Изобретение относится к области машиностроения и может быть использовано для автоматической балансировки вращающихся тел машин и механизмов на ходу.
Известно решение для автоматической балансировки роторов (RU 2241215, кл. 7 G01M 1/32). Устройство содержит кольцевую балансировочную камеру, полностью заполненную легкоплавким веществом, обладающим способностью расплавляться при разогреве опоры и отвердевать за счет естественного отвода теплоты в результате теплообмена между опорой и окружающей средой. В балансировочной камере находится теплопроизводящий элемент, состоящий из короткозамкнутой обмотки и магнита, возбуждающего в обмотке электродвижущую силу при дисбалансе ротора.
Недостатком решения является ограниченность применения закритической скоростью вращения.
Технический результат заключается в обеспечении автоматической балансировки вращающихся тел на ходу при докритической скорости вращения.
Устройство для автоматической балансировки вращающихся тел (3) содержит: датчики (1), (4) силы воздействующей на опору вращающегося тела (центробежная сила - согласно определения даваемого в Большой Советской Энциклопедии), приводы (2), (5) линейного перемещения. Датчики (1), (4) и приводы (2), (5) используются попарно. Привод (2) расположен вдоль хорды внутри кольцевого элемента (6), в средней части привода (2) закреплено вращающееся тело (3) таким образом, что исключается поворот тела (3) относительно хорды. Привод (2) обеспечивает линейное перемещение тела (3) вдоль хорды. Датчик (1) расположен между приводом (2) и кольцевым элементом (6) так, что измеряет действующую вдоль хорды силу и ее направление, противоположный конец привода (2) в кольцевым элементе (6) вдоль хорды не зафиксирован. При возникновении такой силы датчик (1) дает команду приводу (2) на совершение перемещения вращающегося тела (3) вдоль хорды в направлении, противоположном возникшей силе (центробежной силе). Привод (5) расположен вдоль хорды кольцевого элемента (7) и соединяет кольцевой элемент (7) и кольцевой элемент (6). При этом рабочей может быть только одна сторона (5-1) привода, вторая сторона (5-2) может выполнять только роль направляющего со свободным скольжением кольцевого элемента (6) вдоль хорды. Привод (5) обеспечивает линейное перемещение кольцевого элемента (6) вдоль хорды кольцевого элемента (7). Датчик (4) расположен между приводом (5-1) и кольцевым элементом (7) так, что измеряет действующую вдоль хорды силу и ее направление. При возникновении такой силы датчик (4) дает команду приводу (5) на совершение перемещения кольцевого элемента (6) вдоль хорды в направлении, противоположном возникшей силе (центробежной силе). Привод (2) и привод (5) расположены под углом друг к другу (угол желателен прямой). Во время работы все элементы устройства автоматической балансировки вращаются с такой же угловой скоростью, что и тело (3). Кольцевой элемент (7) может закрепляется в обычном подшипниковом узле. Датчики могут выполняться, например, электрическими, пневматическими, приводы могут быть также электрическими, пневматическими. Ключевыми элементами устройства являются датчики и приводы, именно их работа позволяет производить автоматическую балансировку вращающихся тел.
При работе такого устройства во время дисбаланса осуществляется следующий способ устранения дисбаланса.
С помощью датчиков определяется центробежная сила (согласно определению, даваемому в Большой Советской Энциклопедии), воздействующая на опору, далее дается команда приводам на перемещение вращающегося тела (3) в сторону, противоположенную вектору центробежной силы, воздействующей на опору, но ось вращения тела (3) не смещается, в результате происходит уменьшение дисбаланса. Причем датчики и приводы вращаются совместно с телом (3).
На чертеже приведено заявляемое устройство автоматической балансировки вращающихся тел.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ ЭЛЕМЕНТОВ РОТОРНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485467C2 |
| Автоматическое балансирующее устройство | 1986 |
|
SU1352270A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| ЖИДКОСТНО-ПОПЛАВКОВОЕ САМОБАЛАНСИРУЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2263836C2 |
| Устройство для балансировки роторов | 1980 |
|
SU905675A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ШПИНДЕЛЬНЫХ УЗЛОВ | 2011 |
|
RU2467836C1 |
| УСТРОЙСТВО для СИГНАЛИЗАЦИИ ДЕБАЛАНСА ВРАЩАЮЩИХСЯ ТЕЛ | 1965 |
|
SU176712A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627968C1 |
| Автоматическое балансировочное устройство | 1982 |
|
SU1068753A1 |
| СПОСОБ БАЛАНСИРОВКИ ШЛИФОВАЛЬНОГО КРУГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2173629C1 |
Изобретение относится к области машиностроения и может быть использовано для автоматической балансировки вращающихся тел машин и механизмов на ходу. С помощью датчиков определяется центробежная сила, воздействующая на опору, далее дается команда приводам на перемещение вращающегося тела в сторону, противоположную вектору центробежной силы, воздействующей на опору, но ось вращения тела не смещается, в результате происходит уменьшение дисбаланса. Причем датчики и привод вращаются совместно с телом. Технический результат заключается в обеспечении автоматической балансировки вращающихся тел на ходу при докритической скорости вращения. 2 н.п. ф-лы, 1 ил.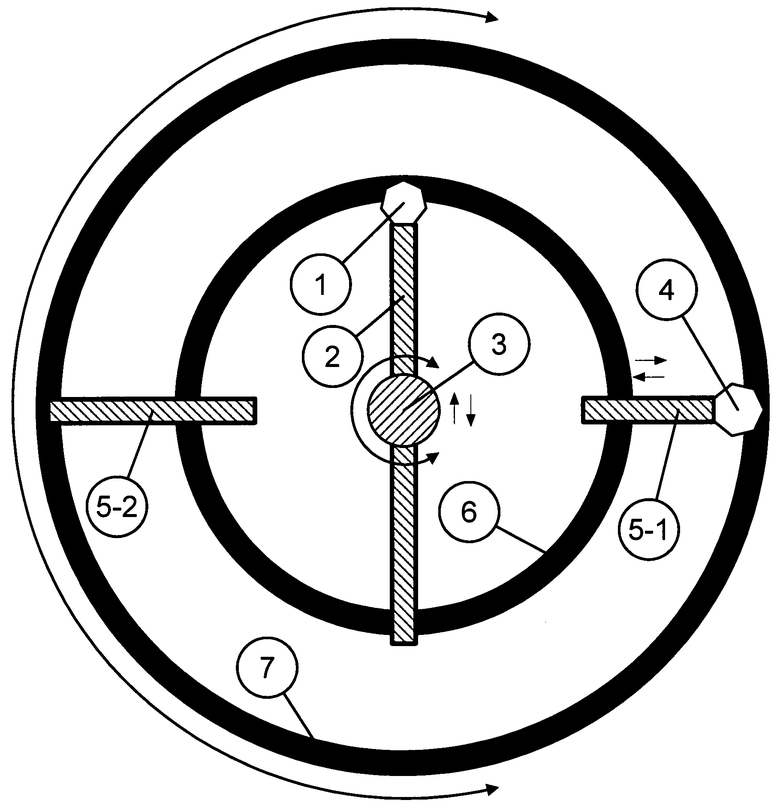
1. Устройство для автоматической балансировки вращающихся тел, включающее датчики силы (центробежной силы), воздействующей на опору вращающегося тела, приводы линейного перемещения, обеспечивающие перемещение вращающегося тела в сторону, противоположную измеренной датчиками центробежной силы, датчики и приводы выполнены таким образом, что при работе устройства вращаются совместно с вращающимся телом.
2. Способ автоматической балансировки вращающихся тел, включающий определение центробежной силы, воздействующей на опору вращения с помощью датчиков, перемещение вращающегося тела в сторону, противоположную вектору центробежной силы, воздействующей на опору с помощью приводов, при этом ось вращения тела не смещается, датчики и приводы вращаются совместно с вращающимся телом.
| Пневмогидравлический привод | 1984 |
|
SU1247585A1 |
| Экран переходного газохода и опускной шахты котла | 1986 |
|
SU1370363A1 |
| Способ автоматической балансировки роторов и устройство для его осуществления | 1989 |
|
SU1682846A1 |

