Изобретение относится к контрольно-измерительной технике и может использоваться для поверки измерителей скорости движения транспортных средств по видеокадрам с изображенным государственным регистрационным знаком.
Известные методы поверки измерителей скорости транспортных средств заключаются в том, что скорость измеряют сначала поверяемым измерителем, а затем - аттестованным средством поверки, после чего сравнивают показания. Однако такие методы не позволяют использовать их для поверки измерителя скорости движения транспортного средства, основанного на использовании видеокамеры, предназначенной для распознавания автомобильного государственного регистрационного знака.
Технической задачей данного изобретения является создание метода поверки средства измерений, предназначенного для измерения скорости ТС оптическим методом по видеокадрам, получаемых с помощью видеокамеры, устанавливаемой на пути движения ТС, на которых отображен государственный регистрационный знак (ГРЗ). Поверка заключается в определении метрологических характеристик поверяемого измерителя скорости ТС, а именно погрешности измерения скорости ТС.
Поставленная задача достигается тем, что cпособ определения метрологических характеристик измерителя скорости движения транспортного средства по видеокадрам, заключающийся в том, что измеряют период следования видеокадров с изображением пластины государственного регистрационного знака (ГРЗ) транспортного средства (ТС) с помощью средства поверки и с помощью поверяемого измерителя скорости, сравнивают значения периода следования видеокадров, измеренные поверяемым средством и средством поверки, определяют относительную погрешность измерения периода следования видеокадров, указанные измерения и определение относительной погрешности производят несколько раз, из полученных значений относительной погрешности периода следования видеокадров выбирают максимальное, перемещают ТС в зоне контроля видеокамеры, фиксируют положения ТС при въезде и выезде из зоны контроля видеокамеры и соответствующие им видеокадры с изображением пластины ГРЗ соответственно в верхней и нижней части видеокадра, измеряют перемещение ТС в зоне контроля с помощью средства поверки, а также с помощью поверяемого измерителя скорости движения ТС по перемещению изображения пластины ГРЗ на видеокадрах, сравнивают значения перемещения ТС, измеренные поверяемым средством и средством поверки, определяют относительную погрешность измерения перемещения ТС в зоне контроля видеокамеры, повторяют измерения перемещения ТС и определение относительной погрешности перемещения ТС в зоне контроля несколько раз, из полученных значений относительной погрешности измерения перемещения выбирают максимальное и определяют относительную погрешность измерения скорости движения ТС как сумму максимальных значений относительной погрешности измерения периода следования видеокадров и относительной погрешности измерения перемещения ТС в зоне контроля.
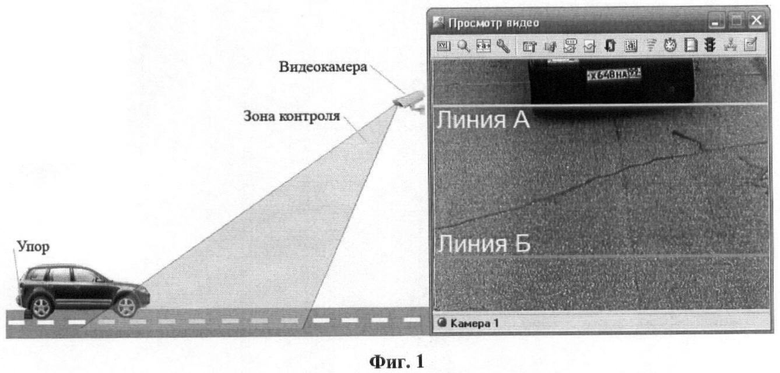
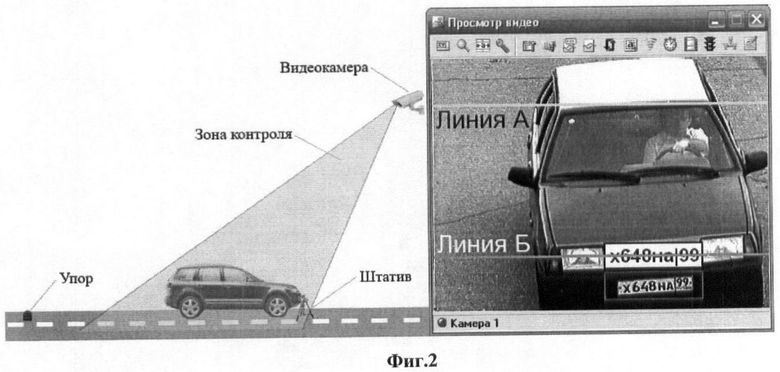
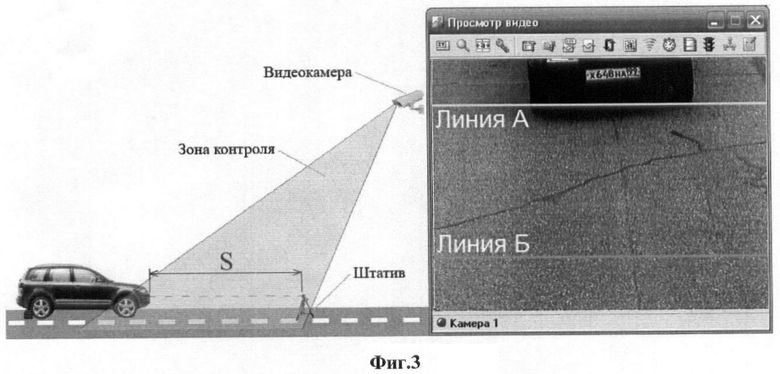
На фиг.1, 2 и 3 приведены схемы измерений и соответствующие им видеокадры, поясняющие способ.
Способ определения метрологических характеристик измерителя скорости движения транспортных средств по видеокадрам с изображением государственного регистрационного знака реализуется следующим образом.
С помощью поверенного частотомера измеряют период следования видеокадров Тизм видеокамеры. Определяют абсолютную погрешность ΔТизм и относительную погрешность δпериода измерения периода следования видеокадров по следующим выражениям:
абсолютная погрешность:
ΔT=|Tдейств-Tизм|, а
относительная погрешность:
δпериода=ΔT/Tдейств×100,
где Тдейств - значение периода следования видеокадров, измеренное средством поверки (частотомером), Тизм - значение периода следования видеокадров, измеренное поверяемым измерителем (соответствующее используемому типу видеокамеры, для стандарта PAL составляет 40 мс).
Указанные измерения периода следования видеокадров и определение относительной погрешности производят несколько раз. Из полученных значений относительной погрешности выбирают максимальное значение.
Затем размещают транспортное средство (ТС) в зоне контроля видеокамеры вдоль линии движения данной полосы автодороги (см. фиг.1) и фиксируют его положение, например, с помощью упора, размещаемого под задними колесами, например, сначала при въезде в зону контроля по ходу движения (Упор под задним колесом используется для того, чтобы в последствии, при движении задним ходом ТС не выехало полностью из зоны контроля). При этом пластина ГРЗ отображается в верхней части видеокадра, получаемого с помощью видеокамеры, что соответствует линии А на видеокадре, представленном на фиг.1. Затем перемещают ТС в зоне контроля вперед по направлению движения таким образом, чтобы пластина с ГРЗ отображалась в нижней части видеокадра, что соответствует выезду ТС из зоны контроля видеокамеры (см. линию Б на видеокадре, представленном на фиг.2). В этом положении ТС фиксируют неподвижно, затем устанавливают штатив с лазерным дальномером неподвижно в упор к пластине ГРЗ. Фиксируют также соответствующий этому положению ТС видеокадр с изображением пластины ГРЗ в нижней части видеокадра с помощью поверяемого измерителя. Затем перемещают ТС в зоне контроля против направления движения таким образом, чтобы пластина ГРЗ отображалась в верхней части видеокадра (при этом задние колеса ТС соприкасаются с упором), что соответствует въезду ТС в зону контроля видеокамеры (см. фиг.3). В этом положении ТС фиксируют неподвижно, фиксируют также соответствующий этому положению ТС видеокадр с изображением пластины ГРЗ в верхней части видеокадра при помощи поверяемого измерителя. Затем измеряют величину перемещения ТС S в зоне контроля с помощью средства поверки, предназначенного для измерения расстояний, например лазерным дальномером, измеряя расстояние до пластины ГРЗ (см. фиг.3), а также с помощью поверяемого измерителя скорости движения ТС, который пересчитывает величину перемещения изображения пластины с ГРЗ на видеокадрах в расстояние Sизм между положениями пластины с ГРЗ ТС при его указанных двух положениях.
Рассчитывают относительную погрешность измерения пройденного пути ТС δпути (в %):
δпути=(S-Sизм)/S×100,
где S - значение перемещения ТС в зоне контроля, измеренное средством поверки (лазерным дальномером); Sизм - значение перемещения ТС в зоне контроля, измеренное поверяемым измерителем (по видеокадрам);
Производят несколько раз измерения расстояний Sизм. и S, и определение относительной погрешности δпути. измерения. Выбирают из полученных значений относительной погрешности δпути максимальное значение.
Относительную погрешность δскорости измерения скорости движения ТС данным поверяемым измерителем скорости движения ТС определяют как сумму относительных погрешностей измерения периода и пройденного пути:
δскорости=δпериода+δпути.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
Изобретение относится к контрольно-измерительной технике и может применяться для поверки класса измерителей скорости (ИС) движения транспортных средств (ТС), использующих видеокамеру. Измеряют период следования видеокадров с изображением пластины государственного регистрационного знака (ГРЗ) ТС с помощью средства поверки и с помощью поверяемого ИС. Сравнивают значения периода следования видеокадров, измеренные поверяемым ИС и средством поверки, определяют относительную погрешность измерения периода следования видеокадров. Измерения и определение относительной погрешности производят несколько раз, из полученных значений относительной погрешности периода следования видеокадров выбирают максимальное. Далее перемещают ТС в зоне контроля видеокамеры, фиксируют положения ТС при въезде и выезде из зоны контроля видеокамеры и соответствующие им видеокадры с изображением пластины ГРЗ соответственно в верхней и нижней части видеокадра. Измеряют перемещение ТС в зоне контроля с помощью средства поверки, а также с помощью поверяемого ИС по перемещению изображения пластины ГРЗ на видеокадрах. Сравнивают значения перемещения ТС, измеренные поверяемым ИС и средством поверки, определяют относительную погрешность измерения перемещения ТС в зоне контроля видеокамеры. Повторяют измерения перемещения ТС и определение относительной погрешности перемещения ТС в зоне контроля несколько раз, из полученных значений относительной погрешности измерения перемещения выбирают максимальное. Относительную погрешность измерения скорости движения ТС определяют как сумму максимальных значений относительной погрешности измерения периода следования видеокадров и относительной погрешности измерения перемещения ТС в зоне контроля. 3 ил.
Способ определения метрологических характеристик измерителя скорости движения транспортного средства (ТС) по видеокадрам, заключающийся в том, что измеряют период следования видеокадров с изображением пластины государственного регистрационного знака (ГРЗ) ТС с помощью средства поверки и с помощью поверяемого измерителя скорости, сравнивают значения периода следования видеокадров, измеренные поверяемым измерителем скорости и средством поверки, определяют относительную погрешность измерения периода следования видеокадров, указанные измерения и определение относительной погрешности производят несколько раз, из полученных значений относительной погрешности измерения периода следования видеокадров выбирают максимальное, перемещают ТС в зоне контроля видеокамеры, фиксируют положения ТС при въезде и выезде из зоны контроля видеокамеры и соответствующие им видеокадры с изображением пластины ГРЗ соответственно в верхней и нижней частях видеокадра, измеряют перемещение ТС в зоне контроля с помощью средства поверки, а также с помощью поверяемого измерителя скорости по перемещению изображения пластины ГРЗ на видеокадрах, сравнивают значения перемещения ТС, измеренные поверяемым измерителем скорости и средством поверки, определяют относительную погрешность измерения перемещения ТС в зоне контроля видеокамеры, повторяют измерения перемещения ТС и определение относительной погрешности измерения перемещения ТС в зоне контроля несколько раз, из полученных значений относительной погрешности измерения перемещения выбирают максимальное и определяют относительную погрешность измерения скорости движения ТС как сумму максимальных значений относительной погрешности измерения периода следования видеокадров и относительной погрешности измерения перемещения ТС в зоне контроля.
| FR 2860875 A3, 15.04.2005 | |||
| WO 9322756 A1, 11.11.1993 | |||
| ЕР 0583647 А2, 23.02.1994 | |||
| Устройство для градуировки лазерных доплеровских измерителей скорости | 1990 |
|
SU1748072A1 |

