11352270
Изобретение относится к балансировочной технике и может быть использовано для динамической балансировки вращающихся масс, входящих в состав различного технологического оборудования, например, барабанов для центробежного отжима влажного белья или влажной,одежды.
Цель изобретения - повьшение производительности путем сокращения времени балансировки, которое достигается за счет одновременной работы трех механизмов коррекции.
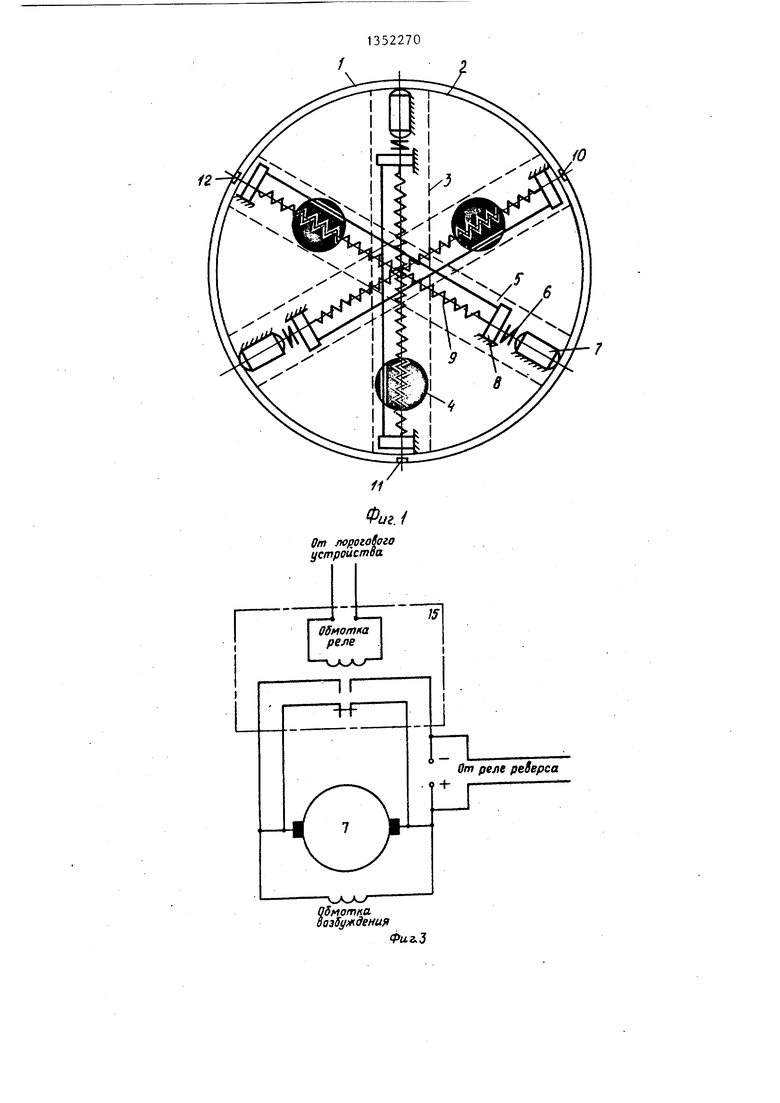
На фиг. 1 изображена кинематическая схема механизма балансирующего устройства; на фиг. 2 - блок-схема управления корректирующим механизмом балансирующего устройства; на фиг.З Устройство работает следующим образом.
Перед началом работы все грузы 4 устанавливаются так, чтобы центр их масс лежал на оси вращения балансируемого ротора 1. При отсутствии дисбаланса ротор 1 вращается спокойно, без вибраций. В этом случае каждый из вибродатчиков 10, 11 и 12 под действием центробежных сил инерции вырабатывает электрический сигнал, про- порциоНальньй нормальному ускорению своего инерционного элемента при дан- 15 ной частоте вращения ротора 1. Причем все вибродатчики 10, 11 и 12 вырабатывают одинаковые по величине сигналы, так как они расположены на одина10
35
ковом расстоянии от оси вращения росхема подключения реле запуска и реле 2о тора 1. Электрический сигнал с виброреверса к электродвигателю.
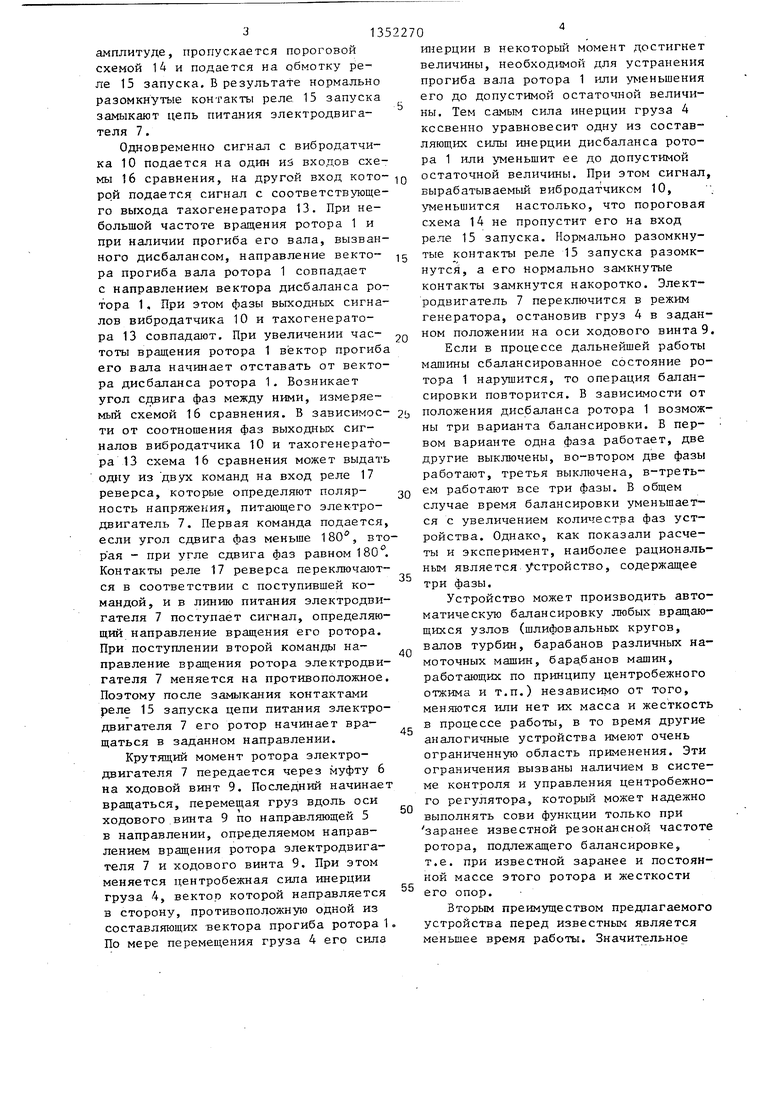
Устройство содержит балансируемый ротор 1, например барабан для центробежного отжима влажного белья или влажной одежды, корпус 2, три размещенных внутри него корректирующих механизма, каждый из которых выполнен в виде электропривода 3, включающего груз 4, установленньй с возмож- Ьюстью перемещения вдоль оси, перпен- Q дикулярнёй продольной оси ротора 1, оси перемещения грузов корректирующих механизмов расположены между собой под углом 120, направляющую 5, муфту 6, электродвигатель 7 и установленный в опорах 8 ходовой винт 9, связанньй с электродвигателем 7 через муфту. 6, три вибродатчика 10, 11 и 12, расположенных на оси перемещения соответствующих корректирующих механизмов, кинематически связанный с валом ротора t тахогенератор 13 и трехканальный блок управления, каждый канал которого выполнен в виде последовательно соединенных пороговой схемы 14, выход которой соединен с соответствующим вибродатчиком 10, и реле 15 запуска, нормально разомкнутые контакты которого подключены к линии питания соответствующего электродвигателя 7, а нормально замкнутые - к обмоткам последнего, и последовательно соединенных схемы 16 сравнения, первый вход которой соединен с вибродатчиком 10, а второй - с соотдатчиков .10, 11 и 12 поступает одновременно во все каналы блока управления, на вход соответствующей пороговой схемы 14 и на один из входов 25 схемы 16 сравнения. Сигнал, поступивший на вход пороговой схемы 14, сравнивается в нем с установленной пороговой величиной, определяющей максимально допустимую величину остаточного дисбаланса. Величина электрического сигнала, вырабатываемого каж- дь1м из в ибро датчиков 10, 11 и 12 при спокойном вращении ротора 1, меньше установленной пороговой величины. Поэтому эти сигналы не пропускаются пороговой схемой 14 и автоматическое балансирующее устройство не работает. При появлении дисбаланса, который, например, у барабанов стирально-от- жимных машин обусловлен неравномерной раскладкой белья по внутренней поверхности барабана, на балансируемый ротор 1 начинает действовать переменная по величине и направлению сила инерции дисбаланса. Под действием этой силы ось симметрии ротора 1 отклоняется на некоторый угол от оси его вращения, т.е. появляется прогиб ротора. В результате изменяется расстояние, например, от вибродатчика 10 до оси вращения ротора 1, а следовательно, изменяется величина центробежной силы инерции, действующей на чувствительный элемент вибродатчика 10, и величина электрическо40
45
50
jr - У ее . - - - - - .. - - - л
ветстТэуилцим выходом тахогенератора 13, го сигнала, вырабатываемого послед- и реле 17 реверса, переключакщие кон- ним. Если она превысит установленную такты которого подключены к линиипороговую величину, то электрический
питания электродвигателя 7.сигнал вибродатчика 10, усиленный по
Устройство работает следующим образом.
Перед началом работы все грузы 4 устанавливаются так, чтобы центр их масс лежал на оси вращения балансируемого ротора 1. При отсутствии дисбаланса ротор 1 вращается спокойно, без вибраций. В этом случае каждый из вибродатчиков 10, 11 и 12 под действием центробежных сил инерции вырабатывает электрический сигнал, про- порциоНальньй нормальному ускорению своего инерционного элемента при дан- ной частоте вращения ротора 1. Причем все вибродатчики 10, 11 и 12 вырабатывают одинаковые по величине сигналы, так как они расположены на одина
тора 1. Электрический сигнал с вибро
датчиков .10, 11 и 12 поступает одновременно во все каналы блока управления, на вход соответствующей пороговой схемы 14 и на один из входов схемы 16 сравнения. Сигнал, поступивший на вход пороговой схемы 14, сравнивается в нем с установленной пороговой величиной, определяющей максимально допустимую величину остаточного дисбаланса. Величина электрического сигнала, вырабатываемого каж- дь1м из в ибро датчиков 10, 11 и 12 при спокойном вращении ротора 1, меньше установленной пороговой величины. Поэтому эти сигналы не пропускаются пороговой схемой 14 и автоматическое балансирующее устройство не работает. При появлении дисбаланса, который, например, у барабанов стирально-от- жимных машин обусловлен неравномерной раскладкой белья по внутренней поверхности барабана, на балансируемый ротор 1 начинает действовать переменная по величине и направлению сила инерции дисбаланса. Под действием этой силы ось симметрии ротора 1 отклоняется на некоторый угол от оси его вращения, т.е. появляется прогиб ротора. В результате изменяется расстояние, например, от вибродатчика 10 до оси вращения ротора 1, а следовательно, изменяется величина центробежной силы инерции, действующей на чувствительный элемент вибродатчика 10, и величина электрическо
. - - - - - .. - - - л
го сигнала, вырабатываемого послед- ним. Если она превысит установленную пороговую величину, то электрический
инерции в некоторый момент достигнет
5
амплитуде, пропускается пороговой схемой 14 и подается на обмотку ре ле 15 запуска. В результате нормально разомкнутые контакты реле 15 запуска замыкают цепь питания электродвигателя 7.
Одновременно сигнал с вибродатчика 10 подается на один из входов схемы 16 сравнения, на другой вход кото-IQ ррй подается сигнал с соответствующего выхода тахогенератора 13. При небольшой частоте вращения ротора 1 и при наличии прогиба его вала, вызванного дисбалансом, направление вектора прогиба вала ротора 1 совпадает с направлением вектора дисбаланса ротора 1, При этом фазы выходных сигналов вибродатчика 10 и тахогенератора 13 совпадают. При увеличении частоты вращения ротора 1 вектор прогиба его вала начинает отставать от вектора дисбаланса ротора 1. Возникает угол сдвига фаз между ними, измеряемый схемой 16 сравнения. В зависимое- 2Ь положения дисбаланса ротора 1 возмож- ти от соотношения фаз выходных сиг- ны три варианта балансировки. В пер- налов вибродатчика 10 и тахогенерато- вом варианте одна фаза работает, две ра 13 схема 16 сравнения может выдать другие выключены, во-втором две фазы
15
20
величины, необходимой для устранения прогиба вала ротора 1 или уменьшения его до допустимой остаточной величины. Тем самым сила инерции груза 4 косвенно уравновесит одну из составляющих силы инерции дисбаланса ротора 1 или у меньшит ее до допустимой остаточной величины. При этом сигнал, вырабатываемый вибродатчиком 10, уменьшится настолько, что пороговая схема 14 не пропустит его на вход реле 15 запуска. Нормально разомкнутые контакты реле 15 запуска разомк- нутсй, а его нормально замкнутые контакты замкнутся накоротко. Электродвигатель 7 переключится в режим генератора, остановив груз 4 в заданном положении на оси ходового винта 9.
Если в процессе дальнейшей работы машины сбалансированное состояние ротора 1 нар шится, то операция 6anaii- сировки повторится. В зависимости от
одну из двух команд на вход реле 17 реверса, которые определяют полярность напряжения, питающего электродвигатель 7. Первая команда подается, если угол сдвига фаз меньше 180, вторая - при угле сдвига фаз равном 180. Контакты реле 17 реверса переключаются в соответствии с поступившей командой, и в линию питания электродвигателя 7 поступает сигнал, определяющий направление вращения его ротора. При поступлении второй команды направление вращения ротора электродвигателя 7 меняется на противоположное. Поэтому после замыкания контактами реле 15 запуска цепи питания электродвигателя 7 его ротор начинает вращаться в заданном направлении.
Крутящий момент ротора электродвигателя 7 передается через муфту 6 на ходовой винт 9. Последний начинает вращаться, перемещая груз вдоль оси ходового винта 9 по направляющей 5 в направлении, определяемом направлением вращения ротора электродвигателя 7 и ходового винта 9. При этом меняется центробежная сила инерции
груза 4, вектор которой направляется в сторону, противоположную одной из составляющих вектора прогиба ротора 1 По мере перемещения груза 4 его сила
1352270
инерции в некоторый момент достигнет
о а
5
Q Ь положения дисбаланса ротора 1 возмож- ны три варианта балансировки. В пер- вом варианте одна фаза работает, две другие выключены, во-втором две фазы
5
0
величины, необходимой для устранения прогиба вала ротора 1 или уменьшения его до допустимой остаточной величины. Тем самым сила инерции груза 4 косвенно уравновесит одну из составляющих силы инерции дисбаланса ротора 1 или у меньшит ее до допустимой остаточной величины. При этом сигнал, вырабатываемый вибродатчиком 10, уменьшится настолько, что пороговая схема 14 не пропустит его на вход реле 15 запуска. Нормально разомкнутые контакты реле 15 запуска разомк- нутсй, а его нормально замкнутые контакты замкнутся накоротко. Электродвигатель 7 переключится в режим генератора, остановив груз 4 в заданном положении на оси ходового винта 9.
Если в процессе дальнейшей работы машины сбалансированное состояние ротора 1 нар шится, то операция 6anaii- сировки повторится. В зависимости от
0
5
0
5
0
5
работают, третья выключена, в-треть- ем работают все три фазы. В общем случае время балансировки уменьшается с увеличением количества фаз устройства. Однако, как показали расчеты и эксперимент, наиболее рациональным является Устройство, содержащее три фазы.
Устройство может производить автоматическую балансировку любых вращающихся узлов (шлифовальных кругов, валов турбин, барабанов различных намоточных машин, бара.банов машин, работающих по принципу центробежного отжима и т.п.) независимо от того, меняются или нет их масса и жесткость в процессе работы, в то время другие аналогичные устройства имеют очень ограниченную область применения. Эти ограничения вызваны наличием в системе контроля и управления центробежного регулятора, который может надежно выполнять сови функции только при заранее известной резонансной частоте ротора, подлежащего балансировке, т.е. при известной заранее и постоянной массе этого ротора и жесткости его опор.
Вторым преимуществом предлагаемого устройства перед известным является меньшее время работы. Значительное
51352270в
время работы известного устройства Это обеспечивает определенную эконообусловлено тем, что операция баланси-мию электроэнергии, увеличивает наровки производится последовательнодежность и долговечность устройства. (сначала поиск по фазе, затем - по
радиусу), а также отсутствием меха-Формула изобретения низма фиксации груза на оси ходового
винта после окончания процесса балан-Автоматическое балансирующее уст- сировки.. Это может привести к тому,ройство, содержащее ротор, размещен- что груз под действием центробежных Q«ьй внутри него корректирующий меха- сил переместится вдоль оси винта,низм, выполненньй в виде корпуса и сбалансированное состояние ротора на-размещенного в нем электродвигателя рушится и устройству придется вклю- грузом, установленным с возможностью чаться вновь для проведения дополни-перемещения вдоль оси, перпендикуляр- тельной самоблокировки. Причем при 15ной оси вращения ротора, и вибродат- балансировке высокооборотных роторовчик, отличающееся тем, (например, валов турбин, шлифовальныхчто, с целью повьшения производитель- кругов и т.п.) такие дополнительныености за счет сокращения времени ба- включения будут происходить непрерьш-лансировки, оно снабжено двумя допол- но. Увеличение времени балансировки вибродатчиками, двумя до- приводит к повьшенному расходу элект-полнительными механизмами коррекции, роэнергии и к уменьшению надежностиоси перемещения грузов всех корректи- и долговечности работы устройства и рующих механизмов расположены под уг- машины в целом. лом 120° друг к другу, кинематически В автоматическом балансирующем 25связанным с валом ротора тахогенера- устройстве сокращение времени балан-тором и трехканальным блоком управ- сировки происходит за счет контроляления, каждый канал которого включа- и устранения появляющегося дисбалансает в себя последовательно соединенные ротора одновременно по углу и по ра-пороговую схему, вход которой соеди- диусу. Кроме того, в предлагаемом JQ соответствующим вибродатчиком, устройстве за счет перевода электро-расположенным, на оси перемещения гру- двигателей приводов, связанных с гру-за, реле запуска, связанное с электро- зaмиj в режим генератора обеспечива-двигателем, и последовательно соеди- ется надежная фиксация грузов в за-ненные схему сравнения, входы которой данном положении, что исключает воз-соединены с соответствующим вибродат- можность повторньпс включений приво-чиком и с соответствующим выходом после балансировки и сокращаеттахогенератора, и реле реверса, свя- время., необходимое для ее проведения.занное с электродвигателем.
Ю
От flOfJotoSoio устройства
От реле реберса
бмотка. 9оз5у дения
Фиг.З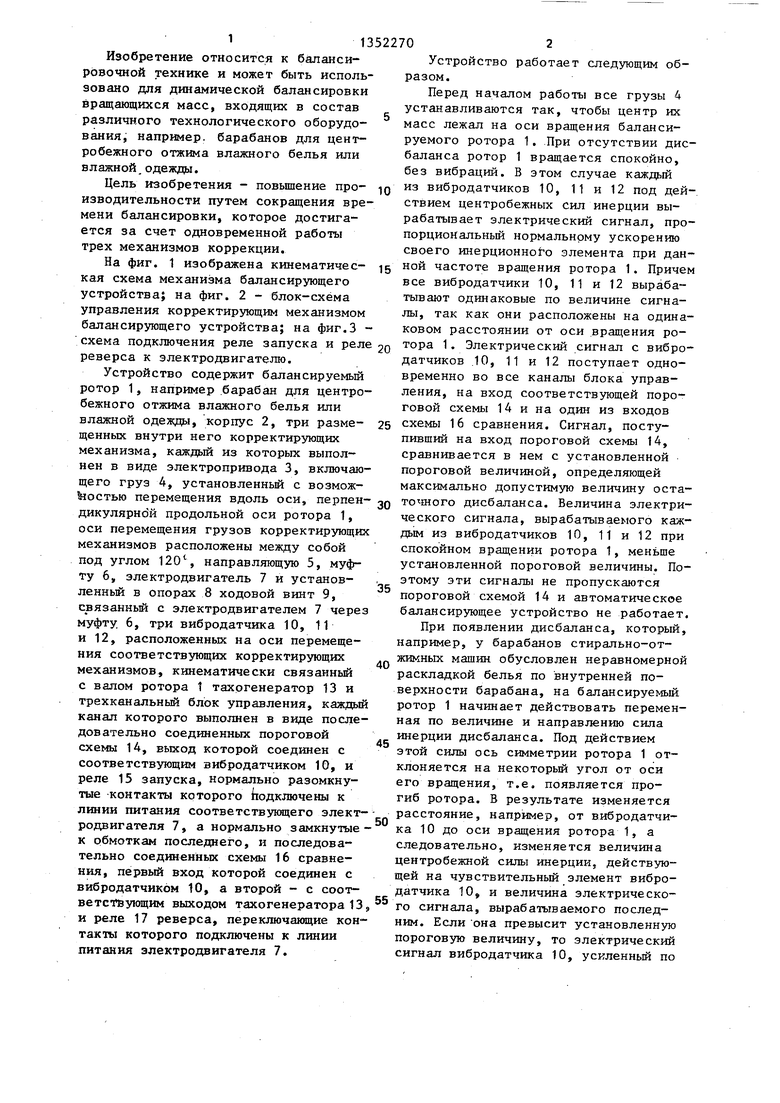

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ОБЪЕКТА | 1999 |
|
RU2147733C1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Способ балансировки роторов и устройство для его осуществления | 1980 |
|
SU943546A1 |
| СПОСОБ БАЛАНСИРОВКИ НЕСИММЕТРИЧНЫХ РОТОРОВ | 2006 |
|
RU2310177C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Балансировочное устройство | 1980 |
|
SU945698A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1320673A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Стенд для балансировки изделий | 1979 |
|
SU862012A1 |
Изобретение относится к балансировочной технике. Цель Изобретения- повьшение производительности за счет, сокращения времени балансировки. Сигналы с вибродатчиков 10 - 12 поступают на входы трехканапьного блока управления, формирующего команды для корректирующих механизмов. В каждом из каналов пороговая схема 14, связанная с соответствующим вибродатчиком 10, через реле 15 запуска определяет необходимость включения электродвигателя 7 корректирующего механизма, направление вращения которого задается через реле 17 реверса схемой 16 сравнения, связанной с вибродатчиком 10 и тахогенератором 13. 3 ил. (Л оо СП ю to «
| Устройство для балансировки шлифовального круга в полярных координатах | 1974 |
|
SU523791A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматическое балансировочное устройство | 1972 |
|
SU460464A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
