Область техники, к которой относится изобретение
Настоящее изобретение относится к проверке функционирования инерциального блока движущегося объекта, при этом блок установлен на имитаторе движения.
Уровень техники
Как правило, транспортное средство, такое как воздушное судно, ракета или любой другой тип движущегося объекта оборудуют системой навигации и управления, содержащей бортовой компьютер, инерциальный блок и средства управления для выполнения определения местоположения в пространстве, управления и задания направления движущегося объекта.
Более конкретно, средства управления (например, аэродинамические рули) направляют движущийся объект по направлению к указанному месту назначения или вдоль конкретной траектории при помощи команд, принимаемых от бортового компьютера, который получает инерциальную информацию от инерциального блока. На основании этой инерциальной информации бортовой компьютер вычисляет пространственное местоположение движущегося объекта и, как его функцию, посылает инструкции или команды на средства управления таким образом, чтобы движущийся объект следовал по своему маршруту к своему месту назначения.
Тем не менее, если инерциальный блок имеет неисправность, то компьютер производит свои расчеты пространственного местоположения движущегося объекта исходя из неточной инерциальной информации. Следовательно, бортовой компьютер делает ошибки на каждом шаге вычислений и посылает на средства управления ошибочные команды. В результате реальная траектория движущегося объекта сильно отличается от траектории, рассчитанной бортовым компьютером. Соответственно, если инерциальный блок испытывает серьезный сбой в работе, то команды, посылаемые бортовым компьютером, являются настолько ошибочными, что существует риск того, что движущийся объект станет дестабилизированным.
Таким образом, для проверки инерциальных блоков часто используют имитаторы движения. В частности, используется комбинированное моделирование с применением реальных подсистем (например, инерциального блока, имитатора движения, бортового компьютера движущегося объекта, некоторых других элементов движущегося объекта и т.д.) совместно с математическими моделями других подсистем (например, других элементов движущегося объекта, атмосферы и т.д.).
В настоящее время при комбинированном моделировании с использованием инерциальных блоков в отношении информации, поступающей от установленных в инерциальном блоке акселерометров, могут возникать две ситуации.
В первой ситуации информация от акселерометров не используется и заменяется информацией от математической модели. Это связано с тем фактом, что имитатор движения не может воспроизвести поступательное движение. Соответственно, информация от акселерометров инерциального блока является неполной и не содержит информации, касающейся линейного перемещения движущегося объекта. В результате бортовой компьютер движущегося объекта не может использовать информацию от акселерометров инерциального блока для определения местоположения движущегося объекта, управления им и задания ему направления движения. Следовательно, при комбинированном моделировании не выявляются отклонения от нормы, которые могут присутствовать в этой информации. Другими словами, вклад акселерометров реального инерциального блока отсутствует, что исключает обнаружение даже малейшей потенциальной неисправности, которая может возникнуть в акселерометрах.
Во второй ситуации информация от акселерометров дополняется информацией, отражающей поступательное движение, вычисленной при помощи математической модели. Тем не менее, информация от акселерометров инерциального блока измеряется в фиксированной точке, соответствующей координатам имитационной лаборатории и, следовательно, не полностью отражает ту информацию, которую давали бы акселерометры для величины одной и той же физической природы, по мере перемещения движущегося объекта вдоль своей траектории вокруг Земли. Например, гравитационное поле в неподвижной точке, в которой находится лаборатория, является неизменным, тогда как данное поле, воспринимаемое акселерометрами инерциального блока, расположенного на борту движущегося объекта, перемещающегося вокруг Земли, изменяется как функция высоты и широты. Следовательно, данная разница искажает траекторию движущегося объекта, полученную с использованием инерциального блока в неподвижной точке нахождения лаборатории, и делает трудным интерпретирование результатов. По этой причине данным способом может быть обнаружена только грубая неисправность, возникшая в одном или нескольких акселерометрах инерциального блока.
К тому же информация от гироскопов инерциального блока не полностью отражает информацию, получаемую при реальном движении движущегося объекта вокруг Земли.
Тот способ, которым произведено разложение вращения Земли вокруг осей гироскопов, отличается в зависимости от того, расположен ли инерциальный блок в точке с неизменными координатами (как при комбинированном моделировании в лаборатории) или же он находится на борту движущегося объекта, перемещающегося вокруг Земли. Влияние этого неполного отражения данных усложняет анализ полученных результатов комбинированного моделирования.
Кроме того, имитатор движения должен иметь эксплуатационные параметры динамики углового движения, превышающие или равные требуемым вдоль всей траектории движущегося объекта, что может потребовать очень технически сложного и очень дорогостоящего имитатора движения.
Раскрытие изобретения
Задача настоящего изобретения состоит в предложении способа проверки функционирования инерциального блока движущегося объекта, причем блок установлен на имитаторе движения и в реальном времени выдает измеренные инерциальные данные движения, моделируемого имитатором движения, при этом указанный способ включает в себя:
- выполнение теоретического моделирования инерциального блока, расположенного на имитаторе движения, при этом на вход теоретического моделирования подают в реальном времени кинематические данные, выдаваемые в действительности имитатором движения, а в результате выполнения теоретического моделирования выдают в реальном времени теоретические инерциальные данные, представляющие собой указанные измеренные инерциальные данные, имитирующие данные измерений от инерциального блока на имитаторе движения;
- выполнение имитационного моделирования, включающего в себя моделирование инерциального блока в реальной навигационной обстановке, при этом на вход имитационного моделирования подают в реальном времени команды управления, а в результате выполнения имитационного моделирования выдают в реальном времени имитационные инерциальные данные, представляющие собой выходные данные от инерциального блока в указанной реальной навигационной обстановке, причем при указанном имитационном моделировании используют команды управления для расчета траектории движущегося объекта с применением инерциапьного блока;
- вычисление команд управления как функции измеренных инерциальных данных, имитационных инерциальных данных и теоретических инерциальных данных, и
- проверку правильности функционирования инерциального блока путем сравнения траектории движущегося объекта, полученной с применением инерциального блока, с заданной эталонной траекторией
Предложенным способом получают траекторию движущегося объекта, которая очень близка к реальности и не затрагивается проблемой, связанной с проведением измерений в неподвижной точке. Таким образом, способ позволяет проводить проверку того, имеет ли инерциальный блок характеристики, соответствующие требованиям, следствием чего является усовершенствование в отношении качества и стоимости.
Измеренные инерциальные данные преимущественно включают в себя акселерометрическую информацию, получаемую от акселерометров указанного инерциального блока, а теоретические инерциальные данные включают в себя теоретическую акселерометрическую информацию
Таким образом, могут быть обнаружены любые возможные неисправности, причиной которых являются акселерометры инерциального блока.
Измеренные инерциальные данные преимущественно также включают в себя гироскопическую информацию от гироскопов указанного инерциального блока, теоретические инерциальные данные включают в себя теоретическую гироскопическую информацию, а имитационные инерциальные данные включают в себя полученную имитационным моделированием гироскопическую информацию и полученную имитационным моделированием акселерометрическую информацию.
Таким образом, используемая для вычисления команд управления информация от акселерометров и гироскопов отражает ту информацию, которая предоставлялась бы инерциальным блоком, расположенным на борту движущегося объекта при его перемещении вдоль траектории вокруг Земли. Это происходит из-за того, что информация от акселерометров и гироскопов содержит акселерометрическую и гироскопическую информацию от инерциального блока и дополняющую информацию, вычисленную в реальном времени путем построения теоретической модели и имитации.
В одном из вариантов осуществления настоящего изобретения указанные команды управления вычисляются как функция инерциальных данных I, определяемых сложением измеренных инерциальных данных R и имитационных инерциальных данных Т2, и вычитанием теоретических инерциальных данных Т1 (другими словами, по формуле I=T2-T1+R).
Таким образом, для переходов траектории с высокими динамическими параметрами может быть использован недостаточно определенный имитатор движения. На основании принципа I=T2-T1+R, поскольку величины R и Т1 зависят от движения, моделируемого имитатором движения, то они остаются когерентными, даже если имитатор выполняет команду неправильно. Это позволяет вычислять точную траекторию движущегося объекта с меньшими затратами
Инерциальный блок может считаться работающим правильно, если разница между инерциальными данными I и имитационными инерциальными данными Т2 не превышает заранее установленного порогового значения (другими словами, когда справедливо неравенство: |I-T2|≤ε).
Таким образом, проверка достоверности функционирования инерциального блока может быть проведена эффективно и с очень высокой точностью
Способ в соответствии с изобретением также включает в себя моделирование опережения по фазе, на вход которого в реальном времени подают входные кинематические команды от имитационного моделирования, а в результате выдают выходные кинематические команды на имитатор движения для компенсации задержки исполнения, присущей указанному имитатору движения.
Таким образом, могут быть скомпенсированы задержки исполнения, что позволяет всем параметрам оставаться в фазе для обеспечения гарантии того, что одновременное применение инерциального блока и любых других датчиков на имитаторе движения является репрезентативным.
Указанные входные кинематические команды преимущественно имеют параметры, синхронные с параметрами кинематических данных, и амплитуды указанных кинематических данных и указанных входных кинематических команд преимущественно когерентны.
Таким образом, кинематические данные соответствуют движению, в действительности моделируемому имитатором движения, что позволяет осуществить имитацию реального инерциального блока в фазе с кинематикой движущегося объекта. Это гарантирует, что применение инерциального блока репрезентативно, и обеспечивает синхронность относительно кинематики движущегося объекта для любых других датчиков, установленных на имитаторе движения одновременно с инерциальным блоком.
Предложенный способ преимущественно также включает в себя маскировочное моделирование, выполняемое после имитационного моделирования и перед моделированием опережения по фазе, при этом на вход маскировочного моделирования подают в реальном времени входные кинематические команды, а в результате выполнения маскировочного моделирования выдают маскировочные кинематические команды на моделирование опережения по фазе с целью маскирования, по меньшей мере, некоторых из фаз движения.
Таким образом, может быть получена траектория, для которой угловой диапазон перемещения движущегося объекта превышает диапазон, разрешенный имитатором движения.
Согласно одному из отличительных признаков по меньшей мере некоторые из маскировочных кинематических команд зависят от внутренней для маскировочного моделирования закономерности, которая не зависит от входных кинематических команд.
Это позволяет с использованием имитатора движения, имеющего ограниченный диапазон углового перемещения, рассчитать траекторию, при которой движущийся объект может выполнять движение по ряду петель или замкнутых контуров
Изобретение также относится к системе проверки функционирования инерциального блока движущегося объекта, причем блок установлен на имитаторе движения и в реальном времени выдает измеренные инерциальные данные движения, моделируемого указанным имитатором движения, причем указанная система содержит:
- теоретическую модель, включающую в себя моделирование инерциального блока, расположенного на имитаторе движения, при этом на вход теоретической модели в реальном времени подаются кинематические данные, выдаваемые в действительности имитатором движения, а указанная теоретическая модель выдает в реальном времени теоретические инерциальные данные, представляющие собой указанные измеренные инерциальные данные, имитирующие данные измерений от инерциального блока на имитаторе движения;
- имитационную модель, включающую в себя моделирование инерциального блока в реальной навигационной обстановке, при этом на вход имитационной модели подаются в реальном времени команды управления, а указанная имитационная модель выдает в реальном времени имитационные инерциальные данные, представляющие собой выходные данные от инерциального блока в указанной реальной навигационной обстановке, причем указанная имитационная модель использует команды управления для расчета траектории движущегося объекта с применением инерциального блока.
- вычислительные средства для вычисления команд управления как функции измеренных инерциальных данных, имитационных инерциальных данных и теоретических инерциальных данных;
- средства проверки для проверки правильности функционирования инерциального блока путем сравнения траектории движущегося объекта, полученной с применением инерциального блока, с заданной эталонной траекторией.
Вычислительные средства выполнены с возможностью определения указанных команд управления как функции инерциальных данных I, определенных вычитанием теоретических инерциальных данных Т1 из суммы измеренных инерциальных данных R и имитационных инерциальных данных Т2.
Средства проверки определяют функционирование инерциального блока как правильное, если разница между инерциальными данными и имитационными инерциальными данными не превышает заранее установленного порогового значения
Система также содержит модель опережения по фазе, на вход которой от имитационной модели подаются в реальном времени входные кинематические команды и которая выдает выходные кинематические команды на имитатор движения для компенсации задержки исполнения, присущей указанному имитатору движения
Система содержит также маскировочную модель, расположенную между указанной имитационной моделью и указанной моделью опережения по фазе таким образом, что на вход маскировочной модели подаются в реальном времени входные кинематические команды, при этом маскировочная модель выдает маскировочные кинематические команды на модель опережения по фазе с целью маскирования, по меньшей мере, некоторых из фаз движения.
Изобретение также относится к компьютерной программе, содержащей набор кодовых команд для осуществления способа управления, имеющего по меньшей мере один из вышеперечисленных отличительных признаков, при ее выполнении на ЭВМ.
Краткое описание чертежей
Другие отличительные признаки и преимущества предложенных устройства и способа более подробно объясняются в описании, приведенном ниже в качестве неограничивающего иллюстративного примера со ссылками на сопроводительные чертежи, на которых:
На фиг.1 схематически показана предложенная система проверки функционирования для проверки функционирования инерциального блока движущегося объекта.
На фиг.2 в очень схематизированном виде показан один пример системы проверки функционирования, проиллюстрированной на фиг.1.
На фиг 3-5 показаны различные варианты осуществления изобретения.
На фиг.6 схематически проиллюстрирован один пример траектории движущегося объекта.
Осуществление изобретения
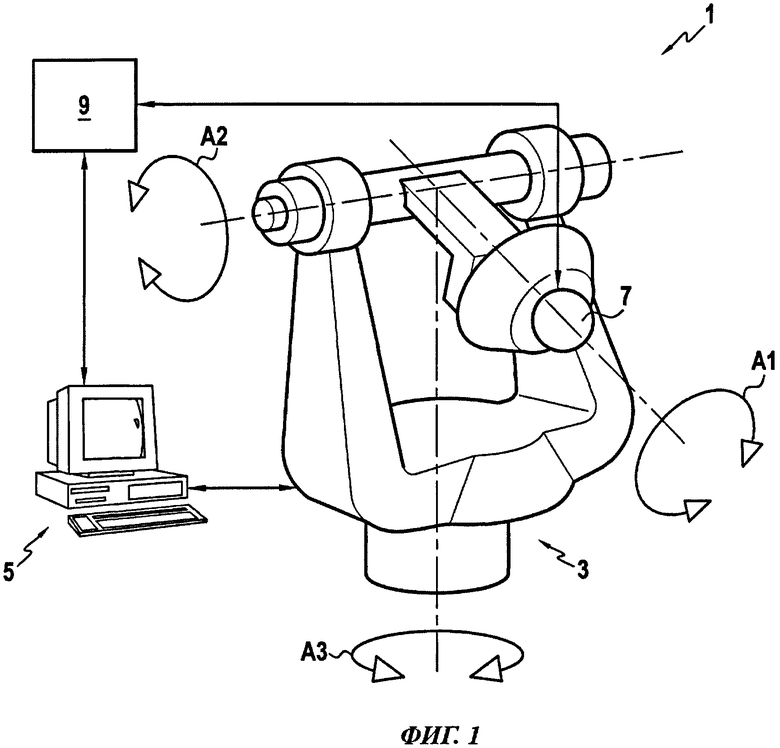
На фиг.1 схематически показана система 1 проверки функционирования для проверки функционирования инерциального блока движущегося объекта. Эта система 1 содержит имитатор 3 движения, присоединенный к устройству электронной обработки данных, или ЭВМ 5, используемой для исполнения набора команд программы для электронной обработки данных, выполненной с возможностью реализации предложенного способа
Имитатор 3 движения может производить угловые перемещения вокруг оси А1 крена, оси А2 тангажа и оси A3 рыскания. Соответственно, за счет наличия инерциального блока 7 имитатор 3 движения может выдавать на него угловые перемещения вокруг оси А1 крена, оси А2 тангажа и оси A3 рыскания. Отметим, что инерциальный блок 7 может быть установлен на самом имитаторе 3 движения, на движущемся объекте (не показан) или на, по меньшей мере, части движущегося объекта
Система 1 проверки функционирования, кроме того, содержит бортовой компьютер 9 движущегося объекта, присоединенный к инерциальному блоку 7 и к ЭВМ 5.
Следует отметить, что различные соединения между ЭВМ 5, имитатором 3 движения, бортовым компьютером 9 и инерциальным блоком 7 могут быть выполнены электрическими или оптическими кабелями, при помощи радиосигналов или с помощью иных средств.
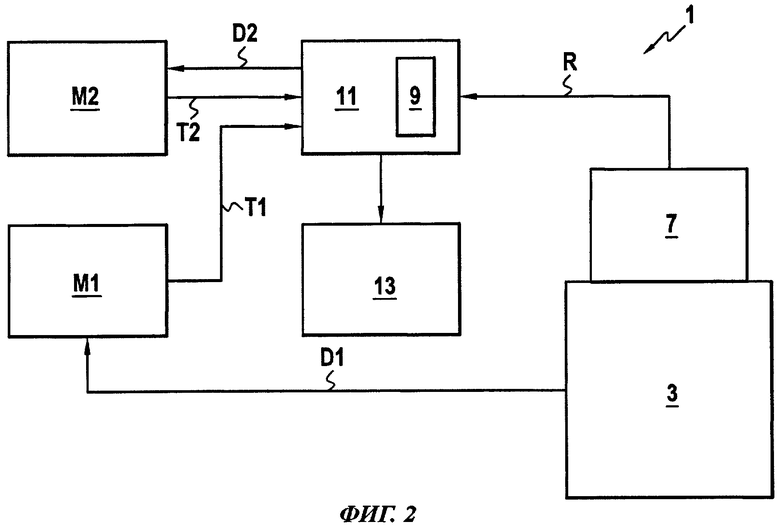
На фиг.2 в сильно схематизированном виде проиллюстрирован один пример предложенной системы 1 проверки функционирования для проверки функционирования инерциального блока 7 движущегося объекта (не показан).
Следует отметить, что на фиг.2 также проиллюстрированы основные шаги предложенного способа управления
Данный способ или система используются в реальном комбинированном моделировании с замкнутым контуром с использованием реальных подсистем (инерциального блока 7, имитатора 3 движения, бортового компьютера 9 движущегося объекта и, возможно, по меньшей мере, части движущегося объекта) и числовых моделей других подсистем (например, подсистемы приведения в движение движущегося объекта) и окружающей среды (атмосферы). Выходные данные реальных подсистем являются входными данными для числовых моделей, а выходные данные числовых моделей являются входными данными для реальных подсистем.
Инерциальный блок 7 установлен на имитаторе 3 движения (отдельно или на по меньшей мере части движущегося объекта) и в реальном времени выдает измеренные инерциальные данные R (т.е. реальные инерциальные данные), отражающие движение, которое моделируется имитатором 3 движения и воспроизводит угловые движения движущегося объекта в переводе на единицы перемещения, скорости и ускорения. Эти измеренные инерциальные данные R поступают от гироскопов (скоростных гироскопов или свободных гироскопов) и акселерометров (не показаны) инерциального блока 7 и в целом позволяют бортовому компьютеру 9 движущегося объекта определять его местоположение, управлять им и задавать его направление.
Эта система 1 управления, кроме того, содержит теоретическую модель М1, имитационную модель М2, вычислительные средства 11 и средства проверки 13. Теоретическая модель М1 и имитационная модель М2 могут быть включены в устройство 5 электронной обработки данных, показанное на фиг.1. Наряду с этим вычислительные средства 11 включают в свой состав бортовой компьютер 9 движущегося объекта.
Комбинированное моделирование протекает в реальном времени. Таким образом, вычисления и обмен данными между бортовым компьютером 9 движущегося объекта и теоретической моделью М1, имитационной моделью М2 и инерциальным блоком 7 осуществляются с реальной частотой, которая определяет таймирование операций, выполняемых бортовым компьютером 9 движущегося объекта и, преимущественно, в пределах промежутка времени, меньшего, чем промежуток времени, соответствующий этой частоте, и это справедливо для каждого цикла вычислений.
Теоретическая модель М1 моделирует расположенный на объекте инерциальный блок 7, установленный на имитаторе 3 движения, и на ее вход в реальном времени от имитатора 3 движения подаются кинематические данные D1 (значения положений, скоростей и угловых ускорений, в действительности выдаваемые этим имитатором 3 движения). В результате теоретическая модель М1 в реальном времени выдает вычислительному устройству 11 теоретические инерциальные данные Т1, представляющие собой измеренные инерциальные данные R, имитирующие данные измерений от инерциального блока 7 на имитаторе 3 движения
Имитационная модель М2 имитирует инерциальный блок 7 в реальной навигационной обстановке, и на ее вход в реальном времени от вычислительного устройства 11 подаются данные, или команды D2 управления В ответ имитационная модель М2 в реальном времени выдает имитационные инерциальные данные Т2, представляющие собой выходные данные инерциального блока 7 в реальной навигационной обстановке.
Таким образом, имитационная модель М2 для вычисления траектории движения движущегося объекта с применением инерциального блока 7 использует команды D2 управления
Вычислительное устройство 11 производит расчет команд D2 управления как функции измеренных инерциальных данных R, имитационных инерциальных данных Т2 и теоретических инерциальных данных Т1.
Затем средства проверки 13 могут провести проверку инерциального блока 7 путем сравнения траектории движущегося объекта, полученной с использованием реального инерциального блока 7, с заранее заданной эталонной траекторией.
Заранее заданная эталонная траектория может быть рассчитана полностью численным моделированием, например, только одной имитационной моделью М2, включающей моделирование всего реального оборудования, в том числе бортового компьютера и инерциального блока. Это известно в данной области техники.
Заранее заданная эталонная траектория получена таким известным в области техники способом при помощи полностью числовой имитационной модели, в которой все реальное оборудование, в том числе ЭВМ и инерциальный блок, воспроизводятся численно.
Таким образом, средства проверки 13 в автономном режиме сравнивают заранее заданную эталонную траекторию, полученную полностью численным образом, с траекторией движущегося объекта, полученной системой 1 проверки функционирования с использованием в реальном времени реального инерциального блока 7 и реального бортового компьютера 9. При сравнительной оценке результатов определяется, что либо инерциальный блок 7 функционирует правильно, т.е. он имеет характеристики, удовлетворяющие требованиям, либо что инерциальный блок 7 не в порядке. В частности, если две траектории совмещаются, то инерциальный блок 7 может считаться работающим безукоризненно.
Измеренные инерциальные данные R преимущественно включают акселерометрическую информацию от акселерометров инерциального блока, а также гироскопическую информацию от гироскопов инерциального блока 7. Аналогичным образом, теоретические инерциальные данные Т1 включают теоретическую информацию от акселерометров и теоретическую информацию от гироскопов
Информация от акселерометров реального инерциального блока 7 способствует определению местоположения, управлению и заданию направления движущегося объекта бортовым компьютером 9. Таким образом, потенциально присутствующие в этой информации отклонения могут быть выявлены путем сравнения акселерометрической информации от реального инерциального блока 7 и той же информации из теоретической модели М1.
Кроме того, в состав имитационных инерциальных данных Т2 входят полученная имитационным моделированием информация от гироскопов и полученная имитационным моделированием информация от акселерометров.
Таким образом, информация от акселерометров и гироскопов, используемая для вычисления команд управления, представляет собой ту информацию, которая выдавалась бы инерциальным блоком, расположенным на борту движущегося объекта, по мере того, как он перемещается по этой траектории вокруг Земли. Это происходит потому, что эта информация от акселерометров и гироскопов, наряду с информацией от инерциального блока, расположенной в точке с фиксированными координатами, содержит дополнительную информацию от акселерометров и гироскопов, вычисленную в реальном времени при помощи теоретической модели М1 и имитационной модели М2.
Информация, выдаваемая реальным инерциальным блоком 7, состоит из результатов измерений, выполненных в лабораторной фиксированной точке, и не полностью отражает информацию, которая выдавалась бы инерциальным блоком, находящимся на борту движущегося объекта, перемещающегося вокруг Земли
Более конкретно, теоретические инерциальные данные Т1, рассчитанные с использованием теоретической модели М1, соответствуют теоретическому выражению измерений, которые имитируют данные измерений, выполненных реальным инерциальным блоком 7 в лабораторной неподвижной точке, и являются в высокой степени репрезентативными, поскольку в этом расчете использованы кинематические данные, выданные на реальный инерциальный блок 7. Более того, имитационные инерциальные данные Т2 являются репрезентативным представлением измерений, выполненных инерциальным блоком 7, расположенным на борту движущегося объекта, при его перемещении вокруг Земли
Использование измеренных инерциальных данных R и соответствующих теоретических инерциальных данных Т1 устраняет любую ошибку, вызванную проведением измерений в неподвижной точке. Следовательно, добавление вклада имитационных инерциальных данных Т2 к измеренным инерциальным данным R и теоретическим инерциальным данным Т1 дает в результате траекторию, репрезентативно отражающую реальность и не затрагиваемую проблемой, связанной с осуществлением измерений в неподвижной точке.
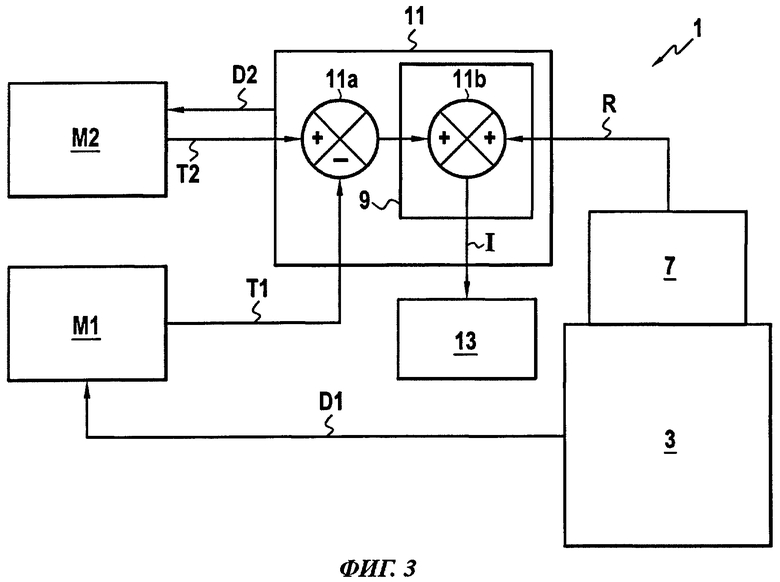
На фиг.3 схематически показан один вариант осуществления системы проверки функционирования, проиллюстрированной на фиг.2. В этом варианте осуществления вычислительные средства 11 содержат первое и второе устройства 11а и 11b для выполнения арифметических операций, выполняющие арифметические операции над измеренными инерциальными данными R, имитационными инерциальными данными Т2 и теоретическими инерциальными данными Т1 для расчета инерциальных данных I.
Соответственно, первое устройство 11а для выполнения арифметических операций вычисляет разницу между имитационными инерциальными данными Т2 и теоретическими инерциальными данными Т1. Второе устройство 11b для выполнения арифметических операций прибавляет полученную в результате разницу (Т2-Т1) к измеренным инерциальным данным R для выражения инерциальных данных I в соответствии с формулой:
I=T2+R-T1.
Затем вычисляются команды D2 управления как функция этих инерциальных данных I, определенных как сумма измеренных инерциальных данных R и имитационных инерциальных данных Т2 за вычетом теоретических инерциальных данных Т1.
Этот вариант осуществления основан на комбинированном моделировании, осуществляемом системой 1 проверки функционирования с использованием разницы между измеренными инерциальными данными R. выдаваемыми инерциальным блоком 7, расположенным на имитаторе 3 движения, и теоретическими инерциальными данными Т1, выдаваемыми теоретической моделью М1.
С учетом формулы I=T2-T1+R, поскольку величины R и Т1 в этой формуле зависят от движения, осуществляемого имитатором 3 движения, то они остаются когерентными, даже если имитатор выполняет команду неправильно. Это означает, что точная траектория движущегося объекта может быть рассчитана с использованием имитатора 3 движения меньшей стоимости.
Наряду с этим, когда проверочное устройство 13 в автономном режиме сравнивает заранее заданную эталонную траекторию и траекторию движущегося объекта, полученную системой 1 проверки функционирования, то достоверность работы инерциального блока 7 является функцией разницы между величинами R и Т1.
Если R=T1, то тогда 1=Т2, что соответствует совмещению двух траекторий, и тогда инерциальный блок 7 функционирует совершенным образом. В этом случае траектория движущегося объекта, полученная с помощью такого инерциального блока 7, очень близка к результатам, полученным с использованием только реального бортового компьютера 9 при комбинированном моделировании.
Если значение R близко к Т1 (например, если |R-T1|=ε, где ε - малая величина), то тогда воспринимается разница между двумя траекториями, но результат остается внутри допустимых пределов, и траектория может считаться соответствующей ожиданиям. Тогда инерциальный блок 7 имеет отличные от номинальных характеристики, но остается в пределах или с допускаемыми отклонениями, оговоренными в его технической документации.
Если значение R сильно отличается от Т1, то тогда две траектории существенно различны, движущийся объект не достигает цели (истинной траектории), но бортовой компьютер 9 считает, что цель достигнута (расчетная траектория). Это указывает на то, что инерциальный блок 7 имеет серьезную неисправность.
Другими словами, инерциальный блок 7 может считаться функционирующим правильно, если разница между инерциальными данными I и имитационными инерциальными данными Т2 не превышает заранее установленного порогового значения (|I-T2|≤ε).
Вместе с тем, путем вычисления теоретического выражения Т1 измерений, имитирующих измерения, выполняемые реальным инерциальным блоком 7 в неподвижной точке, вычитанием Т1 из R и прибавлением вклада имитационных инерциальных данных Т2 (представляющих собой измерения, выполненные инерциальным блоком, расположенным на борту движущегося объекта, перемещающегося вокруг Земли), получают траекторию, репрезентативно отражающую реальность. Следует отметить, что вычитание Т1 из R устраняет вклад реального инерциального блока до ближайшей величины η, где η=|R-T1|, и величина η прямо пропорциональна несовершенству инерциального блока 7.
В данном примере траектории могут быть рассчитаны с помощью имитационной модели М2 с использованием различных допусков инерциального блока 7. Например, для получения сплетения траекторий путем модуляции переменных в пределах их допускаемых отклонений может быть рассчитано конкретное число N траекторий. Если «истинная» траектория, т.е. та, которая получена с реальным инерциальным блоком 7, находится среди этого сплетения, полученного численной имитацией, то тогда инерциальный блок 7 может считаться исправным. В противном случае он испытывает неисправность.
На фиг.4 схематически показан вариант системы 1 проверки функционирования, которая дополнительно содержит модель М3 опережения по фазе, на вход которой в реальном времени от имитационной модели М2 подаются входные данные, или кинематические команды С1, и которая выдает выходные кинематические команды С2 на имитатор 3 движения для компенсации задержки исполнения, присущей имитатору 3 движения
На самом деле система для обеспечения навигации и управления движущимся объектом, как правило, содержит «управляющую» функцию, которая предназначена для выработки команд для приведения в действие средств управления, совместимых с характеристиками движущегося объекта. Это автоматическая функция, использующая инерциальную информацию или данные и, возможно, информацию или данные другого типа (если существует дополнительный, неинерциальный блок), выносящая заключение о выполнении команды, ранее посланной в реальном времени, и, при необходимости, регулирующая уровень следующей команды. Если средства управления реагируют недостаточно быстро, то управляющая функция распознает это и выдает более сильные команды для компенсации этой задержки исполнения
Входные кинематические команды С1 преимущественно имеют параметры, синхронные с параметрами кинематических данных D1. К тому же амплитуды кинематических данных D1 и входных кинематических команд С1 когерентны. Тогда имитация инерциального блока синхронизируется с кинематикой углового движения движущегося объекта, обеспечивая гарантию того, что применение инерциального блока и любых других датчиков, установленных на имитаторе движения, является в одно и то же время репрезентативным
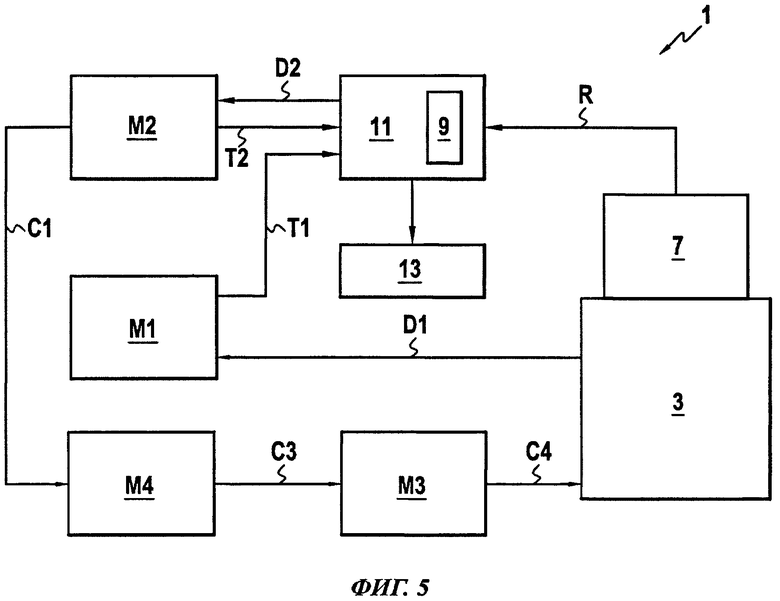
На фиг.5 схематически показан вариант осуществления проиллюстрированной на фиг.4 системы проверки функционирования, которая дополнительно содержит маскировочную модель М4, которая в данном примере расположена после имитационной модели М2 и перед моделью М3 опережения по фазе. Соответственно, на маскировочную модель М4 в реальном времени от имитационной модели М2 подаются входные кинематические команды С1 и она выдает маскировочные кинематические команды С3 на модель М3 опережения по фазе с целью маскирования, по меньшей мере, некоторых из фаз движения движущегося объекта.
Затем модель М3 опережения по фазе выдает на имитатор 3 движения выходные кинематические команды С4, учитывающие маскировочные кинематические команды С3, для выработки траектории, для которой диапазон углового перемещения и/или динамики движущегося объекта превышает диапазон, разрешенный имитатором 3 движения.
Таким образом, угловое перемещение имитатора 3 движения или остановка этого перемещения, намеренно поданная в виде команды от маскировочной модели М4, учтена в измеренных инерциальных данных R и теоретических инерциальных данных Т1, но не оказывает влияния на команды D2 управления.
Согласно проиллюстрированному на фиг.3 примеру и на основании формулы I=T2-T1+R на инерциальные данные I не оказывают влияния никакие угловые перемещения имитатора 3 движения или остановка такого перемещения по команде от маскировочной модели М4
Более того, функция контролирующего наблюдения, реализованная в маскировочной модели М4, ограничивает задаваемый в виде команд диапазон углового перемещения до возникновения аппаратного или программного останова имитатора 3 движения.
Следует обратить внимание на то, что теоретическая модель М1, имитационная модель М2, модель М3 опережения по фазе и/или маскировочная модель М4 могут входить в состав устройства 5 электронной обработки данных, показанного на фиг.1.
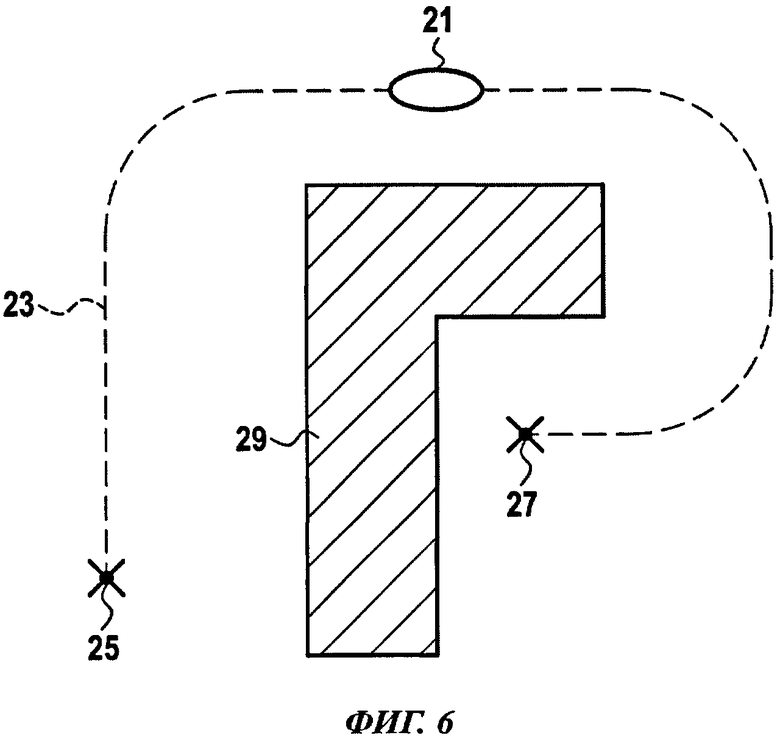
На фиг 6 схематически показан один пример расчета траектории огибания препятствия.
Например, при использовании имитатора 3 движения с недостаточно определенными параметрами, имеющего способность углового перемещения вокруг оси рыскания в диапазоне ±100°, что соответствует угловому отклонению в 200°, может быть рассчитана траектория, имеющая угловое отклонение в 270°. Соответственно, в данном примере движущийся объект 21 может следовать по траектории 23 из исходной точки 25 к точке 27 назначения, огибая препятствие 29 за счет углового отклонения величиной 270°.
В процессе расчета траектории 23 угловое положение оси имитатора 3 движения может изменяться. Например, ось A3 рыскания имитатора 3 движения может управляться независимо от рыскания по курсу движущегося объекта 21.
По меньшей мере некоторые из маскированных кинематических команд С3 преимущественно могут зависеть от закономерности, внутренней для маскировочной модели М4. В частности, внутренняя закономерность не зависит от входных кинематических команд С1. Соответственно, в имитатор 3 движения команда движения может быть введена из маскировочной модели М4 независимо от входных кинематических команд С1, поступающих от имитационной модели М2. Это позволяет рассчитать траекторию, в которой движущийся объект может выполнять множество контуров с имитатором 3 движения, имеющим ограниченный диапазон углового перемещения
Наряду с этим траектория может иметь диапазон в отношении динамических параметров, превышающий диапазон, допускаемый имитатором 3 движения
Например, в случае, если входные кинематические команды С1 для переходного события содержат команду скорости, превышающей те скорости, которые способен выработать имитатор 3 движения, то характеристики кинематических данных D1, в действительности исполняемых имитатором 3 движения, снижаются относительно входных кинематических команд С1. Это недостаточное движение учитывается в измеренных инерциальных данных R и теоретических инерциальных данных Т1. Однако в силу формулы I=T2-T1+R инерциальные данные I не подвергаются влиянию недостаточно движения. Таким образом, ограничение параметров возможных действий имитатора 3 движения не влияет на траекторию.
Настоящее изобретение также относится к программе для ЭВМ, выполненной с возможностью загрузки из сети передачи данных и содержащей набор кодовых команд программы для исполнения шагов предложенного способа управления при его реализации на ЭВМ 5. Эта программа для ЭВМ может быть сохранена на машиночитаемом носителе и выполнена с возможностью ее исполнения микропроцессором. В этой программе может быть использован любой язык программирования, и она может принимать вид исходного кода, объектного кода или кода, промежуточного между исходным кодом и объектным кодом, например, быть в частично скомпилированном виде или в любом другом виде по желанию.
Изобретение также относится к машиночитаемому носителю информации, содержащему команды вышеупомянутой программы для ЭВМ.
Носитель информации может представлять собой любое устройство, способное к хранению программы. Например, этот носитель может представлять собой запоминающее устройство, такое как постоянное запоминающее устройство, например компакт-диск или постоянное запоминающее устройство на электронных микросхемах, или магнитное запоминающее устройство, например флоппи-диск или жесткий диск
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ИНЕРЦИАЛЬНОГО БЛОКА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2009 |
|
RU2483281C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ ТРАЕКТОРИИ ДВИЖУЩЕГОСЯ ТЕЛА | 2010 |
|
RU2530705C2 |
| Способ имитационного статистического моделирования локомотивной интегрированной системы навигации | 2017 |
|
RU2658509C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| Бесплатформенная инерциальная навигационная система подвижного объекта | 2017 |
|
RU2676941C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| Инерциальный навигационный комплекс для высокоскоростного маневренного объекта | 2016 |
|
RU2657293C1 |
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| УСТРОЙСТВО ПРОГРАММНО-АППАРАТНОЙ ИМИТАЦИИ ЛАЗЕРНОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ | 2021 |
|
RU2757856C1 |
Изобретение относится к измерительной технике и может быть использовано в системах управления подвижными объектами. Технический результат - повышение точности. Для достижения данного результата инерциальный блок установлен на имитаторе движения, включающий в себя теоретическое моделирование инерциального блока, расположенного на имитаторе движения. Имитационное моделирование включает в себя моделирование инерциального блока в реальной навигационной обстановке. При этом на вход имитационного моделирования подают команды управления и в результате выполнения имитационного моделирования выдают имитационные инерциальные данные, представляющие собой выходные данные от инерциального блока в заданной или реальной навигационной обстановке, осуществляют формирование команд управления в функции от измеренных инерциальных данных, имитационных инерциальных данных и теоретических инерциальных данных. Проверку правильности функционирования инерциального блока осуществляют путем сравнения траектории движущегося объекта с эталонной траекторией. 2 н. и 12 з.п. ф-лы, 6 ил.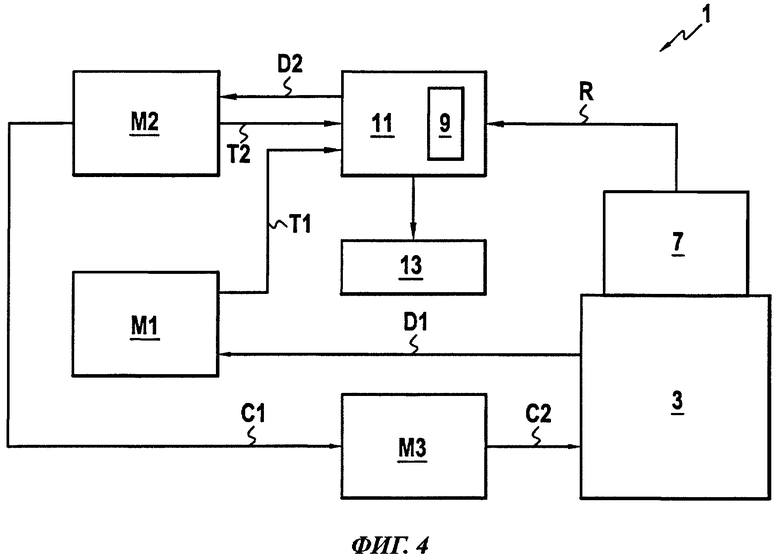
1. Способ проверки функционирования инерциального блока (7) движущегося объекта, причем указанный блок установлен на имитаторе (3) движения и в реальном времени выдает измеренные инерциальные данные (R) движения, моделируемого имитатором (3) движения, отличающийся тем, что включает в себя:
- выполнение теоретического моделирования (M1) инерциального блока (7), расположенного на имитаторе (3) движения, при этом на вход теоретического моделирования подают в реальном времени кинематические данные (D1), выдаваемые в действительности имитатором (3) движения, а в результате выполнения теоретического моделирования выдают в реальном времени теоретические инерциальные данные (Т1), представляющие собой указанные измеренные инерциальные данные (R), имитирующие данные измерений от инерциального блока (7) на имитаторе (3)движения;
- выполнение имитационного моделирования (М2), включающего в себя моделирование инерциального блока в реальной навигационной обстановке, при этом на вход имитационного моделирования подают в реальном времени команды (D2) управления, а в результате выполнения имитационного моделирования выдают в реальном времени имитационные инерциальные данные (Т2), представляющие собой выходные данные от инерциального блока в указанной реальной навигационной обстановке, причем при указанном имитационном моделировании используют команды (D2) управления для расчета траектории движущегося объекта с применением инерциального блока;
- вычисление команд (D2) управления как функции измеренных инерциальных данных (R), имитационных инерциальных данных (Т2) и теоретических инерциальных данных (Т1); и
- проверку правильности функционирования инерциального блока (7) путем сравнения траектории движущегося объекта, полученной с применением инерциального блока, с заданной эталонной траекторией.
2. Способ по п.1, отличающийся тем, что измеренные инерциальные данные (R) включают в себя акселерометрическую информацию, получаемую от акселерометров указанного инерциального блока, а теоретические инерциальные данные (Т1) включают в себя теоретическую акселерометрическую информацию.
3. Способ по п.2, отличающийся тем, что измеренные инерциальные данные (R) также включают в себя гироскопическую информацию от гироскопов указанного инерциального блока, теоретические инерциальные данные (Т1) включают в себя теоретическую гироскопическую информацию, а имитационные инерциальные данные (Т2) включают в себя полученную имитационным моделированием гироскопическую информацию и полученную имитационным моделированием акселерометрическую информацию.
4. Способ по любому из пп.1-3, отличающийся тем, что команды (D2) управления вычисляют как функцию инерциальных данных (I), определяемых вычитанием теоретических инерциальных данных (Т1) из суммы измеренных инерциальных данных (R) и имитационных инерциальных данных (Т2).
5. Способ по п.4, отличающийся тем, что инерциальный блок (7) считают функционирующим правильно, если разница между инерциальными данными (I) и имитационными инерциальными данными (Т2) не превышает заранее установленного порогового значения.
6. Способ по любому из пп.1-3, отличающийся тем, что дополнительно выполняют моделирование (М3) опережения по фазе, при этом на вход моделирования опережения по фазе в реальном времени подают входные кинематические команды (С1) от имитационного моделирования (М2), а в результате выполнения моделирования опережения по фазе выдают в реальном времени выходные кинематические команды (С2) на имитатор (3) движения для компенсации задержки исполнения, присущей указанному имитатору движения.
7. Способ по п.6, отличающийся тем, что входные кинематические команды (С1) имеют параметры, синхронные с параметрами кинематических данных (D1), причем амплитуды кинематических данных (D1) и входных кинематических команд (С1) когерентны.
8. Способ по п.7, отличающийся тем, что дополнительно включает в себя маскировочное моделирование (М4), выполняемое после имитационного моделирования (М2) и перед моделированием (М3) опережения по фазе, при этом на вход маскировочного моделирования подают в реальном времени входные кинематические команды (С1), а в результате выполнения маскировочного моделирования (М4) выдают маскировочные кинематические команды (С3) на моделирование (М3) опережения по фазе с целью маскирования, по меньшей мере, некоторых из фаз движения.
9. Способ по п.8, отличающийся тем, что по меньшей мере некоторые из маскировочных кинематических команд (С3) зависят от внутренней для маскировочного моделирования (М4) закономерности, которая не зависит от входных кинематических команд (С1).
10. Система проверки функционирования инерциального блока (7) движущегося объекта, причем указанный блок установлен на имитаторе (3) движения и в реальном времени выдает измеренные инерциальные данные (R) движения, моделируемого имитатором движения, отличающаяся тем, что содержит:
- теоретическую модель (M1), включающую в себя моделирование инерциального блока (7), расположенного на имитаторе (3) движения, при этом на вход теоретической модели в реальном времени подаются кинематические данные (D1), выдаваемые в действительности имитатором движения, а указанная теоретическая модель выдает в реальном времени теоретические инерциальные данные (Т1), представляющие собой указанные измеренные инерциальные данные (R), имитирующие данные измерений от инерциального блока на имитаторе движения;
- имитационную модель (М2), включающую в себя моделирование инерциального блока в реальной навигационной обстановке, при этом на вход имитационной модели подаются в реальном времени команды (D2) управления, а указанная имитационная модель выдает в реальном времени имитационные инерциальные данные (Т2), представляющие собой выходные данные от инерциального блока в указанной реальной навигационной обстановке, причем указанная имитационная модель использует команды (D2) управления для расчета траектории движущегося объекта с применением инерциального блока;
- вычислительные средства (11) для вычисления команд (D2) управления как функции измеренных инерциальных данных (R), имитационных инерциальных данных (Т2) и теоретических инерциальных данных (Т1);
- средства (13) проверки для проверки правильности функционирования инерциального блока путем сравнения траектории движущегося объекта, полученной с применением инерциального блока, с заданной эталонной траекторией.
11. Система по п.10, отличающаяся тем, что вычислительные средства (11) выполнены с возможностью определения команд (D2) управления как функции инерциальных данных (I), определяемых вычитанием теоретических инерциальных данных (Т1) из суммы измеренных инерциальных данных (R) и имитационных инерциальных данных (Т2).
12. Система по п.10, отличающаяся тем, что средства (13) проверки определяют функционирование инерциального блока как правильное, если разница между инерциальными данными (I) и имитационными инерциальными данными (Т2) не превышает заранее установленного порогового значения.
13. Система по любому из пп.10-12, отличающаяся тем, что содержит модель (М3) опережения по фазе, на вход которой от имитационной модели (М2) подаются в реальном времени входные кинематические команды (С1), и которая выдает выходные кинематические команды (С2) на имитатор движения для компенсации задержки исполнения, присущей указанному имитатору движения.
14. Система по п.12, отличающаяся тем, что содержит маскировочную модель (М4), расположенную между имитационной моделью (М2) и моделью (М3) опережения по фазе, при этом на вход маскировочной модели подаются в реальном времени входные кинематические команды (С1), а маскировочная модель (М4) выдает маскировочные кинематические команды (С3) на модель (М3) опережения по фазе с целью маскирования, по меньшей мере, некоторых из фаз движения.
| WILSON V | |||
| ЕТ AL: UNSTEADY RANS METHOD FOR SHIP MOTIONS WITH APPLICATION TO ROLL FOR A SURFACE COMBATANT / COMPUTERS AND FLUIDS, PERFMON PRESS, NEW YORK, NY, GB, VOL.35, NO 5, JUNE 2005, PAGES 501-524 | |||
| LI D | |||
| ЕТ AL: MODELING, SIMULATION, AND CONTROL OF A HYDRAULIC STEWART PLATFORM/ PROCEEDINGS - IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND |

