Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна.
Измерение абсолютной скорости судна обеспечивается с помощью доплеровского лага (ДЛ) [1-7]. И хотя на надводных кораблях и судах вместо ДЛ все чаще используется спутниковая навигационная система, на подводных лодках и подводных аппаратах (обитаемых и необитаемых) ДЛ продолжает оставаться основным средством измерения абсолютной скорости.
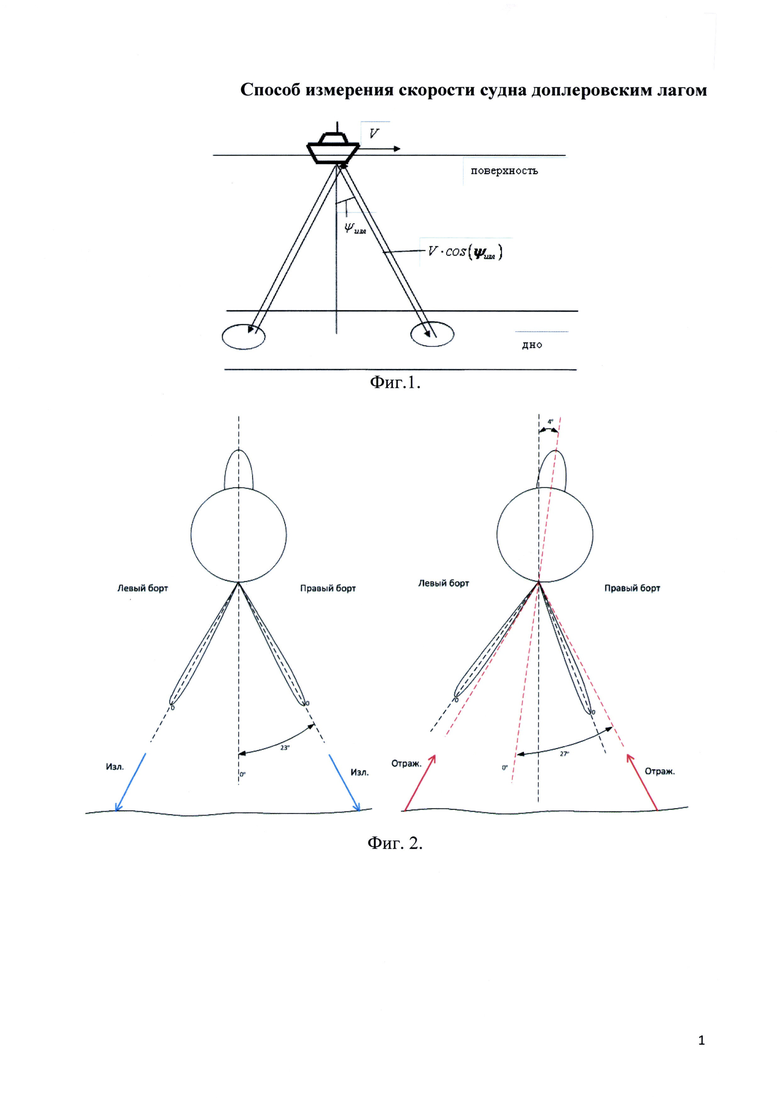
Для повышения точности измерения скорости судна широко применяется схема «Янус» формирования одновременно двух симметричных направленных в разные стороны характеристик направленности приемно-излучающей антенны (фиг. 1). На фиг. 1 приняты следующие обозначения:
V - скорость судна,
ψизл - угол между направлением вертикально вниз и направлением излучения.
Схема «Янус» обеспечивает [1]:
- устранение нелинейной зависимости скорости судна от доплеровской частоты;
- существенное уменьшение (в определенных пределах) погрешности измерения скорости, обусловленной изменением пространственной ориентации лучей при качке и статических наклонах судна (до 3-4°) без привлечения внешней информации;
- компенсацию погрешности, вызванной изменением угла прихода луча при смещении судна за время распространения сигнала;
- уменьшение влияния рефракционных искажений сигнала;
- увеличение в два раза скоростной чувствительности лага (по сравнению с односторонней схемой);
- снижение влияния вертикальной составляющей скорости судна на точность измерения горизонтальных составляющих и др.
Как правило, на практике одновременно используются две схемы «Янус» во взаимно перпендикулярных направлениях, что позволяет повысить точность измерения двух проекций скорости судна.
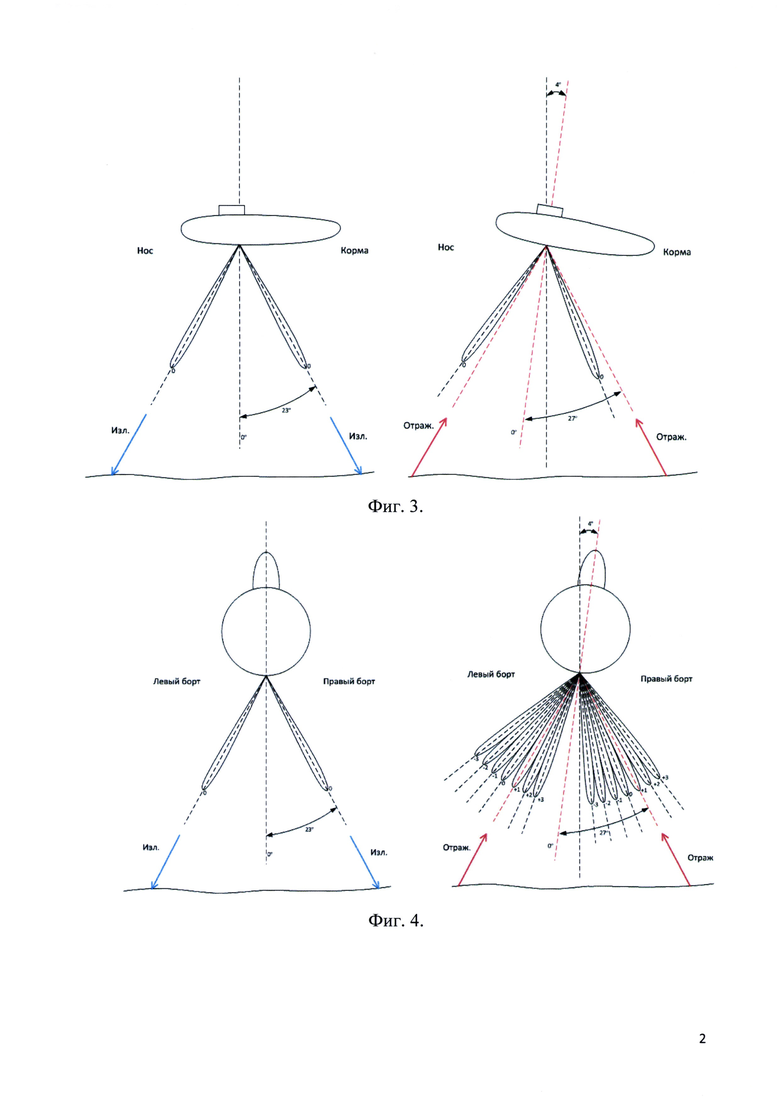
Одним из факторов, снижающих качество работы доплеровского лага (а именно помехоустойчивость и точность измерения скорости), является качка судна на волнении [1, 2]. Качка судна может приводить к потере акустического контакта с дном моря. Причиной потери контакта является изменение угловой ориентации антенны за время распространения акустического сигнала до грунта и обратно. Вследствие этого характеристика направленности (ХН) антенны на приеме не перекрывает озвученный участок морского дна (фиг. 2 и 3). На фиг. 2 и 3 показано излучение и прием отраженного сигнала однолучевыми характеристиками направленности при существенной бортовой качке.
Для борьбы с негативным влиянием качки в известных работах предлагается три способа [1, 2]:
1) механическая стабилизация антенны;
2) электронная стабилизация антенны при излучении и приеме;
3) расширение ХН при приеме.
Недостатком первых двух способов является необходимость введения в состав ДЛ датчиков текущих значений бортовой и килевой качки, а также существенное усложнение конструкции ДЛ, особенно при реализации первого способа.
Недостатком третьего способа является снижение точности измерения скорости судна, поскольку ширина ХН является одним из факторов, определяющих точность измерения скорости ДЛ [1].
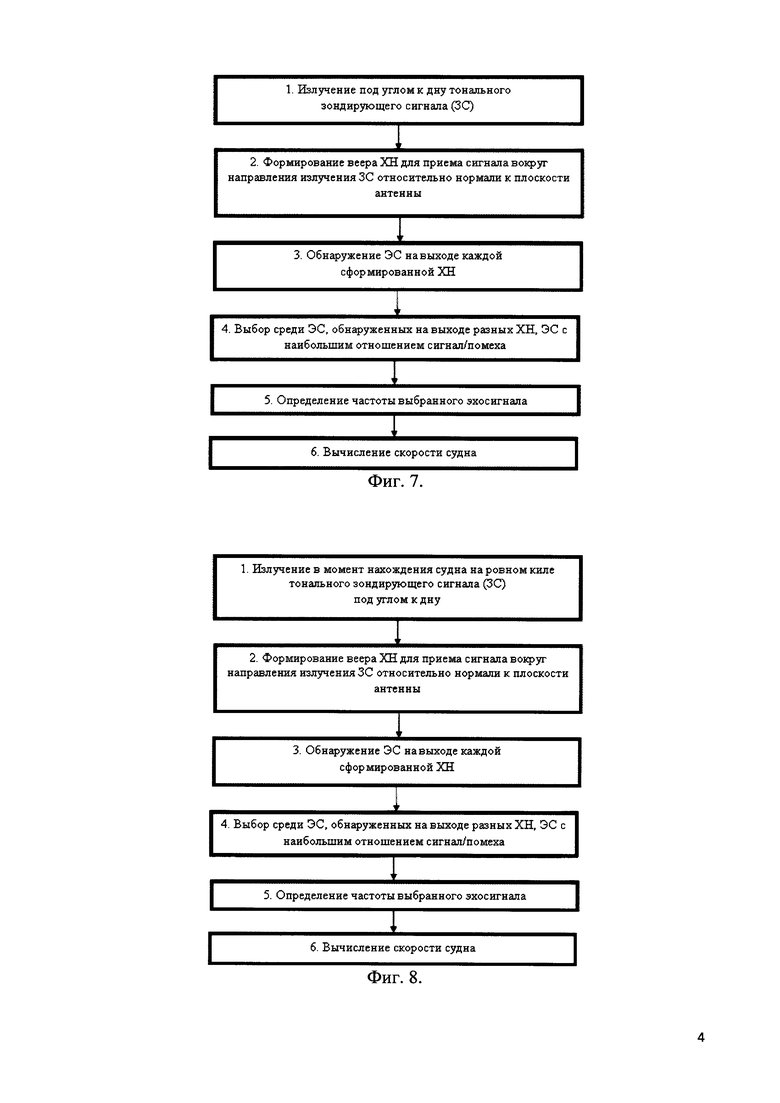
В качестве прототипа выбран описанный в работе [1] и поясненный на фиг. 4 и 5 способ измерения скорости судна доплеровским лагом, включающий [фиг. 6]: излучение под наклоном ψизл к вертикали тонального зондирующего сигнала (ЗС) длительностью ТТС; формирование характеристики направленности для приема сигнала с направления излучения относительно нормали к плоскости антенны; вычисление спектра сигнала, поступающего с выхода сформированной ХН, на интервале длительности ТТС с перекрытием не менее чем на 50% относительно предыдущего интервала той же длительности; выполнение процедуры обнаружения эхосигнала в вычисленном спектре. В случае обнаружения эхосигнала (ЭС) определение его частоты и с ее использованием вычисление скорости судна по формуле [1]:

где
fЗC - частота ЗС, Гц;
fЭС - частота эхосигнала (ЭС), Гц;
V - скорость судна, м/с;
ψизл - угол между направлением излучения ЗС и направлением вертикально вниз, град (как правило, ψизл = 30°);
Czν - скорость звука в воде, м/с.
Процедуры, реализуемые в блоках 3 и 4 фиг. 6, повторяются на интервале времени

где Hmax - максимальная глубина под килем, м.
На фиг. 4, 5 показан прием отраженного сигнала веером ХН при существенной бортовой качке. Фиг. 6 - блок-схема прототипа.
Решаемая техническая проблема - повышение эксплуатационных характеристик доплеровского лага.
Достигаемый с использованием изобретения технический результат - повышение надежности измерения скорости судна в условиях качки на волнении.
Указанный технический результат достигается путем применения трех технических решений.
Первое техническое решение (фиг. 4, 5 и 7) состоит в формировании при приеме дополнительно к ХН в направлении (относительно нормали к плоскости антенны) излучения ЗС двумерного веера ХН, в совокупности перекрывающих сектор телесных углов, в котором возможен приход эхосигнала, отраженного от дна. Размеры этого сектора: ±2ψ кил/max в диаметральной плоскости судна и ±2ψ борт/max в плоскости шпангоута, где ψ кил/max, ψ борт/max - максимально возможные величины углов килевой и бортовой качки соответственно, град. Следовательно, число ХН, которые необходимо дополнительно сформировать, равно



где Δϕкил, Δϕборт - ширина ХН антенны при приеме в диаметральной плоскости и в плоскости шпангоута соответственно, град;
[x] - операция вычисления минимального целого числа, превосходящего х.
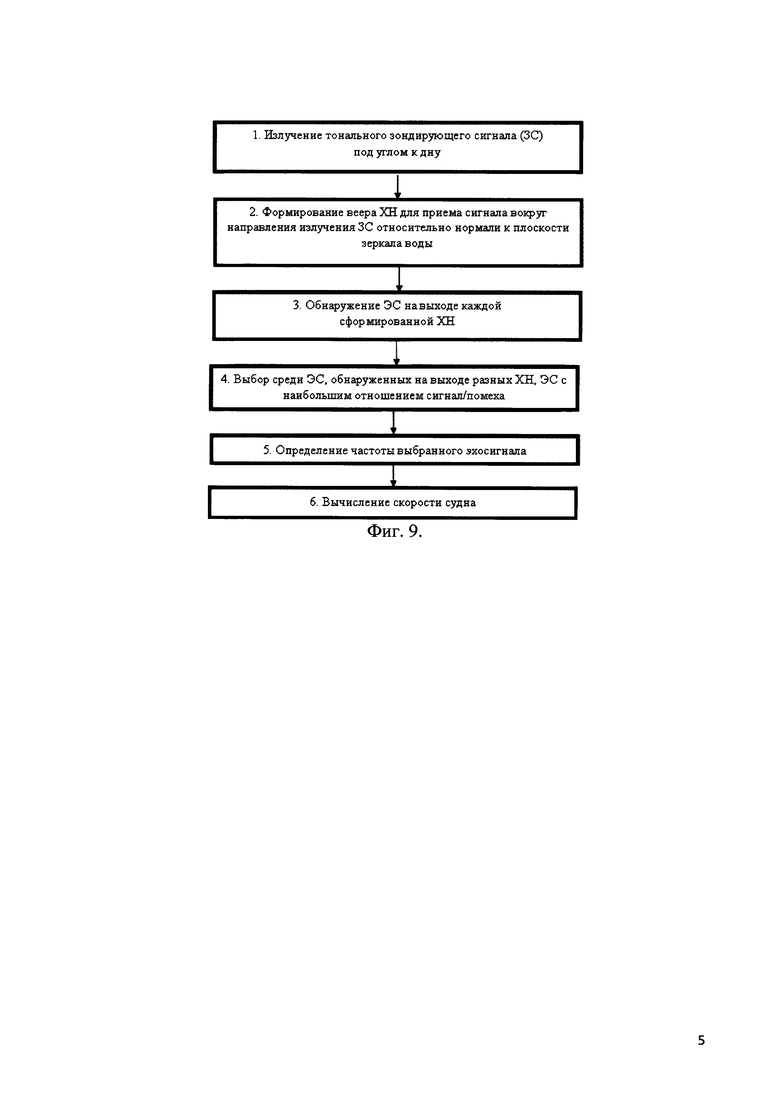
На фиг. 7 показана блок-схема заявляемого способа по п. 1 формулы изобретения. На фиг. 8 - блок-схема заявляемого способа по п. 2 формулы изобретения. На фиг. 9 - блок-схема заявляемого способа по п. 3 формулы изобретения.
Достоинством первого технического решения является повышение надежности измерения скорости судна в условиях качки, а недостатком - усложнение конструкции ДЛ за счет формирования веера ХН при приеме.
Второе техническое решение (фиг. 8) заключается в том, что тональные зондирующие сигналы излучаются в моменты, когда угол крена либо угол дифферента равен нулю. Это дает возможность уменьшить в 2 раза число ХН, необходимых для компенсации качки по первому техническому решению. То есть при излучении в момент, когда угол крена равен нулю

при излучении в момент, когда угол дифферента равен нулю

Достоинством второго технического решения по сравнению с первым техническим решением является упрощение конструкции ДЛ за счет уменьшения количества формируемых ХН при приеме, а недостатками - необходимость дополнительно использовать сигналы от датчиков крена и дифферента, а также увеличение времени измерения скорости судна ввиду ожидания моментов времени, когда судно окажется на ровном киле, т.е. когда угол крена либо угол дифферента станет равным нулю.
Третье техническое решение (фиг. 9) заключается в том, что тональные зондирующие сигналы излучаются в произвольные моменты времени, однако углы излучения (относительно вертикали) запоминаются, и веер ХН при приеме формируется вокруг направления излучения.
Достоинством третьего технического решения по сравнению с первым техническим решением является меньшее количество ХН, формируемых при приеме:


где  - скорость изменения угла дифферента и крена соответственно, град/с;
- скорость изменения угла дифферента и крена соответственно, град/с;
τзс - длительность тонального зондирующего сигнала, с.
Недостатками третьего технического решения являются необходимость дополнительно использовать сигналы от датчиков крена и дифферента, а также усложнение конструкции ДЛ за счет необходимости адаптивного формирования ХН при приеме.
Описанные технические решения могут применяться как по отдельности, так и совместно.
Таким образом, повышение надежности измерения скорости судна на качке достигается за счет формирования веера приемных ХН, благодаря которому отраженный от дна ЭС гарантированно будет принят антенной. Физическая реализуемость заявляемого метода подтверждена математическим моделированием.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги // Л.: Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н. и др. Судовые измерители скорости // Л.: Судостроение, 1978.
3. Гидроакустические навигационные средства. Под ред. В.В. Богородского. // Л.: Судостроение, 1983. 262 с.
4. Богородский В.В. Гидроакустическая техника исследования и освоения океана // Л.: Гидрометиздат, 1984.
5. Виноградов К.А., Новиков И.А., Гидроакустические навигационные системы и средства // Научно-технический журнал «Навигация и гидрография», 1999, №7.
6. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхосигнала, основанным на использовании банка фильтров Калмана.
7. А.П. Мартынюк, Е.В. Казакова. Уточнение характеристик направленности фазированных антенных решеток доплеровских лагов // Гiдроакустичний журнал (Проблеми, методи та засоби дослiджень Свiтового океану), 2009, №6, с. 60-67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости судна доплеровским лагом | 2018 |
|
RU2702696C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2672464C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
| Способ измерения частоты эхосигнала в доплеровском лаге | 2017 |
|
RU2670714C9 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2655019C1 |
| Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага | 2017 |
|
RU2655020C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2677102C1 |
| СПОСОБ НАСТРОЙКИ ПРИЕМНЫХ КАНАЛОВ УСТАНОВЛЕННОГО НА СУДНЕ ГИДРОАКУСТИЧЕСКОГО ДОПЛЕРОВСКОГО ЛАГА | 2004 |
|
RU2293360C2 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
| Способ определения скорости звука | 2021 |
|
RU2776959C1 |

Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения абсолютной скорости судна. Решаемая техническая проблема - увеличение надежности и точности работы доплеровского лага без значительного увеличения цены и габаритов аппаратуры. Достигаемый технический результат - повышение точности и помехоустойчивости измерения скорости судна в условиях качки на волнении. Указанный технический результат достигается путем применения одного из трех технических решений либо их совокупности. Первое техническое решение состоит в формировании при приеме дополнительно к ХН в направлении излучения (относительно нормали к плоскости антенны) двумерного веера ХН, в совокупности перекрывающих сектор телесных углов, в котором возможен приход эхосигнала, отраженного от дна. Второе техническое решение заключается в том, что зондирующие сигналы излучаются в моменты, когда угол крена либо угол дифферента судна равен нулю. Третье техническое решение заключается в том, что зондирующие сигналы излучаются в произвольные моменты времени, однако углы излучения (относительно нормали к зеркалу воды) запоминаются, и веер ХН при приеме формируется вокруг направления излучения относительно вертикали. 2 з.п. ф-лы, 9 ил.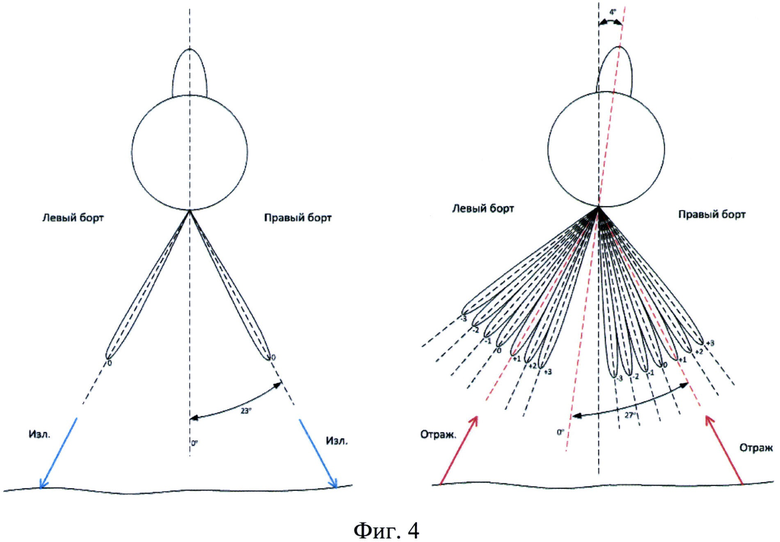
1. Способ измерения скорости судна доплеровским лагом, включающий излучение под наклоном ко дну тонального зондирующего сигнала, формирование характеристики направленности для приема сигнала с направления излучения относительно нормали к плоскости антенны, обнаружение отраженного от дна эхосигнала на выходе сформированной характеристики направленности, определение частоты обнаруженного эхосигнала, с использованием которой вычисление скорости судна, отличающийся тем, что при приеме сигнала дополнительно к характеристике направленности в направлении излучения зондирующего сигнала относительно нормали к плоскости антенны формируется двумерный веер характеристик направленности, также относительно нормали к плоскости антенны, перекрывающий сектор телесных углов, в котором в условиях бортовой и килевой качек на волнении возможен приход эхосигнала, отраженного от дна.
2. Способ по п. 1, отличающийся тем, что тональные зондирующие сигналы излучаются в моменты, когда угол крена либо угол дифферента равен нулю.
3. Способ по п. 1, отличающийся тем, что двумерный веер характеристик направленности при приеме формируется вокруг направления излучения зондирующего сигнала относительно вертикали.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ГИДРОАКУСТИЧЕСКОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ | 2003 |
|
RU2259572C2 |
| ГИДРОАКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ЛАГ С АЛГОРИТМОМ МНОГОАЛЬТЕРНАТИВНОЙ ФИЛЬТРАЦИИ ЭХОСИГНАЛА, ОСНОВАННЫМ НА ИСПОЛЬЗОВАНИИ БАНКА ФИЛЬТРОВ КАЛМАНА | 2010 |
|
RU2439613C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| US 3603920 A, 14.08.1969 | |||
| US 5694372 A, 02.12.1997. | |||

