Щи г. 2
И юбретение относится к балянсирр- вг чной технике и может быть использовано дпч балансировки вращающихся деталей u процсч ге их эксплуатации
ЦРЛЬ изобретения - повышение точности балансировки за счет достижения абсолютного минимума вибраций на полном цикле перемещения корректирующих масс
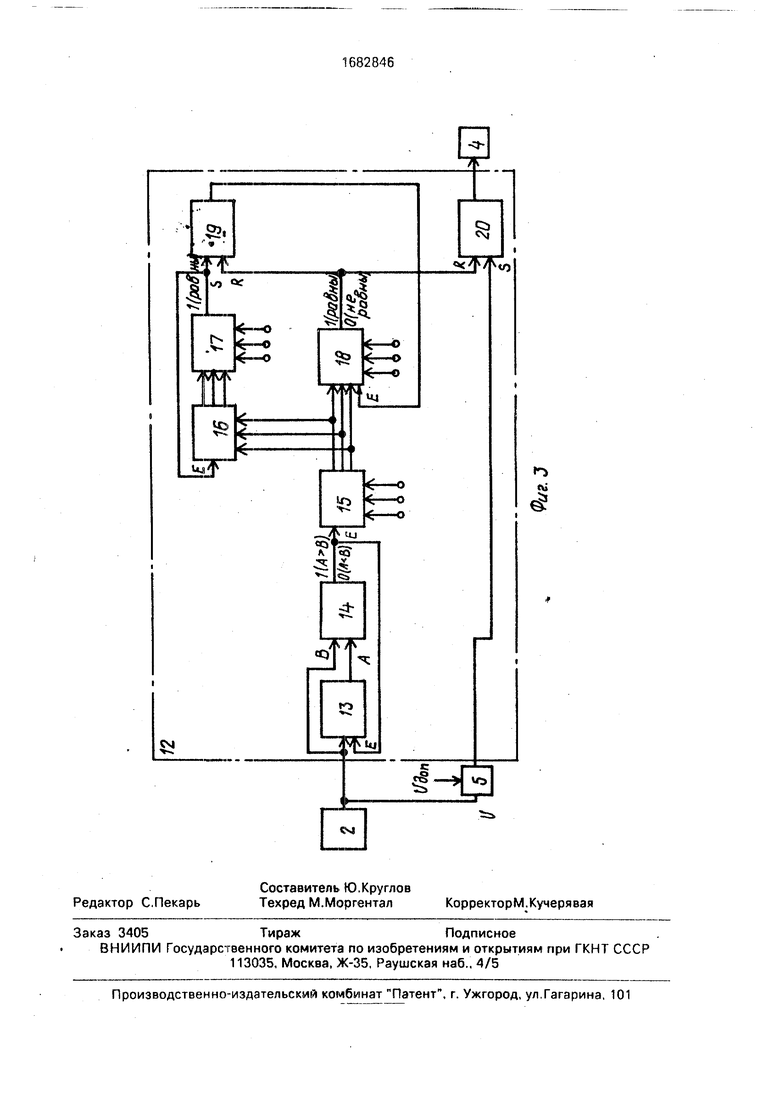
На фиг 1 представлена виброграмма, полученная при полном цикле перемещения масс относительно друг друга и ротора, на фиг 2 - блок-схема устройства, ня фиг 3 - блок-схема микропроцессора
Способ автоматическом балансировки заключается в том, что при превышении допустимого уровня виираций после разгона рогора, контролируя уровень вибрации, осуществляют полный цик 1 перемещения корректирующих масс, фи сирукл положение корректирующих масс при минимальном уровне вибраций и устанавливают корректирующие массы в положение
Устройство, реализующее способ со держит поспедопатепкно соединенные датчики 1 вибрации,блок 2 обработки и блок 3 сравнения, второй коюрого преднзз начен для задания допустимого уровня вибрации, релейный усилитель 4 исполни тельный механизм, выполненный а виде соединенного с релейным усипигелем 4 двигателя 5, кинематически связанного с пос ледним двумя корректирующими массами 6 и 7, предназначенными для размещения внутри ротора 8, три датчика 9 11 положения и микропроцессор 12, выполненный в виде последе ваге/и но соединенных первого регисфа 13, первого компаратора 14, второй вход которого соединен с выходом блока 2 обработки и информационным входом первого регистра 13, а выход - с управляющим входом последнего, соединенного с управляющим входом второго регистра 15, третьего регистра 16 и второго компаратора 17, выход которого соединен с управляющим входом третьего регистра 16, третьего компаратора 18, первая группа входов котопого соединена с выходами второго регистра 15, а вторая группа входов - с информационными входами последнего второй группой входов второго компарато рэ 17 и выходами датчиков 9 11 положения, и первого и второго триггеров 19 и 20 R-PXO- ды которых соединены с выходом треть о компаратора 18 S-входы - соответственно с выходами второго компаратора 17 и блока 3 сравнения, а выходы - ссответствее но с управляющим пходом третьего компэрято- ра 18 и вхочом релейного СИЛИТРЛР 4
Устройство работает гледуюашм обоа- зом,
Сигнал, пропорциональный уровню вибрации балансируемо о ротора 8,с датчиков 1 вибрации поступает на блок 2 обработки, с выхода которого сигнал (число) U
приходит на один из выходов блока 3 сравнения, на другой вход которого поступает сигнал (число) допустимого уровня вибрации U доп. Если U 11доп, на выходе блока 3 сравнения появляется единичный сигнал,
0 который открывает второй триггер 20 и включает релейный усилитель 4, гак что двигатель 5 начинает перемещать корректирующие массы 6 и 7 Одновременно сигнал с блока 2 обработки поступает на вход перво5 го регистра 13 и последовательно соединенного с ним первого компаратора 14 (образуют блок запоминания минимальногоуров- ня вибрации) так что послании во время работы двигателя 5 срачнив-чет уровни виб0 рации при двух следующих друг за другом измерениях Если последующе-j измеренное значение вибрации меньше предыдуще- ю то с выхода первого компаратора 14 поступает разрешающий сигнал на запись с
5 датчиков 9-11 положения во второй регистр 15 такч-е рззр шзющии сигнал на запись этого мрнь иего уровня вибрации в первый регистр 13 (аким образом за время прохождения полного цикла перемещения кор0 ректирующих масс 6 и 7 (например, от т 1 до т 1 на фиг.1) в регистре 13 оказывается записанным минимально возможный уровень вибрации LMHH, а в регистре 14 - три числа (взаимное положение корректирующих
5 масс 6 и 7 относительно ротора 8). соответствующие этому минимуму вибрации
Второй компаратор 17 сравнивает текущее положение корректирующих масс б и 7 относительно ротора 8 с их положением,
0 соответствующим L-мин в предыдущем цикле балансировки, данные о котором хранятся в третьем регистре 16 и которое соответствует начальному положению корректирующих масс 6 и 7 в текущем цикле балан5 сировки Когда корректирующие массы 6 и 7 совершат полный цикл перемещения (двигатель 5 остается включенным даже при условии U идоп, так как триггер 20 остается открытым и при отсутствии единичного сиг0 с блока 3 сравнения), показания на выводе третьего регистра 16 и выходе дат- -U1KOB 9-11 положения совпадут, на выходе компаочторя 17 появится единичный сиг нал, который откроет первый триггер 19 и
5 разрешит запись в регистр 16 показаний регистра 15, т е запись положения корректирующих масс 6 и 7 относительно ротора 8, соогретст кующего минимуму виГизции в текущем цикле балансировки На этом первый этап цикта балансировки заканчиваемся
В свою очередь первый триггер 19 дает сигнал на начало работы третьего компаратора 18, который сравнивает текущее положение корректирующих масс б и 7 относительно ротора 8 (сигналы с датчиков 9-11 положения) с их положением, соответствующим минимуму аибрации, которое хранится в регистре 14. Когда корректирующие массы 6 и 7 займут положение, соответствующее минимуму вибрации, на выходе третьего компаратора 18 появится единичный сигнал, закрывающий триггеры 10 и 20, что приведет к отключению релейного усилителя 4 и останову двигателя 5 (сигнал HP выходе блока 3 сравнения в это время равен нулю, так как Кмин иДОп). На этом цикл балансировки заканчивается и устройство готово к следующему циклу, который начинается, когда вибрация вновь превысит допустимое значение.
Таким образом, повышается точность балансировки, так как в результате ее осуществления оказывается возможным получить минимальную вибрацию ротора, и уменьшается количестпо циклов балансировки за время эксплуатации, поскольку при изменении вибрации в диапазоне LMMH L t-доп балансировка не производится.
Формула изобретения 1. Способ автоматической балансировки роторов, заключающийся в том, что измеряют уровень вибрации, создаваемый ротором, сравнивают его с допустимым уровнем и при превышении последнего перемещают корректирующие массы относительно ротора и друг друга, отличающий- с я тем, что, с целью повышения точности
корректирующие массы перемещают н,ч полный цик., контролируют уровень вибрации и .иксируют положение корректирующих масс при миниматьном уровне
вибраций,
2. Автоматическое балансировочное устройство, содержащее последовательно соединенные датчики вибрации, блок обработки и блок сравнения, релейный усипите/ ь и исполнительный механизм, выполнен кый о виде двух корректирующих масс и кинематически связанного с ним двигателя, соединенного с релейным усилителем, о т- личяющееся ом, чго, с цепью повышения точности, оно снабжено тремя датчиками полохения, последовательно соединенными первым регистром, информационный вход котооого соединен с выходом блока обработки, первым компаратором, второй
пход которого соединен с выходом блока обработки, а вихол - с управляющим входом первого реестра, соединенным управляющим входом с зторим пегие гром, информационные входы котсрло соединены с выходами датчиков положения, третьим регистром и вторым компаратором, третьим компаратором, первая группа входов которого соединена с выходами второго регистра, а вторая группа входов - с второй
группой входов второго компаратора и выходами датчиков положения и первым и вто- рым триггерами, R-входы которых соединены с выходом третьего компаратора, - соответственно с соединенны5 ми выходами второго компаратора и управляющим входом третьего регистра и выходом блока сравнения, а тыходы - соответственно с управляющим входом третьего компаратора и входом релейного усилителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение точности за счет достижения абсолютного минимума вибраций. Сигнал с датчиков 1 вибраций и блока 2 обработки поступает на соединенные между собой блок 3 сравнения и микропроцессор 12. При превышении допустимого уровня вибраций по команде с микропроцессора 12 двигатель 5 исполнительного механизма осуществляет полный цикл перемещения корректирующих масс 6 и 7 относительно друг друга и ротора 8. Текущие положения корректирующих масс 6 и 7 отмечаются датчиками 9-11 положения и передаются в микропроцессор 12, где запоминаются положения, соответствующие абсолютному минимуму сигналов с датчиков 1 вибраций. После совершения полного цикла перемещения корректирующие массы 6 и 7 устанавливаются в запомненные микропроцессором 12 положения. 2 с.п. ф-лы, 3 ил. е О 00 чз 00 &ь О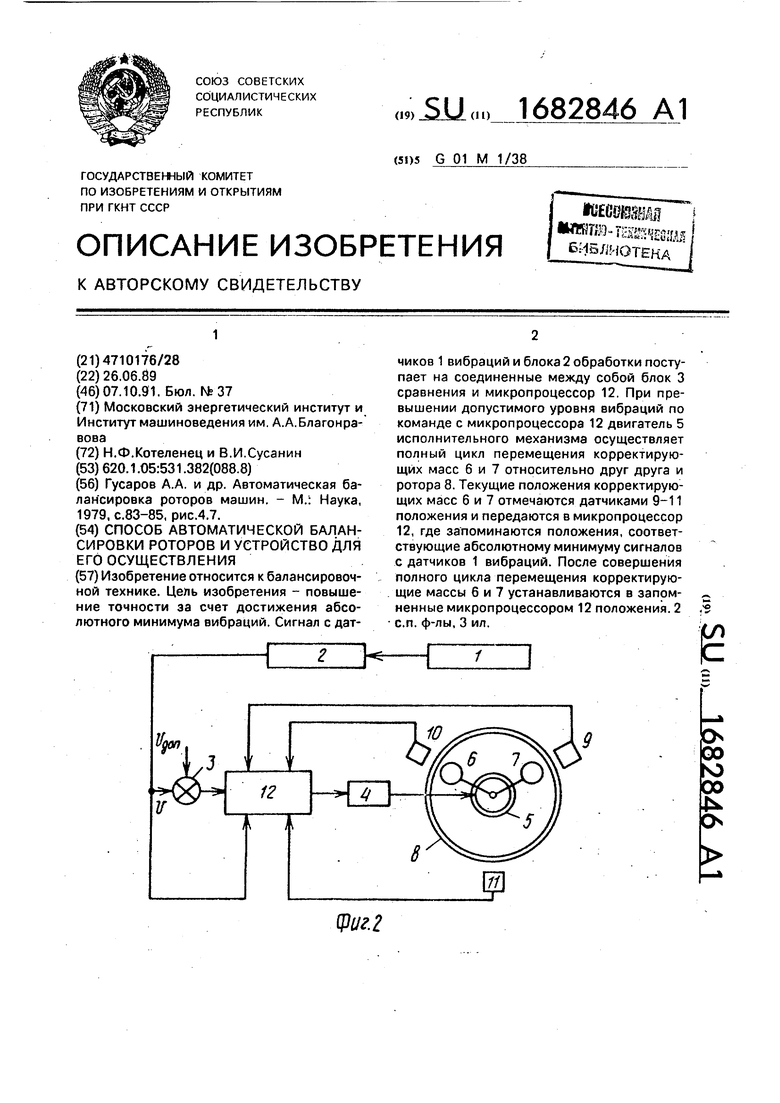
JA0ff
Jmtn-- -
Полный цикл
Фиг.1
| Гусаров А.А | |||
| и др | |||
| Автоматическая балансировка роторов машин | |||
| - М.: Наука, 1979.С.83-85, рис.4.7. |
