Изобретение относится к железнодорожному транспорту и предназначено для использования в электровозах постоянного тока, в частности ВЛ10 и ВЛ11, в том числе включенных по системе многих единиц.
Известно устройство для защиты от боксования и юза колесных пар электроподвижного состава [1], содержащее датчики, пороговые элементы, задатчик тока тяговых двигателей, систему автоматического управления электроподвижным составом и блок управления работой песочниц. Недостатком данного устройства является его сложность и негибкий алгоритм работы устройства.
Известен способ [2] регулирования приводного и/или тормозного усилия колес единицы подвижного состава до оптимальной силы сцепления при минимально возможном проскальзывании. Основным недостатком данного способа является постоянное проскальзывание одной или нескольких колесных пар, что приводит к ускоренному износу бандажей колес и самих рельс.
Наиболее близким является устройство защиты от боксования [3], в котором шунтирующие резисторы обмоток ТЭД включены постоянно на сериесном соединении двигателей. Основным недостатком устройства является повышенный расход электроэнергии.
Для улучшения энергетических характеристик, а также полной автоматизации процесса управления в устройство вводятся микропроцессорный блок, датчики температуры тягового электродвигателя (ТЭД), датчик позиции контроллера машиниста, блок управления контакторами, блок управления форсунками песка и шаговый двигатель, соединенный с контроллером машиниста.
Известно [4], что при скорости скольжения, составляющей от 7% до 15% от абсолютной скорости, коэффициент сцепления колес с рельсами увеличивается на 35…50% и может достигать значений до 0,3. При этом, управляя жесткостью характеристик тяговых электродвигателей (ТЭД) за счет шунтирования их обмоток резисторами, можно добиться самопрекращающегося процесса боксования, а следовательно, процесс боксования будет самопрекращаться.
На чертеже показан вариант микропроцессорной системы защиты от боксования.
На первый вход микропроцессорного блока 1 поступает сигнал с датчика 8 позиции контроллера машиниста 2, соединенного с шаговым двигателем 11. Ко второму и третьему входам микропроцессорного блока 1 подключены выходы штатных реле боксования 3 и 4. К четвертому и пятому входам подключаются выходы датчика температуры 5 первого ТЭД и датчика температуры 6 второго ТЭД. Первый выход микропроцессорного блока 1 соединен с шаговым двигателем 11. Второй, третий, четвертый и пятый выходы соединены соответственно с первым, вторым, третьим и четвертым входами блока управления контакторами 9. Шестой выход соединен с блоком управления форсунками песка 10. Первый, второй, третий и четвертый выходы блока управления контакторами 9 соединены соответственно с первым контактором 121, вторым контактором 122, третьим контактором 123 и четвертым контактором 124. Первый контактор 121, второй контактор 122, первое шунтирующее сопротивление 131, второе шунтирующее сопротивление 132 и пятое шунтирующее сопротивление 135 составляют шунтирующий контур первого тягового электродвигателя 141. Третий контактор 123, четвертый контактор 124, третье шунтирующее сопротивление 133, четвертое шунтирующее сопротивление 134 и пятое шунтирующее сопротивление 135 составляют шунтирующий контур второго тягового электродвигателя 142.
Микропроцессорная система работает следующим образом. При возникновении боксования сигналы со штатных реле боксования 3 и 4 поступают на соответственно второй и третий входы микропроцессорного блока 1, где происходит их обработка. Если в случае боксования напряжение, поступающее с реле боксования 3 или реле боксования 4, превышает напряжение уставки UУСТ1, то происходит опрос датчика 8 позиции контроллера машиниста 2. В зависимости от положения контроллера машиниста 2 микропроцессорная система работает в трех режимах:
1. При сериесном соединении двигателей (позиции контроллера машиниста 11 с 1 по 8) система вырабатывает сигналы управления, поступающие на блок управления контакторами 9, который включает контакторы 121 и 124, а через время t1, если боксование не прекратилось, - контакторы 122 и 123. После прекращения боксования контакторы 121…124 выключаются.
2. При сериесном соединении двигателей (позиции контроллера машиниста 11 с 9 по 16) система вырабатывает сигналы управления, поступающие на блок управления контакторами 9, который включает контакторы 121 и 124. После прекращения боксования контакторы 121 и 124 выключаются.
3. При сериес-параллельном соединении двигателей (позиции контроллера машиниста 11 с 17 по 27) система определяет номера боксующих колесных пар и включает соответствующие контакторы 121 или 124. После прекращения боксования контактор 121 или 124 выключается.
Если боксование не прекратилось через время t2 (напряжение на обмотке реле боксования превышает напряжение уставки UУСТ2, то контакторы 121…124 остаются включенными и микропроцессорная система вырабатывает сигналы управления, поступающие на блок управления форсунками песка 10. Если в течение заданного интервала времени t3 боксование не прекратилось, то микропроцессорный блок 1 по первому выходу вырабатывает сигналы управления, поступающие на шаговый двигатель 11, который сбрасывает 1 позицию контроллера машиниста 2, а если через время t4 боксование не прекратилось, то еще 1.
Контроль температуры двигателей осуществляется непрерывно путем последовательного опроса датчиков температуры ТЭД 5 и 6. Если измеренная температура превысит заданную, то микропроцессорная система вырабатывает управляющие сигналы, поступающие на шаговый двигатель 11, который сбрасывает 2 позиции контроллера машиниста.
Если в течение 15 с процесс боксования не прекратился, то контакторы 121…124 выключаются. Выдерживается пауза 20…30 с, проверяется наличие боксования, и если оно отсутствует, то алгоритм работы системы восстанавливается. В противном случае, после трех попыток устранить боксование путем подачи песка система отключается.
Контролер машиниста 2, ТЭД 141 и 142, реле боксования 3 и 4, блок управления форсунками песка 10 являются штатными элементами электровозов постоянного тока.
Микропроцессорный блок 1 может быть выполнен в виде стандартного контроллера, имеющего аналого-цифровые преобразователи, например [5].
Шаговый двигатель 11 может быть использован любой имеющий плату управления и возможность интеграции в контроллер машиниста 2, например [6].
Датчик температуры ТЭД 5 и 6 могут быть стандартными, например [7].
Источники информации
1. Патент РФ №2025310.
2. Патент РФ №2124445.
3. А.с. 407757.
4. Самме Г.В. Фрикционное взаимодействие колесных пар локомотива с рельсами. - М.: Маршрут, 2005. - 80 с.
5. http://www.indautomation.ru/.
6. http://electroprivod.ru/.
7. http://www.zamer.ru/catalog/14.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОВЫШЕНИЯ СЦЕПЛЕНИЯ | 2008 |
|
RU2398685C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| СИСТЕМА СМЕШАННОГО ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА | 2008 |
|
RU2371332C1 |
| УСТРОЙСТВО ОСЛАБЛЕНИЯ МАГНИТНОГО ПОЛЯ ТЯГОВОГО ЭЛЕКТРИЧЕСКОГО ПРИВОДА С ПОВЫШЕННЫМИ ЭНЕРГЕТИЧЕСКИМИ ПОКАЗАТЕЛЯМИ | 2011 |
|
RU2493982C2 |
| УСТРОЙСТВО ОСЛАБЛЕНИЯ МАГНИТНОГО ПОЛЯ ТЯГОВОГО ЭЛЕКТРИЧЕСКОГО ПРИВОДА С ПОВЫШЕННЫМИ ЭНЕРГЕТИЧЕСКИМИ ПОКАЗАТЕЛЯМИ | 2011 |
|
RU2512022C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| ПРЕОБРАЗОВАТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2385237C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
Изобретение относится к железнодорожному транспорту и предназначено для использования в электровозах постоянного тока. Микропроцессорная система защиты от боксования для электровозов постоянного тока содержит первое и второе реле боксования тяговых электродвигателей, соединенных последовательно-параллельно, резисторы, шунтирующие через контакторы тяговые электродвигатели, блок управления контакторами, микропроцессорный блок, датчик позиции контроллера машиниста и шаговый двигатель. Резисторы секционированы контакторами, управляемыми блоком управления контакторами. Вход датчика позиции контроллера машиниста соединен с выходом контроллера машиниста. Выход датчика позиции контроллера машиниста соединен с первым входом микропроцессорного блока, первый выход которого соединен с шаговым двигателем, соединенного с контроллером машиниста. Второй и третий входы микропроцессорного блока соединены с выходами соответственно первого и второго реле боксования. Второй, третий, четвертый и пятый выходы микропроцессорного блока соответственно соединены с первым, вторым, третьим и четвертым входами блока управления контакторами, первый, второй, третий и четвертый выходы которого управляют соответственно первым, вторым, третьим и четвертым контакторами. Изобретение обеспечивает улучшение характеристик системы, а также полную автоматизацию процесса управления в режиме боксования. 3 з.п. ф-лы, 1 ил.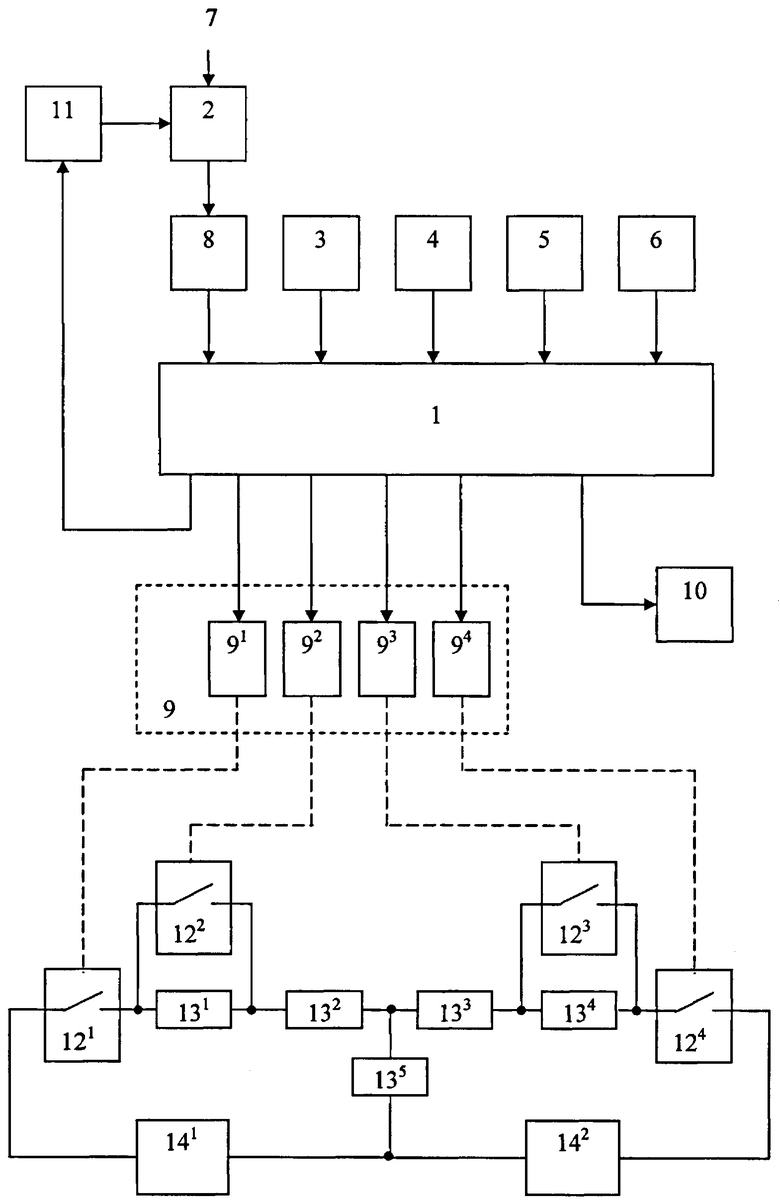
1. Микропроцессорная система защиты от боксования для электровозов постоянного тока, состоящая из первого и второго реле боксования, тяговых электродвигателей, соединенных последовательно-параллельно, и содержащая резисторы, шунтирующие через контакторы тяговые электродвигатели, и при этом указанные резисторы секционированы контакторами, управляемыми блоком управления контакторами, отличающаяся тем, что в систему вводятся микропроцессорный блок, датчик позиции контроллера машиниста и шаговый двигатель, при этом вход датчика позиции контроллера машиниста соединен с выходом контроллера машиниста, а выход датчика позиции контроллера машиниста соединен с первым входом микропроцессорного блока, первый выход которого соединен с шаговым двигателем, соединенного с контроллером машиниста, второй и третий входы микропроцессорного блока соединены с выходами соответственно первого и второго реле боксования, а второй, третий, четвертый и пятый выходы микропроцессорного блока соответственно соединены с первым, вторым, третьим и четвертым входами блока управления контакторами, первый, второй, третий и четвертый выходы которого управляют соответственно первым, вторым, третьим и четвертым контакторами.
2. Микропроцессорная система защиты от боксования по п.1, отличающаяся тем, что в систему введены первый и второй датчики температуры тягового электродвигателя, выходы которых подключены соответственно к четвертому и пятому входам микропроцессорного блока и при повышении температуры одного или более тяговых двигателей, микропроцессорный блок автоматически вырабатывает управляющий сигнал, поступающий на шаговый двигатель, который сбрасывает две позиции контроллера машиниста.
3. Микропроцессорная система защиты от боксования по п.1, отличающаяся тем, что в систему введен блок управления форсунками песка, вход которого соединен с шестым выходом микропроцессорного блока.
4. Микропроцессорная система защиты от боксования по п.1, отличающаяся тем, что если в течение 15 с процесс боксования не прекратился, то управляющие контакторы выключаются, выдерживается пауза 20…30 с, при этом проверяется наличие боксования и если оно отсутствует, то алгоритм работы системы восстанавливается, иначе после трех попыток устранить боксование путем подачи песка система отключается.
| УСТРОЙСТВО для ЗАЩИТЫ от БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА | 0 |
|
SU407757A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| JP 58033902 А, 28.02.1983. | |||

