Область техники изобретения
Изобретение имеет отношение к способу и устройству для навигации с использованием переданных спутником радиосигналов и служебных данных, обеспеченных поставщиком услуг.
Изобретение применимо, хотя и не исключительно, к области глобальной независимой от позиции навигации, предпочтительно основанной на измерениях фазы несущей.
Уровень техники
В области спутниковой навигации позиция объекта, который может являться стационарным объектом или движущимся объектом, определяется с использованием радиосигналов, передаваемых спутниками, вращающимися вокруг Земли. В случае движущегося объекта этим способом также может быть получена информация, имеющая отношение к перемещению объекта, например, его направление и скорость. Обычно в области спутниковой навигации объект упоминается как "ровер", или также "пользователь". Без намеренного ограничения далее при описании настоящего изобретения он будет упоминаться как "ровер" или "пользователь".
Имеются различные известные в области техники методы для определения позиции ровера с использованием передаваемых спутником радиосигналов. Все эти методы требуют знания мгновенной позиции нескольких спутников, вращающихся вокруг Земли (причем спутники также могут являться геостационарными спутниками), и знания высокоточных часов, установленных на борту этих спутников. Переданные спутником радиосигналы содержат информацию с меткой времени, которая передается посредством наложения псевдослучайного сигнала на несущие частоты сигналов. При приеме из информации с меткой времени определяются так называемые наблюдения кода или наблюдения псевдодальности. На основе известных позиций спутников, времени передачи сигналов и времени приема сигналов в ровере могут быть определены координаты ровера относительно спутников посредством триангуляции.
Кроме описанной выше информации с меткой времени, которая наложена на несущую частоту, для определения позиции ровера также может использоваться фаза несущей. Основанные на фазах сигналов несущей так называемые наблюдения фазы могут быть получены и использованы при определении позиции ровера, как будет описано ниже.
Широко используемой спутниковой навигационной системой является "Система глобального позиционирования", или "GPS". Спутники GPS передают сигналы на два частотных диапазона, обычно называемые L1 с несущей частотой 1,575 ГГц и L2 с несущей частотой 1,227 ГГц. Таким образом, GPS упоминается как система "с двойной частотой". Будущими спутниковыми навигационными системами являются система "Galileo" и система "модернизированная GPS", которые обеспечат передачу спутников в трех диапазонах частот. Далее эти (и сопоставимые) системы будут в общем называться "глобальными навигационными спутниковыми системами", или "GNSS".
Известным методом определения позиции ровера с использованием сигналов трех разных несущих частот является метод "глобальная кинематика в реальном времени", или "WARTK", как описано в патенте США 2006/0164297 A1. Согласно методу WARTK ровер должен находиться в контакте с сетью фиксированных опорных станций, также принимающих передаваемые спутником сигналы. При этом нахождение в контакте с сетью опорных станций подразумевается таким, что ровер принимает данные, имеющие отношение к радиосигналам, принятым в одной или более опорных станциях сети от сети через наземное или космическое средство связи. И ровер, и опорные станции получают наблюдения псевдодальности и наблюдения фазы несущей из переданных спутником сигналов, и сеть обеспечивает роверу наблюдения псевдодальности и наблюдения фазы несущей, полученные в одной или более опорных станциях, через наземное или космическое средство связи. В ровере берутся двойные разности между парами спутник-приемник наблюдений. Например, если O1 1 - наблюдение, имеющее отношение к сигналу первого спутника, полученному в ровере, O1 2 - наблюдение, имеющее отношение к сигналу от второго спутника, принятому в ровере, O2 1 - наблюдение, имеющее отношение к сигналу от первого спутника, полученному в опорной станции, и O2 2 - наблюдение, имеющее отношение к сигналу от второго спутника, полученному в опорной станции, такая двойная разность была бы задана как (O1 1-O1 2)-(O2 1-O2 2). Более подробное описание двойных разностей дано в статье У.Воллата и др., названной "Анализ способа разрешения неопределенности трех несущих частот (TACR) для точного относительного позиционирования в глобальной навигационной спутниковой системе GNSS-2", опубликованной в "Proceedings of the ION GPS" 1998, IX-O-13, стр. 1-6. Посредством взятия этих двойных разностей ликвидируется много ошибок наблюдения и инструментальных ошибок. Однако максимальное расстояние между ровером и опорными станциями ограничено, поскольку сигналы, принятые ровером, и сигналы, принятые опорными станциями, по-разному подвергаются задержкам, происходящим из-за прохождения этих сигналов через ионосферу. Таким образом, с увеличением расстояния между ровером и опорными станциями наблюдения, полученные в ровере и в опорных станциях, декоррелируются ионосферными задержками. Эта проблема учитывается ионосферной моделью в реальном времени, которая вычисляется на основе сети опорных станций и предоставляется роверу через наземное или космическое средство связи. Эта модель определяется из анализа фазы двойной несущей частоты и наблюдений кода, полученных в опорных станциях сети. Посредством этой ионосферной модели эффект декорреляции наблюдений, полученных в ровере и в опорных станциях, может быть определен и принят во внимание при определении позиции ровера. Тем самым воздействие описанной выше декорреляции может быть смягчено.
Хотя с помощью этого подхода могут быть получены возможные расстояния между ровером и опорными станциями до нескольких сотен километров, сеть опорных станций, требуемых для выполнения метода WARTK все же должна быть относительно плотной. С другой стороны, передача наблюдений с опорных приемников на приемник ровера требует высокой пропускной способности канала передачи, и это требование значительно ограничивает количество возможных опорных приемников. Таким образом, покрытие для навигационной службы, использующей метод WARTK, выполнимо самое большее в континентальном масштабе, но предоставление глобальной навигационной услуги, основанной на методе WARTK, ввиду этого ограничения невозможно.
Ввиду изложенного выше объяснения также очевидно, что метод WARTK применим только в областях, в которых обеспечены опорные станции. В области без опорных станций или в позиции, удаленной от опорных станций, определение позиции ровера становится затруднительным, если не становится невозможным. Таким образом, метод WARTK обычно не может быть развернут для навигации на больших площадях дикой местности, в горных массивах или непроходимых областях или для навигации на больших водных поверхностях или пустынях. В соответствии с этим применение метод WARTK имеет лишь очень ограниченное использование для авиации, мореходства или исследований. Кроме того, отказ отдельных опорных станций, как это могло бы произойти из-за локальных событий, таких как неблагоприятные погодные условия или отключение электроэнергии, значительно затрудняет навигацию роверов в области, в которой вышедшая из строя опорная станция является ближайшей опорной станцией.
Альтернативным методом определения позиции ровера является метод "точного позиционирования", или "ppp", описанный, например, в статье Zumberge J.F. и др., "Точное определение позиции для эффективного и устойчивого анализа данных GPS из больших сетей. Точное определение позиции для эффективного и устойчивого анализа данных GPS от больших сетей", JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 102, NO. B3, PP. 5005-5017, 1997 doi:10.1029/96JB03860. Технологию PPP рассматривают как метод, который позволяет пользователю системы GNSS с несколькими частотами определять свою позицию с дециметровым уровнем ошибки в кинематическом режиме и на уровне сантиметра в статическом режиме с единственным приемником. Это основано на доступности спутников или служебных данных, таких как данные, имеющие отношение к орбитам спутников GNSS, и данные, имеющие отношение к внутренним часам спутников GNSS (то есть, разности между часами спутников относительно масштаба времени системы GNSS, именуемых в дальнейшем спутниковыми часами). В целях метода PPP эти спутниковые произведения должны быть значительно более точными, чем вычисленные, например, сегментом управления GPS. Поэтому в контексте метода PPP данные, относящиеся к орбитам спутников GNSS, обычно упоминаются как "точные орбиты", и данные, имеющие отношение к внутренним часам спутников GNSS, обычно упоминаются как "точные часы".
Основные признаки метода PPP будут описаны далее со ссылкой на фиг. 10.
На этапе S1201 точные часы и точные орбиты спутников GNSS принимаются пользователем. Эти точные часы и точные орбиты обеспечены поставщиком услуг GNSS. В предположении, что в данный промежуток времени n спутников GNSS находятся в поле зрения пользователя, позиции этих спутников, предсказанные из точных орбит, обозначаются как  , и внутренние часы этих спутников GNSS обозначаются как dti, где i=1, ..., n обозначает конкретный спутник GNSS. Здесь и в дальнейшем "в поле зрения пользователя" понимается в том смысле, что сигнал, переданный передатчиком GNSS в поле зрения пользователя, может проходить в приемник GNSS, соответствующий пользователю, в значительной степени по прямой линии (линии видимости между передатчиком GNSS и приемником GNSS) без преграды посредством сплошных объектов, таких как, например, здания, горы или непосредственно Земля. В дальнейшем данные, обеспеченные таким поставщиком услуг, содержащие, но без ограничения, точные часы и точные орбиты, будут называться "служебными данными" 1206.
, и внутренние часы этих спутников GNSS обозначаются как dti, где i=1, ..., n обозначает конкретный спутник GNSS. Здесь и в дальнейшем "в поле зрения пользователя" понимается в том смысле, что сигнал, переданный передатчиком GNSS в поле зрения пользователя, может проходить в приемник GNSS, соответствующий пользователю, в значительной степени по прямой линии (линии видимости между передатчиком GNSS и приемником GNSS) без преграды посредством сплошных объектов, таких как, например, здания, горы или непосредственно Земля. В дальнейшем данные, обеспеченные таким поставщиком услуг, содержащие, но без ограничения, точные часы и точные орбиты, будут называться "служебными данными" 1206.
На этапе S1202 сигналы 1207 двух разных несущих частот, переданные передатчиками GNSS на борту спутников в поле зрения пользователя, принимаются приемником GNSS, соответствующим пользователю. Если две разные несущих частоты обозначены f1 и f2, n сигналов несущей частоты f1 и n сигналов несущей частоты f2 принимаются пользователем (приемником GNSS, соответствующим пользователю).
На этапе S1203 из этих сигналов получаются n наблюдений L1 i фазы несущей, относящихся к фазам несущей сигналов несущей частоты f1, n наблюдений L2 i фазы несущей, относящихся к фазам несущей сигналов несущей частоты f2, n наблюдений P1 i кода, относящихся к информации с меткой времени, переданной с помощью сигналов несущей частоты f1, и n наблюдений P2 i кода, имеющих отношение к информации с меткой времени, переданной с помощью сигналов несущей частоты f2.
Наблюдение Pj i кода, имеющее отношение к сигналу несущей частоты fj, выводится из разности времени между приемом сигналов в приемнике GNSS и временем передачи сигнала в соответствующем передатчике GNSS через выражение Pj i=c(tk-ti), где tk - время приема, измеренное часами приемника, ti - время передачи, измеренное часами передатчика GNSS, и c - скорость света в вакууме. Упомянутая разность времени может быть получена из информации с меткой времени, составленной посредством псевдослучайного кода, который наложен на несущую сигнала. Наблюдение Lj i фазы несущей, относящееся к сигналу несущей частоты fj, выводится из разности между фазой несущей сигнала во время приема и фазой сигнала несущей во время передачи через выражение Lj i=λj(φk-φi)+λjNj i, где φk - фаза сигнала несущей во время приема, включающая в себя какое-либо смещение фазы несущей приемника, φi - фаза несущей во время передачи, включающая в себя какое-либо смещение фазы несущей передатчика, λj - длина волны сигнала несущей, и Nj i - целое число полных циклов. Целое число полных циклов Nj i неизвестно, поскольку измеряется только дробная фаза. На все наблюдения влияет много инструментальных ошибок и/или ошибок наблюдения, обсуждаемых ниже.
В этапе S1204 так называемые свободные от ионосферного влияния наблюдения Lc i фазы несущей и свободные от ионосферного влияния наблюдения Pc i кода определяются из наблюдений L1 i, L2 i фазы несущей и наблюдений P1 i, P2 i кода посредством формирования линейных комбинаций из этих наблюдений. В частности, свободные от ионосферного влияния комбинации Lc i и Pc i заданы как:


Поскольку ионосферная задержка сигнала несущей частоты f, испытываемая при прохождении через ионосферу, пропорциональна 1/f2, эффекты ионосферных задержек сигналов несущих частот f1 и f1 ликвидируются в приведенных выше комбинациях Lc i и Pc i до хорошей точности. Практически может быть достигнута ликвидация 99,9% эффектов ионосферных задержек сигналов.
Если текущая позиция ровера k обозначена как  и ошибка внутренних часов ровера обозначена как dtk, обе из которых должны быть точно оценены методикой PPP, получается следующая система уравнений наблюдения для множества из n спутников GNSS в поле зрения ровера:
и ошибка внутренних часов ровера обозначена как dtk, обе из которых должны быть точно оценены методикой PPP, получается следующая система уравнений наблюдения для множества из n спутников GNSS в поле зрения ровера:

Эти уравнения свободных от ионосферного влияния наблюдений соотносят наблюдения, полученные на этапе S1204, с фактическим расстояниям ровера до передатчиков GNSS на борту спутников GNS с учетом инструментальных ошибок и ошибок наблюдения. Здесь c - скорость света в вакууме,  - приближенная смоделированная дальность между ровером и соответствующим (i-м) спутником, и
- приближенная смоделированная дальность между ровером и соответствующим (i-м) спутником, и  - соответствующий вектор единичной длины вдоль направления, указывающего от приблизительной позиции
- соответствующий вектор единичной длины вдоль направления, указывающего от приблизительной позиции  ровера к соответствующему (i-му) спутнику. Далее, M и δΤ - соответственно, тропосферная картирующая функция и разностная вертикальная задержка, w - немоделированная ориентация антенн приемника пользователя, и длина волны λn может быть получена из несущих частот f1 и f2 через выражение
ровера к соответствующему (i-му) спутнику. Далее, M и δΤ - соответственно, тропосферная картирующая функция и разностная вертикальная задержка, w - немоделированная ориентация антенн приемника пользователя, и длина волны λn может быть получена из несущих частот f1 и f2 через выражение  . Наконец, ε и ε' соответственно представляют погрешности измерения фазы и кода, соответствующие тепловым помехам и многолучевому распространению, и Bc представляет свободную от ионосферного влияния неоднозначность фазы несущей. Выражение "неоднозначность" относится к неопределяемой части разности между фазой несущей сигнала GNSS, измеренной в приемнике GNSS ровера во время приема сигнала, и фазой несущей, измеренной в соответствующем передатчике GNSS во время передачи сигнала. Например, для данной несущей с частотой fx неоднозначность Bx i состоит из целочисленной части λXΝX, соответствующей неизвестному количеству полных циклов, первой дробной части δBx i, соответствующей инструментальному смещению передатчика GNSS соответствующего спутника (смещению фазы спутника), и второй дробной части δΒx,k, соответствующей инструментальному смещению приемника GNSS ровера (смещению фазы приемника). Здесь смещение фазы спутника указывает на смещение фазы между сигналом, сформированным в передатчике GNSS, и опорным сигналом, основанным на опорном периоде времени, и смещение фазы приемника указывает на фазовое смещение между опорным сигналом, сформированным внутри в приемнике GNSS, и опорным сигналом, основанным на опорном периоде времени.
. Наконец, ε и ε' соответственно представляют погрешности измерения фазы и кода, соответствующие тепловым помехам и многолучевому распространению, и Bc представляет свободную от ионосферного влияния неоднозначность фазы несущей. Выражение "неоднозначность" относится к неопределяемой части разности между фазой несущей сигнала GNSS, измеренной в приемнике GNSS ровера во время приема сигнала, и фазой несущей, измеренной в соответствующем передатчике GNSS во время передачи сигнала. Например, для данной несущей с частотой fx неоднозначность Bx i состоит из целочисленной части λXΝX, соответствующей неизвестному количеству полных циклов, первой дробной части δBx i, соответствующей инструментальному смещению передатчика GNSS соответствующего спутника (смещению фазы спутника), и второй дробной части δΒx,k, соответствующей инструментальному смещению приемника GNSS ровера (смещению фазы приемника). Здесь смещение фазы спутника указывает на смещение фазы между сигналом, сформированным в передатчике GNSS, и опорным сигналом, основанным на опорном периоде времени, и смещение фазы приемника указывает на фазовое смещение между опорным сигналом, сформированным внутри в приемнике GNSS, и опорным сигналом, основанным на опорном периоде времени.
На этапе S1205 описанная выше система уравнений 2n наблюдений решается посредством применения так называемого фильтра Калмана к системе уравнений наблюдения. Промежуток времени, в котором сигналы от всех передатчиков GNSS из n передатчиков GNSS на борту спутников в поле зрения ровера одновременно принимаются приемником GNSS ровера и обрабатываются, называется "эпохой". Для каждой эпохи описанная выше система уравнений 2n наблюдений обычно может быть решена, если количество спутников GNSS в поле зрения ровера равно или превышает n=4. Посредством учета решений из предыдущих эпох точность решений может быть последовательно увеличена. При применении фильтра Калмана позиция ровера и часы пользователя dtk могут быть обработаны как белый шум, разностная ("влажная") задержка δT и ориентация w антенн приемника пользователя могут рассматриваться как процесс случайных блужданий, и свободная от ионосферного влияния неоднозначность Bc фазы несущей оценивается как случайная переменная ("постоянный параметр"), за исключением возникновения событий срыва слежения. В таком случае Bc рассматривается как белый шум.
Основной недостаток описанного выше метода PPP - большое время сходимости, требуемое для получения хорошей оценки свободной от ионосферного влияния неоднозначности Bc, где Bc должно пониматься как сокращение для множества неоднозначностей Bc i, и соответственно для позиции ровера . Время сходимости может продлиться большую часть одного часа или дольше, прежде чем сможет быть получена высокая точность для позиции ровера на уровне 1-2 дециметров.
Эти проблемы метода PPP ограничивают его применение определением позиции, для которой время сходимости не является негативным моментом, например, определением позиции для медленно движущихся объектов, плавучих средств или стационарных объектов. Метод PPP в соответствии с этим не применим для определения позиции большинства наземных транспортных средств, таких как легковые автомобили или большинство воздушных судов, таких как самолеты. Кроме того, из-за долгого времени сходимости метода PPP важным является постоянный свободный обзор между ровером и соответствующими спутниками GNSS для надежной работы метода PPP. Если отслеживание человека или всех спутников теряется в масштабах времени порядка времени сходимости или меньше, надежное определение позиции вообще невозможно. Поэтому метод PPP также может быть развернут для навигации в плотно застроенных областях, таких как города, или в других областях, в которых не имеется непрерывного свободного обзора между ровером и соответствующими спутниками GNSS.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы улучшить метод навигации, известные в области техники. Дополнительная задача изобретения состоит в том, чтобы преодолеть ограничения настоящих методов навигации GNSS, главным образом, относительно времени сходимости.
Для решения упомянутых выше задач предложено обеспечить способ согласно пункту 1 формулы изобретения и устройство согласно пункту 14 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
В соответствии с аспектом изобретения обеспечен способ определения позиции объекта, имеющего приемник глобальной навигационной спутниковой системы (GNSS), способ содержит этапы, на которых: принимают приемником GNSS сигналы, которые переданы передатчиками GNSS, расположенными на борту спутников, которые расположены в поле зрения объекта; обновляют служебные данные в объекте, служебные данные включают в себя данные часов спутников, указывающие внутренние часы спутников, данные орбит спутников, указывающие позиции спутников, данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS, и данные ионосферной модели, указывающие состояние ионосферы; определяют на основе данных ионосферной модели данные ионосферных задержек, указывающие коррекции, имеющие отношение к задержкам сигналов; задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS и приемом сигналов приемником GNSS; и определяют позицию объекта на основе сигналов, данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников и определенных данных ионосферных задержек.
Посредством обеспечения служебных данных изобретения, в частности, часов спутников, орбит спутников и смещений кода задержки спутников, упомянутый выше способ изобретения может быть выполнен независимо от опорных данных, обеспеченных опорным приемником GNSS, который принимает сигналы от передатчиков GNSS на борту спутников GNSS в поле зрения пользователя. В текущем состоянии области техники такие опорные данные могут использоваться для сравнения сигналов, принятых пользователем, с опорными данными, и тем самым обеспечивается возможность определить и удалить погрешности наблюдения, которые происходят из-за инструментальных смещений, ошибок часов и ошибок позиций передатчиков GNSS. Другими словами, в соответствии с настоящим изобретением не выполняется нахождение двойной разности сигналов (или наблюдений, полученных из сигналов). В соответствии с этим решающее преимущество настоящего изобретения заключается в том, что пользователь, использующий способ изобретения, никак не зависит от близости к опорному приемнику GNSS. Таким образом, пользователь может определить свою позицию в любой точке на Земле без ограничения. Кроме того, посредством обеспечения пользователю ионосферной модели со служебными данными согласно изобретению пользователю дается возможность независимо определять коррекции, имеющие отношение к ионосферным задержкам сигналов, принятых пользователем. В соответствии с этим пользователю дается возможность корректировать ионосферные задержки сигналов, посредством чего основной источник ошибки при определении позиции пользователя устраняется, и время сходимости, которое проходит, пока позиция пользователя не будет точно определена, может быть значительно уменьшено. Коротко говоря, способ изобретения позволяет пользователю определять свою позицию в любой точке на Земле независимо от какой-либо внешней инфраструктуры, быстрым и точным образом. Таким образом, посредством обеспечения способа, соответствующего изобретению, описанные выше проблемы и недостатки, которые присутствуют в обсужденной технологии предшествующего уровня техники, отсутствуют в настоящем изобретении.
Термин "смещение кода задержки", используемое в контексте настоящего изобретения, также известен как "дифференциальное смещение кода". Таким образом, в контексте настоящего изобретения термин "данные смещения кода задержки" предназначен для обозначения "данных дифференциального смещения кода". Для каждой несущей частоты соответствующее смещение кода задержки спутника понимается как имеющее отношение к задержке между информацией с меткой времени, переданной с сигналом, и опорным периодом времени.
Предпочтительно в способе согласно изобретению все сигналы, включенные в этап определения позиции объекта, обрабатываются в неразностном режиме.
В соответствии с другим аспектом изобретения, способ предпочтительно дополнительно содержит этапы, на которых: получают данные наблюдения кода из сигналов, данные наблюдения кода имеют отношение к данным, переданным с сигналами, и содержат наблюдения кода, имеющие отношение к данным, переданным с сигналами; и получают данные наблюдения фазы несущей из сигналов, данные наблюдения фазы несущей имеют отношение к фазам несущей сигналов и содержат наблюдения фазы несущей, имеющие отношение к фазе несущей сигналов; и этап определения позиции объекта основан на данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников, данных ионосферных задержек и данных наблюдения кода, полученных из сигналов, и данных наблюдения фазы несущей, полученных из сигналов. Предпочтительно все наблюдения кода и все наблюдения фазы несущей, включенные в этап определения позиции объекта, обрабатываются в неразностном режиме. Соответственно, на этапе получения данных наблюдения кода из сигналов данные наблюдения кода предпочтительно непосредственно доступны только из одних сигналов, и на этапе получения данных наблюдения фазы несущей из сигналов данные наблюдения фазы несущей предпочтительно непосредственно доступны только их одних сигналов.
Предпочтительно на этапе определения позиции объекта обрабатывается по меньшей мере одна линейная комбинация наблюдений, которая отличается от свободных от ионосферных влияний комбинаций наблюдений и свободной от ионосферных влияний комбинации наблюдений. Другими словами, предпочтительно обрабатывается по меньшей мере одна не свободная от ионосферных влияний линейная комбинация наблюдений и свободная от ионосферных влияний линейная комбинация наблюдений. Предпочтительно, если приняты сигналы двух разных несущих частот, на этапе определения позиции объекта обрабатываются две линейные комбинации наблюдений, которые обе отличаются от свободной от ионосферных влияний комбинации наблюдений и свободных от ионосферных влияний комбинаций наблюдений. Предпочтительно, если приняты сигналы трех разных несущих частот, на этапе определения позиции объекта обрабатываются три линейные комбинации наблюдений, которые все три отличаются от свободных от ионосферных влияний комбинаций наблюдений и свободных от ионосферных влияний комбинации наблюдений.
Предпочтительно способ согласно изобретению может дополнительно содержать по меньшей мере один из этапов, на которых: определяют ионосферную задержку наблюдения кода; определяют ионосферную задержку наблюдения фазы несущей; определяют ионосферную задержку свободной от геометрии комбинации наблюдений кода; и определяют ионосферную задержку свободной от геометрии комбинации наблюдений фазы несущей.
Предпочтительно служебные данные дополнительно содержат данные смещения фаз спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS, и этап определения позиции объекта дополнительно содержит этап определения данных неоднозначности фазы несущей, указывающих по меньшей мере для одного сигнала количество полных циклов, содержащихся в разности фаз между фазой несущей сигнала в момент передачи и фазой несущей сигнала в момент приема, на основе данных наблюдения фазы несущей и данных смещения фазы спутников.
Обеспечение пользователю данных смещения фазы позволяет пользователю зафиксировать соответствующие целочисленные части неоднозначностей и тем самым точно определить неоднозначности в фазах несущей с увеличенной точностью. Поскольку неоднозначности представляют основной источник ошибок, влияющих на время сходимости точного позиционирования при определении позиции пользователя, точное определение неоднозначностей дает значительное уменьшение времени сходимости точного позиционирования определенной позиции пользователя.
В соответствии с дополнительным аспектом изобретения на этапе определения позиции объекта предпочтительно выполняется по меньшей мере один рекурсивный процесс оценки. При этом рекурсивный процесс оценки может являться фильтром. Предпочтительно, рекурсивный процесс оценки является фильтром Калмана. Предпочтительно на каждом этапе по меньшей мере одного рекурсивного процесса оценки данные состояния, содержащие по меньшей мере один элемент множества, состоящего из позиции объекта и данных неоднозначности фазы несущей, могут быть оценены на основе сигналов, данных часов спутников, данных орбит спутников, данных ионосферных задержек и оценки данных состояния, оцененных на предыдущем этапе. Данные состояния также могут содержать по меньшей мере один элемент множества, состоящего из тропосферной задержки и ориентации антенн приемника пользователя. Предпочтительно по меньшей мере один рекурсивный процесс оценки обрабатывает по меньшей мере один элемент множества, состоящего из комбинаций наблюдений фазы несущей, на которые в значительной степени влияют задержки сигналов, комбинаций наблюдений кода, на которые в значительной степени влияют задержки сигналов, наблюдений фазы несущей, на которые в значительной степени влияют задержки сигналов, и наблюдений кода, на которые в значительной степени влияют задержки сигналов.
Использование рекурсивного фильтра позволяет последовательно определять позицию пользователя с постоянно увеличивающейся точностью.
Кроме того предпочтительно данные ионосферной модели могут являться показателем разрешенного относительно позиции и глобального статуса ионосферы. В качестве альтернативы ионосферная модель также может являться показателем разрешенного относительно позиции статуса ионосферы в одной или более заданных областях Земли. Кроме того данные ионосферной модели могут представлять разные уровни точности, которая может зависеть от одной или более областей или от (приблизительной) позиции пользователя. Предпочтительно данные ионосферной модели содержат данные надежности ионосферной модели, имеющие отношение к зависящей от позиции надежности данных ионосферной модели, и этап определения позиции объекта дополнительно основан на данных надежности ионосферной модели.
Точность (надежность) ионосферной модели может зависеть от позиции пользователя. В таких случаях, если пользователю предоставлено показание относительно точности ионосферной модели в текущей приближенной позиции пользователя, эта информация может быть принята во внимание на этапе определения позиции пользователя. В частности, в процессе фильтрации коррекции, имеющие отношение к ионосферным задержкам сигналов, определенным из ионосферной модели, могут быть снабжены весовым коэффициентом, чтобы коррекциям можно дать более высокий весовой коэффициент, если точность ионосферной модели является высокой в текущей приближенной позиции пользователя, и можно дать более низкий весовой коэффициент, если точность ионосферной модели в приблизительной позиции пользователя является низкой.
В соответствии с дополнительным аспектом изобретения, если в объекте приняты сигналы по меньшей мере двух разных частот, этап определения позиции объекта может предпочтительно дополнительно содержать этапы, на которых: получают для каждого из спутников широкополосную комбинацию фаз из данных наблюдения фазы несущей и соответствующую узкополосную комбинацию кодов из данных наблюдения кода; получают для каждого из спутников комбинацию Мельбурна-Вуббена (Melbourne-Wübbena) широкополосной комбинации фаз и соответствующей узкополосной комбинации кодов; оценивают для каждого из спутников широкополосную неоднозначность на основе комбинаций Мельбурна-Вуббена и данных смещения кода задержки спутников посредством первого рекурсивного процесса оценки; получают для каждого из спутников свободную от геометрии комбинацию фаз из данных наблюдения фазы несущей; оценивают для каждого из спутников свободную от геометрии неоднозначность на основе свободных от геометрии комбинаций и данных ионосферных задержек посредством второго рекурсивного процесса оценки; оценивают для каждого из спутников свободную от ионосферных влияний неоднозначность на основе оценки соответствующей широкополосной неоднозначности и оценки соответствующей свободной от геометрии неоднозначности; получают для каждого из спутников свободную от ионосферных влияний комбинацию фаз из данных наблюдения фазы несущей и свободную от ионосферных влияний комбинацию кодов из данных наблюдения кода; и определяют позицию объекта на основе свободных от ионосферных влияний комбинаций фаз, свободных от ионосферных влияний комбинаций кодов и оценок ионосферных неоднозначностей посредством третьего рекурсивного процесса оценки.
В соответствии с другим аспектом изобретения, если в объекте приняты сигналы по меньшей мере трех разных частот, этап определения позиции объекта может предпочтительно дополнительно содержать этапы, на которых: получают для каждого из спутников сверхширокополосную комбинацию фаз из данных наблюдения фазы несущей и соответствующую узкополосную комбинацию кодов из данных наблюдения кода; получают для каждого спутников комбинацию Мельбурна-Вуббена из сверхширокополосной комбинации фаз и соответствующей узкополосной комбинации кодов; оценивают для каждого из спутников сверхширокополосную неоднозначность на основе комбинаций Мельбурна-Вуббена и данных смещения кода задержки спутников посредством первого рекурсивного процесса оценки; получают для каждого из спутников широкополосную комбинацию фаз из данных наблюдения фазы несущей; оценивают для каждого из спутников широкополосную неоднозначность на основе широкополосных комбинаций фаз, сверхширокополосных комбинаций, оценок сверхширокополосных неоднозначностей и данных ионосферных задержек посредством второго рекурсивного процесса оценки; получают для каждого из спутников свободную от геометрии комбинацию фаз (такую как LI=L1-L2, также известную как ионосферная комбинация), соответствующую тем двум частотам из трех разных частот, которые имеют самую большую взаимную разность по частоте, из данных наблюдения фазы несущей; оценивают для каждого из спутников свободную от геометрии неоднозначность на основе свободных от геометрии комбинаций фаз и данных ионосферных задержек посредством третьего рекурсивного процесса оценки; оценивают для каждого из спутников свободную от ионосферных влияний неоднозначность на основ соответствующей оценки широкополосной неоднозначности и соответствующей оценки свободной от геометрии неоднозначности; получают для каждого из спутников свободную от ионосферных влияний комбинацию фаз, соответствующую тем двум частотам из трех разных частот, которые имеют самую большую взаимную разность по частоте, из данных наблюдения фазы несущей и свободной от ионосферных влияний комбинации кодов, соответствующей тем двум частотам из трех разных частот, которые имеют самую большую взаимную разность по частоте, из данных наблюдения кода; и определяют позицию объекта на основе свободных от ионосферных влияний комбинаций фаз, свободных от ионосферных влияний комбинаций кодов и оценок ионосферных неоднозначностей посредством четвертого рекурсивного процесса оценки.
Предпочтительно по меньшей мере одна стационарная наземная станция служит в качестве центрального средства обработки, и множество стационарных наземных станций, каждая из которых имеет приемник GNSS, служат в качестве сетевых станций, по меньшей мере одно центральное средство обработки и множество сетевых станций формируют сеть, служебные данные получаются сетью и передаются объекту, и получение данных ионосферной модели содержит этапы на которых: принимают в сетевых станциях сигналы, переданные передатчиками GNSS, расположенными на борту множества спутников, расположенных в поле зрения по меньшей мере одной из сетевых станций; определяют сетевые данные ионосферных задержек, указывающие коррекции, имеющие отношение к задержкам сигналов, принятых в сетевых станциях, задержки сигналов, принятых в сетевых станциях, происходят в результате прохождения сигналов, приняты в сетевых станциях, через ионосферу; и определяют данные ионосферной модели из сетевых данных ионосферных задержек. Предпочтительно сигналы, принятые в сетевых станциях, являются сигналами по меньшей мере двух разных частот.
Кроме того, данные смещения фазы несущей спутников могут быть получены на основе сигналов, принятых в сетевых станциях, и постоянно передаются объекту.
В соответствии с изобретением определение данных ионосферной модели может дополнительно содержать этапы, на которых: разлагают количественную плотность свободных электронов в ионосфере во множество функций; и оценивают данные содержания электронов, указывающие коэффициенты множества функций, на основе сетевых данных ионосферных задержек. Предпочтительно, эти функции являются основанными на вокселах функциями, такими что ионосфера подразделена на множество ячеек объема ("вокселов") посредством применения к ионосфере решетки, и коэффициенты основанных на вокселах функций соответствуют количеству свободных электронов в пределах каждой ячейки объема. В качестве альтернативы функции также являться такими функциями, как эмпирические ортогональные функции, сферические гармоники или профили Чепмена.
Обеспечение такой ионосферной модели позволяет пользователю определять ионосферные задержки сигналов GNSS, принятых в приемнике GNSS, соответствующем пользователю, и переданных передатчиком GNSS на борту спутника GNSS в поле зрения пользователя. На основе приблизительной позиции пользователя, позиции спутника GNSS, которая может быть получена из данных орбит спутников, и плотности или общего содержания свободных электронов вдоль линии видимости между приемником GNSS и передатчиком GNSS, которые могут быть получены из ионосферной модели, пользователь может определить ионосферные задержки сигналов GNSS без дополнительной внешней информации.
Предпочтительно геодезические данные, имеющие отношение по меньшей мере к одному элементу множества, состоящего из внутренних часов множества спутников, позиций множества спутников, смещений кода задержки передатчиков GNSS на борту множества спутников и смещений фазы несущей передатчиков GNSS на борту множества спутников и ионосферных данных, имеющих отношение к состоянию ионосферы, обрабатываются одновременно первым процессом оценки и вторым процессом оценки, первый и второй процессы оценки имеют разные скорости обработки и взаимодействуют друг с другом.
На основании этой конфигурации определение данных в средстве CPF, которые должны часто обновляться на стороне пользователя (например, один раз в эпоху), например, данные часов спутников, и данные, которые не должны обновляться с такой высокой частотой обновления, например, ионосферная модель, могут быть разъединены. В соответствии с этим, например, точные данные часов спутников могут быть получены посредством первого, быстрого процесса фильтрации, в то время как, например, ионосферная модель может быть получена посредством второго, более медленного процесса фильтрации. Посредством обеспечения выходной информации второго процесса фильтрации первому процессу фильтрации может быть достигнута оптимальная точность определенных данных. Кроме того, быстро изменяющиеся элементы служебных данных изобретения и более медленно изменяющиеся элементы служебных данных изобретения могут быть определены в согласованной платформе посредством одного объединенного процесса. Таким образом, могут быть получены и высокая точность для всех элементов служебных данных, и высокие частоты обновления для отдельных элементов служебных данных, таких как точные часы спутников, и все элементы служебных данных могут быть определены в согласованной платформе. Таким образом, описанная выше конфигурация изобретения позволяет обеспечивать пользователю служебные данные оптимального качества, посредством чего производительность относительно времени сходимости и/или точности позиции при определении позиции пользователя может быть улучшена. Одновременно может быть значительно ограничена необходимая вычислительная мощность для определения служебных данных изобретения.
В соответствии с другим аспектом изобретения частота обновления часов спутника, частота обновления данных орбит спутников и частота обновления ионосферной модели, соответственно указывающие частоту, с которой данные часов спутников постоянно обновляются в объекте, частоту, с которой данные орбит спутников постоянно обновляются в объекте, и частоту, с которой данные ионосферной модели постоянно обновляются в объекте, выбраны таким образом, что частота обновления данных часов спутников больше частоты обновления данных орбит спутников, и частота обновления данных часов спутников больше частоты обновления данных ионосферной модели.
Поскольку, например, точность часов спутников, сохраняемая на стороне пользователя, быстро ухудшается, данные часов спутников должны часто передаваться пользователю, то есть, с высокой частотой обновления, обычно один раз в эпоху. В противоположность часам спутников орбиты спутников и другие элементы служебных данных не ухудшаются так быстро и могут передаваться пользователю с более низкой частотой обновления. Ионосферная модель, например, должна обновляться с частотой обновления один раз каждые десять минут, или даже с более низкой частотой обновления. Посредством передачи отдельных элементов служебных данных с индивидуально адаптированными частотами обновления пропускная способность, требуемая для передачи служебные данные, может быть значительно уменьшена. Как правило, в настоящем изобретении пропускная способность, требуемая для передачи служебных данных, составляет 250 байт в секунду для каждой совокупности.
Кроме того, в соответствии с изобретением обеспечено устройство, устройство содержит: средство для приема сигналов, которые переданы передатчиками GNSS на борту заданного количества спутников, расположенных в поле зрения устройства; средство для обновления служебных данных, служебные данные содержат данные часов спутников, указывающие внутренние часы спутников, данные орбит спутников, указывающие позиции спутников, данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS, и данные ионосферной модели, указывающие состояние ионосферы; средство для определения на основе данных ионосферной модели данных ионосферных задержек, указывающих коррекции, имеющие отношение к задержкам сигналов; задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS и приемом сигналов средством для приема сигналов; и средство для определения позиции устройства на основе сигналов, данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников и данных ионосферных задержек.
Предпочтительно устройство дополнительно содержит: средство для получения данных наблюдения кода из сигналов, данные наблюдения кода имеют отношение к данным, переданным с сигналами, и содержат наблюдения кода, имеющие отношение к данным, переданным с сигналами; и средство для получения данных наблюдения фазы несущей из сигналов, данные наблюдения фазы несущей имеют отношение к фазам несущей сигналов и содержат наблюдения фазы несущей, имеющие отношение к фазе несущей сигналов; и средство для определения позиции объекта дополнительно выполнено с возможностью определять позицию объекта на основе данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников, данных ионосферных задержек и по меньшей мере одного элемента множества, состоящего из данных наблюдения кода, полученных из сигналов, и данных наблюдения фазы несущей, полученных из сигналов.
Предпочтительно все наблюдения кода и все наблюдения фазы несущей, включенные в этап определения позиции объекта, являются неразностными наблюдениями. Соответственно, средство для получения данных наблюдения кода из сигналов предпочтительно дополнительно выполнено с возможностью однозначно получать данные наблюдения кода только из одних сигналов, и средство для получения данные наблюдения фазы несущей из сигналов предпочтительно дополнительно выполнено с возможностью однозначно получать данные наблюдения фазы несущей только из одних сигналов.
Устройство изобретения может дополнительно содержать по меньшей мере один элемент из множества, состоящего из: средства для определения ионосферной задержки наблюдения кода; средство для определения ионосферной задержки наблюдения фазы несущей; средство для определения ионосферной задержки свободной от геометрии комбинации наблюдений кода; и средство для определения ионосферной задержки свободной от геометрии комбинации наблюдений фазы несущей.
Предпочтительно средство для обновления служебных данных выполнено с возможностью обновлять служебные данные, дополнительно содержащие данные смещения фаз спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS, и средство для определения позиции объекта дополнительно выполнено с возможностью определять данные неоднозначности фазы несущей, указывающие по меньшей мере для одного сигнала количество полных циклов, содержащихся в разности фаз между фазой несущей сигнала в момент передачи и фазой несущей сигнала в момент приема, на основе данных наблюдения фазы несущей и данных смещения фазы спутников.
В соответствии с дополнительным аспектом изобретения средство для определения позиции объекта дополнительно выполнено с возможностью исполнять по меньшей мере один рекурсивный процесс оценки. При этом рекурсивный процесс оценки может являться фильтром. Предпочтительно рекурсивный процесс оценки является фильтром Калмана.
Средство для определения позиции объекта может быть дополнительно выполнено с возможностью на каждом этапе по меньшей мере одного рекурсивного процесса оценки оценивать данные состояния, содержащие по меньшей мере один элемент множества, состоящего из позиции объекта и данных неоднозначности фазы несущей, на основе сигналов, данных часов спутников, данных орбит спутников, данных ионосферных задержек и оценки данных состояния, оцененных на предыдущем этапе. Данные состояния также могут содержать по меньшей мере один элемент множества, состоящего из тропосферной задержки и ориентации антенн приемника пользователя. Предпочтительно по меньшей мере один рекурсивный процесс оценки обрабатывает по меньшей мере один элемент множества, состоящего из комбинаций наблюдений фазы несущей, на которые в значительной степени влияют задержки сигналов, комбинаций наблюдений кода, на которые в значительной степени влияют задержки сигналов, наблюдений фазы несущей, на которые в значительной степени влияют задержки сигналов, и наблюдений кода, на которые в значительной степени влияют задержки сигналов.
В соответствии с дополнительным аспектом изобретения обеспечена система, содержащая описанное выше устройство, и сеть, сформированная по меньшей мере одним центральным средством обработки, которое является стационарной наземной станцией, и множеством сетевых станций, которые являются стационарными наземными станциями, каждая из которых содержит приемник GNSS, причем сеть выполнена с возможностью получать служебные данные и передавать служебные данные устройству. Предпочтительно центральное средство обработки содержит средство для получения служебные данные. Дополнительно предпочтительно центральное средство обработки содержит средство для передачи служебных данных устройству.
Предпочтительно сетевые станции содержат средство для приема сигналов, переданных передатчиками GNSS, расположенными на борту множества спутников, расположенных в поле зрения по меньшей мере одной из сетевых станций, и центральное средство обработки содержит: средство для определения сетевых данных ионосферных задержек, указывающих коррекции, имеющие отношение к задержкам сигналов, принятых в сетевых станциях, задержки сигналов, принятых в сетевых станциях, происходят в результате прохождения сигналов, принятых в сетевых станциях через ионосферу; и средство для определения данных ионосферной модели из сетевых данных ионосферных задержек. При этом сигналы, принятые средством для приема сигналов, предпочтительно являются сигналами по меньшей мере двух разных частот.
В соответствии с изобретением центральное средство обработки может дополнительно содержать: средство для разложения количественной плотности свободных электронов в ионосфере во множество функций; и средство для оценки данных содержания электронов, указывающих коэффициенты множества функций, на основе сетевых данных ионосферных задержек. Предпочтительно, эти функции являются основанными на вокселах функциями, такими что ионосфера подразделена на множество ячеек объема ("вокселов") посредством применения к ионосфере решетки, и коэффициенты основанных на вокселах функций соответствуют количеству свободных электронов в пределах каждой ячейки объема. В качестве альтернативы функции также являться такими функциями, как эмпирические ортогональные функции, сферические гармоники или профили Чепмена.
Предпочтительно центральное средство обработки содержит: первое средство обработки для обработки геодезических данных, имеющих отношение по меньшей мере к одному элементу множества, состоящего из внутренних часов множества спутников, позиций множества спутников, смещений задержек кода передатчиков GNSS на борту множества спутников и смещений фазы несущей передатчиков GNSS на борту множества спутников; и второе средство обработки для обработки ионосферных данных, имеющих отношение к состоянию ионосферы, причем первое средство обработки выполнено с возможностью исполнять первый процесс оценки, и второе средство обработки выполнено с возможностью исполнять второй процесс оценки, первый и второй процессы оценки имеют разные скорости обработки и взаимодействуют друг с другом.
Средство для передачи служебных данных устройству может быть выполнено таким образом, что частота обновления часов спутников, частота обновления данных орбит спутников и частота обновления ионосферной модели, соответственно указывающие частоту, с которой данные часов спутников постоянно обновляются в объекте, частоту, с которой данные орбит спутников постоянно обновляются в объекте, и частоту, с которой данные ионосферной модели постоянно обновляются в объекте, выбраны таким образом, что частота обновления данных часов спутников больше частоты обновления данных орбит спутников, и частота обновления данных часов спутников больше частоты обновления данных ионосферной модели.
Краткое описание чертежей
Изобретение подробно описано далее со ссылкой на приложенные чертежи:
Фиг. 1 схематично иллюстрирует навигационную систему для реализации способа изобретения и показывает ровер и несколько спутников в поле зрения ровера.
Фиг. 2 иллюстрирует схему способа изобретения для определения позиции ровера.
Фиг. 3 показывает блок-схему последовательности операций, иллюстрирующую вариант осуществления изобретения.
Фиг. 4 показывает блок-схему последовательности операций, иллюстрирующую другой вариант осуществления изобретения.
Фиг. 5 показывает блок-схему последовательности операций, иллюстрирующую другой вариант осуществления изобретения.
Фиг. 6 показывает блок-схему последовательности операций, иллюстрирующую другой вариант осуществления изобретения.
Фиг. 7 показывает карту мира, указывающую иллюстративные позиции наземных станций сети наземных станций в соответствии с изобретением.
Фиг. 8 иллюстрирует схему центрального средства обработки в соответствии с изобретением.
Фиг. 9 схематично иллюстрирует устройство для определения позиции ровера с использованием способа изобретения.
Фиг. 10 показывает блок-схему последовательности операций, иллюстрирующую способ определения позиции предшествующего уровня техники.
Подробное описание предпочтительных вариантов осуществления изобретения
В качестве иллюстрации и без какого-либо ограничения объема изобретения далее внимание будет сосредоточено на предпочтительных вариантах осуществления изобретения. Определения технических терминов, данные в дальнейшем, предназначены только для иллюстративных целей без намерения ограничения объема изобретения.
Фиг. 1 показывает ровер SUR, имеющий приемник GNSS SURGNSS, и несколько спутников SAT1-SATn, каждый из которых снабжен передатчиком GNSS GNSSE1-GNSSEn. Передатчики GNSS GNSSE1-GNSSEn передают сигналы, содержащие несущую с предопределенной несущей частотой, а также информацию с меткой времени, состоящую из псевдослучайного кода, который наложен на несущую. Каждый из передатчиков GNSS GNSSE1-GNSSEn может передавать сигналы разных несущих частот. Например, среди других систем, настоящее изобретение применимо к системе глобального позиционирования (GPS), системе Galileo или модернизированной системе GPS. В них передатчики GPS передают сигналы двух разных несущих частот, в то время как передатчики модернизированной системы GPS и Galileo передают сигналы трех или более разных несущих частот. Сигналы, переданные передатчиками GNSS GNSSE1-GNSSEn, затем принимаются приемником GNSS SURGNSS на борту ровера SUR. В приведенном выше описании подразумевается, что сигналы, переданные передатчиками GNSS GNSSE1-GNSSEn, передаются непрерывно. Промежуток времени, в котором сигналы от всех передатчиков GNSS GNSSE1-GNSSEn на борту спутников SAT1-SATn в поле зрения ровера SUR одновременно принимаются приемником GNSS SURGNSS ровера SUR и обрабатываются, называется "эпохой". Временной интервал между эпохами может быть выбран произвольно, например секунда опорного стандартного времени. Однако альтернативные продолжительности временных интервалов между эпохами явным образом содержатся в объеме изобретения. В дополнение к сигналам, передаваемым передатчиками GNSS GNSSE1-GNSSEn, ровер также принимает служебные данные, которые, например, могут быть переданы центральным средством обработки, или "CPF", содержащимся в сети стационарных наземных станций (не показаны на фигуре).
Фиг. 2 иллюстрирует схему определения позиции пользователя в соответствии с настоящим изобретением. Пользователю 201 предоставляют наблюдения 206, полученные из сигналов GNSS, принятых приемником GNSS. Эквивалентно, пользователю 201 могут быть предоставлены сигналы GNSS непосредственно, как они приняты приемником GNSS. Затем предоставленные наблюдения 206 подвергаются обнаружению срыва слежения посредством обнаружения потери фиксации отслеживания для одного или более спутников, и если срыв слежения был обнаружен, невязки 203 до подгонки определяются на основе предоставленных наблюдений и служебных данных 207, предоставленных пользователю поставщиком услуг. Специалисту в данной в области техники должно быть ясно, что пользователь привязан к устройству для выполнения описанных выше процедур. В частности, подразумевается, что такое устройство содержит средство для приема сигналов GNSS, такое как приемник GNSS, средство для получения наблюдений из принятых сигналов GNSS, средство для приема служебных данных, средство для выполнения обнаружения срыва слежения и средство для получения невязок до подгонки.
Служебные данные 207 содержат точные часы спутников (данные часов спутников, указывающие внутренние часы спутников), точные орбиты спутников (данные орбит спутников, указывающие позиции спутников), смещения кода задержки передатчиков GNSS на борту спутников (данные смещения кода задержки спутников, указывающие смещения кода задержки передатчиков GNSS) и ионосферную модель (данные ионосферной модели, указывающие состояние ионосферы). Точные часы в соответствии с изобретением имеют немного более хорошую точность (приблизительно 6 см при преобразовании в точность позиции) благодаря фиксированию неоднозначности, которая выполняется в процессе определения точных часов (см. ниже), по сравнению с часами, используемыми в традиционной методике PPP (приблизительно 8 см при преобразовании в точность позиции). Точные орбиты в соответствии с изобретением имеют аналогичную точность (приблизительно 5 см при преобразовании в точность позиции) по сравнению с орбитами, используемыми в традиционном методе PPP. Смещения кода задержки спутников имеют отношение к инструментальным задержкам передатчиков GNSS на борту спутников GNSS. Для каждой несущей частоты соответствующее смещение кода задержки спутника имеет отношение к задержке между информацией с меткой времени, переданной с помощью сигналов, и опорным периодом времени.
Здесь и в дальнейшем подразумевается, что термин "служебные данные" относится к любому виду данных, которые приняты пользователем, и они отличаются от сигналов GNSS, переданных передатчиками GNSS на борту спутников GNSS. Также указывается, что здесь и в дальнейшем служебные данные не содержат наблюдения и/или сигналы, полученные в других приемниках GNSS. Как следствие, приложение способа изобретения не зависит с близости к опорному приемнику GNSS. Кроме того, пропускная способность, требуемая для передачи служебных данных, значительно уменьшена относительно случая, в котором опорные наблюдения и/или сигналы передаются со служебными данными.
В дополнение к описанным выше элементам служебные данные 207 также могут содержать неоднозначности дробных частей спутников (данные смещения фаз спутников, имеющие отношения к смещениям фазы несущей передатчиков GNSS) для каждого сигнала данной несущей частоты, имеющие отношение к смещениям фазы несущей относительно опорного периода времени.
Ионосферная модель, содержащаяся в служебных данных 207, указывает содержание свободных электронов в ионосфере. Свободные электроны в ионосфере, главным образом, формируются через солнечную радиацию. Поскольку солнечная радиация меняется в зависимости от времени и отличается в разных точках ионосферы, плотность свободных электронов в ионосфере зависит и от времени, и от позиции. Кроме того, ионосфера не вращается вместе с Землей, что приводит к дополнительной временной зависимости состояния ионосферы, если рассматривается система координат, которая фиксирована относительно Земли. Ионосферная модель предоставляет информацию, которая достаточна для определения плотности свободных электронов для данной позиции в пределах ионосферы или для ячейки объема предопределенного размера в пределах ионосферы. Например, ионосфера может быть разделена на множество ячеек объема или "вокселей", расположенных на нескольких уровнях, окружающих Землю, и ионосферная модель может содержать общее количество свободных электронов для каждой ячейки объема. Кроме того, функция плотности свободных электронов в ионосфере может быть разложена во множество функций, таких как эмпирические ортогональные функции, сферические гармоники или профили Чепмена, и модель ионосферы может содержать коэффициенты этих функций. Следует понимать, что перечисление этих функций имеет лишь иллюстративную природу, и специалист в области техники понимает, что для подразделения ионосферы также могут использоваться другие функции кроме упомянутых выше функций. На основе информации, предоставленной пользователю посредством ионосферной модели может быть определено интегрированное содержание свободных электронов вдоль линии видимости между приемником GNSS и передатчиком GNSS на борту спутника GNSS в поле зрения приемника GNSS или содержание свободных электронов в цилиндре, выровненном с линией видимости и имеющем площадь поперечного сечения, например, один квадратный метр (м2). Обычно содержание 1016 свободных электронов в таком цилиндре называется единицей полного электронного содержания (TECU).
Невязки 203 до подгонки, полученные из наблюдений 206, и служебные данные 207 используются для выполнения оценки 204 фильтра, которая позволяет определять позицию 208 пользователя. Более подробная информация, имеющая отношение к невязкам 203 до подгонки и оценке 204 фильтра, будет дана ниже. Чтобы увеличить точность определенной позиции 208 пользователя и уменьшить время сходимости, требуемое для выполнения оценки 204 фильтра, неоднозначности дробных частей спутника, содержащиеся в служебных данных 207, могут использоваться для ограничения неоднозначностей 205 с нулевой разностью, имеющих отношение к наблюдениям фазы несущей или линейным комбинациям наблюдений, включающих в себя наблюдения фазы несущей. В соответствии с этим устройство, соответствующее пользователю, дополнительно содержит средство для получения невязок до подгонки и средство для выполнения оценки фильтра. При этом средство для получения невязок до подгонки и средство для выполнения оценки фильтра могут быть независимыми или могут являться частью средства для определения позиции пользователя.
Вариант осуществления настоящего изобретения, в котором сигналы GNSS двух разных несущих частот принимаются пользователем и обрабатываются для определения позиции пользователя, будет описан далее со ссылкой на фиг. 3.
При этом следует понимать, что сигналы произвольного количества разных несущих частот могут быть переданы передатчиками GNSS на борту спутников GNSS в поле зрения пользователя, но приемник GNSS на стороне пользователя может быть ограничен приемом сигналов только двух разных несущих частот. Кроме того, может случиться, что приемник GNSS на стороне пользователя может принимать сигналы произвольного количества разных несущих частот, но только сигналы двух разных несущих частот могут быть обработаны на стороне пользователя.
На этапе S310 принимаются служебные данные 310, которые предпочтительно переданы средством CPF. Предпочтительно средство CPF соответствует поставщику услуг. Служебные данные 310 содержат точные часы спутников (данные часов спутников, указывающие внутренние часы спутников GNSS), точные орбиты спутников (данные орбит спутников, указывающие позиции спутников GNSS), смещения кода задержки спутников (данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS) и ионосферную модель (данные ионосферной модели, указывающие состояние ионосферы). Служебные данные 310 могут дополнительно содержать неоднозначности дробных частей спутников (данные смещения фаз спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS). Поскольку разные элементы служебных данных 310 изменяются в разных масштабах времени, они могут передаваться и приниматься с разными частотами обновления. Например, точность часов спутников, сохраняемая на стороне пользователя, быстро ухудшается в отсутствие нового ввода, в то время как состояние ионосферы обычно изменяется в масштабе времени порядка часов или по меньшей мере десятков минут. В соответствии с этим часы спутников могут передаваться с самой высокой частотой обновления, предпочтительно в каждой эпохе, орбиты спутников могут передаваться с уменьшенной частотой обновления, предпочтительно каждые несколько минут, смещения кода задержки спутников и неоднозначности дробных частей спутников могут передаваться с дополнительной уменьшенной частотой обновления, предпочтительно каждые несколько минут, и ионосферная модель может передаваться с аналогичной частотой обновления в несколько минут.
На этапе S302 сигналы двух разных несущих частот, переданные передатчиками GNSS на борту нескольких спутников GNSS в поле зрения пользователя, принимаются приемником GNSS, соответствующим пользователю. В дальнейшем две разные несущие частоты будут обозначаться f1 и f2. Если n обозначает количество спутников GNSS в поле зрения пользователя, на этом этапе принимается 2n сигналов.
На этапе S303 из спутниковых сигналов, принятых на этапе S302, получаются наблюдения. Для каждого сигнала несущей частоты f могут быть получены наблюдение L фазы несущей и наблюдение P кода. В соответствии с этим для двух разных несущих частот, обозначенных fx и f2, на этом этапе могут быть получены n наблюдений L1 i фазы несущей, n наблюдений L2 i фазы несущей, n наблюдений P1 i кода и n наблюдений P2 i кода, где нижний индекс обозначает несущую частоту f1 или f2 соответствующего сигнала, и верхний индекс i=1, ..., n обозначает соответствующий передатчик GNSS (или, эквивалентно, соответствующий спутник GNSS).
Когда радиосигнал, такой как сигнал GNSS, проходит через ионосферу, он испытывает задержку, так называемую ионосферную задержку. В случае, в котором сигнал GNSS задерживается, фаза несущей, измеренная в приемнике GNSS, принимающем сигнал GNSS, отличается от случая, в котором сигнал GNSS не задерживается. Таким образом, наблюдение фазы несущей, полученное из задержанного сигнала GNSS, также подвергается влиянию ионосферной задержки сигнала GNSS и само испытывает ионосферную задержку. Также наблюдение кода, полученное из сигнала GNSS, имеющее отношение к информации с меткой времени, переданной с сигналом GNSS, подвергается влиянию ионосферной задержки сигнала GNSS, и поэтому само наблюдение кода испытывает ионосферную задержку.
На этапе S304 определяются ионосферные задержки сигналов и/или наблюдений. На основе ионосферной модели может быть определено интегрированное содержание свободных электронов вдоль линии видимости между приемником GNSS и передатчиком GNSS на борту спутника GNSS в поле зрения приемника GNSS или содержание свободных электронов в цилиндре, выровненном с линией видимости и имеющем площадь поперечного сечения, например, один квадратный метр (м2). Ионосферная задержка сигнала GNSS несущей частоты f зависит от общего содержания свободных электронов вдоль линии видимости между приемником GNSS и передатчиком GNSS и обратно пропорциональна квадрату частоты f. Например, для сигнала GNSS несущей частоты f=1,575 ГГц (диапазон L1 GPS) общее содержание электронов, составляющее 0,26 TECU, приводит к задержке сигнала, составляющей 4 см, или соответственно к задержке, составляющей 133 пикосекунд. В соответствии с этим ионосферная задержка сигнала GNSS может быть определена, например, из общего содержания свободных электронов вдоль линии видимости между приемником GNSS и передатчиком GNSS или содержания свободных электронов в цилиндре, выровненном с линией видимости и имеющем площадь поперечного сечения, например, один квадратный метр (м2). Из задержки сигнала GNSS ионосферные задержки наблюдений фазы несущей и наблюдений кода, полученных из сигнала GNSS, могут быть получены прямым способом, и из них в свою очередь могут быть получены ионосферные задержки линейных комбинаций наблюдений фазы несущей и наблюдений кода.
Ионосферная модель может быть снабжена данными надежности, указывающими для каждой позиции Земли надежность ионосферной модели в этой позиции. Как будет описано ниже, ионосферная модель получена сетью фиксированных наземных станций, каждая из которых имеет приемник GNSS и привязана к центральному средству обработки. В областях, где сеть фиксированных наземных станций является плотной, ионосферная модель может быть определена с высокой точностью (высокая надежность), тогда как в областях, в которых сеть фиксированных наземных станций является менее плотной, ионосферная модель определена с меньшей точностью (меньшая надежность). В случае, в котором ионосферная модель обеспечена с меньшей надежностью, может быть определена точность (надежность) ионосферных задержек, определенных из ионосферной модели. На последующих этапах при выполнении оценки фильтра может быть принята во внимание точность ионосферных задержек, определенных из ионосферной модели.
Определение позиции пользователя на основе сигналов, принятых на этапе S302, часов спутников, орбит спутников, смещений кода задержки спутников, принятых на этапе S301, и ионосферных задержек, определенных на этапе S304, будет теперь описано со ссылкой на этапы S305-S309.
На этапе S305 сначала из наблюдений получаются линейные комбинации наблюдений. Для каждого передатчика GNSS получается одна такая первая линейная комбинация наблюдений, полученных на этапе S303. В соответствии с этим получается в общей сложности n первых линейных комбинаций. В дальнейшем всякий раз, когда линейная комбинация наблюдений получается для каждого передатчика GNSS, она будет просто называться линейной комбинацией наблюдений. Для ясности под "линейной комбинацией" или "комбинацией" понимается множество из n различных линейных комбинаций. Такая же терминология будет в дальнейшем применяться к наблюдениям, линейным комбинациям наблюдений, неоднозначностям и т.п., таким образом, если не указано иначе, каждое из этих выражений соответственно относится к множеству из n (то есть, по одному для каждого спутника GNSS) наблюдений, линейных комбинаций наблюдений, неоднозначностей и т.п.
В соответствии с настоящим изобретением первая линейная комбинация наблюдений, полученная на этапе S305, отличается от свободных от ионосферного влияния комбинаций. Таким образом, первая линейная комбинация наблюдений в значительной степени подвержена влиянию ионосферных задержек.
Предпочтительно первая линейная комбинация имеет длину волны, которая больше длин волн λ1=c/f1 и λ2=c/f2 сигналов GNSS несущих частот f1 и f2, соответственно. Кроме того, предпочтительно, длина волны первой линейной комбинации является максимальной длиной волны, которую можно получить для линейной комбинации наблюдений, имеющих отношение к несущим частотам f1 и f2. Если сформирована первая линейная комбинация с большой длиной волны, ионосферные задержки первых линейных комбинаций не обязательно должны быть приняты во внимание на этом этапе и следующих этапах. Однако следует понимать, что принятие во внимание исправлений, которые происходят из-за ионосферных задержек первых линейных комбинаций на этом этапе и следующих этапах, находится в объеме изобретения.
Хотя на этапе 305 может быть формировано много разных линейных комбинаций наблюдений, в соответствии с настоящим изобретением первая линейная комбинация наблюдений предпочтительно является комбинацией Мельбурна-Вуббена Lw i-Pn i широкополосных наблюдений Lw i фазы несущей и широкополосных наблюдений Pn i кода (иногда также называемых узкополосными наблюдениями кода). Более подробное описание комбинации Мельбурна-Вуббена может быть найдено в статье W. G. Melbourne "Случай определения дальности геодезических систем на основе GPS", опубликованной в "Proceedings of first international symposium on precise positioning with the global positioning system", US, pp 373-386, 1985, и в статье G. Wübbena "Разработка программного обеспечения для геодезического позиционирования с помощью системы GPS с использованием кода TI-4100 и измерений несущей", ibid., pp 403-412, 1985. Широкополосные наблюдения Lw i фазы несущей и широкополосные наблюдения Pn i кода получаются из наблюдений, полученных на этапе S303, посредством:

На этапе S306 оценивается первая неоднозначность, имеющая отношение к первой линейной комбинации наблюдений. Из первой линейной комбинации может быть получена система из n уравнений наблюдения. Посредством ввода смещений кода задержки, полученных из данных смещения кода задержки, и посредством применения рекурсивного процесса оценки к системе из n уравнений наблюдения система может быть решена, и неоднозначность первой линейной комбинации наблюдений может быть оценена. В соответствии с настоящим изобретением, первая неоднозначность, которая является неоднозначностью первой линейной комбинации наблюдений, отличается от свободной от ионосферного влияния неоднозначности. Предпочтительно рекурсивный процесс оценки представляет собой фильтр, и более предпочтительно фильтр является фильтром Калмана. При этом рекурсивный процесс оценки представляет собой процесс, в котором на каждом этапе процесса данные, например, содержащие позицию пользователя и/или неоднозначность фазы несущей, оцениваются на основе сигналов, данных часов спутников, данных орбиты спутников, данных ионосферной задержки и оценки данных, оцененных на предыдущем этапе.
На этапе S306 в случае, если первая комбинация наблюдений является комбинацией Мельбурна-Вуббена Lw i-Pn i, между комбинацией Мельбурна-Вуббена, смещениями Di кода задержки спутника, смещением Dk кода задержки приемника и широкополосной неоднозначностью Bw i имеется особое отношение, и получается следующая система из n уравнений наблюдения:

В них длины волн λw=c/(f1-f2), λn=c/(f1+f2), и смещения Di задержки кода спутников (включенные в служебные данные, принятые на этапе S301), соответствуют свободной от геометрии комбинации. Посредством применения рекурсивного процесса оценки, предпочтительно фильтра, более предпочтительно фильтра Калмана, к системе из n уравнений (7), каждая широкополосная неоднозначность Bw i может быть выражена как функция смещения Dk кода задержки приемника, которая может рассматриваться как часть часов приемника. Как указано выше, выражение "широкополосная неоднозначность" понимается как ссылка на множество из n широкополосных неоднозначностей Bw i, соответствующих передатчикам GNSS на борту спутников GNSS в поле зрения пользователя. Получение широкополосной неоднозначности Bw этим способом выполнимо благодаря очень хорошим свойствам комбинации Мельбурна-Вуббена Lw-Pn, в частности ее большим длинам волн и низкому шуму для широкополосного наблюдения Pn кода.
На этапе S307 из наблюдений, полученных на этапе S303, получается вторая линейная комбинация наблюдений. Как и на этапе S305, для каждого передатчика GNSS получается одна такая вторая линейная комбинация наблюдений, полученных на этапе S303. Следует понимать, что первая линейная комбинация и вторая линейная комбинация являются линейно независимыми комбинациями, то есть ни одна не является множителем другой. В общей сложности n вторых линейных комбинаций получаются на этом этапе. Также вторая линейная комбинация наблюдений отличается от свободной от ионосферного влияния комбинации и, таким образом, в значительной степени подвержена влиянию ионосферных задержек. Предпочтительно вторая линейная комбинация имеет длину волны меньше, чем длина волны первой линейной комбинации. В таком случае, вследствие меньшей длины волны ионосферные задержки второй линейной комбинации должны быть приняты во внимание при оценке неоднозначности второй линейной комбинации. В частности, в соответствии с настоящим изобретением вторая линейная комбинация наблюдений задается как LI=L1-L2 и в общем упоминается как ионосферная фаза LI.
На этапе S308 оценивается вторая неоднозначность, имеющая отношение ко второй линейной комбинации наблюдений. Из второй линейной комбинации может быть получена система из n уравнений наблюдения. Посредством применения рекурсивного процесса оценки к системе из n уравнений наблюдения система может быть решена, и неоднозначность второй линейной комбинации наблюдений может быть оценена. В соответствии с настоящим изобретением вторая неоднозначность, которая представляет собой неоднозначность второй линейной комбинации наблюдений, отличается от свободной от ионосферного влияния неоднозначности. Предпочтительно рекурсивный процесс оценки представляет собой фильтр, и более предпочтительно фильтр является фильтром Калмана. В настоящем варианте осуществления, в котором вторая линейная комбинация наблюдений является ионосферной фазой LI, имеется отношение, дающее начало следующей системе из n уравнений наблюдения:

В ней величины Si указывают так называемые ионосферные задержки ионосферных фаз LI i, BI i - ионосферные неоднозначности фазы несущей, и wk - ориентация антенн приемника пользователя. Так называемые наклонные ионосферные задержки Si параметризуют воздействие ионосферных задержек сигналов GNSS, переданных передатчиками GNSS на борту спутников GNSS в поле зрения пользователя на ионосферных фазах LI i.
Числовые выражения для ионосферных задержек вторых линейных комбинаций наблюдений или, эквивалентно, соответствующих коррекций вторых линейных комбинаций наблюдений могут быть получены из ионосферных задержек, определенных на этапе S304.
В настоящем примере ионосферные задержки (наклонные ионосферные задержки) Si ионосферной фазы LI, имеющие отношение к каждому из n GNSS передатчиков, получаются из ионосферных задержек, определенных на этапе S304.
Как и на этапе S306, иллюстративно имеющем отношение к комбинации Мельбурна-Вуббена, на этапе S308 рекурсивный способ оценки, предпочтительно фильтр, более предпочтительно фильтр Калмана, применяется к системе из n уравнений наблюдения, имеющих отношение ко второй линейной комбинации наблюдений, чтобы оценить вторую неоднозначность, имеющую отношение ко второй линейной комбинации наблюдений. В соответствии с настоящим изобретением на этапе S308 система из n уравнений (8) наблюдения решается, чтобы оценить ионосферную неоднозначность BI. Поскольку основная погрешность в уравнении (8), а именно, наклонные ионосферные задержки Si, была точно определена из ионосферной модели, оценка ионосферной неоднозначности BI проходит очень быстро.
При известной первой неоднозначности и второй неоднозначности, имеющих отношение к первой линейной комбинации и второй линейной комбинации, соответственно, может быть вычислена третья неоднозначность, имеющая отношение к произвольной третьей линейной комбинации наблюдений. В приведенном выше примере в соответствии с настоящим изобретением на этапе S309 свободная от ионосферного влияния неоднозначность Bc вычисляется из широкополосной неоднозначности Bw и ионосферной неоднозначности BI через

После получения свободной от ионосферного влияния неоднозначности определение позиции пользователя может продолжиться в соответствии с этапами, известными из традиционной методики PPP. То есть, определение позиции пользователя может продолжиться в соответствии с этапами S1204 и S1205 на фиг. 10. На них получается свободная от ионосферного влияния комбинация наблюдений и применяется рекурсивный процесс оценки, предпочтительно фильтр, более предпочтительно фильтр Калмана, чтобы определить позицию пользователя на основе свободных от ионосферного влияния комбинаций наблюдений LC, PC и свободной от ионосферного влияния неоднозначности Bc, определенных выше. Поскольку свободная от ионосферного влияния неоднозначность Bc уже известна из этапа S309, в соответствии с изобретением определение позиции пользователя из свободной от ионосферного влияния комбинации наблюдений проходит очень быстро.
В кратком изложении описанного выше знание ионосферных задержек наблюдений, полученных из ионосферной модели, позволяет обрабатывать линейные комбинации наблюдений, которые могут не являться свободными от ионосферного влияния и одновременно могут иметь короткую длину волны, и на которые поэтому в значительной степени влияют ионосферные задержки. Ионосферные задержки, полученные из ионосферной модели, используются для коррекции ионосферных задержек наблюдений и/или линейных комбинаций наблюдений. Способность таким образом обрабатывать линейную комбинацию наблюдений, которые не являются свободными от ионосферного влияния, позволяет быстро получать свободную от ионосферного влияния неоднозначность посредством вычитания скорректированной линейной комбинации фазы несущей из свободной от ионосферного влияния фазы несущей, тем самым устраняя узкое место традиционной методики PPP.
Указано, что все сигналы и наблюдения обрабатываются в неразностном режиме. Это означает, что не берутся разности между сигналами, принятыми в приемнике GNSS, и сигналами, принятыми в других приемниках GNSS, или, соответственно, что не берутся разности между наблюдениями, полученными из сигналов, принятых в приемнике GNSS, и наблюдениями, полученными из сигналов, принятых в дополнительном приемнике GNSS. Другими словами, для выполнения способа, описанного на основе фиг. 3, не требуется дополнительный (опорный) приемник GNSS, который передает данные, имеющие отношение к сигналам, принятым в дополнительном приемнике GNSS, и/или данные, имеющие отношение к наблюдениям, полученным из сигналов, принятых в дополнительном приемнике GNSS. Другими словами, для выполнения описанного выше способа, не требуются никакие входные данные кроме сигналов 311 GNSS, принятых в приемнике GNSS, и служебных данных 310.
Таким образом, определение позиции ровера с высокой точностью возможно глобально (на дециметровом уровне ошибки), в любой заданной позиции на Земле и с быстрой сходимостью (после нескольких минут), в частности, в областях, где может быть доступна достаточно точная ионосферная модель (с погрешностью ионосферной задержки приблизительно до нескольких см для L1).
В приведенном выше описании, как поймет специалист в области техники, порядок некоторых этапов может быть изменен. Например, как уже упомянуто, этапы S301 и S302 могут поменяться местами, а также этап S305 вместе с этапом S306 могут поменяться местами с этапом S307 вместе с этапом S308. Также этап S303, на котором наблюдения получаются из спутниковых сигналов, может быть объединен с этапом S305 и/или этапом S307 таким образом, что первые и/или вторые линейные комбинации наблюдений получаются непосредственно из спутниковых сигналов. Кроме того, первые и вторые линейные комбинации наблюдений в приведенном выше описании также могут являться тривиальной комбинацией в том смысле, что линейная комбинация наблюдений может фактически иметь отношение к единственному наблюдению непосредственно.
Устройство для выполнения описанных выше этапов в соответствии с настоящим вариантом осуществления изобретения может содержать все или некоторые из следующих элементов: средство для получения служебных данные, средство для получения сигналов GNSS, средство для получения наблюдений из сигналов GNSS, средство для определения ионосферных задержек сигналов GNSS из ионосферной модели, средство для получения первой линейной комбинации наблюдений, средство для получения второй линейной комбинации наблюдений, средство для применения одного или более рекурсивных процессов оценки, средство для получения свободной от ионосферного влияния линейной комбинации наблюдений и средство для определения позиции пользователя.
Вариант осуществления настоящего изобретения, в котором сигналы двух разных несущих частот принимаются и обрабатываются, чтобы определить позицию пользователя, и в котором служебные данные 410 дополнительно содержат данные смещения фазы спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS, будет описан далее со ссылкой на фиг. 4. Если не заявлено иначе, детали этапов, описанных ниже со ссылкой на фиг. 4, идентичны деталям соответствующих этапов, описанных выше со ссылкой на фиг. 3.
Далее, по аналогии с вариантом осуществления на фиг. 3, следует понимать, что сигналы произвольного количества разных несущих частот могут быть переданы передатчиками GNSS на борту спутников GNSS в поле зрения пользователя, но приемник GNSS на стороне пользователя ограничен приемом сигналов только двух несущих частот. Кроме того, может случиться, что приемник GNSS на стороне пользователя может принять сигналы произвольного количества разных несущих частот, но только сигналы двух разных несущих частот обрабатываются на стороне пользователя.
На этапе S401 принимаются служебные данные 410, которые предпочтительно переданы средством CPF. Предпочтительно средство CPF соответствует поставщику услуг. Служебные данные 410 содержат точные часы спутников (данные часов спутников, указывающие внутренние часы спутников GNSS), точные орбиты спутников (данные орбит спутников, указывающие позиции спутников GNSS), смещения кода задержки спутников (данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS) и ионосферную модель (данные ионосферной модели, указывающие состояние ионосферы) и неоднозначности дробных частей спутников (данные смещения фазы спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS). Неоднозначности дробных частей спутников, например, могут иметь отношение к дробным частям δB1 i и δB2 i соответствующего передатчика GNSS.
Этапы S402-S405 эквивалентны описанным выше этапам S302-S305 на фиг. 3.
На этапе S406 настоящего варианта осуществления первые неоднозначности не только оцениваются, но и фиксируются на своих фактических значениях. В соответствии с изобретением первые неоднозначности, которые являются неоднозначностями первых линейных комбинаций наблюдений, отличаются от свободных от ионосферного влияния неоднозначностей. С этой целью первые неоднозначности первоначально оцениваются таким же образом, как на этапе S306 на фиг. 3. Как было описано со ссылкой на этапа S1204 на фиг. 10, первая неоднозначность Bx i, где X указывает первую линейную комбинацию наблюдений, состоит из целочисленной части λxΝx i, первой дробной части δBx i, имеющей отношение к инструментальным смещениям соответствующего передатчика GNSS, и второй дробной части δBx,k, имеющей отношение к инструментальным смещениям приемника GNSS. В настоящем варианте осуществления изобретения первая дробная часть δBx i, или, соответственно, первые дробные части δB1 i и δB2 i, имеющие отношение к несущим частотам f1 и f2, передаются со служебными данными 410. После того, как первая неоднозначность Bx i была оценена посредством рекурсивного процесса оценки, который является предпочтительно фильтром, и более предпочтительно фильтром Калмана, пользователь может применить следующую зависимость:

В этом уравнении первые дробные части δBx i известны из служебных данных 410. Вторые дробные части δBx,k могут быть получены посредством сравнения первой неоднозначности Bx i, имеющей отношение к разным передатчикам GNSS, или соответственно спутникам GNSS, и может впоследствии быть исключена из множества уравнений (10). Принятие во внимание того, что целочисленные части λxΝx i являются целыми кратными длины волны λx, имеющей отношение к первой линейной комбинации наблюдений, позволяет фактически фиксировать целочисленные части λxΝx i второй неоднозначности Bx i (следует отметить, что эта процедура эквивалентна формированию единственных разностей между спутниками). Более подробно, эта фиксация выполняется посредством оценки неоднозначности Bx i, вычитая первую дробную часть неоднозначности Bx i, принятую со служебными данными 410, и вторую дробную часть неоднозначности δBx,k, полученную выше. Разность затем делится на длину волны λx, и результат деления округляется до ближайшего целого числа, что дает в результате количество полных циклов Νx i. Таким образом, первая неоднозначность Bx i может быть точно определена. Что касается примера варианта осуществления, описанного со ссылкой на фиг. 3, в настоящем варианте осуществления на этапе S406 широкополосная неоднозначность Bw может быть точно определена посредством фиксации ее целочисленной части. Однако следует понимать, что фиксация неоднозначности не обязательно требуется для определения позиции пользователя, но значительно помогает уменьшить время сходимости при определении точной позиции пользователя. Это справедливо потому, что достигается быстрая оценка достаточно точного значения Bc (см. приведенное выше выражение (9) для Bc через Bw и BI) благодаря знанию точного значения Bw.
Этап S407 эквивалентен описанному выше этапу S307 на фиг. 3.
На этапе S408 вторые неоднозначности могут быть фиксированы на их фактических значениях. При этом фиксация вторых неоднозначностей происходит эквивалентно фиксации первых неоднозначностей, как описано со ссылкой на этап S406. В соответствии с настоящим изобретением вторые неоднозначности, которые представляют собой неоднозначности вторых линейных комбинаций наблюдений, отличаются от свободных от ионосферного влияния неоднозначностей. В примере настоящего изобретения на этапе S408 ионосферная неоднозначность BI фиксируется.
После этого способ на фиг. 4 продолжается, как описано выше со ссылкой на фиг. 3. На этапе S409 получается свободная от ионосферного влияния неоднозначность Bc. После этапа S409 способ продолжается в соответствии с этапами S1204-S1205, как описано выше со ссылкой на фиг. 10. На них получается свободная от ионосферного влияния комбинация наблюдений и применяется рекурсивный процесс оценки, предпочтительно фильтр, более предпочтительно фильтр Калмана, чтобы определить позицию пользователя. Поскольку свободная от ионосферного влияния неоднозначность Bc уже известна из этапа S409, определение позиции пользователя из свободной от ионосферного влияния комбинации наблюдений происходит очень быстро.
Основное различие между способом, описанным здесь, и способом, описанным выше со ссылкой на фиг. 3, состоит в том, что в настоящем варианте осуществления первая и/или вторая неоднозначность, соответственно относящаяся к первой и/или второй линейной комбинации наблюдений, может быть определена более точно при известных первых дробных частях δBx i, имеющих отношение к инструментальным смещениям передатчиков GNSS, которые приняты со служебными данными 410. В соответствии с этим точность определенной позиции пользователя в настоящем варианте осуществления дополнительно увеличена относительно предыдущего варианта осуществления: когда неоднозначности фаз фиксируются, пользователь получает аналогичную точность, как после часов использования классического подхода PPP (как проиллюстрировано на фиг. 10). Когда неоднозначности фиксированы, это улучшение сразу же достигается.
Устройство для выполнения описанных выше этапов в соответствии с настоящим вариантом осуществления изобретения в дополнение к некоторым или всем элементам, перечисленным относительно устройства для выполнения этапов в соответствии с предыдущим вариантом осуществления, может содержать средство для фиксирования по меньшей мере одной неоднозначности.
Вариант осуществления настоящего изобретения, в котором принимаются сигналы трех разных несущих частот, обозначенных f1, f2, f3, причем f1>f2>f3 (где f2~f3 имеют очень большую длину волны, например, больше 10 м с E5a и E5b в системе Galileo для сверхширокополосной фазы несущей - см. ниже), будет описан далее со ссылкой на фиг. 5. В нем сигналы произвольного количества разных несущих частот могут быть переданы передатчиками GNSS на борту спутников GNSS в поле зрения пользователя, но приемник GNSS на стороне пользователя может быть ограничен приемом сигналов только трех разных несущих частот. Кроме того, может случиться, что приемник GNSS на стороне пользователя может принять сигналы произвольного количества разных несущих частот, но только сигналы двух разных несущих частот могут быть обработаны на стороне пользователя. Выбранный выше конкретный порядок и обозначение несущих частот не предусматривают ограничения способа изобретения.
Этапы S501-S504 продолжаются на аналогии с предыдущими вариантами осуществления. Однако служебные данные 512 в соответствии с настоящим вариантом осуществления содержат данные смещения задержки кода спутников, имеющие отношение к смещениям задержки кода спутников, которые отличаются от таких данных в соответствии с вариантом осуществления, описанным выше со ссылкой на фиг. 3. Эти различия станут понятны ниже. Кроме того, следует отметить, что служебные данные 512 могут содержать или не содержать данные смещения фазы спутников. Если служебные данные 512 содержат данные смещения фазы спутников, следует понимать, что в дальнейшем на этапах S506, S508 и S510 соответствующие неоднозначности могут быть определены (фиксированы) с учетом соответствующих первых дробных частей неоднозначностей, как описано со ссылкой на этапы S406 и S408 на фиг. 4.
На этапе S505 первые линейные комбинации наблюдений получаются из наблюдений аналогично этапу S305. В соответствии с изобретением первая линейная комбинация не является свободной от ионосферного влияния линейной комбинацией. Предпочтительно первая линейная комбинация этого варианта осуществления имеет максимальную длину волны, доступную для линейной комбинации наблюдений, имеющих отношение к частотам f1, f2, f3. Если сформирована первая линейная комбинация с большой длиной волны, ионосферные задержки не обязательно должны быть приняты во внимание на этом этапе, хотя следует понимать, что ионосферные задержки могут быть приняты во внимание на этом этапе.
Хотя на этапе S505 может быть сформировано много разных линейных комбинаций наблюдений, в соответствии с примером настоящего варианта осуществления изобретения первая линейная комбинация наблюдений предпочтительно является комбинацией Мельбурна-Вуббена Lew i-Pen i сверхширокополосных наблюдений Lew i фазы несущей и сверхузкополосных наблюдений Pen i кода. Сверхширокополосные наблюдения Lew i фазы несущей и сверхузкополосные наблюдения Pen i кода получены из наблюдений, полученных на этапе S503:

На этапе S506 оценивается первая неоднозначность, имеющая отношение к первой линейной комбинации наблюдений. Из первой линейной комбинации может быть получена система из n уравнений наблюдения. Посредством ввода смещений кода задержки, полученных из данных смещения кода задержки, и посредством применения рекурсивного процесса оценки к системе из n уравнений наблюдения система может быть решена, и неоднозначность первой линейной комбинации наблюдений может быть оценена. В соответствии с изобретением первая неоднозначность, которая является неоднозначностью первой линейной комбинации наблюдений, отличается от свободных от ионосферного влияния неоднозначностей, то есть, первая неоднозначность не является свободной от ионосферного влияния. Предпочтительно рекурсивный процесс оценки является фильтром, и более предпочтительно фильтр является фильтром Калмана. На этапе S506 в случае, когда первая комбинация наблюдений является комбинацией Мельбурна-Вуббена Lew i-Pen i, имеется заданное отношение между комбинацией Мельбурна-Вуббена, смещениями  кода задержки спутника, смещениями
кода задержки спутника, смещениями  кода задержки приемника и сверхширокополосной неоднозначностью Bew i, и получается следующая система из n уравнений:
кода задержки приемника и сверхширокополосной неоднозначностью Bew i, и получается следующая система из n уравнений:

В ней длины волн λew=c/(f2-f3), λen=c/(f2+f3), соответственно, и смещения кода задержки спутников (которые отличаются от предыдущих, заданных в случае с двумя частотами f1 и f2) включены в служебные данные 512. Посредством применения рекурсивного процесса оценки, предпочтительно фильтра, более предпочтительно фильтра Калмана, к системе из n уравнений (13) сверхширокополосная неоднозначность Bew может быть выражена как функция задержки кода приемника аналогичным образом, как описано на этапе S306 на фиг. 3. Как обозначено выше, выражение "сверхширокополосная неоднозначность" понимается как множество из n сверхширокополосных неоднозначностей Bew i, соответствующих
передатчикам GNSS на борту спутников GNSS в поле зрения пользователя. Такое получение сверхширокополосной неоднозначности Bew выполнимо благодаря очень хорошим свойствам комбинации Мельбурна-Вуббена Lew-Pen, в частности, ее большой длине волны и низкому шуму для сверхузкополосного наблюдения Pen кода. Кроме того, аналогично этапу S406 на фиг. 4 сверхузкополосная неоднозначность Bew может быть фиксирована на этом этапе.
На этапе S507 вторая линейная комбинация наблюдений получается из наблюдений, полученных на этапе S503. Следует понимать, что первая линейная комбинация и вторая линейная комбинация являются линейно независимыми комбинациями. В соответствии с изобретением также вторая линейная комбинация наблюдений не является свободной от ионосферного влияния комбинацией и, таким образом, в значительной степени подвержена влиянию ионосферных задержек. Предпочтительно вторая линейная комбинация имеет длину волну меньше, чем первая линейная комбинация. В частности, в соответствии с примером настоящего варианта осуществления изобретения вторая линейная комбинация наблюдений представляет собой наблюдение Lw широкополосной фазы несущей.
На этапе S508 вторая неоднозначность, имеющая отношение ко второй линейной комбинации наблюдений, оценивается посредством применения рекурсивного процесса оценки, предпочтительно фильтра, более предпочтительно фильтра Калмана. В соответствии с изобретением вторая неоднозначность, которая является неоднозначностью второй линейной комбинации наблюдений, отличается от свободных от ионосферного влияния неоднозначностей, то есть вторая неоднозначность не является свободной от ионосферного влияния. В настоящем варианте осуществления изобретения разность Lw-Lew между сверхширокополосным и широкополосным наблюдениями фазы несущей можно считать заменителем для разности Bw-Bew широкополосной и сверхширокополосной неоднозначностями плюс уровень ионосферной зависимости. Ионосферная зависимость может быть удалена с использованием ионосферных задержек, определенных на этапе S504. Таким образом, посредством применения рекурсивного процесс оценки, предпочтительно фильтра, более предпочтительно фильтра Калмана, широкополосная неоднозначность Bw может быть определена из сверхширокополосного наблюдения Lew фазы несущей, широкополосного наблюдения Lw фазы несущей и сверхширокополосной неоднозначности Bew. Кроме того, аналогично этапу S406 на фиг. 4, широкополосная неоднозначность Bw может быть фиксирована на этом этапе.
На этапе S509 получается третья линейная комбинация наблюдений. Следует понимать, что первая, вторая и третья линейные комбинации наблюдений являются линейно независимыми. В соответствии с изобретением третья линейная комбинация наблюдений не является свободной от ионосферного влияния. Предпочтительно третья линейная комбинация наблюдений является ионосферной фазой LI. С этого момента процесс продолжается, как от этапа S308 на фиг.3. А именно, на этапе S510 третья неоднозначность оценивается по аналогии со второй неоднозначностью варианта осуществления на фиг. 3, и на ее основе на этапе S511 получается четвертая неоднозначность по аналогии с третьей неоднозначностью варианта осуществления на фиг. 3. В соответствии с изобретением третья неоднозначность, которая является неоднозначностью третьей линейной комбинации наблюдений, отличается от свободных от ионосферного влияния неоднозначностей. В соответствии с настоящим вариантом осуществления изобретения четвертая неоднозначность является свободной от ионосферного влияния неоднозначностью, имеющей отношение к свободной от ионосферного влияния комбинации наблюдений, как задано в уравнении (1). Кроме того, аналогично этапу S406 на фиг. 4 третья и четвертая неоднозначности могут быть фиксированы на этом этапе.
С этого момента определение позиции пользователя может быть продолжено в соответствии с этапами S1204 и S1205 на фиг. 10, как уже описано выше относительно фиг. 3. Получаются свободные от ионосферного влияния комбинации наблюдений Lc и Pc, заданные в уравнениях (1) и (2), и рекурсивный процесс оценки, предпочтительно фильтр, более предпочтительно фильтр Калмана, применяется для определения позиции пользователя. Поскольку свободная от ионосферного влияния неоднозначность Bc уже известна из этапа S511, определение позиции пользователя из свободной от ионосферного влияния комбинации наблюдений происходит очень быстро.
Прием сигналов трех разных несущих частот f1, f2, и f3 дает преимущество более простой оценки сверхширокополосной и широкополосной неоднозначности. Кроме того, на основе вплоть до трех независимо оцененных неоднозначностей Bew, Bw и BI может быть получена независимая точная оценка свободной от ионосферного влияния неоднозначности Bc, что значительно способствует быстрой сходимости и точности определения позиции пользователя. Как правило, время сходимости в случае двух несущих частот (для достижения погрешности на уровне десяти сантиметров), которое обычно составляет несколько минут, может быть уменьшено до определения с единственной эпохой в случае трех несущих частот.
Устройство для выполнения описанных выше этапов в соответствии с настоящим вариантом осуществления изобретения может содержать некоторые или все элементы, перечисленные относительно устройства для выполнения этапов в соответствии с предыдущими вариантами осуществления.
Вариант осуществления, в котором пользователь принимает сигналы единственной несущей частоты, описано на фиг. 6. При этом следует понимать, что сигналы произвольного количества разных несущих частот могут быть переданы передатчиками GNSS на борту спутников GNSS в поле зрения пользователя, но приемник GNSS на стороне пользователя может быть ограничен приемом сигналов только единственной несущей частоты. Кроме того, может случиться, что приемник GNSS на стороне пользователя может принимать сигналы произвольного количества разных несущих частот, но только сигналы единственной несущей частоты могут быть обработаны на стороне пользователя.
На этапе S601, как и в предыдущих вариантах осуществления, служебные данные 607 принимаются пользователем. Служебные данные 607 содержат точные часы спутника, точные орбиты спутника, смещения кода задержки спутника и ионосферную модель. Служебные данные 607 могут дополнительно содержать неоднозначности дробных частей спутника.
На этапе S602 сигналы 608 спутника единственной несущей частоты принимаются приемником GNSS пользователя. Следует снова отметить, что этапы S601 и S602 могут поменяться местами.
На этапе S603 наблюдения получаются из спутниковых сигналов. В частном случае приемника с единственной частотой может быть получено n наблюдений Li фазы несущей и/или n наблюдений Pi кода. Следует понимать, что на этом этапе могут быть получены либо все возможные наблюдения, либо только те наблюдения, которые требуются для использования на последующих этапах. Также следует понимать, что аналогично предыдущим вариантам осуществления линейные комбинации, которые получаются из наблюдений, могут быть получены непосредственно из сигналов, то есть этапы получения наблюдений из спутниковых сигналов и получения линейных комбинаций наблюдений могут быть объединены в один этап.
На этапе S604 ионосферная задержка, имеющая отношение к линейной комбинации наблюдений, определяется из ионосферной модели таким же образом, как в предыдущих вариантах осуществления. При этом сначала могут быть определены ионосферные задержки, имеющие отношение к наблюдениям, и затем могут быть определены ионосферные задержки, имеющие отношение к линейной комбинации наблюдений. Однако ионосферная задержка, имеющая отношение к линейной комбинации наблюдений, может быть определена непосредственно из ионосферной модели. Как имело место в предыдущих вариантах осуществления, ионосферная модель может содержать данные надежности, указывающие зависящую от позиции надежность (точность) ионосферной модели. В случае, когда ионосферная модель снабжена данными надежности, может быть определена точность ионосферных задержек, определенных из ионосферной модели. На последующих этапах, при выполнении оценки фильтра может быть принята во внимание точность ионосферных задержек, определенных из ионосферной модели.
На этапе S605 получается линейная комбинация наблюдений. Как и в предыдущих вариантах осуществления, линейная комбинация наблюдений может являться тривиальной комбинацией, и, таким образом, иметь отношение непосредственно к наблюдениям. Предпочтительно линейная комбинация наблюдений в соответствии с настоящим изобретением включает в себя наблюдение L фазы несущей.
На этапе S606 применяется рекурсивный процесс оценки, предпочтительно фильтр, более предпочтительно фильтр Калмана, для определения позиции пользователя из линейной комбинации наблюдений. С этой целью получается множество уравнений наблюдения, имеющих отношение к линейной комбинации наблюдений. Ионосферные задержки, полученные на предыдущем этапе, могут использоваться для коррекции воздействия ионосферной задержки линейной комбинации наблюдений. Кроме того, поскольку часы спутника обычно имеют отношение к периоду времени свободной от ионосферного влияния линейной комбинации, смещения кода задержки спутников, принятые со служебными данными 607, могут использоваться для определения часов спутника, имеющих отношение к сигналу единственной частоты. Полученная система уравнений наблюдения затем решается посредством применения рекурсивного процесса оценки.
Как правило, при использовании приемников с единственной частотой невозможно получить ни свободную от ионосферного влияния линейную комбинацию наблюдений фазы несущей, ни свободную от ионосферного влияния и свободную от геометрии комбинацию, такую как комбинация Мельбурна-Вуббена. Таким образом, поскольку в традиционных приемниках с единственной частотой оценка неоднозначностей фазы несущей требует существенного количества времени, традиционные приемники с единственной частотой выполняют определение позиции исключительно на основе наблюдений Pi кода (скорректированных с помощью простой модели ионосферной задержки, такой как, например, ионосферная модель коррекции Клобухара). В соответствии с этим точность определенной позиции является низкой, обычно порядка нескольких метров, и зависит, в частности от качества ионосферной модели коррекции. В настоящем варианте осуществления изобретения обеспечение служебных данных 607 (с точными орбитами спутников и точными часами спутников) позволяет далее рассматривать наблюдения Li фазы несущей и линейные комбинации наблюдений кода и наблюдений фазы несущей. В частности, определение ионосферных задержек наблюдений позволяет смягчать эффекты ионосферных задержек и определять позицию пользователя более точно (менее 1 метра с помощью достаточно точной модели ионосферной задержки, то есть, с погрешностью ионосферной задержки приблизительно до нескольких см для L1).
Описанные выше способы вариантов осуществления настоящего изобретения могут быть модифицированы посредством одновременного приема и обработки сигналов GNSS от двух или более спутниковых систем (совокупностей), таких как GPS, Galileo, GLONASS и т.п. Тем самым могут быть улучшены и времена сходимости, и точности позиции. В таких случаях следует понимать, что служебные данные содержат описанные выше элементы для каждой совокупности. Например, в случае, когда приняты сигналы от спутников GPS и Galileo, часы спутников для спутников GPS и часы спутников для спутников Galileo должны быть снабжены служебными данными.
Для способов на стороне пользователя описанных выше вариантов осуществления настоящего изобретения необходимо обеспечение для пользователя точных часов, точных орбит, смещений кода задержки спутников, ионосферной модели и факультативно фазовых смещений спутников.
Далее определение элементов служебных данных, таких как ионосферная модель, будет описано со ссылкой на фиг. 7 и фиг. 8.
Фиг. 7 показывает карту мира, иллюстративно указывающую позиции множества стационарных наземных станций, каждая из которых включает в себя по меньшей мере один приемник GNSS. Каждая из этих стационарных наземных станций дополнительно имеет средство передачи и/или приема для обмена данными друг с другом. Эта передача данных, например, может например проводиться через проводные, беспроводные или другие средства связи, которые могут быть известны специалисту в области техники. В соответствии с этим множество стационарных наземных станций формируют сеть стационарных наземных станций. Среди множества стационарных наземных станций имеется по меньшей мере одно средство CPF или первая станция, в то время как остальные стационарные наземные станции называются вторыми станциями. Как видно из иллюстративной карты, расстояния между соседними стационарными наземными станциями могут варьировать от нескольких сотен километров до нескольких тысяч километров.
Каждая из вторых станций принимает сигналы, переданные передатчиками GNSS на борту нескольких спутников GNSS в поле зрения соответствующей второй станции. Каждая вторая станция затем передает соответствующие данные наблюдения по меньшей мере одному средству CPF. Этот обмен данными наблюдения может быть выполнен с использованием формата независимого от приемника обмена (RINEX) (или любого другого формата или средства вещания, подходящего для применения в реальном времени), посредством которого необработанные данные GNSS, принятые вторыми станциями, передаются по меньшей мере одному средству CPF. По меньшей мере в одном средстве CPF данные наблюдения, принятые от множества вторых станций, обрабатываются, чтобы получить ионосферную модель. Способ доставки ионосферной модели с использованием сети регионального уровня стационарных наземных станций, имеющих приемники GNSS и находящихся в контакте со средством CPF, известен, например, из патента США 2006/0164297 A1. Из сигналов GNSS, принятых в каждой второй станции, которые были переданы передатчиками GNSS на борту нескольких спутников GNSS в поле зрения второй станции, может быть определена ионосферная задержка каждого сигнала GNSS. Это может быть сделано посредством применения рекурсивного процесса оценки, предпочтительно фильтра, более предпочтительно фильтр Калмана, к системе уравнений наблюдения, выведенных из сигналов GNSS. Из ионосферных задержек сигналов GNSS для каждого принятого сигнала GNSS может быть определено интегрированное содержание свободных электронов вдоль линии видимости между приемником GNSS, принимающим сигнал, и передатчиком GNSS на борту спутника GNSS, передающего сигнал, или содержание свободных электронов в цилиндре, выровненном с линией видимости и имеющем площадь поперечного сечения, например, один квадратный метр (м2). Отсюда получается ионосферная модель, указывающая разрешенное относительно позиции полное содержание свободных электронов ионосферы или, соответственно, разрешенную относительно позиции плотность свободных электронов в ионосфере. В соответствии с настоящим изобретением модель может указывать плотность свободных электронов для множества ячеек объема заранее заданного размера в пределах ионосферы. Например, ионосфера может быть подразделена на множество ячеек объема или "вокселов", расположенных на нескольких слоях, окружающих Землю, и ионосферная модель может содержать общее количество свободных электронов или, соответственно, плотность свободных электронов для каждой ячейки объема. Кроме того, зависящая от позиции функция плотности, указывающая плотность свободных электронов в ионосфере, может быть разложена во множество функций, таких как эмпирические ортогональные функции, сферические гармоники или профили Чепмена, и модель ионосферы может содержать коэффициенты этих функций. Следует понимать, что перечисление этих функций имеет лишь иллюстративную природу, и специалист в области техники понимает, что для подразделения ионосферы также могут использоваться другие функции кроме упомянутых выше функций.
Традиционный способ, раскрытый в патенте США 2006/0164297 A1, применяется к навигационным системам регионального уровня. Способ изобретения для получения служебных данных, с другой стороны, адаптирован к описанной выше глобальной навигационной методике и глобальной сети стационарных наземных станций. Кроме того, способ изобретения для получения ионосферной модели из данных наблюдения, полученных во вторых станциях, задуман для работы в реальном времени, и данные наблюдения обрабатываются в неразностном режиме по меньшей мере одним средством CPF. Неоднозначности фазы несущей, с другой стороны, обрабатываются также в режиме с двойной разностью таким образом, что неоднозначности фазы несущей становятся целочисленными величинами. Кроме того, в соответствии со способом изобретения не только ионосферная модель, но и все элементы служебных данных, такие как точные часы спутников, точные орбиты спутников, смещения кода задержки спутников, смещения фаз спутников и ионосферная модель, могут быть получены тем же самым по меньшей мере одним средством CPF, соответствующим сети вторых станций. То есть, по меньшей мере одно средство CPF может быть выполнено с возможностью обеспечивать все элементы служебных данных пользователю согласованным образом. Чтобы обеспечить такие служебные данные, должно быть реализовано много модификаций относительно традиционных способов. Эти модификации будут описаны ниже.
Во-первых, известно, что спутники GNSS в затмении представляют большие ошибки в своих предсказанных позициях. На предшествующем уровне техники, имеющем отношение к сети регионального уровня стационарных наземных станций, эффект таких ошибок довольно ограничен. Однако в глобальном масштабе эти ошибки, в частности, в случае ошибок позиции в периферическом направлении относительно Земли, становятся важными. В соответствии с этим по меньшей мере одно средство CPF в соответствии с настоящим изобретением может содержать модуль для обнаружения спутников в затмении. Кроме того, по меньшей мере одно средство CPF может быть выполнено с возможностью обнаруживать спутники, которые не находятся в затмении, но однако имеют большие ошибки в своей предсказанной позиции или предсказанной орбите. В соответствии с этим по меньшей мере одно средство CPF содержит модуль для обнаружения спутников с большими ошибками в их предсказанных орбитах.
Кроме того, при обработке данных, полученных из сети глобального масштаба стационарных станций, становится необходимым корректировать входные орбиты, которые, например, получены из центра управления GPS или центра управления Galileo. В соответствии с настоящим изобретением, орбиты могут быть скорректированы посредством модели возмущения орбиты на основе аналитических решений динамических уравнений Хилла с ослабленными ограничениями. В соответствии с этим по меньшей мере одно средство CPF может содержать модуль для коррекции входных орбит спутников.
Поскольку неоднозначности фазы несущей обрабатываются также в режиме с двойной разностью, опорные приемники (или, соответственно, опорные наземные станции) и опорные передатчики (или, соответственно, опорные спутники) должны быть определены. При работе с сетью регионального уровня стационарных наземных станций, в которой большую часть времени все рассматриваемые спутники GNSS находятся в общем поле зрения всех стационарных станций, достаточно определить одну опорную станцию и один опорный спутник. Однако в глобальном масштабе должны быть определены более одного опорного спутника и более одной опорной станции. В соответствии с этим по меньшей мере одно средство CPF может содержать модуль для выбора опорных приемников и/или модуль для выбора опорных спутников.
В описанном выше навигационном способе изобретения служебные данные предпочтительно содержат данные смещения фазы спутников. Получение этих данных смещения фаз спутников, имеющих отношение к дробной части неоднозначностей спутников, требует выделенного процесса фильтрации, обрабатывающего данные наблюдения и промежуточные данные, полученные посредством предварительной обработки данных наблюдений. В соответствии с этим по меньшей мере одно средство CPF содержит модуль для оценки дробной части неоднозначностей (модуль вычисления дробных неоднозначностей).
Наконец, раскрытый выше навигационный способ изобретения, требует знания точных часов спутников, и способ изобретения для доставки остальных элементов служебных данных требует знания точных часов приемника (внутренних часов вторых станций). При этом точные часы спутников должны обновляться в ровере в очень кратковременных интервалах, обычно один раз в каждую эпоху. Поскольку процессы фильтрации, используемые для доставки, например, ионосферной модели происходят в масштабах времени порядка нескольких минут, требуется выделенный быстрый процесс фильтрации для вычисления точных часов спутника и точные часы приемника. В соответствии с этим по меньшей мере одно средство CPF может содержать в дополнение к медленному фильтру также быстрый фильтр с масштабом времени порядка приблизительно секунд.
Фиг. 8 схематично показывает расположение центрального средства обработки. Препроцессор 803 снабжается данными 801 наблюдения, полученными во вторых станциях, и точными орбитами 802, предсказанными блоком 810 предсказания орбит. Препроцессор 803 содержит модуль для обнаружения спутников в затмении и далее обнаруживает, произошел ли срыв слежения, и выполняет моделирование, относящееся к данным 801 наблюдения, полученным во вторых станциях. Выходная информация препроцессора 803 подается на медленный фильтр 804 и быстрый фильтр 805. В медленном фильтре 804 определяются свободные от ионосферного влияния неоднозначности Bc и ионосферные неоднозначности BI, имеющие отношение к данным наблюдения, тропосферные коррекции, имеющие отношение к данным наблюдения, коэффициенты Хилла для коррекции орбит спутников (или любое другое множество параметров коррекции орбиты), точные часы приемника, точные часы спутника, смещения кода задержки спутника, смещения кода задержки приемника и ионосферная модель. Выходная информация медленного фильтра 804 затем подается на модуль 806 вычисления дробных неоднозначностей, и быстрый фильтр 805, в то время как ионосферная модель 807 подается на генератор 808 сообщений. В модуле 806 вычисления дробных неоднозначностей смещения фазы несущей спутника или, соответственно, дробная часть неоднозначностей спутника оценивается посредством процесса фильтрации, основанного на выходной информации медленного фильтра 804. В быстром фильтре 805 точные часы приемника и точные часы спутника оцениваются посредством процесса фильтрации, основанного на выходной информации медленного фильтра 804. Выходная информация быстрого фильтра 805 затем подается на блок 819 предсказания орбит, предсказывающий точные орбиты для последующего использования, и на генератор 808 сообщения. Выходная информация модуля 806 вычисления дробных неоднозначностей подается на генератор 808 сообщений. На основе входной информации, принятой от медленного фильтра 804, быстрого фильтра 805 и модуля 806 вычисления дробных неоднозначностей, генератор сообщений формирует служебные данные 809, содержащие данные часов спутников, указывающие внутренние часы спутников, данные орбит спутников, указывающие позиции спутников, данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS, и данные ионосферной модели, указывающие состояние ионосферы, и передает служебные данные 809 пользователю.
Поскольку разные элементы служебных данных 809 изменяются на разных масштабах времени, они могут быть переданы средством CPF с разными временными интервалами, создавая разные частоты обновления на пользовательской стороне. Например, точность часов спутников, поддерживаемых на пользовательской стороне, быстро ухудшается в отсутствие новой входной информации, в то время как состояние ионосферы обычно изменяется в масштабе времени порядка часов или по меньшей мере десятков минут. В соответствии с этим часы спутников могут передаваться с самой высокой частотой обновления, предпочтительно в каждой эпохе, орбиты спутников могут передаваться с уменьшенной частотой обновления, предпочтительно каждые несколько минут, смещения кода задержки спутников и дробные части неоднозначности спутников могут передаваться с еще более уменьшенной частотой обновления, предпочтительно каждые несколько минут, и ионосферная модель может передаваться также с низкой частотой обновления порядка нескольких минут.
Фиг. 9 схематично иллюстрирует устройство для определения позиции ровера с использованием способа изобретения. Номер 905 указывает средство для приема сигналов, которые передаются передатчиками GNSS на борту заданного количества спутников, расположенных в поле зрения устройства, номер 910 указывает средство для обновления служебных данных, служебные данные содержат данные часов спутников, указывающие внутренние часы спутников, данные орбит спутников, указывающие позиции спутников, данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS, и данные ионосферной модели, указывающие состояние ионосферы, номер 915 указывает средство для определения на основе данных ионосферной модели данных ионосферной задержки, указывающих, коррекции, имеющие отношение к задержкам сигналов, задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS и приемом сигналов средством для приема сигналов, и номер 920 указывает средство для определения позиции устройства на основе сигналов, данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников и данных ионосферной задержки.
Выше были описаны предпочтительные варианты осуществления настоящего изобретения. Признаки, компоненты и конкретные детали описанных выше аспектов изобретения могут быть заменены или объединены для формирования дополнительных аспектов, оптимизированных для соответствующего применения. Поскольку эти модификации хорошо понятны специалистам в области техники, для ясности они должны быть неявно раскрыты настоящим описанием без явного определения каждой возможной комбинации. Кроме того, следует отметить, что описанные выше этапы способа и средства устройства могут быть реализованы посредством аппаратных средств, программного обеспечения или их комбинации.
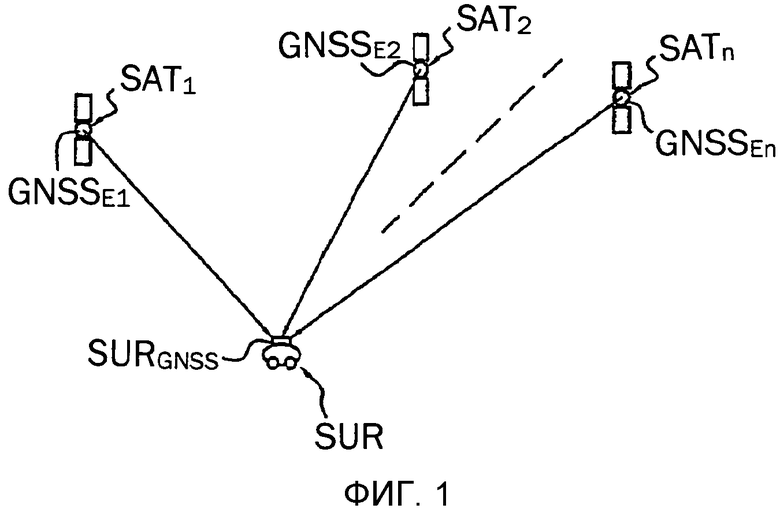
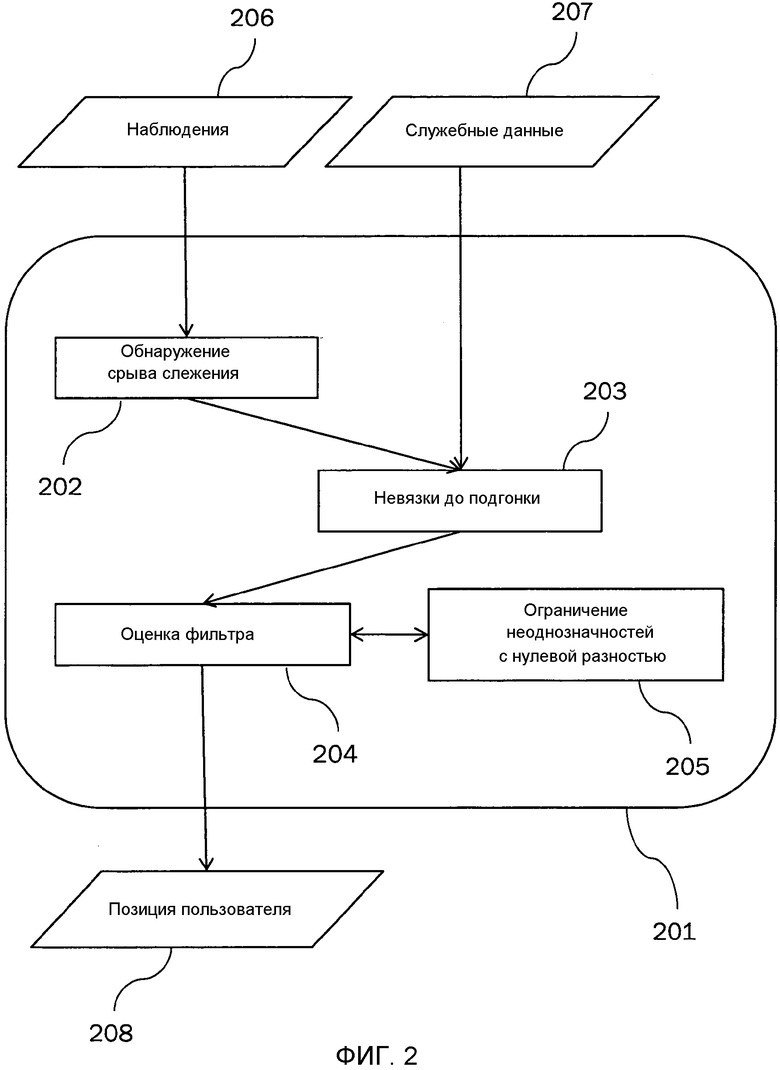
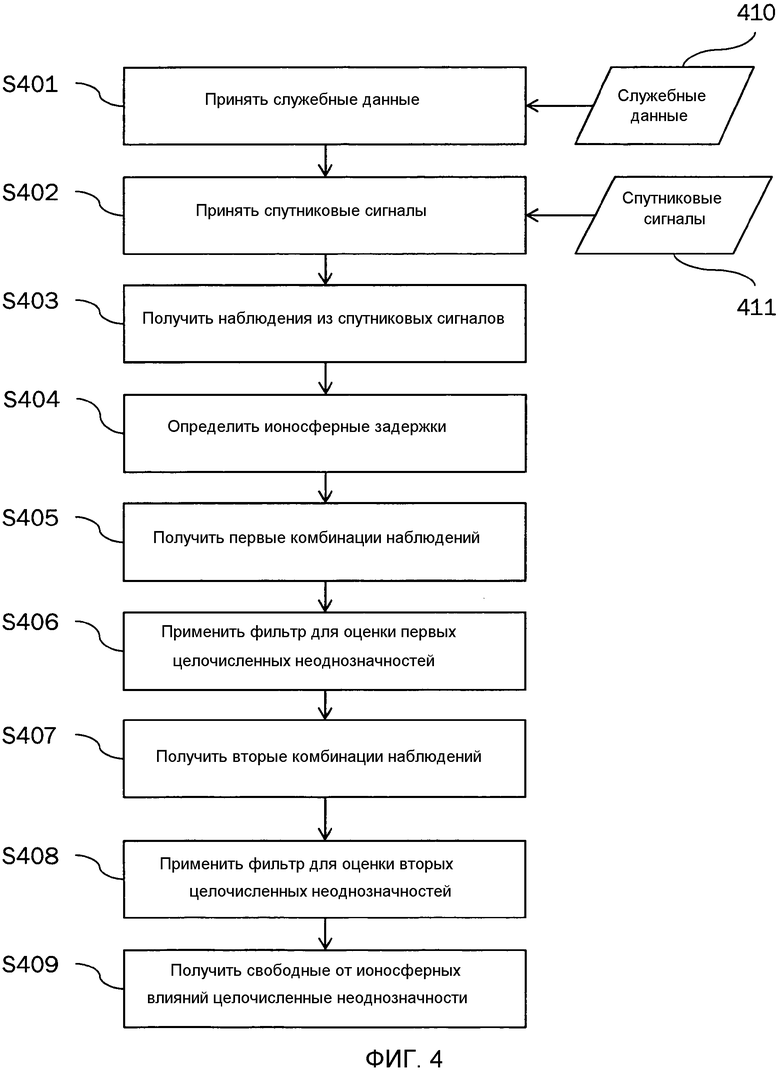
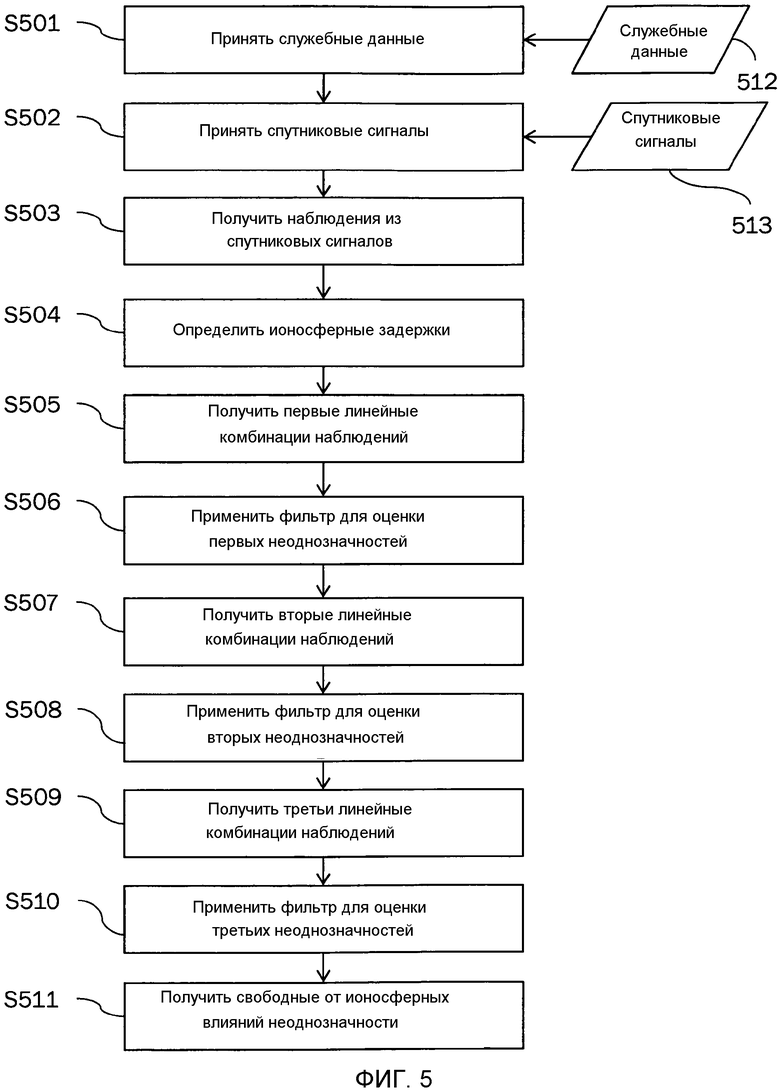


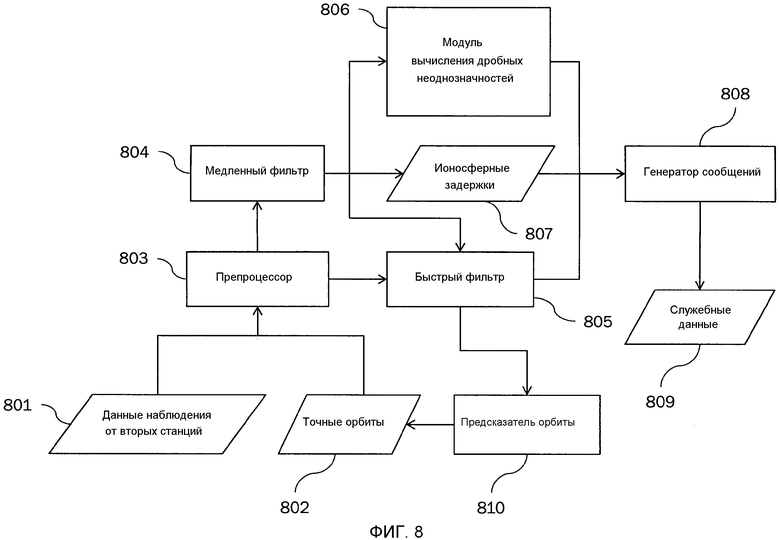
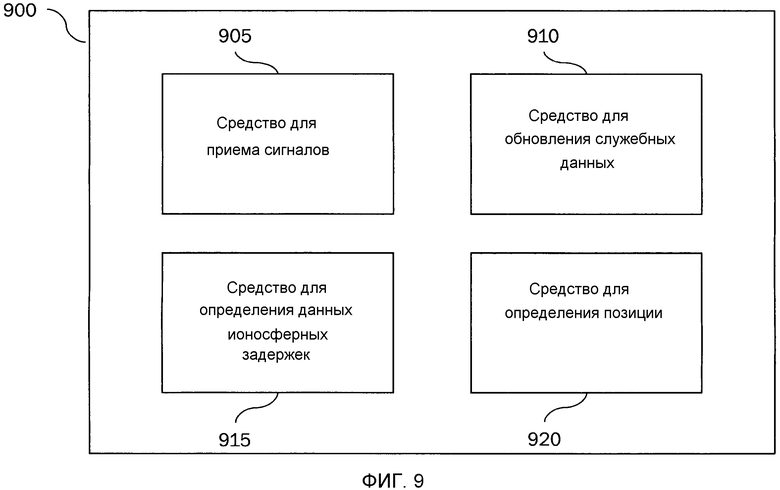
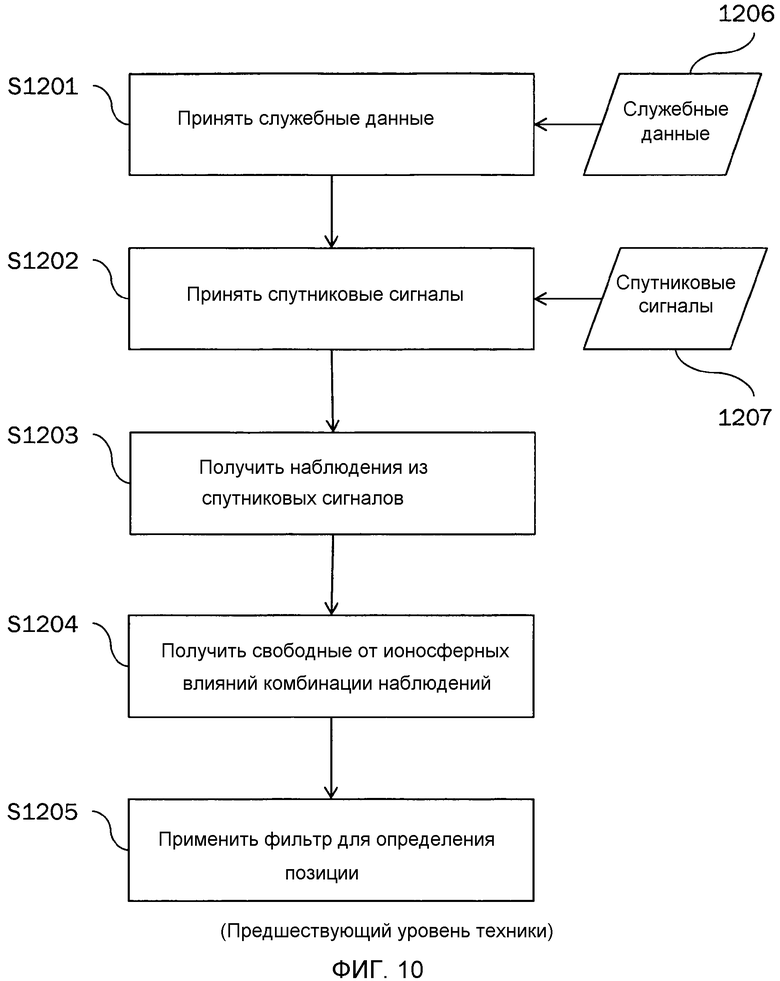
Изобретение относится к технике связи и может использоваться в глобальной навигационной спутниковой системе (GNSS). Технический результат состоит в повышении точности определения местоположения объектов. Для этого принимают приемником GNSS сигналы, которые переданы передатчиками GNSS, расположенными на борту спутников, которые расположены в поле зрения объекта; обновляют служебные данные в объекте, причем служебные данные включают в себя данные часов спутников, указывающие внутренние часы спутников, данные орбит спутников, указывающие позиции спутников, данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS, и данные ионосферной модели, указывающие состояние ионосферы; определяют на основе данных ионосферной модели данные ионосферных задержек, указывающие коррекции, имеющие отношение к задержкам сигналов; причем задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS и приемом сигналов приемником GNSS; и определяют позицию объекта на основе сигналов, данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников и определенных данных ионосферных задержек. 3 н. и 9 з.п. ф-лы, 10 ил.
1. Способ определения позиции объекта, имеющего приемник глобальной навигационной спутниковой системы (GNSS), причем способ содержит этапы, на которых:
- принимают приемником GNSS сигналы, которые переданы передатчиками GNSS (GNSSE1-GNSSEn), расположенными на борту спутников (SAT1-SATn), которые расположены в поле зрения объекта;
- обновляют служебные данные в объекте, причем служебные данные обеспечиваются поставщиком услуг GNSS и включают в себя:
данные часов спутников, указывающие внутренние часы спутников (SAT1-SATn);
данные орбит спутников, указывающие позиции спутников (SAT1-SATn);
данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS (GNSSE1-GNSSEn); и
данные ионосферной модели, указывающие состояние ионосферы,
- определяют на основе данных ионосферной модели данные ионосферных задержек, указывающие коррекции, имеющие отношение к задержкам сигналов, причем задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS (GNSSE1-GNSSEn) и приемом сигналов приемником GNSS (SURGNSS);
- получают данные наблюдения кода из сигналов, причем данные наблюдения кода имеют отношение к данным, переданным с сигналами, и содержат наблюдения кода, имеющие отношение к данным, переданным с сигналами;
- получают данные наблюдения фазы несущей из сигналов, причем данные наблюдения фазы несущей имеют отношение к фазам несущей сигналов и содержат наблюдения фазы несущей, имеющие отношение к фазе несущей сигналов; и
- определяют позицию объекта на основе данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников, определенных данных ионосферных задержек, данных наблюдения кода, полученных из сигналов, и данных наблюдения фазы несущей, полученных из сигналов,
причем все наблюдения кода и все наблюдения фазы несущей, включенные в этап определения позиции объекта, обрабатываются в неразностном режиме;
на этапе определения позиции объекта обрабатывают по меньшей мере одну линейную комбинацию наблюдений, которая не является свободной от ионосферного влияния, и дополнительно линейную комбинацию наблюдений, которая является свободной от ионосферного влияния;
на этапе определения позиции объекта данные ионосферных задержек используют для корректировки ионосферных задержек по меньшей мере одной линейной комбинации наблюдений, которая не является свободной от ионосферного влияния.
2. Способ по п. 1, дополнительно содержащий по меньшей мере один из этапов, на которых:
- определяют ионосферную задержку наблюдения кода;
- определяют ионосферную задержку наблюдения фазы несущей;
- определяют ионосферную задержку свободной от геометрии комбинации наблюдений кода; и
- определяют ионосферную задержку свободной от геометрии комбинации наблюдений фазы несущей.
3. Способ по п. 1, в котором служебные данные дополнительно содержат данные смещения фаз спутников, имеющие отношение к смещениям фазы несущей передатчиков GNSS (GNSSE1-GNSSEn), и
этап определения позиции объекта дополнительно содержит этап определения данных неоднозначности фазы несущей, указывающих по меньшей мере для одного сигнала количество полных циклов, содержащихся в разности фаз между фазой несущей сигнала в момент передачи и фазой несущей сигнала в момент приема, на основе данных наблюдения фазы несущей и данных смещения фазы спутников.
4. Способ по любому из пп. 1-3, в котором на этапе определения позиции объекта выполняют по меньшей мере один рекурсивный процесс оценки.
5. Способ по п. 4, в котором на каждом этапе по меньшей мере одного рекурсивного процесса оценки данные состояния, содержащие по меньшей мере один элемент множества, состоящего из позиции объекта и данных неоднозначности фазы несущей, оценивают на основе сигналов, данных часов спутников, данных орбит спутников, данных ионосферной задержки и оценки данных состояния, оцененных на предыдущем этапе.
6. Способ по любому из пп. 1-3, в котором данные ионосферной модели содержат данные надежности ионосферной модели, имеющие отношение к зависящей от позиции надежности данных ионосферной модели, и этап определения позиции объекта дополнительно основан на данных надежности ионосферной модели.
7. Способ по любому из пп. 1-3, в котором:
по меньшей мере одна стационарная наземная станция служит в качестве центрального средства обработки,
множество стационарных наземных станций, каждая из которых имеет приемник GNSS, служит в качестве сетевых станций,
по меньшей мере одно центральное средство обработки и множество сетевых станций формируют сеть,
служебные данные получаются сетью и передаются объекту, и
получение данных ионосферной модели содержит этапы, на которых:
- принимают в сетевых станциях сигналы по меньшей мере двух разных частот, переданные передатчиками GNSS, расположенными на борту множества спутников, расположенных в поле зрения по меньшей мере одной из сетевых станций;
- определяют сетевые данные ионосферных задержек, указывающие коррекции, имеющие отношение к задержкам сигналов, принятых в сетевых станциях, причем задержки сигналов, принятых в сетевых станциях, получаются в результате прохождения сигналов, принятых в сетевых станциях, через ионосферу; и
- определяют данные ионосферной модели от сетевых данных ионосферных задержек.
8. Способ по п. 7, в котором определение данных ионосферной модели дополнительно содержит этапы, на которых:
- разлагают количественную плотность свободных электронов в ионосфере во множество функций; и
- оценивают данные содержания электронов, указывающие коэффициенты множества функций, на основе сетевых данных ионосферных задержек.
9. Способ по п. 7, в котором геодезические данные, имеющие отношение по меньшей мере к одному элементу множества, состоящего из внутренних часов множества спутников, позиций множества спутников, смещений кода задержки передатчиков GNSS на борту множества спутников и смещений фазы несущей передатчиков GNSS на борту множества спутников и ионосферных данных, имеющих отношение к состоянию ионосферы, обрабатывают одновременно первым процессом оценки и вторым процессом оценки, первый и второй процессы оценки имеют разные скорости обработки и взаимодействуют друг с другом.
10. Способ по любому из пп. 1-3, в котором частота обновления часов спутников, частота обновления данных орбит спутников и частота обновления ионосферной модели, соответственно указывающие частоту, с которой данные часов спутников постоянно обновляются в объекте, частоту, с которой данные орбит спутников постоянно обновляются в объекте, и частоту, с которой данные ионосферной модели постоянно обновляются в объекте, выбраны таким образом, что частота обновления данных часов спутников больше частоты обновления данных орбит спутников, и частота обновления данных часов спутников больше частоты обновления данных ионосферной модели.
11. Устройство для определения позиции, причем устройство содержит:
- средство для приема сигналов (905), которые переданы передатчиками GNSS (GNSSE1-GNSSEn) на борту заданного количества спутников (SAT1-SATn), расположенных в поле зрения устройства;
- средство для обновления служебных данных (910), причем служебные данные обеспечиваются поставщиком услуг GNSS и включают в себя:
данные часов спутников, указывающие внутренние часы спутников (SAT1-SATn);
данные орбит спутников, указывающие позиции спутников (SAT1-SATn);
данные смещения кода задержки спутников, имеющие отношение к смещениям кода задержки передатчиков GNSS (GNSSE1-GNSSEn); и
данные ионосферной модели, указывающие состояние ионосферы;
- средство для определения (915) на основе данных ионосферной модели данных ионосферных задержек, указывающих коррекции, имеющие отношение к задержкам сигналов; причем задержки сигналов происходят в результате прохождения сигналов через ионосферу между передачей сигналов от передатчиков GNSS (GNSSE1-GNSSEn) и приемом сигналов средством для приема сигналов (905);
- средство для получения данных наблюдения кода из сигналов, причем данные наблюдения кода имеют отношение к данным, переданным с сигналами, и содержат наблюдения кода, имеющие отношение к данным, переданным с сигналами;
- средство для получения данных наблюдения фазы несущей из сигналов, причем данные наблюдения фазы несущей имеют отношение к фазам несущей сигналов и содержат наблюдения фазы несущей, имеющие отношение к фазе несущей сигналов; и
- средство для определения позиции (920) устройства на основе данных часов спутников, данных орбит спутников, данных смещения кода задержки спутников, определенных данных ионосферных задержек, данных наблюдения кода, полученных из сигналов, и данных наблюдения фазы несущей, полученных из сигналов, причем средство для определения позиции (920) выполнено с возможностью обрабатывать все наблюдения кода и все наблюдения фазы несущей в неразностном режиме;
средство для определения позиции (920) дополнительно выполнено с возможностью обрабатывать по меньшей мере одну линейную комбинацию наблюдений, которая не является свободной от ионосферного влияния, и дополнительно линейную комбинацию наблюдений, которая является свободной от ионосферного влияния; и
средство для определения позиции (920) дополнительно выполнено с возможностью использовать данные ионосферных задержек для корректировки ионосферных задержек по меньшей мере одной линейной комбинации наблюдений, которая не является свободной от ионосферного влияния.
12. Система для определения позиции, содержащая устройство по п. 11 и сеть, сформированную по меньшей мере одним центральным средством обработки, которое является стационарной наземной станцией, и множеством сетевых станций, которые являются стационарными наземными станциями и каждая из которых имеет приемник GNSS, в которой
по меньшей мере одно центральное средство обработки и множество сетевых станций формируют сеть,
служебные данные получаются сетью и передаются устройству.
| WO2008105778 A, 04.09.2008 | |||
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| US6252545 B1, 26.06.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

