Предлагаемый способ управления и система управления для его реализации относятся к области разработки систем управления летательными аппаратами, ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому по совокупности существенных признаков является способ наведения противотанковой ракеты, приведенный в описании патента [1] (прототип), включающий запуск управляемой ракеты с бортовым источником излучения, прием светового потока от бортового источника излучения управляемой ракеты оптическим приемником, определение координат бортового источника излучения, определение координат управляемой ракеты и формирование команд управления.
Наиболее близкой к предлагаемой по совокупности существенных признаков является система наведения для осуществления указанного способа [1], выбранная в качестве прототипа, содержащая последовательно соединенные устройство выделения координат, состоящее из оптического приемника матричного типа и блока выделения координат, и блок формирования команд.
Наиболее близким к предлагаемому по совокупности существенных признаков является способ выделения координат для осуществления указанного способа [1] и выбранный в качестве прототипа, включающий прием светового потока от бортового источника излучения, установленного на борту управляемой ракеты (объекта), оптическим приемником, определение координат управляемого объекта.
Наиболее близким к предлагаемому по совокупности существенных признаков является устройство выделения координат для осуществления указанного способа [1] и выбранное в качестве прототипа, содержит последовательно соединенные оптический приемник, представляющий собой объектив и фотоприемник матричного типа, и блок выделения координат.
Современные условия применения противотанковых ракет потребовали создать такой способ наведения управляемой ракеты и систему наведения для его реализации, которые позволили бы преодолеть ряд технических трудностей. Например, при нахождении мощных помеховых источников (например, пламени костра или танкового прожектора) вблизи бортового источника излучения в выделенных координатах возникает большая систематическая ошибка, приводящая к промаху ПТУР. Кроме того, применение источника немодулированного излучения (пиротехнического трассера) не позволяет выделять его координаты при наложении на интенсивную помеху и требует применения довольно сложных алгоритмов прогнозирования. Изображение пиротехнического излучателя имеет неправильную форму и меняющуюся геометрию, что приводит к неточному определению координат центра источника излучения и, соответственно, к неточному определению координат ракеты и неправильному формированию команд управления, вызывающего дополнительные ошибки наведения ракеты. Применение же модулированного источника на борту ракеты требует из-за угловых колебаний ракеты относительно траектории значительного увеличения расходимости и мощности излучения, что, следовательно, приводит к использованию дополнительных источников питания и увеличению массогабаритных характеристик ракеты. Кроме того, для обеспечения требуемого спектра излучения при изготовлении пиротехнического трассера используются дорогостоящие и редкие материалы, что повышает их стоимость.
Задачей предлагаемого изобретения является разработка такого способа управления и системы управления для его реализации, которые позволили бы повысить качество и надежность процесса наведения управляемой ракеты (объекта) при наличии в поле зрения оптического приемника дополнительных источников излучения от оптических помех или естественных источников излучения без существенного изменения конструкции самой ракеты и, как следствие, повысить помехоустойчивость всей системы управления, а также снизить расходимость модулированного излучения до размера полей зрения пеленгатора с соответствующим уменьшением мощности излучения и исключить применение дорогостоящих и редких материалов.
Поставленная задача решается тем, что в способе управления, включающем запуск управляемого объекта, прием светового потока от объекта оптическим приемником, определение координат объекта и формирование команд управления, определение координат объекта осуществляют по отраженному от него зондирующему световому потоку.
Поставленная задача решается также тем, что в систему управления, содержащую последовательно соединенные устройство выделения координат и блок формирования команд, дополнительно введен блок формирования светового потока, выход которого соединен с входом устройства выделения координат, при этом устройство выделения координат выполнено с возможностью приема отраженного светового потока.
В предлагаемой системе управления в качестве блока формирования светового потока используют телескопическую систему Галилея, а в ней в качестве источника излучения используют лазер.
В предлагаемой системе управления в качестве отражателя используют триппель-призму.
В предлагаемой системе управления в качестве отражателя может быть также использовано плоское зеркало, расположенное в фокусе дополнительно введенной линзовой системы.
Поставленная задача решается тем, что в способе выделения координат, включающем прием светового потока оптическим приемником, определение координат объекта, формируют зондирующий световой поток, направляют зондирующий световой поток на отражатель, установленный на объекте, принимают отраженный световой поток и определяют координаты отражателя.
В предлагаемом способе выделения координат угол расходимости зондирующего светового потока превышает угол поля зрения оптического приемника не более чем на 10-20%.
В предлагаемом способе выделения координат длина волны излучения зондирующего светового потока находится в пределах рабочего спектрального диапазона оптического приемника.
В предлагаемом способе выделения координат при приеме светового потока оптическим приемником осуществляют регулирование средней мощности излучения в зависимости от дальности нахождения объекта.
В предлагаемом способе выделения координат при использовании модулированного зондирующего светового потока определяют пространственные координаты отражателя.
Поставленная задача решается также тем, что в устройство выделения координат, содержащее последовательно соединенные оптический приемник и блок выделения координат, дополнительно введен отражатель, выход которого соединен с входом оптического приемника, а вход отражателя является входом устройства выделения координат, выходом которого является выход блока выделения координат.
Сущность предлагаемых технических решений заключается в следующем. При пуске управляемой ракеты (объекта) формируют зондирующий световой поток и направляют его на отражатель, установленный на борту ракеты. Излучение фоноцелевой обстановки совместно с отраженным световым потоком попадает на вход оптического приемника. После определения координат отражателя осуществляется расчет координат управляемой ракеты, формируются команды управления, которые передаются на борт управляемой ракеты (объекта).
В заявляемых технических решениях предлагается обеспечить повышение качества и надежности процесса наведения управляемой ракеты без существенного изменения конструкции самой ракеты путем приема отраженного светового потока от ракеты и, как следствие, повысить помехоустойчивость всей системы управления, снизить расходимость излучения до размера полей зрения пеленгатора с соответствующим уменьшением мощности излучения и исключить применение дорогостоящих и редких материалов за счет формирования зондирующего светового потока и ориентации зондирующего светового потока на отражатель, установленный на борту ракеты.
Реализацию системы управления и устройства выделения координат поясняет чертеж, на котором обозначено: 1 - блок формирования светового потока, 2 - устройство выделения координат, 3 - блок формирования команд, 4 - отражатель, 5 - оптический приемник, 6 - блок выделения координат.
Система наведения управляемой ракеты работает следующим образом. Входным воздействием для системы наведения является угловое отклонение ракеты относительно линии визирования цели. Одновременно с пуском ракеты блок формирования светового потока 1 формирует зондирующий световой поток и направляет его на отражатель 4, установленный на борту ракеты. Оптический приемник 5 матричного типа осуществляет прием отраженного светового потока. Угол расходимости зондирующего светового потока превышает угол поля зрения оптического приемника не более чем на 10-20% волны излучения зондирующего светового потока и находится в пределах рабочего спектрального диапазона оптического приемника 5. Для уменьшения зависимости соотношения «сигнал/шум» от дальности до ракеты можно осуществлять при приеме светового потока оптическим приемником 5 регулирование средней мощности излучения в зависимости от дальности нахождения ракеты, соответственно изменяя время накопления фотоприемной матрицы и скважность входного сигнала. Источник зондирующего светового потока 1 обеспечивает наличие потока излучения в течение всего полетного времени управляемой ракеты. Определение координат отражателя и расчет координат ракеты производится в блоке выделения координат 6. Выходные сигналы с блока выделения координат 6, содержащие информацию о линейных отклонениях ракеты относительно линии прицеливания по курсу и тангажу, поступают на блок формирования команд 3, где преобразуются в сигналы управления ракетой, предназначенные для передачи по линии связи на борт управляемой ракеты.
В предлагаемой системе наведения управляемой ракеты оптический приемник 5, блок выделения координат 6 и блок формирования команд 3 могут быть выполнены, как в прототипе. В качестве блока формирования светового потока может быть использована известная телескопическая система Галилея, а в ней в качестве источника излучения использован лазер. В качестве отражателя может быть использован известный двухкоординатный уголковый отражатель с тремя взаимно перпендикулярными отражательными гранями - триппель-призма или плоское зеркало, расположенное в фокусе дополнительно введенной линзовой системы.
Предлагаемые способ управления и система управления для его осуществления по сравнению с прототипами позволяют достичь:
- существенного повышения надежности и помехоустойчивости системы управления за счет приема отраженного светового потока;
- снижения расходимости модулированного излучения до размера полей зрения пеленгатора и, соответственно, уменьшения мощности излучения;
- повышения точности управления ракетой без существенного изменения конструкции самого летательного аппарата.
Достижение всех перечисленных характеристик системы управления осуществляется за счет:
- формирования зондирующего светового потока, ориентированного на отражатель, установленный на борту ракеты;
- прием отраженного светового потока и определение координаты отражателя;
- определенной последовательностью соединения вновь вводимых элементов и выполнением определенных параметрических соотношений.
Обосновать работу системы наведения можно следующим образом.
Учитывая, что диаметр входного зрачка приемного канала оптического приемника 5 D0, диаметр выходного зрачка блока формирования светового потока 1 d0 и диаметр отражателя 4 (например, триппель-призмы) D много меньше расстояния L между этими приборами (т.е. соответствующие передние апертурные углы малы), можно провести следующие геометрические приближения.
Диаметр зондирующего светового потока в плоскости отражателя 4 в геометрическом приближении определяется выражением:

где α0 - половинный угол расходимости зондирующего светового потока.
Расходимость зондирующего пучка может быть определена по следующей зависимости:

Диаметр пучка отраженного излучения в плоскости входного зрачка оптического приемника 5 с учетом свойств отражателя 4 - триппель-призмы в геометрическом приближении определяется выражением:

где D' - диаметр отраженного пучка излучения в плоскости входного зрачка оптического приемника 5.
Мощность излучения на входе отражателя 4:

где  - освещенность отражателя - триппель-призмы;
- освещенность отражателя - триппель-призмы;
Р - средняя мощность излучения зондирующего пучка;
τа - коэффициент пропускания атмосферы на трассе длиной L.
Мощность отраженного излучения на выходе отражателя 4:

где r - коэффициент отражения отражателя 4. Например, для триппель-призмы r≈1 и соответственно
Мощность излучения на входе оптического приемника 5:

Соотношение «сигнал/шум» на выходе оптического приемника 5 определяется зависимостью:

где Ne - количество фотонов генерируемых одним пикселем;
N0 - количество фотонов, соответствующих фоновому шуму, генерируемых одним пикселем;
 - энергия, поглощенная одним пикселем за время накопления;
- энергия, поглощенная одним пикселем за время накопления;
λ - длина волны зондирующего светового потока;
η - квантовый выход фотоприемной матрицы;
h - постоянная Планка;
с - скорость света;
τ0 - коэффициент пропускания объектива оптического приемника 5;
t0 - время накопления фотоприемной матрицы.
Соотношение «сигнал/шум» (8) зависит от дальности до управляемого объекта. Зависимость соотношения «сигнал/шум» (8) от дальности можно сгладить, осуществляя при приеме светового потока оптическим приемником 5 матричного типа регулирование средней мощности излучения по дальности нахождения объекта. Изменять среднюю мощность излучения можно, например, регулируя время накопления фотоприемной матрицы и скважность зондирующего светового излучения.
При использовании модулированного зондирующего светового излучения появляется дополнительная возможность определения текущей дальности до отражателя 4 в соответствии со следующей зависимостью:

где Δτ - время между моментами передачи и приема модулирующего импульса.
Таким образом, с учетом анализа выражений (1)-(9) можно заключить, что предлагаемые технические решения обеспечивают повышение качества и надежности процесса наведения управляемой ракеты (объекта) без существенного изменения конструкции самой ракеты и, как следствие, повышение помехоустойчивости всей системы управления, а также снизить расходимость модулированного излучения до размера полей зрения пеленгатора и, соответственно, уменьшить мощность излучения за счет формирования зондирующего светового потока, ориентированного на отражатель, который установлен на борту ракеты. Кроме этого предлагаемое техническое решение позволит исключить применение дорогостоящих и редких материалов, используемых для изготовления пиротехнических источников излучения.
Следовательно, использование в предлагаемом способе наведения управляемой ракеты и системе наведения для его реализации новых элементов, соединенных в соответствии с чертежом, выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение помехоустойчивости всей системы управления.
Источники информации
1. Патент РФ №2258887 от 24.03.2004, МКИ 7 F41G 7/00. Способ наведения управляемой ракеты и система наведения для его реализации. Шипунов А.Г., Степаничев И.В., Погорельский С.Л., Галантэ А.И., Пальцев М.В., Понятский В.М., Чинарев А.В., Карамов С.В., Тикменов В.Н. (Россия)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 1998 |
|
RU2138003C1 |
| Способ лазерной защиты воздушного судна | 2023 |
|
RU2805094C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2241195C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2180090C2 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ | 2015 |
|
RU2593522C1 |
Способ включает запуск управляемого объекта, направление зондирующего светового потока на отражатель, прием светового потока от объекта, определение координат объекта и формирование команд управления. Отражатель установлен на объекте и выполнен в виде триппель-призмы или плоского зеркала, расположенного в фокусе дополнительно введенной линзовой системы. Прием светового потока осуществляется оптическим приемником. Координаты объекта определяются по отраженному от отражателя зондирующему световому потоку. Используя модулированный зондирующий световой поток, определяют пространственные координаты отражателя, включая дальности от блока формирования светового потока до отражателя и от отражателя до оптического приемника. Технический результат - повышение помехоустойчивости системы. 1 з.п. ф-лы, 1 ил.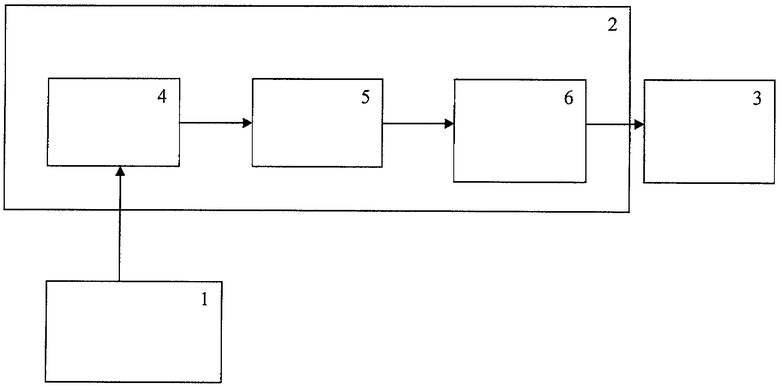
1. Способ управления, включающий запуск управляемого объекта, направление зондирующего светового потока на отражатель, установленный на объекте, прием светового потока от объекта оптическим приемником, определение координат объекта по отраженному от него зондирующему световому потоку с использованием в качестве отражателя триппель-призмы или плоского зеркала, расположенного в фокусе дополнительно введенной линзовой системы, телескопической системы Галилея, а также формирование команд управления, отличающийся тем, что при использовании модулированного зондирующего светового потока определяют пространственные координаты отражателя, включая дальности от блока формирования светового потока до отражателя и от отражателя до оптического приемника.
2. Способ по п.1, отличающийся тем, что угол расходимости зондирующего светового потока превышает угол поля зрения оптического приемника не более чем на 10-20%.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| JP 6317416 A, 15.11.1994 | |||
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 1995 |
|
RU2084925C1 |
| RU 2066062 C1, 27.08.1996 | |||
| Зеркально-линзовый отражатель | 1956 |
|
SU108030A1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ НА ЦЕЛЬ | 1999 |
|
RU2148236C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ | 2006 |
|
RU2335730C2 |

