Область техники, к которой относится изобретение
Изобретение относится к области приборостроения и может быть использовано при создании инерциального навигационного комплекса для высокоскоростного маневренного объекта.
Используемые термины
Для существенного сокращения текста описания и формулы целесообразно перечислить используемые термины.
Подвижный носитель - движущийся объект: корабль, подводная лодка, летательный аппарат, на борту которого установлен подвижный объект.
Подвижный объект - объект или группа подвижных объектов, стартующих с подвижного носителя и выполняющих основную функцию, являющихся высокоскоростными и маневренными, для управления которыми предназначено решение задачи навигации с требуемой точностью.
Полюс объекта - точка, для которой определяются переменные его поступательного движения - это, как правило, начало связанной с ним системы координат; в частности, полюсом объекта может быть его центр масс.
Первичная информация - совокупность сигналов инерциальных датчиков, зависящих от конструктивных характеристик и принципа работы датчиков.
Связанная система координат - система координат, связанная с осями чувствительности (измерительными осями) инерциальных датчиков.
Инерциальная информация - совокупность переменных: в частности, три проекции вектора абсолютной угловой скорости, и три проекции вектора кажущегося ускорения полюса объекта на оси связанной системы координат, в которой установлены специальным образом датчики углового и поступательного движений.
Навигационная информация - переменные, на основе которых осуществляется управление движением объекта - это переменные ориентации объекта от базовой (например, связанной с Землей) к связанной с объектом системе координат (например, девять направляющих косинусов), три проекции вектора скорости полюса объекта и три проекции радиуса-вектора полюса объекта (то есть три координаты объекта) в базовой системе координат.
Встроенный компьютер - вычислительное устройство, встроенное в инерциальный датчик или входящее в состав бортового компьютера, в котором хранится информация о структуре инерциального датчика и в который инсталлировано программное обеспечение для процедуры определения компонент инерциальной информации на основе первичной информации (сигнала датчика), то есть входом его являются переменные первичной информации, а выходом является переменная инерциальной информации.
Локальный компьютер - вычислительное устройство, встроенное в блок инерциальной информации или входящее в состав бортового компьютера, в котором хранится информация о структуре блока инерциальных датчиков и в который инсталлировано программное обеспечение, входом в которое являются переменные проекции векторов инерциальной информации на измерительные оси датчиков, а выходом являются переменные проекции этих векторов на оси связанной с объектом системы координат.
Бортовой компьютер - вычислительное устройство, в котором хранится априорная информация о гравитационном поле (Земли), базовом вращении (вращении Земли) и начальных условиях об ориентации, движении и положении объекта, входом которого являются переменные инерциальной информации, а выходом - переменные навигационной информации и в который инсталлировано программное обеспечение для процедуры функционирования бесплатформенной инерциальной навигационной системы, то есть определения переменных навигационной информации на основе переменных инерциальной и априорной информации; следует различать бортовой компьютер подвижного носителя и бортовой компьютер подвижного объекта.
Инерциальный триэдр - блок инерциальных датчиков, измерительные оси которых являются некомпланарными (в частности, взаимно ортогональными); при этом на каждой из трех осей установлены в минимальной конфигурации: один датчик угловой скорости и один акселерометр; в средней конфигурации: один датчик угловой скорости, один датчик углового ускорения и один акселерометр; в расширенной конфигурации: N+1 датчик угловой скорости, N+1 датчик углового ускорения, N+1 акселерометр - такой триэдр имеет избыточность первичной информации, равную N, при N большем единице.
Блок инерциальной информации - устройство, включающее в себя инерциальный триэдр и локальный компьютер, к входу которого подключены выходы датчиков инерциального триэдра по беспроводной технологии передачи данных, и в которое инсталлировано программное обеспечение для процедуры определения переменных инерциальной информации, являющиеся его выходом.
Бесплатформенная инерциальная навигационная система - электро-электронно-механическое устройство, состоящее из блока инерциальной информации, подключенного к бортовому компьютеру, выходом которого являются переменные навигационной информации, поступающие на вход системы управления движением объекта: в описании и формуле - это навигационная система подвижного объекта.
Инерциальная навигационная система - электро-электронно-механическое устройство, состоящее из блока инерциальной информации, который может быть не связан жестко с объектом и иметь структуру, отличающуюся от структуры блока инерциальной информации бесплатформенной инерциальной навигационной системы, подключенного к бортовому компьютеру, выходом которого являются переменные навигационной информации, поступающие на вход системы управления движением объекта: в описании и формуле - это навигационная система подвижного носителя, которая может быть полуаналитической, аналитической, геометрической или бесплатформенной, комплексируемой и корректируемой в соответствии с классом носителя (корабль, подводная лодка, стратегический бомбардировщик и т.п.) и имеющимися на его борту средствами.
Функционирование бесплатформенной инерциальной навигационной системы - процесс получения навигационной информации об ориентации подвижного объекта в системе координат, в которой решается задача навигации и управления им (например, направляющих косинусах от земной системы координат к системе координат подвижного объекта), движении подвижного объекта (проекций вектора скорости полюса подвижного объекта в земной системе координат) и положении подвижного объекта (проекций радиуса-вектора полюса подвижного объекта в земной системе координат) на основе обработки первичной информации с привлечением априорной информации о гравитационном поле Земли, вращении Земли и начальных ориентации, движении и положении подвижного объекта относительно Земли.
Функционирование инерциальной навигационной системы - процесс получения навигационной информации об ориентации подвижного носителя в системе координат, в которой решается задача навигации и управления им (например, направляющих косинусах от земной системы координат к системе координат подвижного носителя), движении подвижного носителя (проекций вектора скорости полюса подвижного носителя в земной системе координат) и положении подвижного носителя (проекций радиуса-вектора полюса подвижного носителя в земной системе координат) на основе обработки первичной информации с привлечением априорной информации о гравитационном поле Земли, вращении Земли и начальных ориентации, движении и положении подвижного объекта относительно Земли.
Массогеометрические характеристики объекта - десять величин: масса подвижного объекта, три координаты его центра масс, три его осевых момента инерции и три его центробежных момента инерции в связанной с подвижным объектом системе координат; в частности, при динамически отбалансированном подвижном объекте центробежные моменты инерции полагаются нулевыми с точностью до погрешностей балансировки; указанные величины могут определяться либо по информации бесплатформенной инерциальной навигационной системы, либо на основе специально создаваемых малых калиброванных возмущений объекта: например, импульсы сопел малой расчетной тяги, создающие калиброванные силы и моменты на таком интервале времени движения объекта, на котором возможно измерить эти силы и моменты, а кроме того, определяется движение центра масс по объекту, вызванное, например, расходом топлива.
Уровень техники
Известен навигационный комплекс [1], включающий в себя бесплатформенную инерциальную навигационную систему на объекте, устройство вычисления скорости и координат, трехканальный блок датчиков линейных ускорений, трехканальный блок датчиков угловых скоростей. Этот навигационный комплекс эффективен для малоразмерных беспилотных летательных аппаратов.
Недостатком этого навигационного комплекса является невозможность его использования для навигационных измерений высокоскоростного маневренного подвижного объекта, стартующего с подвижного носителя, и работающего длительное время.
Известен способ построения инерциальной навигационной системы [2], заключающийся в установке на объекте бесплатформенной инерциальной навигационной системы, состоящей из блока инерциальной информации, в состав которого входят один датчик углового движения (например, датчик угловой скорости) и один датчик поступательного движения (например, акселерометр), блок инерциальной информации жестко закреплен на оси, приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости относительно объекта, во время движения объекта измеряют сигналы указанных датчиков в окрестностях координатных осей связанной с объектом системы координат и далее обрабатывают их с привлечением необходимой априорной информации для получения переменных навигационной информации. Известны также и усовершенствования [3, 4, 5] этого способа путем установки датчиков сил на оси вращения и соответствующей обработки измерительной информации. Известен способ выставки инерциальных чувствительных элементов [6], заключающийся в изменении ориентации датчиков относительно платформы по критерию минимума погрешности модуля вектора скорости центра масс объекта во время его движения. Известен способ выставки акселерометров [7], заключающийся в изменении ориентации акселерометров относительно платформы по критерию минимума погрешности модуля вектора ускорения центра масс объекта во время его движения на основе информации с дополнительных акселерометров, установленных жестко на объекте.
В изобретениях [2, 3, 4, 5] по способам построения инерциальных навигационных систем зафиксирована идея уменьшения количества инерциальных датчиков в системе путем принудительного вращения акселерометра относительно стабилизированной платформы или принудительного вращения относительно объекта двух датчиков, один из которых - акселерометр, второй - датчик угловой скорости. Если в дополнение к этим способам установить на оси вращения датчики сил, то измеряемая ими информация и ее обработка позволит получить избыточную инерциальную информацию с целью использования ее для повышения точности навигационной информации. Область применения таких систем ограничена объектами с медленно-меняющимися или с программно-меняющимися кинематическими характеристиками.
В изобретениях [6, 7] зафиксирована идея по способам автономного повышения точности инерциальных навигационных систем путем оптимального разворота блока неидеальных акселерометров относительно стабилизированной платформы или оптимального разворота относительно объекта неидеального блока инерциальной информации, состоящего из трех акселерометров и трех датчиков угловой скорости на основе информации дополнительного блока инерциальной информации, неподвижно закрепленного на объекте. Критерии оптимальности разворота: минимум суммарной погрешности навигационной информации в конечный момент времени или в текущий момент времени движения объекта. При выполнении математического описания для указанных изобретений использован аппарат оптимального управления.
Известна инерциальная навигационная система [8], состоящая из блока инерциальной информации, в состав которого входят один датчик углового движения (например, датчик угловой скорости) и один датчик поступательного движения (например, акселерометр), блок инерциальной информации жестко закреплен на оси, приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости относительно объекта, во время движения объекта измеряют сигналы указанных датчиков в окрестностях координатных осей связанной с объектом системы координат и далее обрабатывают их с привлечением необходимой априорной информации для получения переменных навигационной информации. Известно также и усовершенствование [9] этой инерциальной навигационной системы путем введения дополнительных устройств и соответствующей обработки измерительной информации. Известна инерциальная навигационная система для объектов с плоскими траекториями центров масс [10], в которой реализована идея изменения ориентации датчиков относительно платформы по критерию минимума погрешности модуля вектора скорости центра масс объекта. Известно устройство для выставки инерциальных датчиков [11], в котором реализована идея изменения ориентации датчиков относительно объекта по критерию минимума погрешности модуля вектора угловой скорости или модуля вектора кажущегося ускорения центра масс объекта во время его движения на основе информации от дополнительных неподвижных относительно объекта инерциальных датчиков.
В изобретениях [8, 9, 10, 11] зафиксирована идея автономного повышения точности инерциальных навигационных систем путем оптимального разворота блока неидеальных акселерометров относительно стабилизированной платформы или оптимального разворота относительно объекта неидеального блока инерциальной информации, состоящего из трех акселерометров и трех датчиков угловой скорости на основе информации дополнительного неподвижного относительно объекта блока инерциальной информации. Критерии оптимальности разворота: минимум суммарной погрешности навигационной информации в конечный момент времени или в текущий момент времени движения объекта. При выполнении математического описания для указанных изобретений использован аппарат оптимального управления и аппарат минимизации функции трех переменных.
Идея принудительного вращения блока инерциальной информации относительно объекта и идея автономного повышения точности бесплатформенной инерциальной навигационной системы путем оптимального разворота блока инерциальной информации относительно объекта являются наводящими на идею построения бесплатформенной инерциальной навигационной системы со структурой, позволяющей повышать точность навигационной информации. Но существенным недостатком способов [2, 3, 4, 5, 6, 7] и устройств выставки инерциальных датчиков [8, 9, 10, 11] является невозможность их использования для навигационных измерений высокоскоростного маневренного подвижного объекта, стартующего с подвижного носителя.
Раскрытие изобретения
Задачей предлагаемого устройства является обеспечение функциональных и точных навигационных измерений для высокоскоростного маневренного подвижного объекта, стартующего с подвижного носителя.
Предлагаемое устройство названо авторами «Инерциальный навигационный комплекс для высокоскоростного маневренного объекта» по следующим существенным обстоятельствам. Если сказать кратко, то предлагаемым устройством решается задача создания навигационной системы повышенной точности путем использования структурно-алгоритмических способов, что необходимо для высокоскоростного маневренного объекта. А если сказать несколько подробнее, то для объекта указанного класса очень жестко требуется совместное выполнение следующих условий: 1) бесплатформенная инерциальная навигационная система подвижного объекта должна быть построена на предельно точных на данном уровне развития техники инерциальных датчиках (особенно должны быть предельно точные датчики угловой скорости); 2) бесплатформенная инерциальная навигационная система подвижного объекта должна состоять из двух блоков инерциальной информации, один из которых классически неподвижный относительно объекта с избыточным количеством инерциальных датчиков, а второй подвижный относительно объекта: разворачиваемый по критерию минимизации погрешностей навигационной информации, информация о погрешностях системы должна анализироваться в течение времени движения объекта и для управления его движением должна подаваться навигационная информация, имеющая наименьшие погрешности; 3) должны быть предельно точно определены начальные условия для функционирования бесплатформенной инерциальной навигационной системы подвижного объекта на основе информации с наземной навигационной системы, то есть предельно точно должна быть реализована процедура начальной выставки; 4) должна быть предельно точно реализована процедура калибровки обоих блоков инерциальной информации подвижного объекта на основе информации навигационной системы подвижного носителя перед стартом с него подвижного объекта; 5) в течение всего времени движения подвижного объекта должна быть реализована процедура диагностики информационных нарушений обоих блоков инерциальной информации подвижного объекта; 6) в течение всего времени движения подвижного объекта должна быть реализована процедура оценивания переменных инерциальной информации обоих блоков подвижного объекта на основе учета моделей погрешностей инерциальных датчиков с целью повышения точности навигационной информации; 7) в течение всего времени движения подвижного объекта должны быть реализованы процедуры анализа точности и повышения точности обоих блоков подвижного объекта на основе учета моделей погрешностей инерциальных датчиков с целью повышения точности навигационной информации; 8) в течение всего времени движения подвижного объекта должна быть реализована процедура определения переменных величин массогеометрических характеристик подвижного объекта на основе информации бесплатформенной инерциальной навигационной системы подвижного объекта с целью передачи этих величин в систему управления подвижным объектом; 9) на борту подвижного объекта должны быть устройства неавтономной навигации для случая аварийной ситуации с бесплатформенной инерциальной навигационной системой подвижного объекта и, начиная с критического момента времени должна быть реализована процедура определения навигационной информации на основе этих устройств неавтономной навигации; 10) должно быть реализовано согласование всех стадий движения подвижного объекта жесткими требованиями по точности вычисляемой в его бортовом компьютере навигационной информации. Поэтому в дальнейшем тексте описания предлагаемого устройства авторами акцентируется внимание на требовании комплексного выполнения взаимно согласованных процедур начальной выставки, калибровки, диагностики, оценивания, анализа и повышения точности, определения массогеометрических характеристик (и в случае аварийной ситуации использования устройств неавтономной навигации) на основе навигационной информации, получаемой с бесплатформенной инерциальной навигационной системы подвижного объекта, построенной на предельно точных инерциальных датчиках. При некорректном выполнении хотя бы одного из перечисленных условий навигационные измерения для высокоскоростного маневренного объекта не обеспечат требуемый эффект от его системы управления.
Поставленная задача решается тем, что инерциальная навигационная система подвижного носителя состоит из блока инерциальной информации подвижного носителя и бортового компьютера подвижного носителя и генерирует навигационную информацию для управления подвижным носителем, бесплатформенная инерциальная навигационная система подвижного объекта генерирует навигационную информацию для управления подвижным объектом после его старта с подвижного носителя и состоит из бортового компьютера подвижного объекта, первого блока инерциальной информации подвижного объекта, жестко закрепленного на подвижном объекте, и второго блока инерциальной информации подвижного объекта, жестко закрепленного на оси, помещенной в двухстепенный подвес, приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости относительно подвижного объекта, датчиком угла, измеряющим угловое положение оси вращения относительно ее подвеса, а следовательно, - и корпуса объекта, по осям подвеса установлены датчики углов, подключенные к входу бортового компьютера подвижного объекта, и управляемые двигатели разворота осей карданова подвеса, подключенные к выходу бортового компьютера подвижного объекта, в момент времени t* из бортового компьютера подвижного носителя в бортовой компьютер подвижного объекта подают значения переменных навигационной информации в этот момент времени, пересчитанные на оси системы координат, используемые для навигации и управления объектом, а после старта подвижного объекта управление его движением осуществляют на основе навигационной информации, генерируемой бесплатформенной инерциальной навигационной системой подвижного объекта, с момента времени t0 старта подвижного объекта до момента времени t1 совершения им маневра приводят во вращение второй блок инерциальной информации подвижного объекта с угловой скоростью, величину которой определяют из условия минимизации погрешностей датчиков второго блока инерциальной информации подвижного объекта, а перед совершением маневра подвижного объекта останавливают вращение оси и с помощью управляемых двигателей разворота, установленных по осям двухстепенного подвеса, ориентируют эту ось с закрепленным на ней вторым блоком инерциальной информации подвижного объекта на углы относительно подвижного объекта, величины которых определяют из условия минимизации погрешностей, накопленных датчиками второго блока инерциальной информации подвижного объекта за интервал времени [t0; t1] с использованием информации первого блока инерциальной информации подвижного объекта, с момента времени t0 до момента времени окончания движения подвижного объекта управление его движением осуществляют на основе навигационной информации, генерируемой бесплатформенной инерциальной навигационной системой подвижного объекта.
Первый блок инерциальной информации бесплатформенной инерциальной навигационной системы подвижного объекта должен быть укомплектован инерциальными датчиками углового движения и инерциальными датчиками поступательного движения с избыточностью, равной N, и в бортовой компьютер подвижного объекта инсталлируют программное обеспечение для процедуры определения переменных навигационной информации с использованием указанной избыточности и в течение времени движения подвижного объекта реализуют эту процедуру.
Должно быть разработано программное обеспечение для процедуры калибровки обоих блоков инерциальной информации подвижного объекта на основе информации блока инерциальной информации подвижного носителя указанное программное обеспечение инсталлируют в бортовой компьютер подвижного объекта и реализуют эту процедуру до момента времени старта подвижного объекта с подвижного носителя. Задача калибровки неидеальных инерциальных датчиков является актуальной в случае, когда в течение интервала времени навигации подвижного объекта необходимо повышать точность инерциальной информации путем алгоритмической компенсации погрешностей этих датчиков при условии задания их математических моделей погрешностей. В этом случае перед выполнением основной задачи навигации объекта определяют коэффициенты моделей погрешностей неидеальных инерциальных датчиков бесплатформенной инерциальной навигационной системы подвижного объекта на основе информации с инерциальных датчиков более точной инерциальной навигационной системы подвижного носителя, полученные в условиях реального движения основания. Так как бесплатформенная инерциальная навигационная система подвижного объекта и более точная инерциальная навигационная система подвижного носителя располагаются в разных местах относительно движущихся носителя и объекта и их блоки инерциальной информации в общем случае по разному ориентированы на подвижном носителе и подвижном объекте, то задача калибровки датчиков бесплатформенной инерциальной навигационной системы подвижного объекта сводится к согласованию ее информации с информацией более точной бесплатформенной инерциальной навигационной системы подвижного носителя, а математическое описание для этой задачи включает систему алгебраических уравнений относительно определяемых коэффициентов моделей погрешностей датчиков. Результат решения задачи калибровки - это алгоритм для бортового компьютера определения коэффициентов моделей погрешностей датчиков бесплатформенной инерциальной навигационной системы подвижного объекта на основе информации более точной инерциальной навигационной системы подвижного носителя.
Должно быть разработано программное обеспечение для процедуры диагностики информационных нарушений инерциальных датчиков обоих блоков инерциальной информации подвижного объекта и указанное программное обеспечение должно быть инсталлировано в бортовой компьютер подвижного объекта для реализации процедуры диагностики в течение времени движения подвижного объекта после его старта с подвижного носителя. Задача диагностики неидеальных инерциальных датчиков является актуальной в случае, когда в течение интервала времени навигации подвижного объекта возникают информационные нарушения в работе того или иного датчика бесплатформенной инерциальной навигационной системы подвижного объекта. Датчик с недостоверной информацией необходимо своевременно распознать, отключить измеряемую им информацию от системы и переключить на получение необходимой информации с дублирующего нормально работающего датчика. Вводится критерий информационного нарушения датчика. Математическое описание для решения этой задачи выполнено с использованием нейросетевого подхода. Результат решения задачи - это имитационная модель алгоритма обнаружения информационных нарушений инерциальных датчиков обоих блоков инерциальной информации бесплатформенной инерциальной навигационной системы подвижного объекта.
Должно быть разработано программное обеспечение для процедуры оценивания переменных навигационной информации, генерируемой бесплатформенной инерциальной навигационной системой подвижного объекта, оно должно быть инсталлировано в бортовой компьютер подвижного объекта для реализации процедуры оценивания во время движения подвижного объекта после его старта с подвижного носителя. Для решения задачи оценивания вводится критерий точности бесплатформенной инерциальной навигационной системы подвижного объекта и задается информация о структуре погрешностей инерциальных датчиков. Критерий точности бесплатформенной инерциальной навигационной системы подвижного объекта минимизируется и для выполнения математических описаний использован стохастический подход на основе и аппарата линейной оптимальной фильтрации. Результаты решения задачи - это количественные эффекты повышения точности бесплатформенной инерциальной навигационной системы подвижного объекта и алгоритмы обработки информации неидеальных датчиков, минимизирующие этот критерий точности.
Должно быть разработано программное обеспечение для процедуры определения массогеометрических характеристик подвижного объекта и оно должно быть инсталлировано в бортовой компьютер подвижного объекта для реализации процедуры определения массогеометрических характеристик во время движения подвижного объекта. Реальный подвижный объект в общем случае имеет переменные во времени массогеометрические характеристики: массу, три проекции радиуса-вектора центра масс, три осевых и три центробежных момента инерции в связанной с подвижным объектом системе координат. Качественное управление движением подвижного объекта зависит от величин указанных массогеометрических характеристик. Кроме того, знание текущего положения центра масс на объекте, позволит учесть составляющие погрешности измерения инерциальными чувствительными элементами, обусловленные именно движением центра масс по объекту, если его не учитывать. Поэтому актуальной является задача определения переменных во времени массогеометрических характеристик подвижного объекта в течение времени его движения. При условии наличия информации об моментно-силовых характеристиках подвижного объекта задача определения его массогеометрических характеристик имеет решение. Выполнение математического описания для ее решения базируется на уравнениях динамики подвижного объекта, переписанных в виде систем дифференциальных уравнений относительно переменных его массогеометрических характеристик, в правые части которых входят заданные моментно-силовые характеристик и кинематические характеристики подвижного объекта, получаемые от бесплатформенной инерциальной навигационной системой подвижного объекта. Набор указанных уравнений с присоединением уравнений функционирования бесплатформенной инерциальной навигационной системой подвижного объекта и их решения с учетом некоторых особенностей обеспечивают решения рассматриваемой задачи. Следует отметить, что решение задачи по определению массогеометрических характеристик подвижного объекта требует дополнительных вычислительных ресурсов, которые для современных бортовых компьютеров являются реальными. Другими словами, повышение качества управления объектом покупается ужесточением требований к бортовому компьютеру. Если такие требования реальны и могут быть еще жестче, то при априорно заданных программно-меняющихся массогеометрических характеристиках подвижного объекта для решения рассматриваемой задачи может быть использован математический аппарат теории линейной оптимальной фильтрации для оценивания переменных массогеометрических характеристик с целью повышения точности их определения.
При возможности возникновения аварийной ситуации с бесплатформенной инерциальной навигационной системой подвижного объекта, например, при частичной или полной потери ее информации, при наличии на подвижном объекте устройств связи со спутниковой навигационной системой или устройств получения информации с астронавигационной системы, или от радионавигационной системы при возможности их применения на подвижном объекте, должно быть разработано программное обеспечение для процедуры коррекции бесплатформенной инерциальной навигационной системы подвижного объекта на основе информации, получаемой от указанных выше навигационных систем, это программное обеспечение должно быть инсталлировано в бортовой компьютер подвижного объекта для реализации процедуры коррекции в течение интервала времени движения подвижного объекта. Задача коррекции бесплатформенной инерциальной навигационной системой подвижного объекта актуальна и в случае, если в течение интервала времени ее автономного функционирования накопленные погрешности навигационной информации в смысле принятого критерия точности превышают допустимые значения или, как это было указано выше, имеет место потеря информации с автономных средств навигации. В этом случае используют все доступные средства для доставки в заданные моменты времени в бортовой компьютер подвижного объекта или более точной навигационной информации или теряемой информации. Для математического описания функционирования бесплатформенной инерциальной навигационной системой подвижного объекта с коррекцией от спутниковой навигационной системы или астронавигационной системы используется аппарат оценивания переменных навигационной информации на основе методов линейной оптимальной фильтрации. Синтез функционирования корректируемой бесплатформенной инерциальной навигационной системой подвижного объекта заключается в разработке имитационной модели алгоритма корректируемого функционирования и определения требований к объему памяти и быстродействию бортового компьютера подвижного объекта, которые будут более жесткими по сравнению с аналогичными требованиями к бортовому компьютеру бесплатформенной инерциальной навигационной системы подвижного объекта при ее функционировании в автономном режиме. Точностный синтез корректируемой бесплатформенной инерциальной навигационной системы подвижного объекта заключается в определении требований и к погрешностям первого блока инерциальной информации подвижного объекта и к погрешностям информации, получаемой от спутниковой навигационной системы или астронавигационной системы.
Осуществление изобретения
На фиг. 1 показаны движущиеся относительно Земли подвижный носитель 1 и подвижный объект 2, с которыми связаны соответственно системы координат OJJ1J2J3, ΟΥΥ1Υ2Υ3. С вращающейся относительно инерциальной системы координат O1I1I2I3 Землей связана система координат OZZ1Z2Z3, где ΟI - центр Земли, ΟZ - точка старта подвижного носителя 1 и подвижного объекта 2. На подвижном носителе 1 установлена инерциальная навигационная система 3, на подвижном объекте 2 установлена бесплатформенная инерциальная навигационная система 4.
На фиг. 2 показана структура инерциальной навигационной системы 3 для выдачи навигационной информации управления подвижным носителем 1, представляющая собой блок инерциальной информации 5 и бортовой компьютер 8. Блок инерциальной информации 5 состоит из инерциального триэдра 6 минимальной конфигурации и локального компьютера 7. Каждый из датчиков инерциального триэдра выполнен по беспроводной технологии передачи данных так, что выходные сигналы датчиков передаются в локальный компьютер 7, в котором сигналы датчиков, то есть компоненты первичной информации, преобразуются в проекции вектора кажущегося ускорения точки Отдвижного носителя 1 и в проекции вектора абсолютной угловой скорости подвижного носителя 1 на оси системы координат OJJ1J2J3, то есть в компоненты инерциальной информации, передаваемые из локального компьютера 7 в бортовой компьютер 8 по беспроводной технологии передачи данных.
На фиг. 3 показана общая структура бесплатформенной инерциальной навигационная системы 4 для выдачи навигационной информации управления подвижным объектом 2, представляющая собой блок инерциальной информации 9, блок инерциальной информации 10 и бортовой компьютер 11, которые обмениваются данными по беспроводной технологии, блок инерциальной информации 9 работает только на передачу информации, предоставляя информацию для блока инерциальной информации 10 и бортового компьютера 11, а блок инерциальной информации 10 работает на прием информации из бортового компьютера 11 и на передачу информации в бортовой компьютер 11.
На фиг. 4 показана структура блока инерциальной информации 9, который состоит из инерциального триэдра 12 расширенной конфигурации и локального компьютера 13. Каждый из датчиков инерциального триэдра 12 выполнен по беспроводной технологии передачи данных и снабжен встроенным компьютером так, что выходные сигналы датчиков передаются в локальный компьютер 13, в котором сигналы датчиков, то есть компоненты первичной информации, преобразуются в проекции вектора кажущегося ускорения точки ОY подвижного объекта 2 и в проекции вектора абсолютной угловой скорости подвижного объекта 2 на оси системы координат ОYY1Y2Y3, то есть в компоненты инерциальной информации, передаваемые из локального компьютера 13 в бортовой компьютер 11 бесплатформенной инерциальной навигационной системы 4 по беспроводной технологии передачи данных. Расширенная конфигурация инерциального триэдра 12 предполагает наличие ресурсов по датчикам и по их размещению так, что возможно каждую тройку указанных датчиков N кратно увеличить для получения первичной информации с избыточностью, равной N, с целью повышения надежности и точности инерциальной информации и соответственно, повышения надежности и точности навигационной информации.
На фиг. 5 показана структура блока инерциальной информации 10, реализующего структурно-алгоритмическое повышение точности бесплатформенной инерциальной навигационной системы 4. Для реализации сферического движения инерциального триэдра 14 относительно подвижного объекта 2 использован трехстепенный карданов подвес, на внутренней оси которого жестко закреплен этот инерциальный триэдр 14 средней конфигурации. На внутренней оси карданова подвеса установлены двигатель 15 и тахометр 16, на промежуточной оси карданова подвеса установлены управляемый двигатель разворота 17 и датчик угла 18, на наружной оси карданова подвеса установлены управляемый двигатель разворота 19 и датчик угла 20. Каждый из датчиков инерциального триэдра 14 выполнен по беспроводной технологии передачи данных и снабжен встроенным компьютером. Двигатель 15, тахометр 16, управляемы двигатели разворотов 17, 19 и датчики угла 18, 20 также выполнены по беспроводным технологиям передачи данных. Информация с датчиков инерциального триэдра 14, с тахометра 16, датчиков угла 18, 20 подается на вход локального компьютера 21, с выхода которого подается информация на вход двигателя 15 и на входы датчиков момента 17, 19. На вход локального компьютера 21 подается также информация от локального компьютера 9, а с выхода локального компьютера 21 информация передается в бортовой компьютер 11.
Устройство работает следующим образом
До начала движения носителя, то есть до момента времени t* (фиг. 6), реализуется процедура начальной выставки инерциальной навигационной системы подвижного носителя и контрольная процедура выставки бесплатформенной инерциальной навигационной системы подвижного объекта, которая заключается в определении параметров ориентации подвижного носителя и подвижного объекта относительно опорных для носителя и объекта систем координат, связанных с Землей. При этой процедуре акселерометры измеряют проекции вектора кажущегося ускорения начала, связанной с каждым из объектов, системы координат на оси этих же систем координат, а датчики угловой скорости измеряют проекции на оси этих же систем координат вектора абсолютной угловой скорости Земли. Для решения указанных задач начальной выставки выполняется математическое описание, которое включает систему алгебраических уравнений относительно параметров ориентации блока инерциальной информации относительно Земли, в правых частях которых - измеряемые компоненты вектора кажущегося ускорения и вектора абсолютной угловой скорости. Реально точность начальной выставки выше у инерциальной навигационной системы 3, поэтому полученная информация передается с инерциальной навигационной системы 3 на бесплатформенную инерциальную навигационную систему 4 с учетом установки подвижного объекта (объектов) на носителе. Для решения задач начальной выставки необходимо в бортовые компьютеры подвижного носителя и подвижного объекта инсталлировать программное обеспечение, условно обозначенное на фиг. 6 позицией 22, разработанное, например, на основе математических описаний и алгоритмов [12,…,15].
Кроме этого, для работы инерциального навигационного комплекса на стадиях движения объектов, в бортовой компьютер 11 бесплатформенной инерциальной навигационной системы 4 необходимо инсталлировать:
1) программное обеспечение, условно обозначенное на фиг. 6 позицией 23, разработанное, например, на основе математических описаний и алгоритмов [16,…,20] для процедуры калибровки инерциальных датчиков бесплатформенной инерциальной навигационной системы 4 на основе информации от инерциальных датчиков инерциальной навигационной системы 3;
2) программное обеспечение, условно обозначенное на фиг. 6 позицией 24, разработанное, например, на основе математических описаний и алгоритмов [21,…,26] для процедуры диагностики инерциальных датчиков обоих блоков инерциальной информации бесплатформенной инерциальной навигационной системы 4;
3) программное обеспечение, условно обозначенное на фиг. 6 позицией 25, разработанное, например, на основе математических описаний и алгоритмов [27,…,31] для процедуры оценивания переменных инерциальной информации обоих блоков инерциальной информации бесплатформенной инерциальной навигационной системы 4 на основе априорной информации о динамических характеристиках объекта и инерциальной информации, заданных со случайными погрешностями; математическое описание для решения этой задачи выполнено на основе теории линейной оптимальной фильтрации;
4) программное обеспечение, условно обозначенное на фиг. 6 позицией 26, разработанное, например, на основе математических описаний и алгоритмов [32,…,58] для процедуры анализа точности обоих блоков инерциальной информации бесплатформенной инерциальной навигационной системы 4. Для решения этой задачи вводится критерий точности бесплатформенной инерциальной навигационной системы 4, задается информация о структуре погрешностей инерциальных датчиков обоих блоков инерциальной информации бесплатформенной инерциальной навигационной системы 4, выполняется математическое описание в рамках стохастического подхода, составляются алгоритмы и разрабатываются программы с целью определения погрешностей переменных навигационной информации с последующим определением величин критериев точности этой информации, получаемой на основе инерциальной информации указанных боков бесплатформенной инерциальной навигационной системы 4 и сравнением полученных величин друг с другом, после чего используется информация с того блока бесплатформенной инерциальной навигационной системы 4, с которого поступает более точная инерциальная информация;
5) программное обеспечение, условно обозначенное на фиг. 6 позицией 27, разработанное, например, на основе математических описаний и алгоритмов [59,…,78] для процедуры структурно-алгоритмического повышения точности путем вращения инерциального триэдра 14 (фиг. 5) и его оптимальной ориентации относительно объекта 2. Для решения этих задач автономного повышения точности бесплатформенной инерциальной навигационной системы 4 вводится критерий точности для подвижного объекта 2 и задается информация о структуре погрешностей инерциальных датчиков, включая составляющие, зависящие от изменения положения центра масс на подвижном объекте и его движения. Критерий точности бесплатформенной инерциальной навигационной системы 4 минимизируется структурно-алгоритмическими способами: принудительным вращением триэдра 14 инерциальных датчиков относительно подвижного объекта 2 и оптимальной ориентацией этого триэдра относительно подвижного объекта 2. Для выполнения математических описаний использован стохастический подход, аппараты минимизации функции нескольких переменных и оптимального управления;
6) программное обеспечение, условно обозначенное на фиг. 6 позицией 28, разработанное, например, на основе математических описаний и алгоритмов [79,…,91] для процедуры определения переменных массогеометрических характеристик подвижного объекта 2 (массы, трех проекций радиуса-вектора центра масс и его движения по объекту, трех осевых и трех центробежных моментов инерции в связанной с подвижным объектом системе координат) по информации бесплатформенной инерциальной навигационной системы 4, которая генерирует информацию о кинематических характеристиках подвижного объекта 2 для системы управления его движением;
7) программное обеспечение, условно обозначенное на фиг. 6 позицией 29, разработанное, например, на основе математических описаний и алгоритмов [92,…,104] для процедуры коррекции бесплатформенной инерциальной навигационной системы 4.
Далее приведено описание работы устройства на стадии совместного движения носителя и объекта и на четырех стадиях движения подвижного объекта после его старта с подвижного носителя, при этом на фиг. 7 - фиг. 11 использованы номера указанных выше позиций для обозначения соответствующих программных обеспечений, которые являются работающими в бортовом компьютере бесплатформенной инерциальной навигационной системы 4 на той или иной стадии.
На стадии I (фиг. 7) от момента времени t0 - момента принятия решения о старте подвижного объекта с носителя до момента времени t1подвижный носитель и подвижный объект движутся вместе, и на основе информации инерциальной навигационной системы 3 подвижного носителя реализуется процедура калибровки 23 инерциальных датчиков бесплатформенной инерциальной навигационной системы 4 подвижного объекта, а также реализуются процедуры ее диагностики 24 и оценивания 25.
На стадии II (фиг. 8) движения подвижного объекта 2 от момента времени t1 его старта с подвижного носителя 1 до момента времени t2 окончания его почти поступательного движения работают оба инерциальных триэдра бесплатформенной инерциальной навигационной системы 4 на генерирование инерциальной информации, при этом инерциальный триэдр 14 приводится во вращение с угловой скоростью, величина которой определяется из условия минимизации погрешностей навигационной информации, вычисленной на основе инерциальной информации инерциального триэдра 12, реализуются процедуры диагностики 24, оценивания 25 и функционирования бесплатформенной инерциальной навигационной системы 4 с вращающимся инерциальным триэдром 14, при котором осуществляется процедура анализа точности 26 обоих инерциальных триэдров с учетом процедуры повышения точности 27 путем вращения инерциального триэдра 14.
На стадии III (фиг. 9) движения подвижного объекта 2 от момента времени t2 окончания его почти поступательного движения до момента времени t3 начала подготовки к маневру работают оба инерциальных триэдра бесплатформенной инерциальной навигационной системы 4 на генерирование инерциальной информации, при этом вращение инерциального триэдра 14 остановлено, реализуются процедуры диагностики 24, оценивания 25 и функционирования бесплатформенной инерциальной навигационной системы 4 при остановленном инерциальном триэдре 14 - это частный случай для процедуры анализа точности 26 и процедуры повышения точности 27.
На стадии IV (фиг. 10) движения подвижного объекта 2 от момента времени t3 начала подготовки к маневру до момента времени t4 окончания подготовки к маневру оба инерциальных триэдра бесплатформенной инерциальной навигационной системы 4 работают на генерирование инерциальной информации, при этом инерциальный триэдр 14 оптимально ориентируется относительно объекта на основе инерциальной информации неподвижного триэдра 12 из условия минимизации погрешностей навигационной информации, вычисленной на основе инерциальной информации подвижного триэдра 14, реализуются процедуры диагностики 24, оценивания 25 и функционирования бесплатформенной инерциальной навигационной системы 4 с процедурой анализа точности 26 и процедурой повышения точности 27 путем оптимальной ориентации подвижного триэдра.
На стадии V (фиг. 11) движения подвижного объекта 2 от момента времени t4 окончания подготовки к маневру до момента времени t5 окончания маневра оба инерциальных триэдра бесплатформенной инерциальной навигационной системы 4 работают на генерирование инерциальной информации, при этом инерциальный триэдр 14 остановлен, реализуются процедуры диагностики 24, оценивания 25 и функционирования бесплатформенной инерциальной навигационной системы 4 при остановленном инерциальном триэдре 14 - это частный случай для процедуры анализа точности 26 и процедуры повышения точности 27.
На стадии VI движения подвижного объекта 2 от момента времени t5 окончания маневра до момента времени окончания его движения оба инерциальных триэдра бесплатформенной инерциальной навигационной системы 4 работают на генерирование инерциальной информации, при этом инерциальный триэдр 14 приводится во вращение с угловой скоростью, величина которой определяется из условия минимизации погрешностей навигационной информации, вычисленной на основе инерциальной информации инерциального триэдра 12, реализуются процедуры диагностики 24, оценивания 25 и функционирования бесплатформенной инерциальной навигационной системы 4 с процедурой анализа точности 26 и процедурой повышения точности 27 путем вращения инерциального триэдра 14: этот вариант структуры бесплатформенной инерциальной навигационной системы 4 был представлен на фиг. 8, так как стадия VI движения подвижного объекта 2 аналогична стадии II движения этого объекта.
Следует отметить, что процедура анализа точности обоих блоков бесплатформенной инерциальной навигационной системы 4 на основе программного обеспечения 26 реализуется на всех стадиях движения объекта и в результате сравнения для управления движением подвижного объекта 2 используется информация с того блока бесплатформенной инерциальной навигационной системы 4, с которого поступает более точная инерциальная информация. Другими словами, в течение всего времени навигации подвижного объекта 2 осуществляется переключение с менее точного блока на более точный, то есть блоки адаптируют по точности к движению объекта.
При необходимости процедура определения массогеометрических характеристик 28 подвижного объекта 2 может быть реализована на всех шести стадиях движения этого объекта. Процедура коррекции 29 бесплатформенной инерциальной навигационной системы 4 нарушает желаемый автономный режим навигации подвижного объекта 2 и поэтому может быть подключена в крайнем случае только по аварийному сигналу о сбое в работе бесплатформенной инерциальной навигационной системы 4, но, тем не менее, при необходимости процедура коррекции 29 бесплатформенной инерциальной навигационной системы 4 может быть реализована на всех шести стадиях движения подвижного объекта 2.
Следует также отметить, что все указанные выше программные обеспечения работают на повышение надежности и точности навигации объекта 2, а следовательно, и на повышение точности системы управления его движением, что актуально для высокоскоростного и маневренного объекта, а поэтому и эти программные обеспечения являются актуальными и существенными в предлагаемом инерциальном навигационном комплексе.
Инерциальные датчики бесплатформенной инерциальной навигационной системы 4 должны удовлетворять сравнительно жестким требованиям по добротности, объемно-массовым характеристикам и работоспособности в условиях больших линейных и угловых перегрузок. Поэтому в качестве однокомпонентных датчиков угловых скоростей целесообразно использовать последние их разработки на основе кориолисовых вибрационных гироскопов [105], в качестве датчиков угловых ускорений - те же разработки с алгоритмическим определением углового ускорения, а в качестве однокомпонентных акселерометров целесообразно использовать последние их разработки на основе кварцевых технологий [106]. При этом указанные датчики должны быть выполнены по беспроводным технологиям передачи данных [107] и оснащены встроенными компьютерами.
Источники информации
1. Навигационный комплекс. Патент №2373498/ ОАО Конструкторское бюро «Луч», авторы: Кизимов А.Т., Фролова Л.Е., Алексеев СМ., Фролов В.Ф. - МПК 6 G01C 23/00.
2. Способ построения инерциальной навигационной системы. А.с. №155519 / Челяб. политех, ин-т, автор Щипицын А.Г. - Заявлено 20.04.79 №2276932 МКИ 3 G01C 19/00. Зарегист.5.02.81.
3. Способ построения инерциальной навигационной системы. А.с. №183269 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С. - Заявлено 16.03.82 №3042080 МКИ 3 G01C 19/00. Зарегист. 7.01.83.
4. Способ построения инерциальной навигационной системы. А.с. №201020 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С., Губницкий А.Ф. - Заявлено 4.05.83 №3065109 МКИ 3 G01C 19/00. Зарегист. 27.03.84.
5. Способ построения инерциальной навигационной системы. А.с. №241291 / Челяб. политех, ин-т, авторы: Щипицын А.Г., Хмелевский А.С., Губницкий А.Ф., Слепова С.В. - Заявлено 9.10.85 №3125843 МКИ 3 G01C 19/00. Зарегист. 1.08.86.
6. Способ выставки инерциальных чувствительных элементов А.с. №601995 / Челяб. политех, ин-т, автор Щипицын А.Г. - Заявлено 12.02.76 №2324428 МКИ 2 G01C 23/00. Зарегист. 14.12.77.
7. Способ выставки акселерометров А.с. №753243 / Челяб. политех, ин-т, автор Щипицын А.Г. - Заявлено 2.11.78 №2680471 МКИ 2 G01C 23/00. Зарегист. 7.04.80.
8. Инерциальная навигационная система. Пат. РФ №778455 от 13.08.93 / Челяб. гос. техн. ун-т, автор Щипицын А.Г. Заявлено 17.01.79 №2714664 МКИ 3 G01C 23/00. Зарегист. 14.07.80.
9. Инерциальная навигационная система. Патент на изобретение №2257547 от 27.07.2005 по заявке №2004105292 от 24.02.2004 / Южно-Уральский гос. ун-т, авторы Шафранюк А.В., Щипицын А.Г. - Заявлено 24.02.2004 №2004105292 МПК 7 G01C 23/00. Зарегистр. 27.07.2005.
10. Инерциальная навигационная системы для объектов с плоскими траекториями центров масс А.с. №627699 / Челяб. политех., ин-т, автор Щипицын А.Г. - Заявлено 20.04.77 №2477907 МКИ2 G01C 23/00. Зарегист. 14.06.78.
11. Устройство для выставки инерциальных датчиков. Патент РФ №1426192 от 12.08.93 / Челяб. гос. техническ. ун-т, автор Щипицын А.Г. Заявлено 24.03.86 №4042395 МКИ4 G01C 23/00. Зарегист. 22.05.88.
12. Щипицын А.Г. К задаче определения начальной ориентации объекта бесплатформенной инерциальной навигационной системой / А.Г. Щипицын, М.А. Щипицына, С.В. Слепова // XXV Российская школа по проблемам науки и технологий, посвященная 60-летию Победы. - Екатеринбург: УрО РАН, 2005. - С. 266-268.
13. Щипицына М.А. Математическая модель синтеза точности определения параметров начальной ориентации объекта бесплатформенной инерциальной навигационной системой // Сб. рефератов научно-исследовательских работ студентов по конкурсу грантов студентов, аспирантов и молодых ученых вузов Челябинской области:. - Челябинск: Изд-во ЮУрГУ, 2007. - С. 152-153.
14. Щипицына М.А., Устюгов М.Н. Математическая модель для задачи определения параметров начальной ориентации объекта бесплатформенной инерциальной навигационной системой // Труды XXVI Российской школы по проблемам науки и технологий. - Екатеринбург: УрО РАН, 2006. - С. 241-243.
15. Щипицына М.А., Устюгов М.Н. Математическая модель для задачи синтеза точности начальной выставки бесплатформенной инерциальной навигационной системы // Сб. научн. тр. «Информационные системы и устройства» - Челябинск: Изд-во ЮУрГУ, 2007. - С. 102-108.
16. Деева А.С., Щипицын А.Г. Калибровка акселерометра и гироскопа на неподвижном относительно Земли основании с использованием аппарата нейронных сетей. // Сб. научн. тр. «Информационные системы и устройства».- Челябинск: Изд-во ЮУрГУ, 2007. - С. 77-80.
17. Щипицын А.Г. Математическое и алгоритмическое обеспечение калибровки инерциальной навигационной системы на движущемся объекте. // материалы 60-й юбилейной научной конференции «Наука ЮУрГУ». Секции технических наук. Т2. - Челябинск: Изд-во ЮУрГУ,2008. - С. 137.
18. Щипицын А.Г. Математическое и алгоритмическое обеспечение процедуры калибровки инерциальных навигационных систем: учебное пособие. - Челябинск: Изд-во ЮУрГУ, 2008. - 163 с.
19. Щипицын, А.Г. Математическое описание для процедуры калибровки инерциальной навигационной системы // Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». - Вып. 5, №7(79). - Челябинск: Изд-во ЮУрГУ, 2007. - С. 52-61.
20. Щипицына М.А., Устюгов М.Н. Калибровка акселерометра бесплатформенной инерциальной навигационной системы //Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». - Вып. 4, №14(69). - Челябинск: Изд-во ЮУрГУ, 2006 - С. 140-143.
21. Деева А.С. Щипицын А.Г. Контроль и диагностика избыточной инерциальной навигационной системы // Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». - Вып. 5, №7(79). - Челябинск: Изд-во ЮУрГУ, 2007. - С. 12-17.
22. Деева А.С., Щипицын А.Г. Контроль и диагностика информационных нарушений инерциальных навигационных систем с использованием банка вероятностных нейронных сетей // Свидетельство об отраслевой регистрации разработки № ОФАП 10952 от 01.07 2008.
23. Деева А.С., Щипицын А.Г. Математическое и алгоритмическое обеспечение диагностики инерциальных навигационных систем на основе нейросетевого подхода. // Материалы 60-й юбилейной научной конференции «Наука ЮУрГУ». Секции технических наук. Т.2 - Челябинск: Изд-во ЮУрГУ, 2008. - С. 22-24.
24. Деева А.С., Щипицын А.Г. Методы контроля и диагностики информационных нарушений инерциальных навигационных систем // Вестник ЮУрГУ, серия КТУР, выпуск 11, №2(178), 2010. - Челябинск: Издат. центр ЮУрГУ, 2010. - С. 21-25.
25. Деева А.С., Щипицын А.Г. Результаты функционирования имитационной модели диагностики инерциальных навигационных систем на основе нейросетевого подхода // В кн.: материалы 61-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т.2. - Челябинск: Издат. центр ЮУрГУ, 2009. - С. 73-78.
26. Щипицын А.Г., Деева А.С.Некоторые результаты исследования задачи контроля и диагностики информационных нарушений инерциальных навигационных систем // Сб. научн. тр. «Системы управления и информационные технологии». - Челябинск: Изд. центр ЮУрГУ, 2009. - С. 213-218.
27. Щипицын А.Г. Обработка информации в инерциальных навигационных системах: монография. - Челябинск: ЧГТУ, 1995. - 339 с.
28. Щипицын А.Г. Оценка эффекта повышения точности инерциальной информации оптимальной фильтрацией сигналов датчиков // Сб. научн. тр. ЧГТУ «Системы автоматики и их элементы». - Челябинск: ЧГТУ, 1991. - С. 67-70.
29. Щипицын А.Г. Программное обеспечение оценивания состояния динамического процесса с эффективными ограничениями на его параметры // Свидетельство о регистрации электронного ресурса №21249 от 15.10.2015.
30. Fokin, L., Shchipitsyn, A. Innovation-based adaptive Kalman filter derivation // IEEE International Siberian Conference on Control and Communications (SIBCON-2009) Proceedings, Mar. 27-28, 2009. - IEEE, 2009. - P. 318-323.
31. Щипицын А.Г. Задача оценивания состояния динамического процесса // // Международный журнал экспериментального образования №12 (часть 5), 2015. - С. 677-682.
32. Вельский Л.Н. Система поддержки принятия решений при разработке бесплатформенных инерциальных навигационных систем для объектов одного класса. / Вельский Л.Н., Дерюгин С.Ф., Шалимов Л.Н., Щипицын А.Г., Фокин Л.А. // Материалы XXIV конференции памяти Н.Н. Острякова. - Гироскопия и навигация, 2004, №4. - С. 93.
33. Фокин Л.А., Щипицын А.Г. К задаче разработки удаленной базы данных инерциальных датчиков // Сб. научн. тр. «Системы управления и информационные технологии». - Челябинск: Изд. центр ЮУрГУ, 2009. - С. 190-194.
34. Фокин Л.А., Щипицын А.Г. Моделирование решения навигационной задачи бесплатформенной инерциальной навигационной системой // Сб. научн. тр. II научно-технической конференции молодых специалистов НПОА. Ракетно-космическая техника. Системы управления ракетных комплексов. Вып. 1. Ч. 2. - Екатеринбург, 8-9 апреля 2004 г. - Екатеринбург, 2004. - С. 63-69.
35. Фокин Л.А., Щипицын А.Г. О распространенных постановках и способах решения задач навигации БИНС // Сб. научн. тр. «Интеллектика, логистика, системология»: - Челябинск: Изд. ЧНЦ РАЕН, РУО МАИ, ЧРО МАНПО, ЧРО МААНОИ. Вып. 16, 2006. - С. 41-50.
36. Фокин Л.А., Щипицын А.Г., Разнополое К.О. Имитационное моделирование функционирования бесплатформенной инерциальной навигационной системы // Сб. научн. тр. «Интеллектика, логистика, системология». Вып 12. - Челябинск: Издание ЧНЦ РАЕН, РУО МАИ, ЧРО МАНПО, ЧРО МААНОИ, 2003. - С. 96-103.
37. Щипицын А.Г. Автономные бесплатформенные инерциальные навигационные системы: Анализ функционирования и точности // А.Г. Щипицын, Л.Н. Шалимов, Л.А. Фокин, М.А. Шахина. - Челябинск: Издательский центр ЮУрГУ, 2010. - 228 с.
38. Шафранюк А.В., Щипицын А.Г. Построение и классификация сканирующих инерциальных навигационных систем. // Сб. научн. тр. «Информационные, измерительные, управляющие и радиоэлектронные системы и устройства - Челябинск: Изд-во ЮУрГУ, 2005. - С. 125-137.
39. Щипицын А.Г, Баранова И.А. Задачи разработки инерциальной навигационной системы со сканирующими датчиками // В кн. «Труды Международного Форума по проблемам науки, техники и образования». Том 2. - М.: Академия наук о Земле, 2001. - С. 123- 125.
40. Щипицын А.Г. Бесплатформенные инерциальные навигационные системы: учебное пособие. - Челябинск: ЧГТУ, 1993. - 108 с.
41. Щипицын А.Г. Задачи разработки математического и алгоритмического обеспечения синтеза бесплатформенных инерциальных навигационных систем. // Труды XXVIII Российской школы «Наука и технологии». Том 2. Специальный выпуск, посвященный 65-летию Южно-Уральского государственного университета. - М.: РАН, 2008. - С. 51-54.
42. Щипицын А.Г. Задачи разработки математического и алгоритмического обеспечения синтеза бесплатформенных инерциальных навигационных систем для объекта ракетно-космического назначения / Щипицын А.Г., Шалимов Л.Н., Фокин Л.А., Деева А.С., Устюгов М.Н., Шахина М.А. // Рефераты докладов XXVI конференция памяти выдающегося конструктора гироскопических приборов Н.Н. Острякова. - С.-Петербург: ЦНИИ Электроприбор, 2008. - С. 23.
43. Щипицын А.Г. Инерциальные навигационные системы. Анализ функционирования и точности: учебное пособие. - Челябинск: ЮУрГУ, 1998. - 116 с.
44. Андрулов А.И., Щипицын А.Г. Подход к разработке математической модели прогибов корабля для задачи алгоритмического повышения точности навигационной системы автоматической посадки самолета // Сб. научн. тр. ЮУрГУ «Информационно-измерительные и управляющие системы и устройства» - Челябинск: ЮУрГУ, 2000. - С. 72-83.
45. Щипицын А.Г., Верясов А.В. Анализ инерциальной навигационной системы со сканирующим датчиком // Свидетельство РФ об официальной регистрации программы для ЭВМ №960492 от 19.11.96.
46. Щипицын А.Г., Губницкий А.Ф., Денисов Ю.П. Бортовой вычислитель для БИНС // Сб. научн. трудов ХАИ "Автоматизация проектирования цифровых систем управления ЛА". - Харьков: ХАИ, 1987. - С. 67-72.
47. Щипицын А.Г., Хаютин A.M., Хаютин М.И. Система обработки информации динамического стенда: алгоритмы работы и математические модели: учебное пособие. -Челябинск: Изд-во ЮУрГУ, 2008. - 104 с.
48. Щипицын А.Г., Шалимов Л.Н., Фокин Л.А. Математическое и алгоритмическое обеспечение синтеза автономных инерциальных навигационных систем: учебное пособие. - Челябинск: Изд-во ЮУрГУ, 2008. - 149 с.
49. Щипицын А.Г., Шалимов Л.Н., Фокин Л.А. Математическое и алгоритмическое обеспечение анализа бесплатформенных инерциальных навигационных систем для объектов воздушного старта. // Материалы 60-й юбилейной научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Изд-во ЮУрГУ, 2008. - С. 135-136.
50. Щипицына М.А., Слепова С.В. К задаче разработки алгоритма функционирования бесплатформенной инерциальной навигационной системы с учетом информации о движении объекта // Сб. материалов 4-й международной научно-практической конференции «Составляющие научно-технического прогресса» 23-24 апреля 2008 г. - Тамбов: Издательство ТАМБОВПРИНТ, 2008. - С. 138-142.
51. Шалимов Л.Н., Фокин Л.Α., Щипицын А.Г. Прикладной программный продукт анализа и синтеза точности бесплатформенных инерциальных навигационных систем // Авиакосмическое приборостроение, 2005, №12. - С. 15-21.
52. Шалимов Л.Н., Щипицын А.Г., Фокин Л.А. Имитационный комплекс анализа и синтеза точности бесплатформенных инерциальных навигационных систем // Вестник Южно-Уральского государственного университета. Серия «Компьютерные технологии, управление, радиоэлектроника». Выпуск 3, №9 (38). 2004. - С. 89-93.
53. Шалимов Л.Н., Щипицын А.Г., Фокин Л.А. Методика автоматизированного синтеза точности БИНС при случайных погрешностях измерительной и априорной информации // Труды XXVI Российской школы по проблемам науки и технологий. - Миасс, 2006. - С. 53.
54. Шахина М.А., Шалимов Л.Н. Математическое описание анализа точности автономной бесплатформенной инерциальной навигационной системы // материалы 61-й научной конференции «Наука ЮУрГУ». Секции техн. наук. Т. 2. - Челябинск: Издат. центр ЮУрГУ, 2009. - С. 57-59.
55. Щипицын А.Г., Пляшник В.А. Пакет прикладных программ "Анализ БИНС" // Свидетельство РФ об официальной регистрации программы для ЭВМ №950325 от 19.09.95.
56. Щипицын А.Г., Пляшник В.А. Программа для численного моделирования анализа бесплатформенных инерциальных навигационных систем: учебное пособие для лабораторных занятий на ПЭВМ.- Челябинск, ЧГТУ, 1995. - 83 с.
57. Щипицына М.А., Устюгов М.Н. Некоторые рекомендации по результатам моделирования задачи идентификации погрешностей инерциальной навигационной системы // Сборник 1-й международной научно-практическая конференция «Интеграция науки и производства» 19-20 мая 2008 г. - Тамбов: Издательство ТАМБОВПРИНТ, 2008. - С. 106-107.
58. Щипицына М.А., Устюгов М.Н. Разработка программного обеспечения и результаты численного моделирования задачи идентификации погрешностей инерциальных навигационных систем // Материалы 60-й юбилейной научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Изд-во ЮУрГУ, 2008. - С. 133-135.
59. Деева А.С., Щипицын А.Г. Повышение точности инерциальной информации оптимальной выставкой датчиков в БИНС // Материалы XXIV конференции памяти Н.Н. Острякова. - Гироскопия и навигация, 2004, №4. - С. 92.
60. Егоров К.В., Щипицын А.Г. Об одном автономном способе повышения точности инерциальных навигационных систем // В сб. научн. тр. "Приборы и устройства САУ" №6. - М.: НТО НИИП, 1977. - С. 13-18.
61. Фокин Л.Α., Щипицын А.Г. Бесплатформенные ИНС для высокоточной околоземной навигации и спутниковой геодезии: анализ функционирования и погрешностей // Известия РАН. Теория и системы управления. - 2008, №3. - С. 133-145.
62. Фокин Л.Α., Щипицын А.Г. Об одном случае аналитической интегрируемости нестационарного матричного обыкновенного дифференциального уравнения // Дифференциальные уравнения. - 2008, Т. 44, №9. - С. 1290-1292.
63. Щипицын А.Г. К задаче анализа эффекта повышения точности информационного канала инерциальной навигационной системы // Материалы 61-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Издат. центр ЮУрГУ, 2009. - С. 60-63.
64. Щипицын А.Г. К задаче повышения точности воспроизведения базовой системы отсчета на подвижном объекте методом оптимизации ориентации измерительного трехгранника // Сб. научн. тр. ХАИ "Системы управления ЛА" №5. - Харьков: ХАИ, 1979. - С. 25-31.
65. Щипицын А.Г. К задаче повышения точности инерциальной навигационной системы оптимальной ориентацией акселерометров // Сб. научн. тр. МАИ, вып. 504. - М.: МАИ, 1979. - С. 35-48.
66. Щипицын А.Г. К задаче точностного синтеза инерциальной навигационной системы // Сб. научн. тр. ЧПИ. - Челябинск: ЧПИ, 1985. - С. 102-105.
67. Щипицын А.Г. Математическая модель для задачи повышения точности определения проекции вектора в инерциальной навигационной системе со сканирующим датчиком // Сб. научн. тр. ЮУрГУ «Информационно-измерительные и управляющие системы и устройства. - Челябинск: ЮУрГУ, 2000. - С. 83-89.
68. Щипицын А.Г. Об использовании информации о погрешностях датчиков для повышения точности инерциальной навигационной системы //Сб. научн. тр. ТПИ "Влияние вибраций, линейных ускорений и вращения основания на поведение гироскопических устройств". - Томск: ТПИ, 1981. - С. 81-84.
69. Щипицын А.Г. Об одном автономном методе повышения точности бесплатформенной инерциальной навигационной системы. // сб. научн. тр. школы "Теоретические проблемы построения БИНС". - М.: ИПМ, 1978. - С. 58-65.
70. Щипицын А.Г. Об одном методе автономного повышения точности инерциальной навигационной системы // Сб. научн. тр. ППИ "Навигационные приборы и системы управления". - Пермь: ППИ, 1981. - С. 47-52.
71. Щипицын А.Г. Оптимизация закона принудительного вращения измерительных осей гироинтеграторов в инерциальной навигационной системе // Сб. научн. тр. ЧПИ №189. - Челябинск: ЧПИ, 1976. - С. 20-30.
72. Щипицын А.Г. Павлов В.В. Математическая модель для задачи повышения точности блока инерциальной информации алгоритмической компенсацией сигналов датчиков // Сб. научн. трудов ХАИ "Проектирование цифровых систем управления ЛА". - Харьков: ХАИ, 1991. - С. 85-90.
73. Щипицын А.Г. Подходы к решению проблем структурно-алгоритмического повышения точности бесплатформенной инерциальной навигационной системы // Труды XXIII Российской школы «Наука и технологии». Специальный выпуск, посвященный 60-летию Южно-Уральского государственного университета. - М.: УрО РАН, ВАК РФ, Межрегион. Совет по науке и технологиям, 2003. - С. 479-488.
74. Щипицын А.Г. Способ минимизации погрешностей навигационной информации БИНС// Сб. ст. школы "Теоретические проблемы построения БИНС". - М.: ИПМ, 1974. - С. 49-50.
75. Щипицын А.Г. Теория расчета и проектирования электромеханических приборов и систем. Часть 2. Принципы построения и методы повышения точности приборов и систем: текст лекций. - 2-е изд. - Челябинск: ЮУрГУ, 1998. - 162 с.
76. Щипицын А.Г. Теория расчета и проектирования электромеханических приборов и систем. Часть 4. Схемы приборов и систем: текст лекций. - 2-е изд. - Челябинск: ЮУрГУ, 1998. - 92 с.
77. Щипицын А.Г., Губницкий А.Ф. Алгоритмы функционирования, точностный синтез и идентификация БИНС // Изв. вузов. Приборостроение. - 1990, №1. - С. 63-69.
78. Щипицын А.Г., Гуркин О.Г. Основы идентификации и оптимизации систем: учебное пособие. - Челябинск: ЮУрГУ, 2002. - 118 с.
79. Слепова C.B., Щипицын А.Г., Шахина М.А. Задача определения параметров геометрии масс тела на основе измеряемых характеристик его движения // Международный журнал экспериментального образования №12 (часть 3), 2015. - С. 442-445.
80. Шалимов Л.Н., Щипицын А.Г. Подход к построению математической модели движения объекта управления // Труды XXXIV Уральского семинара «Механика и процессы управления». Том 2 - Екатеринбург: УрО РАН, 2004. - С. 263-268.
81. Шалимов Л.Н., Щипицын А.Г., Щипицына М.А. Математическое описание функционирования бесплатформенной инерциальной навигационной системы для объекта ракетно-космического назначения // Сб. научн. тр. научно-технической конференции молодых специалистов НПОА «Ракетно-космическая техника. Системы управления ракетных комплексов». Серия XI. Часть 1 - Екатеринбург, НПОА, 2008. - С. 72-81.
82. Шахина М.А. Задача определения массогеометрических характеристик по информации бесплатформенной инерциальной навигационной системы // Материалы первой научной конференции аспирантов и докторантов «Научный поиск». Технические науки. - Челябинск: Издат. центр ЮУрГУ, 2009. - С. 227-231.
83. Шахина М.А., Устюгов М.Н. О возможности определения переменных массогеометрических характеристик объекта по информации бесплатформенной инерциальной навигационной системы // Материалы 61-й научной конференции «Наука ЮУрГУ». Секции техн. наук. Т. 2. - Челябинск: Издат. центр ЮУрГУ, 2009. - С. 53-56.
84. Шахина М.А., Устюгов М.Н. Приближение заданных таблично функций времени массогеометрических характеристик объекта одного класса // материалы 62-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т.2. - Челябинск: Издат. центр ЮУрГУ, 2010. - С. 232-236.
85. Шахина М.А., Щипицын А.Г. Имитационная модель эксперимента по определению моментов инерции вращающегося тела по информации датчиков угловой скорости // Материалы 62-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т.2. - Челябинск: Издат. центр ЮУрГУ, 2010. - С. 213-217.
86. Шахина М.А., Щипицын А.Г. Пакет программ для определения переменной массы движущегося тела на основе инерциальной информации // Свидетельство о регистрации электронного ресурса №16277 от 14.10.2010.
87. Шахина М.А., Щипицын А.Г. Пакет программ для определения переменного момента инерции движущегося тела на основе инерциальной информации // Свидетельство о регистрации электронного ресурса №16287 от 01.11.2010.
88. Щипицын А.Г. К определению переменной массы движущегося тела на основе инерциальной информации // В кн.: материалы 62-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Издат. центр ЮУрГУ, 2010. - С. 240-244.
89. Щипицын А.Г. Программа определения параметров геометрии масс тела на основе измеряемых характеристик его движения // Свидетельство о регистрации электронного ресурса №20874 от 15.05.2015.
90. Щипицын А.Г., Слепова C.B., Шахина М.А. Программа для ЭВМ: Приближение массогеометрических характеристик летательного аппарата функциями времени // Свидетельство о регистрации электронного ресурса №15952 от 19.07.2010.
91. Щипицын А.Г., Шалимов Л.Н., Щипицына М.А. К задаче повышения точности управления объектом ракетно-космического назначения // 7-я международная конференция «Авиация и космонавтика - 2008»: тезисы докладов. - М.: Изд-во МАИ-ПРИНТ, 2008. - С. 140.
92. Кондратов А.А., Кривоноженков В.А., Щипицын А.Г. О построении модели БИНС объекта одного класса с неинвариантными алгоритмами обработки информации // Вестник ЮУрГУ, серия КТУР, выпуск 7, №3(103), 2008. - Челябинск: Изд-во ЮУрГУ, 2008. - С. 12-15.
93. Кондратов Α.Α., Щипицын А.Г. Результаты моделирования в задачах синтеза функционирования и точности бесплатформенной инерциальной навигационной системы объекта одного класса // Материалы 62-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Издат. центр ЮУрГУ, 2010. - С. 221-226.
94. Фокин Л.А. Научно-технические, образовательные и HR-факторы эффективной разработки интегрированных навигационных систем / Фокин Л.А., Садов В.Б., Шахина М.А., Щербаков В.П. // Вестник ЮУрГУ. Сер. КТУР. 2011, №23, Вып.14. - Челябинск: Издат. Центр ЮУрГУ, 2011. - С. 26-29.
95. Фокин Л.А., Щипицын А.Г. Задачи разработки интегрированной инерциально-астро-спутниковой навигационной системы. // Материалы 60-й юбилейной научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Изд-во ЮУрГУ, 2008. - С. 125-130.
96. Фокин Л.А., Щипицын А.Г. Методы пространства состояний в задаче синтеза слабосвязанной инерциально-спутниковой навигационной системы // Вестник Южно-Уральского государственного университета. Серия «Компьютерные технологии, управление, радиоэлектроника». Выпуск 4. №14 (69), 2006. - С. 148-155.
97. Фокин Л.А., Щипицын А.Г. Моделирование и синтез точности сильносвязанной интегрированной инерциально-астро-спутниковой навигационной системы. // 7-я международная конференция «Авиация и космонавтика - 2008»: тезисы докладов. - М.: Изд-во МАИ-ПРИНТ, 2008. - С. 148.
98. Фокин Л.А., Щипицын А.Г. Модель погрешностей для задачи интегрирования бесплатформенной инерциальной и спутниковой навигационных систем. // Труды XXVI Российской школа по проблемам науки и технологий. - Екатеринбург: УрО РАН, 2006. - С. 238-240.
99. Фокин Л.А., Щипицын А.Г. Подходы к решению задач повышения точности информации об ориентации в инерциально-спутниковых навигационных системах // Материалы XXIV конференции памяти Н.Н. Острякова. - Гироскопия и навигация, 2004, №4. - С. 88.
100. Фокин Л.Α., Щипицын А.Г., Козлов А.В. Структура погрешности временного обеспечения космического сегмента спутниковой навигационной системы // Сб. научн. тр. III научно-технической конференции молодых специалистов НПО А. Ракетно-космическая техника. Системы управления ракетных комплексов. Вып. 1.4.1. - Екатеринбург, 10-11 апреля 2006 г. - Екатеринбург, 2006. - С. 105-116.
101. Фокин Л.А., Щипицын А.Г., Разнополое О.А. Математическая модель интегрированной инерциально-спутниковой навигационной системы объекта космического назначения // Сб. научн. тр. III научно-технической конференции молодых специалистов НПОА. Ракетно-космическая техника. Системы управления ракетных комплексов. Вып. 1. Ч. 1. Екатеринбург, 10-11 апреля 2006 г. - Екатеринбург, 2006. - С. 132-143.
102. Щипицын А.Г., Кондратов А.А. Пакет прикладных программ для разработки и проектирования комплексной навигационной системы маневренного летательного аппарата. // Сб. научн. тр. «Системы управления и информационные технологии» - Челябинск: Изд. центр ЮУрГУ, 2009. - С. 218-222.
103. Щипицын А.Г., Шалимов Л.Н., Кондратов А.А. Подходы к решению задач исследования корректируемой бесплатформенной инерциальной навигационной системы // Материалы 61-й научной конференции «Наука ЮУрГУ». Секции технических наук. Т. 2. - Челябинск: Издательский центр ЮУрГУ, 2009. - С. 68-73.
104. Fokin, L., Adaptive SINS/ANS/GNSS for Air-Launch Space Launcher: Algorithm Design and Performance Analysis / L. Fokin, A. Shchipitsyn, Y. Shtessel // AIAA Guidance, Navigation, and Control Conference Proceedings, USA, South Carolina, Aug. 20-23, 2007.
105. Осесимметричный кориолисовый вибрационный гироскоп. Патент на изобретение №2476824 (RU) от 24.05.2012 / ООО «Инналабс». Автор Яценко Ю.А.
106. Микромеханические датчики и системы, практические результаты и перспективы развития // Попова И.В., Лестев A.M., Семенов А.А., Пятышев Е.Н., Лурье М.С., Иванов В.А., Шабров А.А. // XII С.-Пб Международная конференция по интегрированным навигационным системам. С.-Пб., 2005, с. 262-267.
107. Григорьев В.А., Лагутенко О.И., Распаев Ю.А.. Системы и сети радиодоступа. М.: Эко Трендз, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| Бесплатформенная инерциальная навигационная система подвижного объекта | 2017 |
|
RU2676941C1 |
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2257547C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
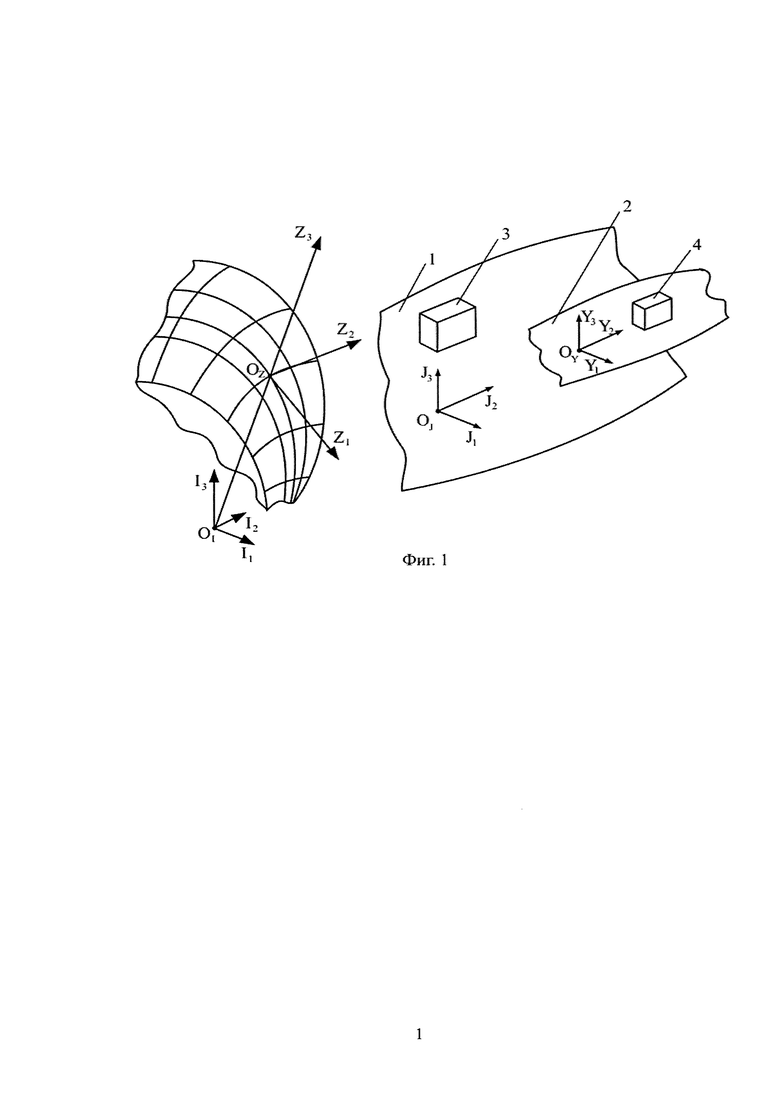
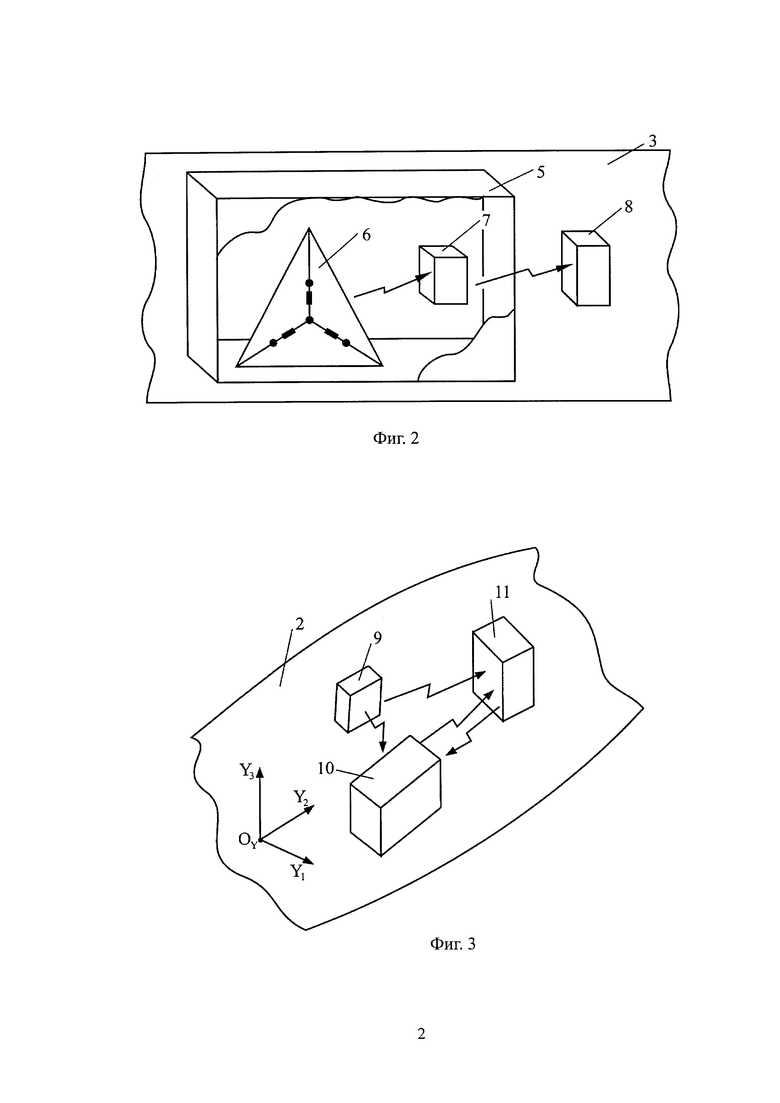
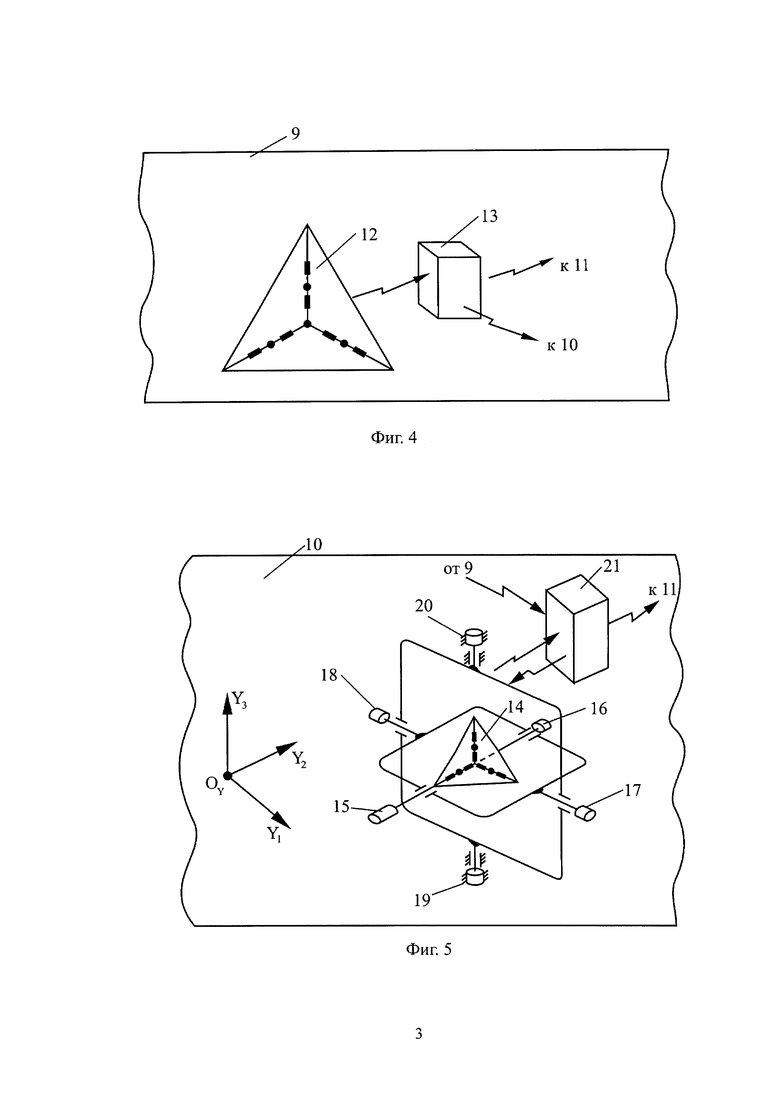
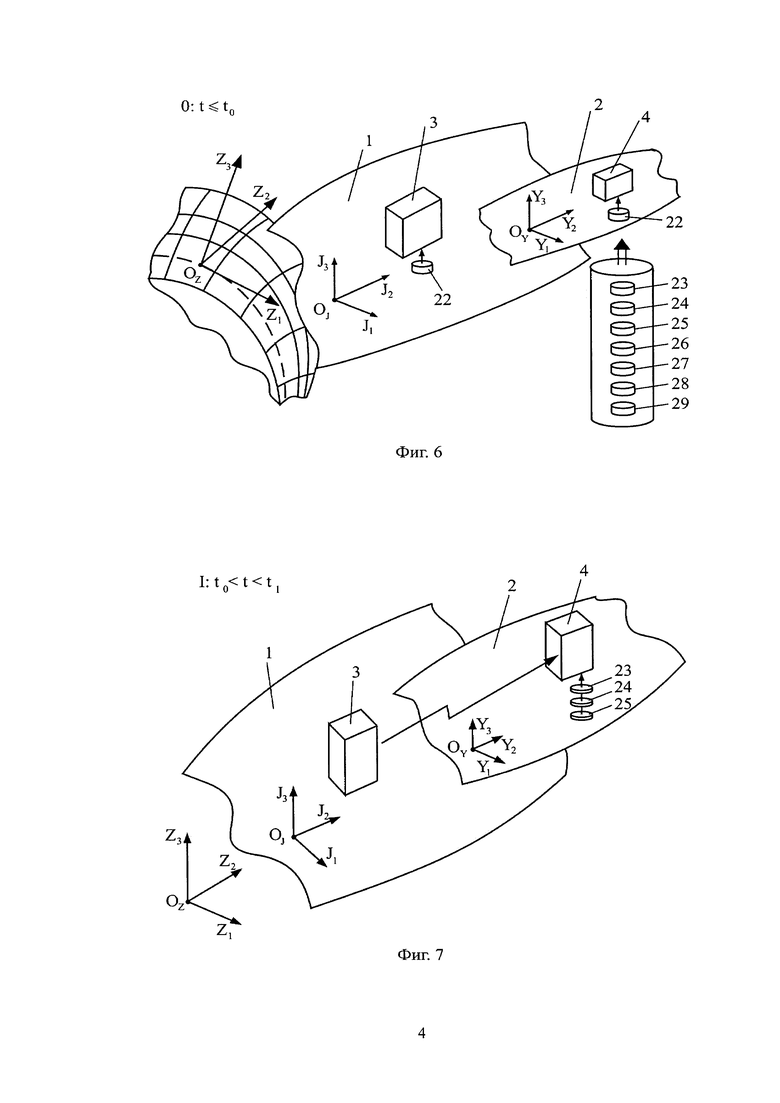
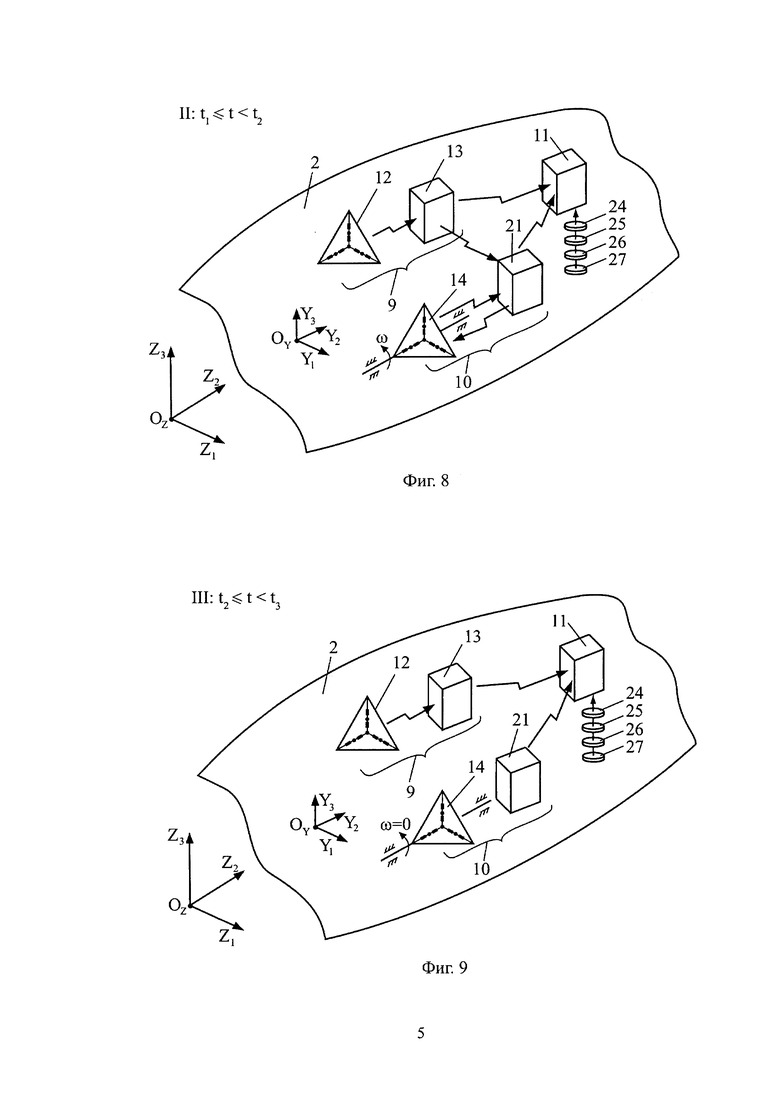
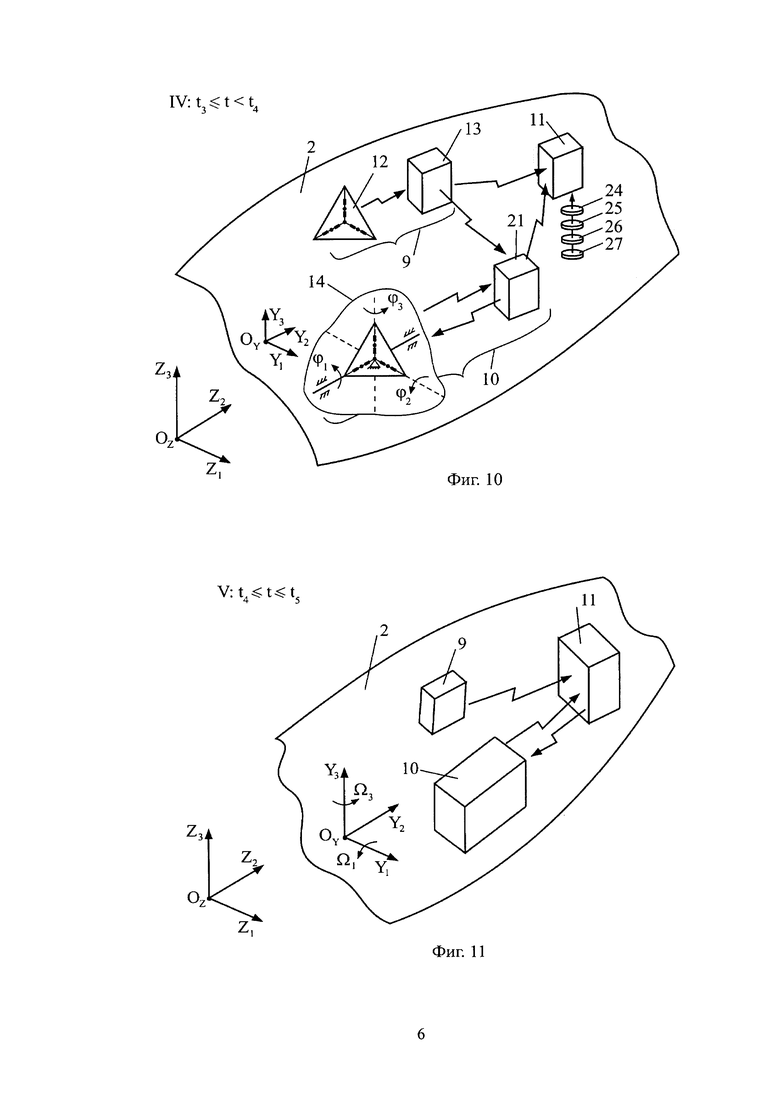
Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных комплексов для высокоскоростного маневренного объекта. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта, стартующего с подвижного носителя в требуемый момент времени t0, содержащий инерциальную навигационную систему подвижного носителя, бесплатформенную инерциальную навигационную систему подвижного объекта, при этом инерциальная навигационная система подвижного носителя состоит из блока инерциальной информации подвижного носителя, подключенного к бортовому компьютеру подвижного носителя, и генерирует навигационную информацию для управления движением подвижного носителя. Бесплатформенная инерциальная навигационная система подвижного объекта генерирует навигационную информацию для управления движением подвижного объекта после его старта с подвижного носителя и состоит из бортового компьютера подвижного объекта, к которому подключены первый блок инерциальной информации подвижного объекта, жестко закрепленный на подвижном объекте, и второй блок инерциальной информации, жестко закрепленный на оси, ориентированной на корпусе объекта и приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости, и датчиком углового положения относительно подвижного объекта. В момент времени t0 из бортового компьютера подвижного носителя в бортовой компьютер подвижного объекта подают значения переменных навигационной информации в этот момент времени, пересчитанные на оси системы координат, используемые для навигации и управления подвижным объектом, а после старта подвижного объекта управление его движением осуществляют на основе навигационной информации, генерируемой бесплатформенной инерциальной навигационной системой подвижного объекта, причем дополнительно введен двухстепенный подвес, в котором установлена ось вращения с жестко закрепленным на ней вторым блоком инерциальной информации, по осям подвеса установлены двигатели, переориентирующие ось вращения и датчики углов, обмотки управления двигателей разворота оси вращения, выходы датчиков углов и выход тахометра подключены к входу бортового компьютера подвижного объекта, выходы инерциальных датчиков первого блока инерциальной информации и второго блока инерциальной информации подключены к входу бортового компьютера подвижного объекта. После старта до окончания движения подвижного объекта навигационная информация для управления его движением снимается с выхода бортового компьютера подвижного объекта. Техническим результатом заявленного изобретения является обеспечение функциональных и точных навигационных измерений для высокоскоростного манёвренного подвижного объекта, стартующего с подвижного носителя. 6 з.п. ф-лы, 11 ил.
1. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта, стартующего с подвижного носителя в требуемый момент времени t0, содержащий инерциальную навигационную систему подвижного носителя, бесплатформенную инерциальную навигационную систему подвижного объекта, при этом инерциальная навигационная система подвижного носителя состоит из блока инерциальной информации подвижного носителя, подключенного к бортовому компьютеру подвижного носителя, и генерирует навигационную информацию для управления движением подвижного носителя, бесплатформенная инерциальная навигационная система подвижного объекта генерирует навигационную информацию для управления движением подвижного объекта после его старта с подвижного носителя и состоит из бортового компьютера подвижного объекта, к которому подключены первый блок инерциальной информации подвижного объекта, жестко закрепленный на подвижном объекте, и второй блок инерциальной информации, жестко закрепленный на оси, ориентированной на корпусе объекта и приводящейся во вращение двигателем и снабженной тахометром для измерения ее угловой скорости, и датчиком углового положения относительно подвижного объекта, в момент времени t0 из бортового компьютера подвижного носителя в бортовой компьютер подвижного объекта подают значения переменных навигационной информации в этот момент времени, пересчитанные на оси системы координат, используемые для навигации и управления подвижным объектом, а после старта подвижного объекта управление его движением осуществляют на основе навигационной информации, генерируемой бесплатформенной инерциальной навигационной системой подвижного объекта, отличающийся тем, что дополнительно введен двухстепенный подвес, в котором установлена ось вращения с жестко закрепленным на ней вторым блоком инерциальной информации, по осям подвеса установлены двигатели, переориентирующие ось вращения и датчики углов, обмотки управления двигателей разворота оси вращения, выходы датчиков углов и выход тахометра подключены ко входу бортового компьютера подвижного объекта, выходы инерциальных датчиков первого блока инерциальной информации и второго блока инерциальной информации подключены ко входу бортового компьютера подвижного объекта, после старта до окончания движения подвижного объекта навигационная информация для управления его движением снимается с выхода бортового компьютера подвижного объекта.
2. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что в блок инерциальной информации подвижного объекта введены дополнительно N инерциальных датчиков углового движения (например, датчиков угловой скорости) и N инерциальных датчиков поступательного движения (например, акселерометров), выходы указанных датчиков подключены ко входу бортового компьютера подвижного объекта, который дополнен вычислительным блоком, реализующим процедуру вычисления переменных навигационной информации с использованием избыточности первичной информации, равной N.
3. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что бортовой компьютер подвижного объекта дополнен вычислительным блоком, реализующим до момента времени старта подвижного объекта с подвижного носителя процедуру калибровки бесплатформенной инерциальной навигационной системы подвижного объекта на основе информации бесплатформенной инерциальной навигационной системы подвижного носителя, пересчитанной на связанные оси подвижного объекта.
4. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что бортовой компьютер подвижного объекта дополнен вычислительным блоком, реализующим процедуру диагностики информационных нарушений инерциальных датчиков бесплатформенной инерциальной навигационной системы подвижного объекта в течение всего интервала времени его движения.
5. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что бортовой компьютер подвижного объекта дополнен вычислительным блоком, реализующим процедуру оценивания генерируемых бесплатформенной инерциальной навигационной системой подвижного объекта переменных навигационной информации в течение всего интервала времени его движения.
6. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что бортовой компьютер подвижного объекта дополнен вычислительным блоком, реализующем процедуру определения массогеометрических характеристик подвижного объекта, а также текущего положения и движения его центра масс в течение всего интервала времени его движения.
7. Инерциальный навигационный комплекс для высокоскоростного маневренного объекта по п. 1, отличающийся тем, что на подвижном объекте введены устройства получения информации со спутниковой навигационной системы или с астронавигационной системы, или радионавигационной системы, если использование таковых допускают условия применения комплекса, а бортовой компьютер подвижного объекта дополнен вычислительным блоком, реализующем процедуру коррекции генерируемых бесплатформенной инерциальной навигационной системой подвижного объекта переменных навигационной информации в течение всего интервала времени его движения.
| Роторный пресс-автомат | 1958 |
|
SU118738A1 |
| Прибор для определения угла установки отклонителя в скважине | 1957 |
|
SU109553A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2257547C1 |
| US 3984748 A1 05.10.1976. | |||

