ПЕРЕКРЁСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка имеет приоритет китайской заявки на патент, поданной китайским патентным ведомством с номером заявки 201810564952.4 04 июня 2018 г., все содержание которой включено в настоящую заявку в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящая заявка относится к технологии спутниковой навигации и, например, относится к способу позиционирования и устройству позиционирования высокой точности – кинематики в реальном времени (PPP-RTK).
УРОВЕНЬ ТЕХНИКИ
[0003] Требование относительного длительного времени (более 30 минут) для инициализации и повторной инициализации после прерывания для позиционирования высокой точности (PPP) навигационного спутника является основным фактором, который ограничивает применение этой технологии в области высокой динамической точности быстрой и в реальном времени. Чтобы сократить время для инициализации и улучшать точность позиционирования, в последние годы была предложена и разработана технология фиксации целочисленной неоднозначности, в которой коррекция смещения дробной фазы спутника решается и публикуется в реальном времени с помощью глобальной сети мониторинга, и целочисленные характеристики не дифференцированной однозначности восстанавливаются пользователем путём применения числа коррекции смещения так, чтобы выполнять фиксацию целочисленной неоднозначности путём использования соответствующих отработанных технологий. Исследования показали, что время для инициализации PPP может быть сокращено до около 20 минут путём использования технологии решения фиксации целочисленной неоднозначности.
[0004] Для того, чтобы уменьшать влияние ошибки атмосферной задержки на инициализацию, некоторые учёные также предложили способ позиционирования PPP, который учитывает ограничения атмосферной задержки. Если величина задержки, генерируемая моделью ионосферы, используется в качестве информации ограничения наблюдения для улучшения осуществления решения, время для инициализации может дополнительно быть сокращено до 15 минут. Однако по-прежнему сложно удовлетворять требованиям высокоточного позиционирования в реальном времени. Для того, чтобы уменьшать время сходимости, в настоящее время соответствующие ошибки на мобильных станциях корректируются в основном таким образом, что недифференцированная комплексная информация коррекции передаётся наземной системой дифференциальной коррекции так, чтобы достигать быстрого разделения параметра неоднозначности и параметра положения, что может фиксировать параметр неоднозначности в течение нескольких периодов дискретизации, но имеет высокое требование к плотности станций наземной сети мониторинга и, таким образом, часто подходит для малодинамичных пользователей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Настоящая заявка предлагает способ позиционирования и устройство позиционирования высокой точности – кинематики в реальном времени (PPP-RTK), в котором быстродвижущиеся характеристики спутников на низкой околоземной орбите (LEO) (далее называемые как LEO-спутники) используются для передачи навигационных сигналов, и в то же время множество систем используется для увеличения числа наблюдений навигационного спутника, тем самым комплексно улучшая геометрические конфигурации пространства наблюдения пользователя, и в регионе с наземной системой дифференциальной коррекции и мониторинга ошибки наблюдения пользователя корректируются путём использования региональной комплексной информации об ошибках, тем самым уменьшая время для инициализации точного позиционирования для пользователей и реализуя плавное переключение услуг PPP и динамики в реальном времени (кинематики в реальном времени, RTK) на основе системы дифференциальной коррекции навигации LEO-группировки посредством единой модели.
[0006] Способ позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки, предложенной настоящей заявкой, включает в себя этап S11, этап S12 и этап S13 (или этап S13’).
[0007] На этапе S11 определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой.
[0008] На этапе S12 принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника.
[0009] На этапе S13 выполняют позиционирование высокой точности путём использования информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения.
[0010] На этапе S13’, когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией путём использования информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции.
[0011] В варианте осуществления этап, на котором определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой, включает в себя этап, на котором: отслеживают прямой сигнал и определяют промежуток времени для отслеживания, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; измеряют прямой сигнал для определения исходных данных наблюдения, когда промежуток времени для отслеживания больше, чем заранее установленный промежуток времени.
[0012] В варианте осуществления навигационный спутник содержит, по меньшей мере, одно из следующего: глобальная система позиционирования (GPS) США, Beidou, Китай, Galileo, ЕС и российская глобальная навигационная спутниковая система (ГЛОНАСС).
[0013] В варианте осуществления информация дифференциальной коррекции навигационного спутника включает в себя, по меньшей мере, одно из следующего: точная орбита и сдвиг часов навигационного спутника, коррекция смещения дробной фазы навигационного спутника, коррекция смещения дробной фазы LEO-спутника и информация параметров модели ионосферы.
[0014] В варианте осуществления исходные данные наблюдения содержат, по меньшей мере, одно из следующего: данные наблюдения псевдодальности навигационного спутника и LEO-спутника, данные наблюдения фазы несущей навигационного спутника и LEO-спутника и доплеровские данные наблюдения навигационного спутника и LEO-спутника.
В варианте осуществления режим обработки для позиционирования высокой точности содержит, по меньшей мере, одно из следующего: режим плавающего решения неоднозначности LEO-спутника с дифференциальной коррекцией и режим фиксированного решения неоднозначности LEO-спутника с дифференциальной коррекцией.
[0015] В варианте осуществления комплексная информация коррекции ошибок наземной дифференциальной коррекции содержит, по меньшей мере, одно из следующего: недифференцированную комплексную ошибку наблюдения псевдодальности и недифференцированную комплексную ошибку наблюдения фазы несущей.
Вариант осуществления настоящей заявки предлагает устройство, включающее в себя:
по меньшей мере, один процессор; и
память находящейся в связи с по меньшей мере одним процессором;
[0016] причем в памяти хранятся инструкции, исполняемые, по меньшей мере, одним процессором, которые исполняют способ, описанный в любом из пунктов выше, когда инструкции исполняются, по меньшей мере, одним процессором.
[0017] Вариант осуществления настоящей заявки предлагает считываемый компьютером носитель для хранения, причём носитель для хранения включает в себя программу, сохранённую в нем, которая при запуске исполняет способ позиционирования высокой точности - кинематики в реальном времени, описанный в любом из пунктов выше, когда программа запущена.
[0018] Вариант осуществления настоящей заявки предлагает процессор, который выполнен с возможностью запуска программы, причём программа сделана (составлена) с возможностью исполнения способа позиционирования высокой точности - кинематики в реальном времени, описанного в любом из пунктов выше, в процессоре.
[0019] В способе позиционирования PPP-RTK на основе системе дифференциальной коррекции навигации LEO-группировки, предложенной в настоящей заявке, может быть выполнено плавное переключение между регионом с наземной системой дифференциальной коррекции и мониторинга и остальными регионами мира, и разрешение выполняется путём использования единого режима позиционирования высокой точности. Инициализация в реальном времени, даже инициализация одного периода дискредитации, реализуется в регионе с наземной системой дифференциальной коррекции и мониторинга с точностью позиционирования порядка сантиметра, а инициализация почти в реальном времени реализуется в остальных регионах мира с точностью позиционирования порядка дециметра, даже порядка сантиметра.
[0020] В способе позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки, обеспеченном настоящей заявкой, результаты точного позиционирования почти в реальном времени, измерения скорости и синхронизации могут быть получены по всему миру, результаты позиционирования в реальном времени, измерения скорости и синхронизации порядка сантиметра могут быть получены в регионе с наземной дифференциальной коррекцией, и может быть выполнено плавное переключение между регионом с наземной дифференциальной коррекцией и остальным регионом мира без наземной дифференциальной коррекции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] При прочтении ниже подробного описания предпочтительных вариантов осуществления различные другие преимущества и выгоды станут ясны специалистам в данной области техники. Приложенные чертежи представлены только с целью иллюстрации предпочтительных вариантов осуществления и не рассматриваются как ограничения настоящей заявки. На всех чертежах одинаковые ссылочные символы используются для обозначения одинаковых компонентов. На чертежах:
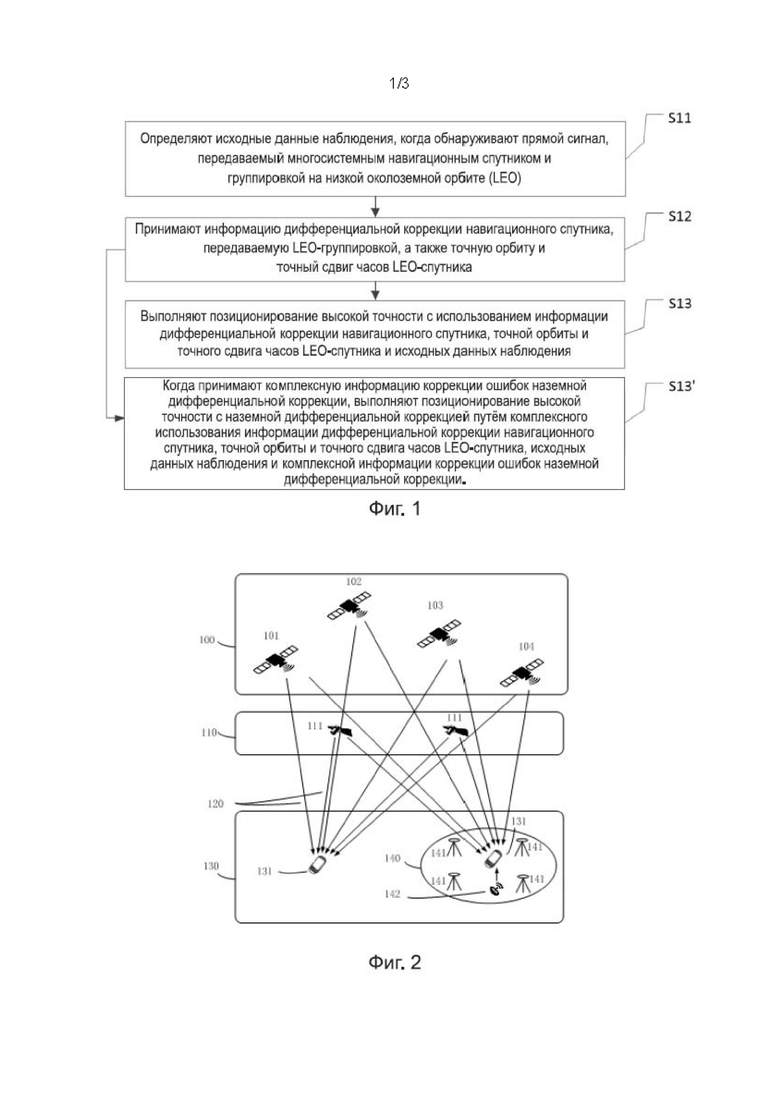
[0022] фиг. 1 показывает блок-схему последовательности операций способа позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки варианта осуществления настоящей заявки,
[0023] фиг. 2 показывает схематическое изображение принципа реализации способа позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки варианта осуществления настоящей заявки,
[0024] фиг. 3 показывает конкретную блок-схему последовательности операций способа позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки другого варианта осуществления настоящей заявки,
[0025] фиг. 4 показывает структурную блок-схему устройства по предлагаемому варианту осуществления настоящей заявки.
Описание символов для основных компонентов
100 – навигационная группировка
101 – навигационный спутник Beidou
102 – навигационный спутник GPS
103 – навигационный спутник ГЛОНАСС
104 – спутники других навигационных систем
110 – группировка дифференциальной LEO коррекции
111 – LEO-спутник
120 – навигационные сигналы, включающие в себя навигационный сигнал навигационного спутника и навигационный сигнал LEO-спутника
130 – глобальные регионы
131 – навигационное устройство, использующее способ позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки
140 – регион с наземной дифференциальной коррекцией
141 – наземная станция дифференциальной коррекции и мониторинга
142 – наземное устройство передачи информации дифференциальной коррекции
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0026] Ниже примеры вариантов осуществления настоящей заявки будут описаны более подробно со ссылкой на сопроводительные чертежи. Несмотря на то, что чертежи показывают примеры вариантов осуществления настоящего раскрытия, необходимо понимать, что настоящая заявка может быть осуществлена в различных формах и не должна быть ограничена вариантами осуществления, изложенными здесь. Наоборот, эти варианты осуществления представлены для более полного понимания настоящего раскрытия и полной передачи объёма настоящей заявки специалистам в данной области техники.
[0027] Фиг. 1 показывает блок-схему последовательности операций способа позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки варианта осуществления настоящей заявки. Со ссылкой на фиг. 1 способ позиционирования PPP-RTK на основе системы дифференциальной коррекции навигации LEO-группировки, представленный вариантом осуществления настоящей заявки, включает в себя этап S11, этап S12 и этап S13 (или этап S13'), которые следуют далее.
[0028] На этапе S11 определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой.
[0029] На этапе S12 принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника.
[0030] На этапе S13 выполняют позиционирование высокой точности, используя информацию дифференциальной коррекции навигационного спутника, точную орбиту и точный сдвиг часов LEO-спутника и исходные данные наблюдения.
[0031] На этапе S13’, когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией, используя информацию дифференциальной коррекции навигационного спутника, точную орбиту и точный сдвиг часов LEO-спутника, исходные данные наблюдения и комплексную информацию коррекции ошибок наземной дифференциальной коррекции.
[0032] В способе позиционирования PPP-RTK, раскрытом в варианте осуществления настоящей заявки, быстродвижущиеся характеристики LEO-спутника используют для передачи навигационных сигналов и в то же время множество систем используют для увеличения числа наблюдений навигационного спутника так, что геометрические конфигурации пространства наблюдения пользователя комплексно улучшаются, и инициализация почти в реальном времени может быть выполнена по всему миру.
[0033] В варианте осуществления в регионе с наземной сетью дифференциальной коррекции и мониторинга плотность станций наземной сети дифференциальной коррекции и мониторинга эффективно уменьшается с помощью этого способа, и путем коррекции ошибок наблюдения пользователя путём приёма комплексной информации об ошибках от ионосферы, тропосферы и т.п. в текущем регионе инициализация в реальном времени может быть реализована с единым режимом вычисления и обработки PPP.
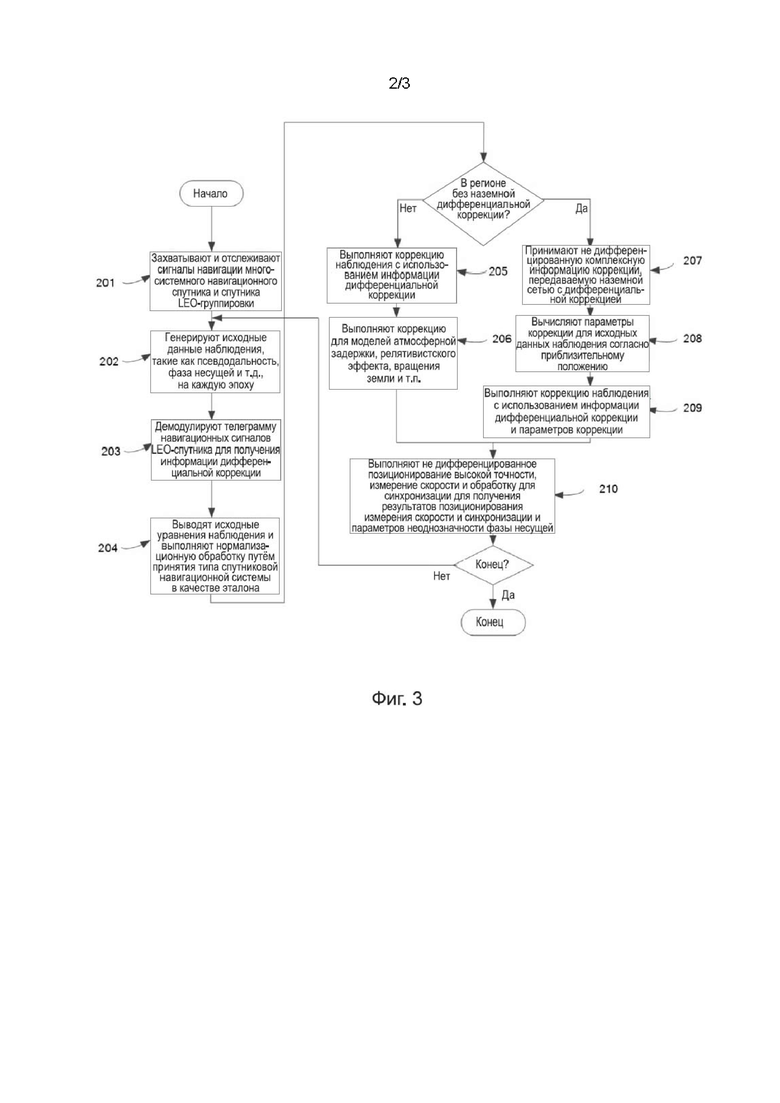
[0034] Фиг. 2 показывает схематическое изображение принципа реализации способа позиционирования PPP-RTK варианта осуществления настоящей заявки. Его процедура обработки является такой, как показано на фиг. 3, которая включает в себя этап 201 - этап 210.
[0035] На этапе 201 принимают прямые сигналы навигации, передаваемые многосистемным навигационным спутником и LEO-группировкой, и захватывают и отслеживают прямые сигналы.
[0036] На этапе 202 измеряют прямые сигналы навигации на каждый период дискретизации для генерации данных наблюдения псевдодальности, данных наблюдения фазы несущей и доплеровских данных наблюдения.
[0037] На этапе 203 при условии стабильного отслеживания сигналов демодулируют параметры телеграмм прямых сигналов LEO-спутника и получают информацию дифференциальной коррекции навигационного спутника и точную орбиту и сдвиг часов LEO-спутника, причём информация дифференциальной коррекции навигационного спутника включает в себя точную орбиту, сдвиг часов, смещение дробной фазы навигационного спутника и параметры глобальной модели ионосферы.
[0038] То есть определение исходных данных наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой, включает в себя этап, на котором: отслеживают прямой сигнал и определяют промежуток времени для отслеживания, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; измеряют прямой сигнал для определения исходных данных наблюдения, когда промежуток времени для отслеживания больше, чем заранее установленный промежуток времени.
[0039] На этапе 204 выводят уравнения наблюдения, используя исходные данные наблюдения и путем принятия одного вида спутниковой навигационной системы в качестве эталона, выполняют нормализационную обработку данных наблюдения от других спутниковых навигационных систем и спутников LEO для получения уравнений наблюдения с единым эталоном времени.
[0040] На этапе 206, если в регионе без наземной дифференциальной коррекции, наблюдение корректируют, используя информацию дифференциальной коррекции навигационного спутника и точную орбиту и сдвиг часов LEO-спутника.
[0041] На этапе 207, если в регионе с наземной дифференциальной коррекцией, принимают по линии связи недифференцированную комплексную информацию коррекции, передаваемую наземной сетью мониторинга.
[0042] На этапе 208 вычисляют параметры коррекции ошибок приблизительного положения пользователя относительно каждого навигационного спутника и LEO-спутника согласно принятой недифференцированной комплексной информации коррекции.
[0043] На этапе 209 корректируют данные наблюдения, используя информацию дифференциальной коррекции навигационного спутника и точную орбиту и сдвиг часов LEO-спутника и вычисленные выше параметры коррекции ошибок.
[0044] На этапе 210 выполняют обработку позиционирования, используя режим позиционирования высокой точности для получения результатов позиционирования PPP-RTK, синхронизацию и измерения скорости и параметров неоднозначности фазы несущей и т.п. на основе системы дифференциальной коррекции навигации LEO-группировки.
[0045] В способе позиционирования PPP-RTK, предложенном настоящей заявкой, быстродвижущиеся характеристики LEO-спутников используют для передачи навигационных сигналов и в то же время множество систем используют для увеличения числа наблюдений навигационного спутника так, что геометрические конфигурации пространства наблюдения пользователя комплексно улучшаются, и результаты точного позиционирования почти в реальном времени, измерения скорости и синхронизации могут быть получены по всему миру; результаты позиционирования в реальном времени порядка сантиметра, измерения скорости и синхронизации могут быть получены в регионе с наземной дифференциальной коррекцией, и может быть выполнено плавное переключение между регионом с наземной дифференциальной коррекцией и остальным регионом мира без наземной дифференциальной коррекции.
[0046] Техническое решение по настоящей заявке будет описано подробно ниже посредством конкретного варианта осуществления.
[0047] Основная процедура быстрой обработки PPP в глобальном регионе на основе системы дифференциальной коррекции навигации LEO-группировки LEO выглядит следующим образом.
(1) Выведение уравнений наблюдения, используя исходные данные наблюдения.
[0048] Исходные данные наблюдения, сгенерированные на основе навигационных сигналов, принятых приёмником, включают в себя данные наблюдения псевдодальности, данные наблюдения фазы несущей и доплеровские данные наблюдения множества группировок и множества точек частоты, причём уравнения наблюдения для псевдодальности и фазы несущей могут быть записаны следующим образом:

где
G – обозначает спутниковую навигационную систему и систему дифференциальной коррекции LEO;
i – обозначает идентификацию частоты сигнала, i = 1,2,3;
r, S – соответственно обозначает идентификацию приемника и спутника;
 – соответственно обозначает значения наблюдения псевдодальности и фазы несущей в метрах;
– соответственно обозначает значения наблюдения псевдодальности и фазы несущей в метрах;
 – геометрическое расстояние от спутника до приёмника;
– геометрическое расстояние от спутника до приёмника;
 – соответственно сдвиг часов приёмника и спутника;
– соответственно сдвиг часов приёмника и спутника;
 – тропосферная задержка;
– тропосферная задержка;
 – ионосферная задержка на частоте 1;
– ионосферная задержка на частоте 1;
 – соответственно задержки аппаратного канала псевдодальности приёмника и спутника;
– соответственно задержки аппаратного канала псевдодальности приёмника и спутника;
 – целочисленная неоднозначность;
– целочисленная неоднозначность;
 – соответственно задержка канала фазы несущей и начальный сдвиг фазы приемника;
– соответственно задержка канала фазы несущей и начальный сдвиг фазы приемника;
 – соответственно задержка канала фазы несущей и начальный сдвиг фазы спутника;
– соответственно задержка канала фазы несущей и начальный сдвиг фазы спутника;
 – соответственно несмоделированные остаточные ошибки в наблюдениях псевдодальности и фазы несущей.
– соответственно несмоделированные остаточные ошибки в наблюдениях псевдодальности и фазы несущей.
[0049] Поскольку задержка канала фазы несущей и начальный сдвиг фазы не могут быть разделены, они обычно объединяются и называются некалиброванной аппаратной задержкой и со сторон приёмника и спутника соответственно записываются как:

И уравнение наблюдения для фазы несущей может быть записано как:

(2) Построение значения наблюдения комбинации без ионосферы
[0050] Наблюдения комбинации без ионосферы строятся, используя двухчастотные данные наблюдения для исключения влияния ионосферной задержки первого порядка и уменьшения неизвестных параметров, и конкретная комбинированная модель представляет собой:

где
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
[0051] Поскольку аппаратная задержка псевдодальности со стороны приёмника будет скомпенсирована сдвигом часов приёмника, предположим, что
и уравнение выше становится
 (8)
(8)
 (9)
(9)
[0052] Когда данные наблюдения множества систем обрабатываются в комбинации, задержка канала псевдодальности со стороны приёмника компенсируется параметром сдвига часов приёмника и задержка канала зависит от сигналов, что в связи с этим приводит к тому, что разные системы соответствуют разным сдвигам часов приёмника, и тогда уравнения наблюдения, соответствующие LEO-спутнику и другим спутниковым навигационным системам, может быть переписано в виде:
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
где  – сдвиг часов приёмника, соответствующее LEO-спутнику, а
– сдвиг часов приёмника, соответствующее LEO-спутнику, а  – сдвиг часов приёмника, соответствующее соответственным навигационным системам. Технология множественного доступа с частотным разделением используется в ГЛОНАСС, задержки канала псевдодальности приёмника, сгенерированные сигналами спутника разных частот, различаются, что приводит к не полной компенсации сдвига часов приёмника. Однако, если меньшие веса присваиваются значениям наблюдения псевдодальности ГЛОНАСС, эти различия задержек канала могут приблизительно рассматриваться как включённые в остаточные ошибки. В связи с этим эти переменные больше не отражаются в модели наблюдения.
– сдвиг часов приёмника, соответствующее соответственным навигационным системам. Технология множественного доступа с частотным разделением используется в ГЛОНАСС, задержки канала псевдодальности приёмника, сгенерированные сигналами спутника разных частот, различаются, что приводит к не полной компенсации сдвига часов приёмника. Однако, если меньшие веса присваиваются значениям наблюдения псевдодальности ГЛОНАСС, эти различия задержек канала могут приблизительно рассматриваться как включённые в остаточные ошибки. В связи с этим эти переменные больше не отражаются в модели наблюдения.
(3) Выполнение коррекции ошибок с использованием информации дифференциальной коррекции навигационного спутника, передаваемой LEO-спутниками, и модели.
[0053] В информации дифференциальной коррекции, передаваемой LEO-спутниками, единый эталон пространственных координат используется во всех видах точной орбиты спутника, а единый эталон времени используется в средствах точного сдвига часов спутника. В связи с этим отсутствует проблема несовместимого эталона координат или эталона времени в модели наблюдения. В то же время средства точного сдвига часов спутника генерируются с использованием наблюдаемого значения комбинаций без ионосферы, которые включают в себя задержку канала псевдодальности со стороны спутника.
[0054] В дополнение, тропосферная задержка может обычно быть разделена на две части: сухой компонент и влажный компонент. Сухой компонент может быть скорректирован с помощью модели, а влажный компонент оценивается как параметры, подлежащие оценке. Для того, чтобы уменьшать число параметров, подлежащих оценке, функция отображения может быть использована для проецирования наклонной задержки в направлении зенита, и оценивается только одна влажная задержка в зените. Предположим, что
 (14)
(14)
[0055] Используя имеющуюся информацию дифференциальной коррекции навигационного спутника, а также модели, таких как релятивистский эффект, вращение земли и фазовый центр антенны, для коррекции уравнений наблюдения для исключения части неизвестных параметров и для игнорирования остаточных ошибок орбит спутников и сдвига часов соответствующие уравнения наблюдения LEO-спутника и других спутниковых навигационных систем принимают вид:
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
где  – соответственно функции отображения, соответствующие LEO-спутнику и другим спутниковым навигационным системам, а Zr – тропосферная влажная задержка в зените.
– соответственно функции отображения, соответствующие LEO-спутнику и другим спутниковым навигационным системам, а Zr – тропосферная влажная задержка в зените.
(4) Линеаризация уравнений наблюдения
[0056] Путём осуществления разложения в ряд Тейлора в приблизительном положении приёмника и отбрасывания членов второго порядка получаются следующие уравнения наблюдения:
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
где
 - координаты LEO-спутника и точная орбита навигационного спутника, а
- координаты LEO-спутника и точная орбита навигационного спутника, а  - приблизительное положение приемника. И тогда уравнения наблюдения могут быть сокращены до:
- приблизительное положение приемника. И тогда уравнения наблюдения могут быть сокращены до:

где V – остаточная ошибка наблюдения, A – матрица коэффициентов, ΔX – неизвестный вектор, включающий в себя коррекцию координат приёмника, сдвиг часов приёмника, тропосферную влажную задержку в зените, неоднозначность фазы несущей, L - вектор вычисления.
(5) Выполнение оценки параметров и обработки фиксации неоднозначности.
[0057] Фильтрация Калмана используется для комплексной обработки PPP. В фильтрации необходимо обеспечивать подходящую случайную модель значений наблюдения и динамическую модель вектора состояния. Случайная модель описывает статистические характеристики значений наблюдения и обычно представлена дисперсионно-ковариационной матрицей значений наблюдения. Может быть известно из уравнений наблюдения, что значения наблюдения комбинации без ионосферы представляют собой линейную комбинацию исходных значений наблюдения. При условии, что значения наблюдения на разных частотах не коррелированы, начальная дисперсия значений наблюдения комбинации без ионосферы может быть вычислена по закону распространения ошибок. Конкретная дисперсия может быть определена как функция от начальной дисперсии и угла высоты спутника. При условии, что значения наблюдения разных спутников и разных систем не коррелированы и что значения наблюдения разных типов, то есть значения наблюдения псевдодальности и фазы, не коррелированы, может быть получена дисперсионно-ковариационная матрица значений наблюдения.
[0058] Для динамической модели вектора состояния, статические координаты приёмника могут быть представлены в виде постоянных, а динамические координаты приёмника и сдвига часов приёмника могут быть представлены в виде случайных отклонений или процессов Гаусса-Маркова первого порядка, и тропосферная влажная задержка в зените может быть представлена в виде процессов случайных отклонений, параметр неоднозначности фазы несущей может быть представлен в виде постоянной, и тогда получается уравнение состояния:

где X – параметр, такой как коррекция координат приёмника, подлежащий оценке, сдвиг часов приёмника и т.п., Φ – матрица изменения состояния, а Wk-1 – шум изменения состояния. Путём интеграции уравнений наблюдений и уравнения состояния стандартный процесс фильтрации Калмана может быть использован для оценки параметров. Здесь, так как коррекция смещения дробной фазы спутника не выполняется, получается только результат плавающего решения неоднозначности фазы несущей. Если смещение дробной фазы спутника, содержащееся в информации дифференциальной коррекции LEO-спутника, дополнительно используется для коррекции уравнений наблюдения, может быть восстановлена целочисленная характеристика неоднозначности, может быть реализована фиксация неоднозначности и может быть получен результат фиксированного решения неоднозначности фазы несущей, что дополнительно сокращает время для инициализации и улучшает точность позиционирования, измерения скорости и синхронизации.
[0059] За счёт добавления данных наблюдения прямых сигналов навигации LEO-группировки геометрия наблюдения для пользователя значительно улучшается с помощью быстродвижущихся характеристик низкоорбитальных спутников, тем самым значительно уменьшая время для инициализации PPP.
[0060] Основная процедура обработки PPP-RTK с дифференциальной коррекцией на основе навигации LEO-группировки в регионе с наземной дифференциальной коррекцией представляет собой следующее.
[0061] В регионе с наземной дифференциальной коррекцией все эталонные станции будут разделены на несколько треугольных подсетей с использованием способа Делоне, и комплексная информация коррекции ошибок каждого видимого спутника будет построена для каждой подсети согласно способу RTK сети на основе недифференцированных чисел коррекции соответственно, в которую включена ионосфера и тропосфера в направлении каждого спутника и связанные со спутником задержки канала, сдвига часов спутника и ошибки орбиты спутника, которые представлены в виде:
 (25)
(25)
 (26)
(26)
 ,
,  соответственно обозначают комплексную информацию коррекции ошибок псевдодальности и фазы несущей.
соответственно обозначают комплексную информацию коррекции ошибок псевдодальности и фазы несущей.
[0062] Моделирование подгонки плоскости выполняется приёмником на основе комплексной информации коррекции ошибок по меньшей мере 3 наземных станций дифференциальной коррекции на периферии согласно приблизительному положению, и значения наблюдения псевдодальности и фазы несущей пользователя уточняются с использованием локальной информации коррекции ошибок, полученной путём интерполяции. После коррекции соответствующие уравнения наблюдения LEO-спутников и других спутниковых навигационных систем могут быть записаны в виде:
 , (27)
, (27)
 , (28)
, (28)
 , (30)
, (30)
 . (30)
. (30)
[0063] Неизвестные переменные в уравнениях в это время включают в себя координаты положения приёмника, сдвига часов приёмника, задержки канала приёмника и параметры неоднозначности фазы несущей сдвига часов приёмника и задержки канала могут быть дополнительно исключены путём использования одного различия между спутниками. И затем могут быть выполнены оценка положения приёмника и фиксация неоднозначности фазы несущей путём использования стратегии обработки линеаризации и способа оценки параметра, представленного выше.
[0064] За счёт добавления данных наблюдения прямых сигналов навигации LEO-группировки геометрия наблюдения для пользователя значительно улучшается с помощью быстродвижущихся характеристик LEO-спутников так, что при таких же требованиях к времени инициализации и точности позиционирования плотность станций наземной сети мониторинга с дифференциальной коррекцией может быть значительно уменьшена, тем самым уменьшая стоимость строительства сети мониторинга.
[0065] Быстрое измерение скорости LEO-группировки с дифференциальной коррекцией, процесс вычисления синхронизации для глобального региона и региона с наземной дифференциальной коррекцией аналогичны процессу позиционирования и не будут повторяться здесь.
[0066] В способе позиционирования PPP-RTK, предлагаемого вариантом осуществления настоящей заявки, прямые сигналы навигации передаются через LEO-спутники, геометрические конфигурации пространства наблюдения пользователя комплексно улучшаются путём использования быстродвижущихся характеристик спутников, а время для инициализации PPP пользователя может быть сокращено до квазиреального времени. В регионе с наземной дифференциальной коррекцией время для инициализации дополнительно сокращается до реального времени путём коррекции ошибок наблюдения пользователя с дополнительным приёмом комплексной информации об ошибках текущего региона и принятия режима обработки вычисления, единого с PPP. Посредством этого способа может быть эффективно уменьшена плотность станций наземной сети мониторинга с дифференциальной коррекцией и может быть реализовано плавное переключение многосистемных услуг PPP и RTK с дифференциальной коррекцией с помощью LEO-группировки посредством единой модели.
[0067] Фиг. 4 представляет структурную блок-схему устройства, предлагаемого настоящим вариантом осуществления. Устройство, предложенное настоящим вариантом осуществления, может включать в себя процессор 401 и память 403 и также может включать в себя интерфейс 402 связи и шину 404. Причём процессор 401, интерфейс 402 связи и память 403 могут связываться друг с другом по шине 404. Интерфейс 402 связи может быть использован для передачи информации. Процессор 801 может вызывать логические инструкции в памяти 403 для исполнения способа позиционирования c позиционированием высокой точности – кинематики в реальном времени PPP-RTK вышеупомянутого варианта осуществления, включающего в себя этапы, на которых: определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника; выполняют позиционирование высокой точности с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения; или, когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции.
[0068] Вариант осуществления настоящей заявки также предлагает носитель для хранения, который включает в себя сохранённую программу, в которой способ, предложенный вышеупомянутым вариантом осуществления, исполняется, когда программа запущена, и способ включает в себя этапы, на которых:
[0069] определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника; выполняют позиционирование высокой точности с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения; или, когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции.
[0070] Настоящая заявка также предлагает процессор, который выполнен с возможностью запуска программы, причём программа составлена с возможностью исполнения способа, предложенного вышеупомянутым вариантом осуществления, в процессоре, и способ включает в себя этапы, на которых:
[0071] определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника; выполняют позиционирование высокой точности с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения; или, когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции.
[0072] Посредством вышеприведенного описания вариантов осуществления специалисты в данной области техники могут ясно понимать, что может быть осуществлено множество вариантов исполнения посредством программного обеспечения плюс необходимой общей аппаратной платформы, и, разумеется, оно также могут быть осуществлено посредством аппаратного обеспечения. На основе такого понимания вышеприведенное техническое решение по существу или часть вышеприведенного технического решения, которая содействует связанной технологии, может быть выполнена в форме программного продукта. Компьютерный программный продукт может храниться в считываемом компьютером носителе для хранения, таком как память только для чтения (ROM)/память с произвольным доступом (RAM), магнитные диски, оптические дисков и т.д., включающем в себя некоторые инструкции для того, чтобы компьютерное устройство (которое может представлять собой персональный компьютер, сервер или сетевое устройство и т.д.) исполняло множество вариантов осуществления или способов, описанных в некоторых частях вариантов осуществления.
[0073] В дополнение, специалисты в данной области техники могут понимать, что, несмотря на то, что некоторые варианты осуществления здесь включают в себя определённые признаки, включённые в другие варианты осуществления, но не другие признаки, сочетание признаков разных вариантов осуществления означает, что они находятся в пределах объёма настоящей заявки и образуют разные варианты осуществления. Например, в нижеследующей формуле изобретения любой из заявленных вариантов осуществления может быть использован в любой комбинации.

Изобретение относится к спутниковой навигации. Технический результат состоит в повышении точности позиционирования. Для этого определяют исходные данные наблюдения при обнаружении прямого сигнала, передаваемого многосистемным навигационным спутником и LEO-группировкой; принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника; выполняют позиционирование высокой точности с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения или выполняют позиционирование высокой точности с наземной дифференциальной коррекцией с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции при приёме комплексной информации коррекции ошибок наземной дифференциальной коррекции. 4 н. и 5 з.п. ф-лы, 4 ил.
1. Способ позиционирования с позиционированием высокой точности - кинематики в реальном времени PPP-RTK, включающий в себя этапы, на которых:
определяют исходные данные наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и группировкой на низкой околоземной орбите (LEO),
принимают информацию дифференциальной коррекции навигационного спутника, передаваемую LEO-группировкой, а также точную орбиту и точный сдвиг часов LEO-спутника,
выполняют позиционирование высокой точности с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника и исходных данных наблюдения, или
когда принимают комплексную информацию коррекции ошибок наземной дифференциальной коррекции, выполняют позиционирование высокой точности с наземной дифференциальной коррекцией с использованием информации дифференциальной коррекции навигационного спутника, точной орбиты и точного сдвига часов LEO-спутника, исходных данных наблюдения и комплексной информации коррекции ошибок наземной дифференциальной коррекции, при этом
информация дифференциальной коррекции навигационного спутника содержит по меньшей мере одно из следующего: точная орбита и сдвиг часов навигационного спутника, коррекция смещения дробной фазы навигационного спутника, коррекция смещения дробной фазы LEO-спутника и информация параметров модели ионосферы.
2. Способ по п. 1, в котором определение исходных данных наблюдения, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и группировкой на низкой околоземной орбите (LEO), содержит этапы, на которых:
отслеживают прямой сигнал и определяют промежуток времени для отслеживания, когда обнаруживают прямой сигнал, передаваемый многосистемным навигационным спутником и LEO-группировкой; и
измеряют прямой сигнал для определения исходных данных наблюдения, когда промежуток времени для отслеживания больше, чем заранее установленный промежуток времени.
3. Способ по п. 1, в котором многосистемный навигационный спутник содержит по меньшей мере одно из следующего: глобальная система позиционирования GPS, США, Beidou, Китай, Galileo, ЕС, российская глобальная навигационная спутниковая система ГЛОНАСС.
4. Способ по п. 1 или 2, в котором исходные данные наблюдения содержат по меньшей мере одно из следующего: данные наблюдения псевдодальности навигационного спутника и LEO-спутника, данные наблюдения фазы несущей навигационного спутника и LEO-спутника и доплеровские данные наблюдения навигационного спутника и LEO-спутника.
5. Способ по п. 1, в котором режим обработки для позиционирования высокой точности содержит по меньшей мере одно из следующего: режим плавающего решения неоднозначности LEO-спутника с дифференциальной коррекцией и режим фиксированного решения неоднозначности LEO-спутника с дифференциальной коррекцией.
6. Способ по п. 1, в котором комплексная информация коррекции ошибок наземной дифференциальной коррекции содержит по меньшей мере одно из следующего: недифференцированную комплексную ошибку наблюдения псевдодальности и недифференцированную комплексную ошибку наблюдения фазы несущей.
7. Устройство позиционирования с позиционированием высокой точности - кинематики в реальном времени PPP-RTK, содержащее
по меньшей мере один процессор и
память, находящуюся в связи с по меньшей мере одним процессором,
причём память хранит исполняемые инструкции, которые при исполнении заставляют по меньшей мере один процессор осуществлять способ, заявленный по любому одному из пп. 1-6.
8. Считываемый компьютером носитель для хранения, причём носитель для хранения содержит программу, сохранённую на нем, которая при запуске исполняет способ, заявленный по любому одному из пп. 1-6.
9. Процессор, который выполнен с возможностью запуска программы, причём программа выполнена с возможностью исполнения способа, заявленного по любому одному из пп. 1-6.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ интеграции систем и/или средств обеспечения навигационной и мониторинговой информацией и аппаратно-программный комплекс - центр компетенций | 2017 |
|
RU2654237C1 |
| US 5944770 A, 31.08.1999 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262716C2 |
| US 6166678 A, 26.12.2000. | |||

