Изобретение относится к измерительным устройствам. Устройства в соответствии с настоящим изобретением могут применяться, например, в строительстве и при расчете смет.
УРОВЕНЬ ТЕХНИКИ
В строительстве и при расчете смет во многих случаях требуются дистанционные измерения расстояний, площадей или объемов с использованием многочисленных точек на поверхности. При геодезической съемке возможность установить случайно выбранные точки в пространстве обеспечивается устройствами, часто называемыми измерительными пунктами или теодолитами. Эти устройства, устанавливаемые на штативах, могут измерять азимут, высоту и расстояния с очень высокой точностью (миллиметры на угловые секунды) для определения местоположения в полярных координатах. В них могут использоваться точные шкалы или датчики угла поворота для измерения угла и расстояния, например, при оптической триангуляции. Эти устройства обычно дороги и громоздки, и с их помощью получают измерения такой точности, которая во многих случаях не требуется. Их применение не всегда удобно.
Во многих случаях высокая степень точности измерений по выбранным точкам не требуется. Например, при измерении высоты, ширины или площади физического пространства или поверхности часто требуется приблизительная оценка площади материала для покрытия этого участка или оценка размера окна или двери. В качестве другого примера можно привести земляные работы с перемещением грунта, когда важна оценка объема материала, который требуется извлечь или добавить на участок. В этих случаях требуется меньшая степень точности измерений, чем при геодезической съемке. Удобнее также использовать в таких случаях менее громоздкое оборудование.
В определенной степени применение портативных устройств для измерения расстояний отвечает этим потребностям. Обычно в устройствах такого типа для измерения расстояний применяется оптический механизм. Например, может использоваться излучение, улавливание и триангуляция нескольких лучей для определения расстояния до заданной точки. В других портативных устройствах для измерения расстояний в оптическом механизме используется разность фаз. Оптический механизм для измерения расстояния испускает луч, и отражение луча от цели улавливается. По различию фаз отраженного луча в отношении к испускаемому лучу определяется расстояние. Для повышения точности могут использоваться лучи различных частот. Такие оптические механизмы для измерения расстояний, как и другие оптические механизмы для измерения расстояний обычных портативных устройств, могут обеспечивать достаточно точные результаты при измерениях расстояний. Однако при управлении экскавацией и в условиях, когда требуется измерение к определенному времени, преимущества точных измерений, предлагающихся устройством для измерения расстояний, не находят применения.
В качестве примера можно привести интересный тип измерения расстояния на уровне или под определенным углом подъема относительно уровня. Типичные портативные устройства для измерения расстояний включает спиртовой уровень, который помогает пользователю определять уровень или высоту. Измерение расстояния на уровне требует участия оператора портативного устройства для измерения расстояний, интерпретирующего показания уровня и вручную устанавливающего время измерения. Этот способ трудно повторить для какого-либо данного измерения.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом, достигаемым от реализации заявленного изобретения, является обеспечение дополнительных функциональных возможностей дальномера за счет автоматического определения не только расстояния до контрольных точек и вычисления хорды (т.е. расстояния между любой парой указанных точек), но и таких параметров, как площадь и объем пространства между указанными точками непосредственно в процессе проведения различных работ, в процессе которых прямые измерения указанных параметров по каким-либо причинам невозможны, в частности при подготовке пахотных земель к засеву с поправкой на качество (урожайность) отдельных участков почвы или строительно-земельных работах в условиях перемещения грунта, когда необходима оценка объема, извлекаемого и/или насыпного материала.
Портативное устройство для измерений в соответствии с одним из воплощений изобретения включает механизм для измерения расстояний и механизм для измерения углового положения. Контроллер управляет механизмом для измерения расстояний и связывает высоту, азимут или относительное угловое положение, полученное механизмом для измерения углового положения. В преимущественном типе операций каждая точка, измеряемая от заданной цели, определяющейся пользователем, автоматически связывается со значениями высоты и/или азимута, полученными механизмом для измерения углового положения. Преимущественно контроллер определяет набор относительных координат в пространстве для нескольких целевых точек. Контроллер может затем рассчитывать несколько полезных расстояний, площадей, объемов и т.д. по отношению к множеству целевых точек.
Устройство для измерений в соответствии с преимущественным воплощением изобретения может выполнять как простые, так и сложные измерения. Преимущественное воплощение устройства для измерений в соответствии с изобретением представляет собой невысокое по стоимости, удерживаемое в руках устройство, которое может измерять положение двух или более измеряемых точек в двумерном или трехмерном пространстве. В преимущественном воплощении устройства для измерения используют измерения точек для приблизительного определения, например, расстояния по хорде, площади, ограниченной измеряемыми точками, или объема, наклонения поверхностей, измерений по уровню или измерений по выбранному углу наклона.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Фиг.1 - схематический чертеж портативного оптического устройства для измерений в соответствии с изобретением и цели;
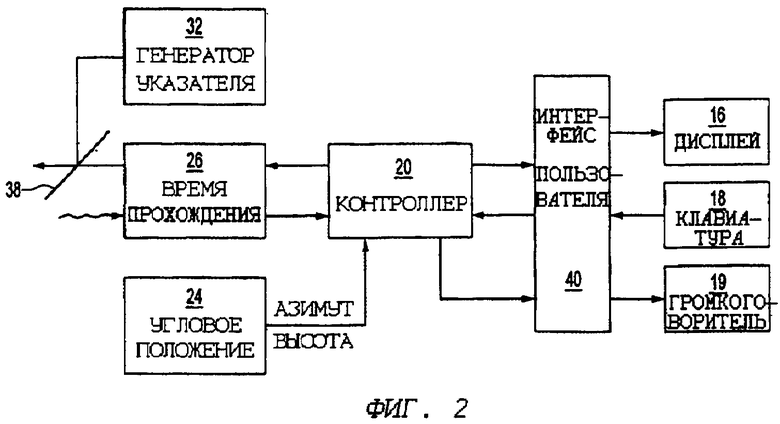
ФИГ.2 - блок-схема портативного оптического устройства, изображенного на ФИГ.1.
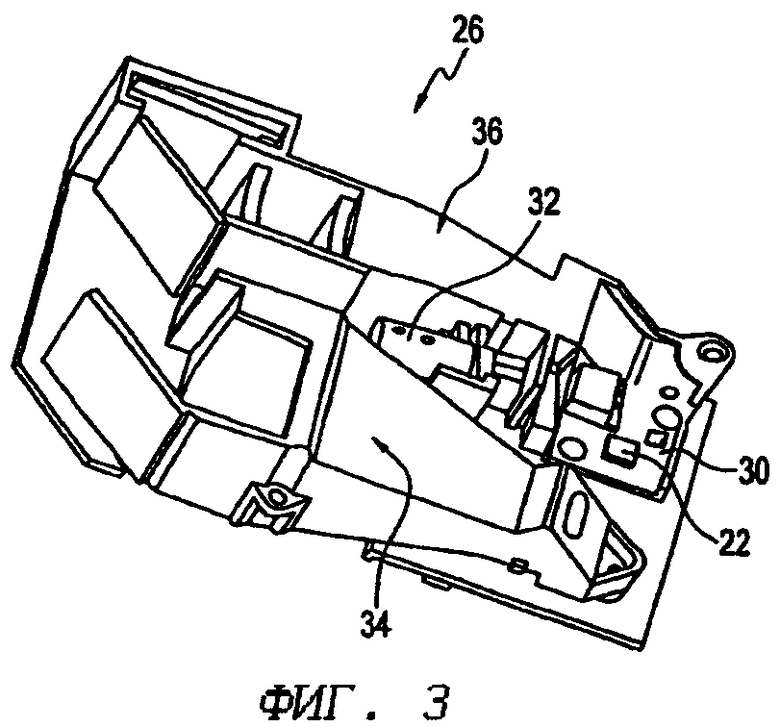
ФИГ.3 иллюстрирует оптический механизм для измерения расстояний;
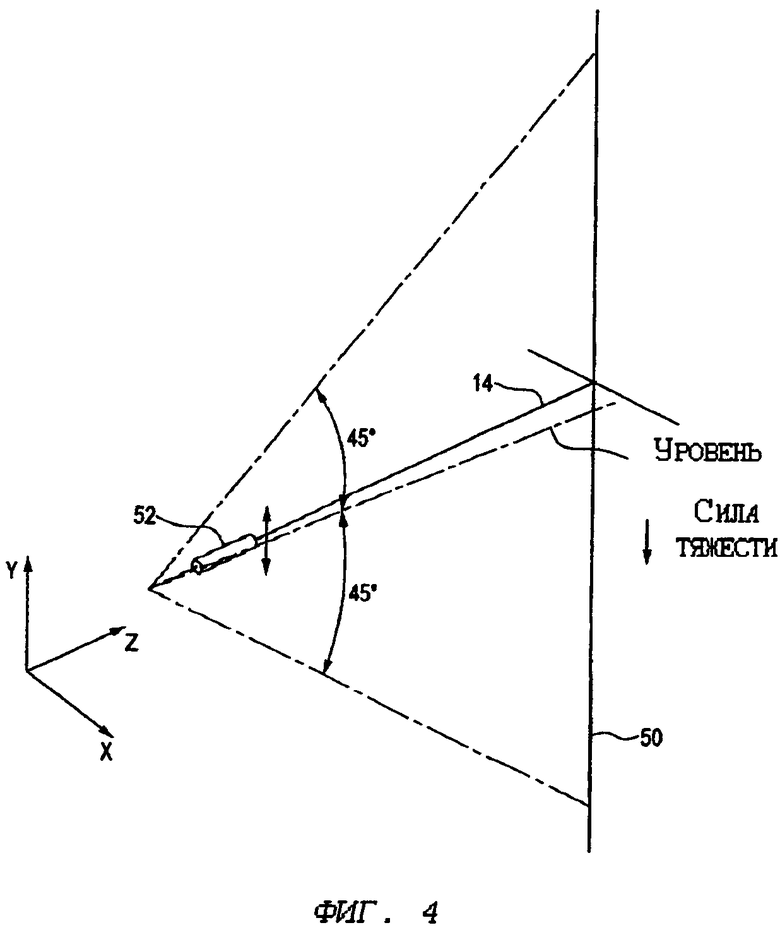
ФИГ.4 иллюстрирует операцию измерения по углу, например по уровню;
ФИГ.5 иллюстрирует операцию по углу измерения многочисленных целевых точек;
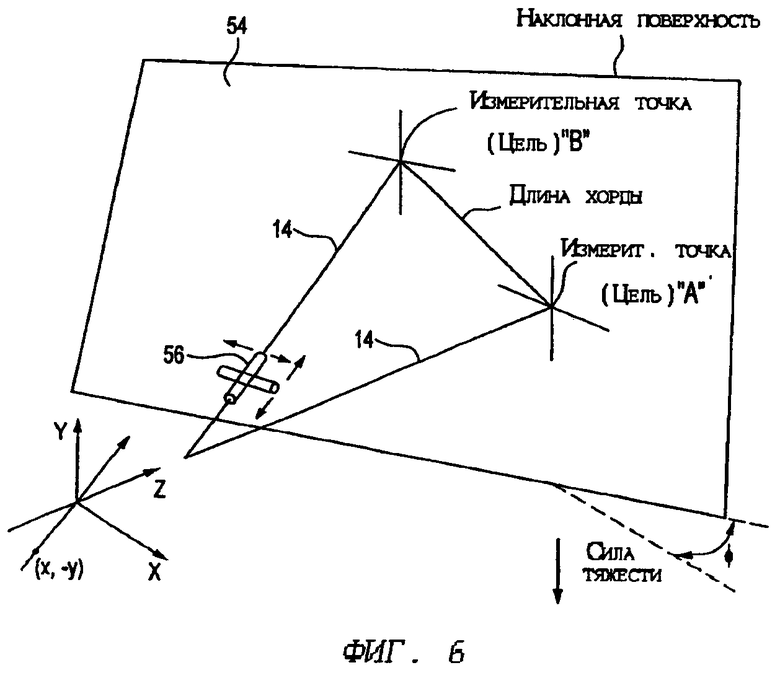
ФИГ.6 иллюстрирует измерение длины хорды и площади на наклонной плоскости; и
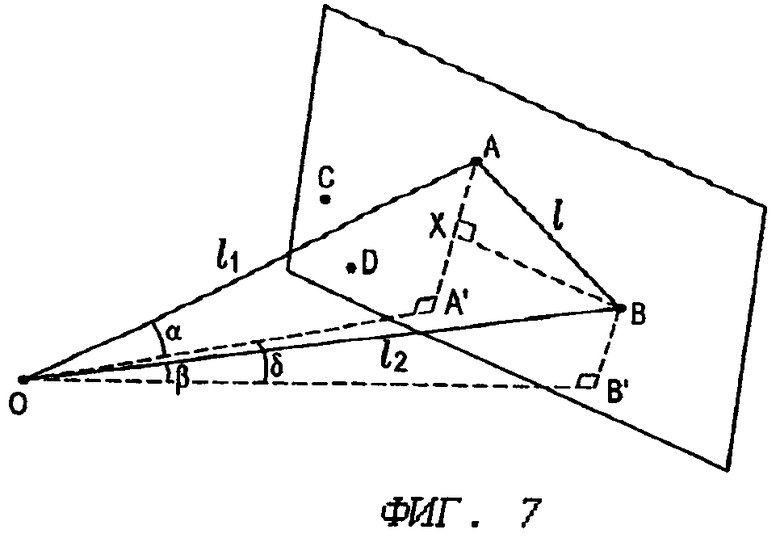
ФИГ.7 иллюстрирует расчеты длины АВ хорды, площади треугольника ABC и площади многоугольника ABCD.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕИМУЩЕСТВЕННЫХ ВОПЛОЩЕНИЙ
Изобретение относится к оптическим измерительным устройствам. Оптическое измерительное устройство преимущественного воплощения изобретения представляет собой недорогое портативное устройство, которое выполнено с возможностью измерения расстояния и высоты целевой точки. В дополнение к этому устройства преимущественного воплощения могут определять относительное положение двух или более целевых точек.
В преимущественном воплощении расстояние и высота, азимутальное положение или относительное угловое положение каждой целевой точки могут интерполироваться автоматически на основании множества автоматических измерений, проведенных в ответ на сигнал пользователя о начале процедуры измерения. Таким же способом дрожание и другие движения, вызванные пользователем, которые смещают настройку устройства с целевой точки, могут компенсироваться. В качестве примера пользователь может начать измерение по уровню через пользовательский интерфейс устройства. Начиная с очевидно отклоненного или склоненного положения относительно точки на уровне, пользователь свипирует индикатор указателя к уровню. Тон звукового сигнала в преимущественном воплощении изобретения указывает пользователю о завершении свипирования. В дополнение к этому тоновый сигнал может указывать пользователю, что свипирование ведется ошибочно, например слишком быстро. Устройство проводит измерения расстояний в процессе свипирования и записывает высоту, на которой снимается каждое измерение. Если измерение проводится на точном уровне или близко к нему, то измерение можно принимать за измерение на уровне. В противном случае проводятся тригонометрические расчеты по данным множества точек и высот с целью определения измерения на уровне.
В преимущественном воплощении в устройствах используется акселерометр для измерения углового положения, например высоты. В дополнительном преимущественном воплощении в устройствах используется двухосевой акселерометр для определения высоты и азимута. Эквивалентом двухосевого акселерометра является использование в конфигурации двух одноосевых акселерометров, например ортогональных, при этом можно определять высоту и азимут для каждой точки, для которой определяется расстояние. Подобным образом может использоваться двухосевой инклинометр или несколько одноосевых инклинометров. Данные об азимуте дают возможность дополнительных определений с помощью тригонометрических расчетов.
Воплощением изобретения является оптическое устройство для измерения расстояний, которое включает визуальный индикатор наведения, акселерометр или инклинометр, оптический механизм для измерения расстояний, управляющийся контроллером, и пользовательский интерфейс в небольшом портативном модуле. Преимущественное воплощение устройства для измерения использует измерения по точкам для определения, например, расстояния по хорде, площади или объема, ограниченного измеряемыми точками, наклона поверхностей, измерений по уровню или измерений по выбранному углу наклона. Данные по точкам, полученные оптическим устройством для измерений, которые могут основываться на оптической триангуляции, фазовом различии или измерениях задержки времени прохождения коррелируются с высотой и/или азимутом положения. Например, выход механизма для определения углового положения может преобразовываться в угол высоты непосредственно, когда ориентируется относительно силы тяжести. В дополнение к этому выход механизма для измерения углового положения может быть одиночным или двойным, интегрированным для обеспечения информации о соотношении или угловом положении.
Преимущественно оптический механизм для измерения расстояний является оптическим механизмом для измерения расстояний по расчету времени прохождения. Преимущественный оптический механизм измерения расстояний по расчету времени прохождения раскрывается Lewis и др. в патенте US 6,829,043 с названием "Устройство измерения расстояний с оптикой для коротких расстояний", выданном 7 декабря 2004 г. (далее "патент 043").
Отдельные преимущественные воплощения устройств будут далее рассматриваться со ссылками на рисунки. На ФИГ.1 показано портативное оптическое устройство для измерения расстояний 10, использующееся для измерения расстояния до цели 12. Устройство 10 формирует визуальный индикатор 14 наведения, который позволяет пользователю направлять луч, обычно инфракрасный, на цель 12. Могут использоваться также другие средства наведения, например визиры. Устройство 10 включает дисплей 16, на котором могут отображаться, например, высота и расстояние, полученные при измерении цели 12. На дисплее 16 может показываться меню пользователя и указания, он составляет часть пользовательского интерфейса с клавиатурой 18, которая позволяет пользователю выбирать операции устройства. На громкоговоритель 19 выдается звуковой выход, который используется для предупреждения пользователя, или указания, например, о завершении измерения.
На ФИГ.2 показана блок-схема электронной и оптической систем оптического устройства 10 для измерения. Оптическое устройство для измерения расстояний осуществляет измерения расстояний, инициируемые контроллером 20. Двухосевой механизм 24 для измерения углового положения (например, один или более акселерометров или инклинометров) обеспечивает регулярно изменяющиеся данные о высоте и азимуте положения для контроллера 20. Контроллер 20 может включать память для сохранения измерений и расчетов и может также посылать данные другому устройству, например компьютеру, по проводному или беспроводному соединению, используя, например, Bluetooth. В другом воплощении одноосевой механизм для измерения углового положения обеспечивает одно из значений, высоту или азимут, в зависимости от ориентации устройства 10. Несмотря на то, что преимущественно используются акселерометры и инклинометры, другие типы механизмов определения углов также могут применяться, включая как электронные, так и механические устройства. Отвес является примером механического устройства. Обычно механические устройства дают большую задержку. Акселерометры и инклинометры преимущественных воплощений обеспечивают быстрый ответ, недороги, компактны и могут легко устанавливаться на преимущественном оптическом механизме определения по времени прохождения патента 043.
На ФИГ.3 показано преимущественное расположение акселерометра 22 на механизме 26 для измерения расстояний с определением времени прохождения. Такая установка акселерометра на механизме 26 для измерения расстояний с определением времени прохождения снижает влияние прогиба или вибрации корпуса 28 (см. ФИГ.1) на акселерометр 22. Механизм 26 для измерения расстояний с определением времени прохождения включает подложку 30, которая снижает влияние прогиба или вибрации корпуса. Генератор 32 указателя наведения формирует индикатор 14, например, луча лазера. Оптическое средство излучения и оптика 34 обеспечивают луч, направленный на цель, например инфракрасный луч, а время его прохождения измеряется сенсорным оптическим средством и оптикой 36. Для дополнительных пояснений в отношении работы механизма можно обратиться к патенту 043.
Выход генератора указателя совмещается с целевым лучом с помощью дихроичного зеркала 38 для обеспечения пользователю указания места наведения, используя видимый луч 14 или с помощью другого способа, такого как виртуальное изображение. Пользовательский интерфейс 40 управляет дисплеем 16 и клавиатурой 18 для того, чтобы обеспечить пользователя возможностью выбора режима работы, запуска визуального индикатора 14 наведения, а также для того, чтобы пользователь мог выбирать одно или более расстояний, площадей, объемов, хорд или других измерений. Контроллер 20 коррелирует данные азимута и/или высоты, получаемые от механизма 24 для измерения углового положения с измерениями расстояний с тем, чтобы установить относительные координаты измеряемых точек. Пользовательский дисплей 16 может показывать сводку, включающую расстояние и угол измеряемых точек вместе с расчетными параметрами, такими как расстояние по хорде, площадь поверхности или проема или объем определенной зоны.
Некоторые типы измерений и расчетов, осуществляемых контроллером 20 для определения измеряемых параметров, рассматриваются далее, чтобы показать дополнительные признаки преимущественного воплощения устройства. ФИГ. 4 иллюстрирует измерение по уровню в отношении целевой поверхности 50, например стены. Одноосевой механизм 52 для измерения углового положения ориентируется для измерения уровня угла подъема линии обзора индикатора 14 направления. Применяя эту одноосную конфигурацию, высота одиночной точки на целевой поверхности 50 может оцениваться на основании измеренного расстояния и угла подъема, или расстояние может измеряться по требующемуся углу или на уровне. Применяя только одноосевой акселерометр высоты, например углы до ±45 градусов относительно нормали или вертикали могут определяться с достаточной хорошей точностью. В режиме измерения угла луч можно свипировать вдоль поверхности, пока не будет достигнут данный угол (который может быть плоским), и в это время оценивается расстояние. Когда измерение расстояния длительно по сравнению с изменением расстояния из-за скорости свипирования, множественные точки измерения расстояний могут коррелироваться с углом подъема для обеспечения интерполяции расстояния при данном угле или уровне. Также на основании скорости свипирования и других параметров может рассчитываться и выводится на дисплей допуск измерения. Обычно применение возможности измерения по углу представляет собой инициирование измерения по уровню или отвесу в том случае, когда область ориентирована вертикально.
ФИГ.5 иллюстрирует свипирование, позволяющее контроллеру интерполировать расстояние при определенном угле, включая, например, уровень. В этом случае серия измерений инициируется пользователем с помощью клавиатуры 18. Свипирование начинается с измеряемой точки "А" на поверхности 50. Свипирование продолжается по точкам "В", "С" и "D", проходя через уровень или другой интересующий угол. С помощью тригонометрических расчетов контроллер определяет расстояние поверхности 50 на уровне или при другом интересующем угле. В том случае, когда скорость углового свипирования приводит к большим изменениям в расстоянии по последовательным измерительным точкам, котроллер может воспользоваться алгоритмом, который осуществляет линейную интерполяцию последовательных данных двух точек, полученных в ходе свипирования. Линейная интерполяция осуществляется простой линейной функцией, соединяющей последовательные данные двух точек (угловое считывание, расстояние). В альтернативном подходе применяется тригонометрический прогноз, позволяющий использовать одиночную точку в пределах ±р градусов. Механизм измерения углового положения определяет текущий угол, при котором получено измерение, затем, применяя обычные тригонометрическую функция (косинус), может рассчитываться значение по уровню.
Например, в преимущественном воплощении, соответствующем ФИГ. 2, механизм 24 для измерения углового положения представляет собой работающую на холостом ходу подсистему, которая непрерывно посылает сигналы (аналоговое напряжение), если она получает питание. Когда пользователь начинает измерение, запуская измерительную функцию, например измерение на уровне, контроллер 20 снимает точное значение углового положения. Затем контролер опрашивает механизм 24 для измерения углового положения, получая непрерывные значения измерений, например, с частотой около 4 Гц. Если непрерывное измерение показывает внезапное значительное изменение, в следующем запросе снимается точное значение. Контроллер 20 осуществляет аналого-цифровое преобразование (или получает значения от какого-либо конвертера) в режиме свободного доступа, например, находясь в интервале выборки менее 300 мкс. В преимущественном воплощении контролер 20 содержит или использует память, которая составляет кольцевой буфер 32 текущих значений этих конвертируемых аналого-цифровых величин.
Каждые 10 мс временного интервала среднее значение этих 32 величин рассчитывается и сохраняется в так называемом вторичном буфере. В одном из примеров воплощения имеется восемь таких буферов (также называемых кольцевыми буферами), которые, таким образом, могут сохранять усредненные аналого-цифровые значения за последние 80 мс. Для каждого получаемого значения расстояния вне зависимости от того, является ли оно точным значением или одним из непрерывных считываний, среднее значение 8 вторичных значений может использоваться для получения текущего уклона. Когда уклон оказывается в пределах ±Р градусов (где J3 - заданное ограничение, например, 2 градуса), полученное при этом измерение будет использоваться для формирования действительного расстояния по следующей формуле:
действительное расстояние=интервальное расстояние, полученное механизмом * косинус (×), где × - измеренный уклон в пределах ±β градусов. Этот преимущественный способ оценки часто избегает задержки, например, около 1 секунды, которая может потребоваться при снятии точного считывания механизма измерения углового положения.
ФИГ.6 иллюстрирует двухосевое измерение наклонной поверхности 54. Двухосевой механизм 56 измерения углового положения, например, два ортогонально установленных акселерометров или инклинометров, могут обладать чувствительностью к углу в 360 градусов или возможностью измерять как азимут, так и высоту области в пространстве. Возможность измерять как азимут, так и высоту дополнительно обеспечивает измерение относительных местоположений удаленных точек для получения длин хорд, площади и объема. В данном случае измерительные точки "В" и "А" находятся на поверхности 54, которая наклонена относительно отвеса. Точки "А" и "В" разделены хордой определенной длины. Если добавить другую точку, можно задать площадь. Дополнительные точки позволяют определить объем. В этом воплощении изобретения пользователь может направлять на серию местоположений на поверхности 54 (или объекта), ограничивая зону интереса. Пользователь выбирает режим работы (хорда, площадь или объем) и затем начинает снимать измерения для каждой точки. Первое измерение в серии установит начальную координату для азимута, высоты и расстояния. Затем пользователь сканирует следующее местоположение для измерения, поворачивая устройство вокруг произвольной оси. Лучшие результаты можно получить, используя штатив. Однако для большинства оценочных применений измерение, когда устройство держится в руках, является адекватным.
В то время как преимущественно использовать двухосевой механизм для измерения углового положения, возможно также применение одноосевого механизма для определения по нескольким осям. Ориентацию акселерометра можно изменять, применяя механизм, управляемый поворотным или линейным приводом. Переключатель, соединенный с механизмом, позволяет изменять обработку выходных данных акселерометра в соответствии с выбранной конфигурацией. Таким образом, пользователь может изменять конфигурацию для измерений в соответствии с потребностями. Например, одноосевой акселерометр можно переориентировать на 90 градусов в вертикальной плоскости для проведения измерений вблизи вертикали или горизонтали. Вращение оси измерения акселерометра на 90 градусов может использоваться для измерения азимута.
На ФИГ.7 показаны проекции, которые используются контроллером 20 для расчета длины хорды между точками "А" и "В" на обобщенной поверхности. Если добавляется измерительная точка "С", может также рассчитываться площадь. Дополнительная точка "D" позволяет рассчитывать границы площади по четырем точкам. Далее приводятся расчеты со ссылкой на ФИГ.7.
Первый расчет относится к длине / хорды. Азимутальный угол о определяется как А′0В′=о. Точка А имеет угол высоты α, определяемый как ∠AO А′=α. Точка В имеет угол высоты β, определяемый как ∠BOB′=β. Длины сторон треугольника АОВ обозначаются как OA=l1, OB=l2 и АВ=-l. Длина l определяется как l2=(Ах)2+(Вх)2, где Ах - расстояние между А и х, а Вх - расстояние между В и х. Поэтому эта длина может определяться как (Ах)2+(A′B′)2, где А′В′ является расстоянием между А′ и В′. Применяя теорему косинусов, получаем (А′В′)2=l1 2 cos2α + l2 2 cos2β - 211l2 cos α cos β cos σ (теорема косинусов для Δ А′ОВ′). Затем Ах=АА′-ВВ′, где АА′ - расстояние между А и А′ и ВВ′ - расстояние между В и В′.
l1 sin α-l2 sin β
(Ax)=(l1 sin α -l2 sin β)2=l1 2 sin2 α+l2 2 sin β2 -21il2 sin α sin β
l2=l1 2 α+l2 2 sin′2 - 21l 2 sin α sin β+l1 2 cos2 α+l2 2 cos2β - 2l1, l2 cos α cos β cods σ
Упрощая, получаем l2=l1 2+l2 2-2l1l2(sin α sin β+cos α cos β cos δ)
При дальнейших расчетах для определения длины хорды / в трехмерном пространстве, как описывается выше, длины в треугольнике, образованном точками А, В, С, можно получить подобным образом. Если три стороны треугольника ABC рассматриваются как три длины хорд а, b, с, эти длины хорд рассчитываются, как описывается выше. После определения длин а, b, и с площадь соответствующего треугольника может рассчитываться по формуле Херона:
Площадь треугольника= 
где S=½(а+b+с) - полупериметр треугольника.
Многоугольник ABCD в плоскости задает площадь по 4 точкам, которая также может рассчитываться. С помощью простого приема можно разделить многоугольник на два треугольника. Тогда площадь многоугольника является простой суммой двух треугольников ABD и BED. Эти площади рассчитываются, как описывается выше.
Примеры различных вычислений можно продолжать для различных форм, площадей и объемов, как понятно специалисту. Можно также использовать другие тригонометрические решения. Устройство в соответствии с изобретением позволяет получать координаты в пространстве для наборов целевых точек, с помощью которых можно определять различные длины, площади, объемы, дуги, диаметры и т.п., что понятно специалистам.
Хотя отдельные воплощения настоящего изобретения были показаны и описаны, следует понимать, что другие модификации, замены и альтернативы могут предлагаться специалистами в данной области. Такие модификации, замены и альтернативы могут выполняться без нарушения сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА, СПОСОБ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ С КОМПЬЮТЕРНОЙ ПРОГРАММОЙ ДЛЯ ПРОГНОЗИРОВАНИЯ ГЕОМЕТРИИ СКВАЖИНЫ | 2011 |
|
RU2560462C2 |
| ПЕРЕВОРАЧИВАЮЩИЙСЯ ИНКЛИНОМЕТР С ГИРОДАТЧИКАМИ | 2015 |
|
RU2703042C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ ДВУХ ТЕЛ ОТ ЗАДАННОГО ПОЛОЖЕНИЯ | 2015 |
|
RU2653771C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 2011 |
|
RU2491507C1 |
| НЕМАГНИТНОЕ ИЗМЕРЕНИЕ АЗИМУТА С ИСПОЛЬЗОВАНИЕМ МЕТ ЭЛЕКТРОХИМИЧЕСКИХ ДАТЧИКОВ | 2010 |
|
RU2539123C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО УДАЛЕННЫХ ОБЪЕКТОВ | 2016 |
|
RU2652535C2 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| Пространственная звуковая система для навигации людей с нарушениями зрения | 2022 |
|
RU2802853C1 |

Изобретение относится к измерительным устройствам. Техническим результатом является обеспечение дополнительных функциональных возможностей дальномера за счет автоматического определения не только расстояния до контрольных точек и вычисления хорды, но и таких параметров, как площадь и объем пространства между указанными точками непосредственно в процессе проведения различных работ, в процессе которых прямые измерения указанных параметров по каким-либо причинам невозможны. Портативное оптическое устройство для определения расстояний содержит механизм для измерения расстояний, механизм для угловых измерений для определения, по меньшей мере, одной из величин высоты и азимута, генератор указателя для генерирования видимого индикаторного луча в качестве индикатора наведения, оптическую систему для настройки индикаторного луча и луча, направленного к цели. Портативное оптическое устройство для определения расстояний также содержит интерфейс пользователя, контроллер пользователя, который контролирует механизм для измерения расстояний и связывает одно из значений высоты, азимута или относительного углового положения, получаемые от механизма для измерения углового положения с измерениями расстояния, полученными от механизма для измерения расстояний. Контроллер рассчитывает измерения в зависимости от режима измерения, выбранного с помощью интерфейса пользователя, которые зависят от расстояния и одной из величин высоты или азимута, или обеих этих величин, для множества целевых точек из расстояний, измеренных указанным средством для измерения расстояний или одной, или обеих величин высоты и азимута, измеренных средством для угловых измерений без какой-либо дополнительной информации. Контролер рассчитывает, по меньшей мере, одно из значений длины хорды, а также площади и/или объема, связанных с множеством целевых точек. 10 з.п. ф-лы, 7 ил.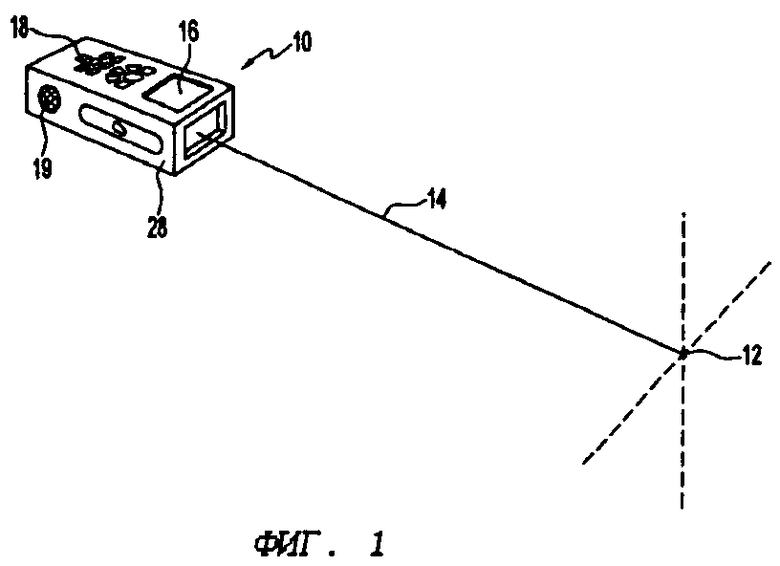
1. Портативное оптическое устройство для определения расстояний, которое содержит:
механизм для измерения расстояний, который генерирует луч, направленный к цели, для измерения расстояния до целевой точки, причем измерение расстояния включает использование жесткого основания;
механизм для угловых измерений для определения, по меньшей мере, одной из величин высоты и азимута, механизм для угловых измерений монтируется на указанном жестком основании;
генератор указателя для генерирования видимого индикаторного луча в качестве индикатора наведения;
оптическую систему для настройки индикаторного луча и луча, направленного к цели;
интерфейс пользователя, включающий дисплей, который может показывать высоту и измеряемое расстояние до цели, и ввод, который позволяет пользователю выбирать один или более режимов измерения расстояния, площади, объема, хорды или других измерений; и
контроллер пользователя, который контролирует механизм для измерения расстояний и связывает одно из значений высоты, азимута или относительного углового положения, получаемых от механизма для измерения углового положения, с измерениями расстояний, полученными от механизма для измерения расстояний; контроллер рассчитывает измерения в зависимости от режима измерения, выбранного с помощью интерфейса пользователя, которые зависят от расстояния и одной из величин высоты, или азимута, или обеих этих величин, для множества целевых точек из расстояний, измеренных указанным средством для измерения расстояний или одной или обеих величин высоты и азимута, измеренных средством для угловых измерений без какой-либо дополнительной информации, причем контроллер рассчитывает, по меньшей мере, одно из значений длины хорды, а также площади и/или объема, связанных с множеством целевых точек.
2. Устройство по п.1, в котором указанный механизм для измерения углового положения представляет собой инклинометр.
3. Устройство по п.1, в котором контроллер связывает каждую целевую точку, измеренную от цели под контролем пользователя, с положениями как по высоте, так и по азимуту, полученными от указанного механизма для измерения углового положения.
4. Устройство по п.3, в котором контроллер определяет набор относительных координат в пространстве для множества соответствующих целевых точек.
5. Устройство по п.1, дополнительно содержащее:
громкоговоритель, который обеспечивает звуковой выход для предупреждения пользователя или указания о завершении измерения.
6. Устройство по п.5, в котором механизм для измерения углового положения представляет собой двухосевой механизм для измерения углового положения, который периодически передает уточнения измерений высоты и азимута указанному контроллеру.
7. Устройство по п.6, в котором дисплей управляется указанным контроллером, дополнительно представляя меню пользователя и указания.
8. Устройство по п.1, в котором механизм для измерения углового положения содержит акселерометр.
9. Устройство по п.1, в котором указанный механизм для определения углового положения представляет собой двухосевой инклинометр.
10. Устройство по п.1, в котором указанный контроллер рассчитывает расстояние между целевыми точками под определенным азимутальным углом или углом высоты.
11. Устройство по п.10, в котором указанный контроллер рассчитывает расстояние между целевыми точками на уровне.
| US 6108071 А, 22.08.2000 | |||
| Устройство для измерения расстояния | 1978 |
|
SU720298A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ПОВЕРХНОСТИ ДО ИСХОДНОЙ ТОЧКИ | 1994 |
|
RU2085836C1 |
| Копировально-фрезерный станок | 1936 |
|
SU50651A1 |
| ВЫСОКОИНФОРМАТИВНЫЙ РАСПОЗНАЮЩИЙ ДАЛЬНОМЕР | 2003 |
|
RU2254557C1 |

