХОСИГНАЛА, ОСНОВАННЫМ НА ИСПОЛЬЗОВАНИИ БАНКА ФИЛЬТРОВ КАЛМАНА | 2010 |
|
RU2439613C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |

Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения абсолютной скорости судна. Достигаемый технический результат - повышение надежности обнаружения эхосигналов, отраженных от морского дна, при наличии во входном сигнале, кроме эхосигналов, отраженных от дна, также эхосигналов, отраженных от водных звукорассеивающих слоев. Заявляемый способ достигается следующими действиями: при обнаружении каждого эхосигнала дополнительно к определению его частоты определяется время его обнаружения относительно времени излучения зондирующего сигнала; оценки частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения зондирующего сигнала, перед осреднением подвергаются траекторному анализу, реализуемому, например, с использованием алгоритма последовательного анализа Вальда. В результате траекторного анализа эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев; осреднение частот эхосигналов выполняется отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого звукорассеивающего слоя. 2 з.п. ф-лы, 2 ил.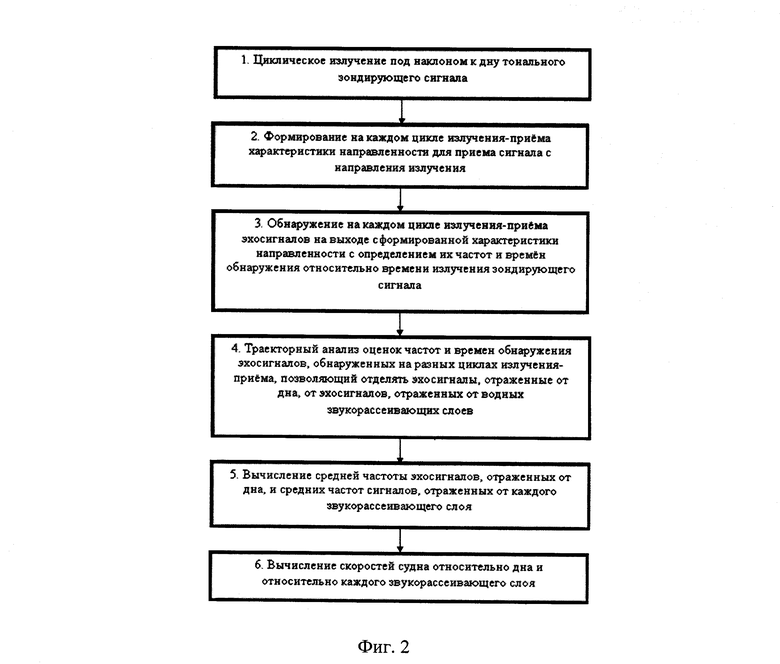
1. Способ измерения скорости судна доплеровским лагом, включающий циклическое излучение под наклоном к дну тонального зондирующего сигнала, формирование на каждом цикле излучения - приема характеристики направленности для приема сигнала с направления излучения, обнаружение на каждом цикле излучения - приема эхосигналов на выходе сформированной характеристики направленности с определением их частот, вычисление средней частоты всех эхосигналов, обнаруженных на всех циклах излучения - приема, с использованием которой вычисляется скорость судна, отличающийся тем, что при обнаружении каждого эхосигнала дополнительно к определению его частоты определяется время его обнаружения относительно времени излучения зондирующего сигнала.
2. Способ по п. 1, отличающийся тем, что оценки частот и времен обнаружения эхосигналов, обнаруженных на разных циклах излучения - приема, перед осреднением подвергаются траекторному анализу, в результате которого эхосигналы, отраженные от дна, отделяются от эхосигналов, отраженных от звукорассеивающих слоев.
3. Способ по п. 2, отличающийся тем, что осреднение частот эхосигналов выполняется отдельно для эхосигналов, отраженных от дна, и эхосигналов, отраженных от каждого водного звукорассеивающего слоя.
| Способ образования вихревой воронки в верхнем бьефе гидротехнических сооружений | 1947 |
|
SU75062A1 |
| Устройство для передачи распорядительных сигналов из центрального пункта нескольким установкам | 1931 |
|
SU27863A1 |
| ПРИЕМНЫЙ ТРАКТ ИМПУЛЬСНОГО ВЫСОКОТОЧНОГО ДОПЛЕРОВСКОГО ЛАГА | 1997 |
|
RU2120131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2037847C1 |
| Устройство для придания блеска завитым целлюлозным волокнам | 1931 |
|
SU38959A1 |
| US 20070233389 A1, 04.10.2007. | |||

