Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна и глубины под килем с использованием гидроакустического доплеровского лага (ДЛ) [1-6].
Глубина под килем измеряется при помощи эхолота [4-6].
Как ДЛ, так и эхолот являются дорогостоящими устройствами, особенно при плавании в глубоководных районах, когда необходимо использовать относительно низкие частоты и, как следствие, иметь приемно-излучающую антенну больших габаритов. Поэтому было бы целесообразно использовать в качестве измерителя скорости судна и глубины под килем одно универсальное устройство - лаг-эхолот.
Совмещение функций ДЛ и эхолота в одном устройстве известно. Например, в ДЛ, описанном в изобретении [3], сначала измеряется глубина под килем, затем с использованием измеренной глубины рассчитывается допустимая длительность тонального сигнала, применяемого для измерения скорости судна. Недостатком такого технического решения является невозможность отслеживания изменения глубины под килем (т.е. рельефа дна) в процессе движения судна.
Для отслеживания рельефа дна необходимо глубину под килем измерять одновременно с измерением скорости судна. Но для этого нужно разрешить техническое противоречие между ДЛ и эхолотом. Оно состоит в том, что в ДЛ для обеспечения высокой точности измерения скорости судна используется тональный зондирующий сигнал (ЗС) большой длительности, определяемой по приближенной формуле [1]:

ТТС - длительность тонального ЗС, с;
Hdno - глубина под килем, м;
Czv - средняя скорость распространения ЗС, м/с.
При использовании ЗС такой длительности среднеквадратическая ошибка (СКО)  , измерения глубины составит
, измерения глубины составит

т.е. 33% от измеряемой глубины. Естественно, такая ошибка для практического использования неприемлема.
Для уменьшения ошибки измерения глубины необходимо вместо тонального зондирующего сигнала использовать сложный широкополосный сигнал с полосой частот ΔƒШС и малой длительностью ТШС, разрешение которого по времени (а следовательно и по глубине) пропорционально обратной величине его полосы частот. В результате СКО определения расстояния до дна будет определяться по формуле:

Например, при типовом значении ΔƒШС=1 кГц СКО определения расстояния до дна составит порядка 0,2 м, что достаточно для практического использования.
В качестве прототипа выберем описанный в работе [1] и поясненный условной блок-схемой (фиг. 1) способ измерения скорости судна доплеровским лагом, включающий излучение под наклоном ψизл тонального зондирующего сигнала с длительностью ТТС; формирование характеристики направленности (ХН) для приема сигнала с направления излучения; вычисление спектра сигнала, поступающего с выхода сформированной ХН, на интервале длительности ТТС с перекрытием не менее чем на 50% относительно предыдущего интервала той же длительности; выполнение процедуры обнаружения эхосигнала в вычисленном спектре. В случае обнаружения эхосигнала (ЭС) осуществляется определение его частоты и с ее использованием вычисление скорости судна по формуле:

где
ƒЗС - частота тонального ЗС, Гц;
ƒЭС - частота эхосигнала (ЭС), Гц;
V - скорость судна, м/с;
ψизл - угол между направлением излучения ЗС и направлением вертикально вниз, град (как правило, ψизл=30°);
Процедуры, реализуемые в блоках 3 и 4, повторяются на интервале времени

где Hmax - максимальная глубина под килем, м.
Решаемая техническая проблема - расширение функций ДЛ.
Технический результат - повышение точности измерения доплеровским лагом расстояния до дна.
Указанный технический результат изобретения достигается тем, что следом за излучением доплеровским лагом тонального ЗС (далее - тональный сигнал) с большой длительностью ТТС, рассчитанной по формуле (1), дополнительно излучается широкополосный зондирующий сигнал (далее - широкополосный сигнал) с полосой частот ΔƒШС и с малой длительностью ТШС. В результате по отраженному от дна тональному сигналу с высокой точностью определяется скорость судна, а по широкополосному сигналу - расстояние до дна.
Полоса частот ΔƒШС широкополосного сигнала определяется с учетом формулы (3), исходя из заданной точности измерения глубины и полосы пропускания излучающей антенны. Длительность широкополосного сигнала ТШС определяется исходя из примерного равенства помехоустойчивости обнаружения тонального и широкополосного сигналов, что имеет место при выполнении условия

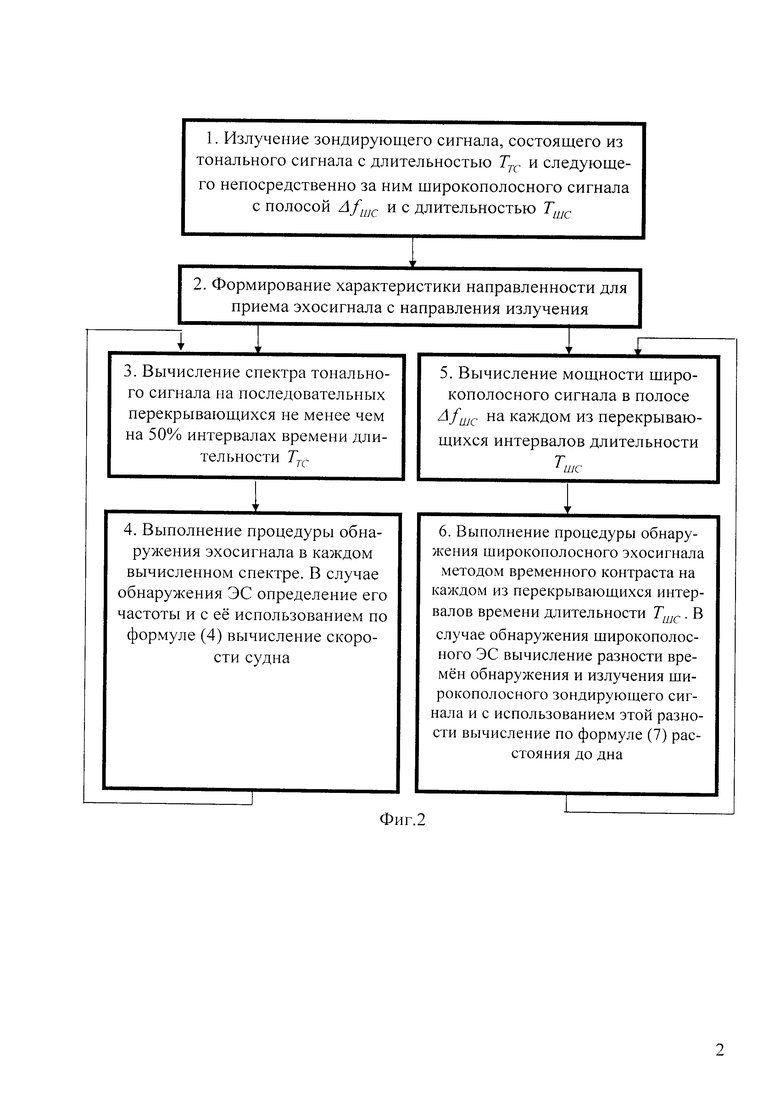
Блок-схема заявляемого способа изображена на фиг. 2.
В блоке 1 осуществляется излучение тонального зондирующего сигнала, состоящего из тонального сигнала с большой длительностью ТТС и следующего непосредственно за ним широкополосного сигнала с полосой ΔƒШС и с малой длительностью ТШС.
В блоке 2 выполняется формирование характеристики направленности для приема сигнала с направления излучения.
В блоке 3 осуществляется вычисление спектра сигнала на последовательных перекрывающихся не менее чем на 50% интервалах времени длительности ТТС.
В блоке 4 выполняется процедура обнаружения тонального эхосигнала в каждом вычисленном спектре. В случае обнаружения тонального ЭС определяется его частота и с ее использованием по формуле (3) вычисляется скорость судна.
В блоке 5 вычисляется мощность широкополосного сигнала в полосе ΔƒШС на каждом из перекрывающихся интервалов времени длительности ТШС.
В блоке 6 выполняется процедура обнаружения широкополосного эхосигнала методом временного контраста [1] на каждом из перекрывающихся интервалов времени длительности ТШС. В случае обнаружения широкополосного ЭС вычисляется разность ΔT времен его обнаружения и излучения и с использованием этой разности вычисляется расстояние до дна (глубина под килем) по формуле:

Таким образом, обеспечивается одновременное измерение скорости судна и глубины под килем и, как следствие, отслеживание рельефа дна.
Технический результат подтвержден имитационным моделированием.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги // Л.: Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н., и др. Судовые измерители скорости // Л.: Судостроение, 1978.
3. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхосигнала, основанным на использовании банка фильтров Калмана.
4. Богородский В.В. и др. Гидроакустическая техника исследования и освоения океана // Л.: Гидрометиздат, 1984, 264 с.
5. Гидроакустические навигационные средства. Под ред. В.В. Богородского // Л.: Судостроение, 1983. 262 с.
6. Виноградов К.А., Новиков И.А., Гидроакустические навигационные системы и средства // Навигация и гидрография, 1999, №7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Способ измерения скорости судна доплеровским лагом | 2018 |
|
RU2702696C1 |
| Способ измерения частоты эхосигнала в доплеровском лаге | 2017 |
|
RU2670714C9 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2655019C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2677102C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1973 |
|
SU1840743A1 |
| ГИДРОАКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ЛАГ С АЛГОРИТМОМ МНОГОАЛЬТЕРНАТИВНОЙ ФИЛЬТРАЦИИ ЭХОСИГНАЛА, ОСНОВАННЫМ НА ИСПОЛЬЗОВАНИИ БАНКА ФИЛЬТРОВ КАЛМАНА | 2010 |
|
RU2439613C1 |

Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения абсолютной скорости судна. Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна и расстояния до дна. Технический результат - повышение точности измерения доплеровским лагом расстояния до дна. Указанный технический результат достигается тем, что следом за излучением доплеровским лагом тонального зондирующего сигнала с большой длительностью излучается широкополосный зондирующий сигнал с малой длительностью. В результате по отраженному от дна тональному сигналу с высокой точностью определяется частота эхосигнала и, как следствие, скорость судна, а по отраженному от дна широкополосному сигналу с высокой точностью определяется время распространения сигнала до дна и обратно и, как следствие, расстояние до дна. 2 ил.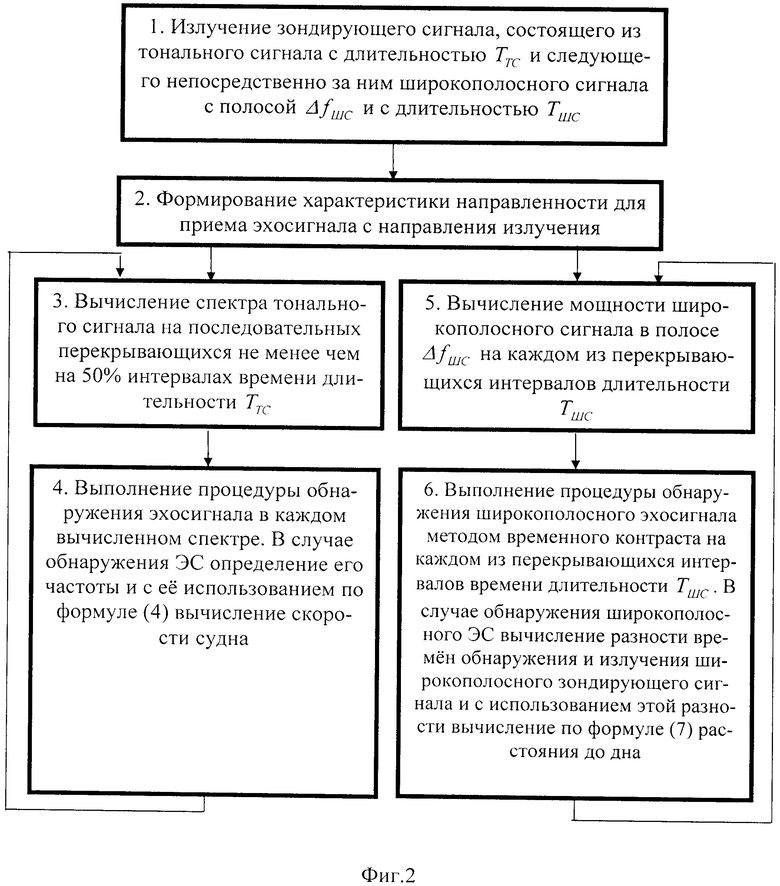
Способ измерения скорости судна доплеровским лагом, включающий излучение под наклоном ко дну тонального зондирующего сигнала с большой длительностью, формирование характеристики направленности для приема сигнала с направления излучения, обнаружение отраженного от дна эхосигнала с большой длительностью на выходе сформированной характеристики направленности, определение частоты обнаруженного эхосигнала с большой длительностью, с использованием которой вычисляют скорость судна, отличающийся тем, что при излучении вслед за тональным сигналом с большой длительностью дополнительно излучают широкополосный зондирующий сигнал с малой длительностью, при приеме эхосигнала одновременно с обнаружением тонального эхосигнала с большой длительностью на выходе сформированной характеристики направленности осуществляют обнаружение широкополосного эхосигнала с малой длительностью, определяют разность времен между моментами обнаружения и излучения широкополосного зондирующего сигнала с малой длительностью и с использованием этой разности времен вычисляют расстояние до дна.
| Способ образования вихревой воронки в верхнем бьефе гидротехнических сооружений | 1947 |
|
SU75062A1 |
| Устройство для передачи распорядительных сигналов из центрального пункта нескольким установкам | 1931 |
|
SU27863A1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| US 3603920 A1, 07.09.1971 | |||
| US 7542374 B2, 02.06.2009. | |||

