Область техники
Настоящее изобретение относится к области навигационной аппаратуры и, в частности, к инерциальным блокам.
Более конкретно, изобретение относится к проверке функционирования инерциального блока движущегося объекта, при этом инерциальный блок установлен на имитаторе движения.
Уровень техники
Как это известно, инерциальный блок является навигационным аппаратом, которым оснащается движущийся объект (например, воздушное судно, ракета) и который содержит измерительные инструменты, такие как гироскопы (скоростные гироскопы или свободные гироскопы) или акселерометры. Инерциальный блок использует измерения этих инструментов для предоставления бортовому компьютеру движущегося объекта относительной инерциальной информации, например, об угловой скорости и угловом ускорении движущегося объекта.
На основе этой инерциальной информации бортовой компьютер определяет пространственное местоположение движущегося объекта и посылает инструкции или команды на средства управления (например, аэродинамические рули, клапаны и т.д.) для того, чтобы направлять движущийся объект по маршруту к месту назначения или по определенной траектории.
Если инерциальный блок имеет дефект, бортовой компьютер производит свои расчеты пространственного местоположения движущегося объекта исходя из неточной инерциальной информации. Следовательно, бортовой компьютер делает ошибки на каждом шаге вычислений и посылает на средства управления ошибочные команды. В результате реальная траектория движущегося объекта сильно отличается от траектории, рассчитанной бортовым компьютером. Соответственно, если инерциальный блок имеет серьезный дефект, команды, посылаемые бортовым компьютером, являются настолько ошибочными, что существует риск дестабилизации движущегося объекта.
Для контроля и оценки функционирования инерциальных блоков часто используют имитаторы угловых движений, применяемые в комбинированном моделировании. В этом комбинированном моделировании используются, с одной стороны, реальные подсистемы (например, инерциальный блок, имитатор угловых движений, бортовое вычислительное устройство движущегося объекта, некоторые элементы движущегося объекта и т.д.) и, с другой стороны, математические модели других подсистем (например, для тяги или других элементов окружения, такие как математические модели атмосферы, Земли и т.д.).
Используемые в этом комбинированном моделировании имитаторы угловых движений позволяют воспроизводить угловые движения движущегося объекта в понятиях углового хода, угловой скорости и ускорения, однако не позволяют воспроизводить поступательные перемещения. Вследствие этого данные, выдаваемые акселерометрами инерциального блока на бортовое вычислительное устройство, являются неполными, так как не содержат никакой информации о линейном перемещении движущегося объекта.
Для решения этой проблемы в настоящее время существуют две стратегии комбинированного моделирования, отличающиеся по принимаемым в расчет акселерометрическим данным.
Первая стратегия состоит в замене исходящей от акселерометров инерциального блока информации на акселерометрическую информацию, исходящую от математической модели. Согласно этой первой стратегии отклонения от нормы, потенциально присутствующие в акселерометрической информации от инерциального блока, не могут быть детектированы комбинированным моделированием, поскольку акселерометры инерциального блока не участвуют в процессе.
Вторая стратегия состоит в том, чтобы дополнять исходящую от акселерометров инерциального блока информацию информацией, отражающей поступательное движение, вычисленной с помощью математической модели. Однако информация от акселерометров инерциального блока измеряется в фиксированной точке, соответствующей координатам имитационной лаборатории и, следовательно, не полностью отражает ту информацию, которую давали бы акселерометры для величины одной и той же физической природы по мере перемещения движущегося объекта по своей траектории вокруг земного шара. Например, гравитационное поле в неподвижной точке, в которой находится лаборатория, является неизменным, тогда как данное поле, воспринимаемое акселерометрами бортового инерциального блока движущегося объекта, перемещающегося вокруг земного шара, изменяется в зависимости от высоты и широты. Следовательно, это различие искажает траекторию движущегося объекта, полученную с использованием инерциального блока в неподвижной точке нахождения лаборатории, и делает трудным интерпретирование результатов. По этой причине эта вторая стратегия позволяет обнаруживать только существенные дефекты в одном или нескольких акселерометрах инерциального блока.
Сходным образом информация от гироскопов инерциального блока не полностью отражает информацию, получаемую при реальном движении движущегося объекта вокруг земного шара. Разложение вращения Земли по гироскопическим осям отличается в зависимости от того, расположен ли инерциальный блок в точке с неизменными координатами (как при комбинированном моделировании в лаборатории) или же он находится на борту движущегося объекта, перемещающегося вокруг земного шара. Влияние этого неполного отражения данных усложняет анализ полученных результатов комбинированного моделирования. При этом можно получить траекторию движущегося объекта, которая отличается от ожидаемой, без уверенности в том, что эта разница не связана с неполной репрезентативностью гирометрической информации. Таким образом, невозможно утверждать с уверенностью и без более полного анализа, находятся или не находятся характеристики функционирования инерциального блока в приемлемых допусках по отношению к номинальным величинам, указанным конструктором инерциального блока.
Раскрытие изобретения
Задача настоящего изобретения состоит в предложении способа проверки функционирования инерциального блока движущегося объекта, установленного на имитаторе угловых движений, причем имитатор движений находится в точке с фиксированными координатами земной системы координат, при этом проверку правильности функционирования выполняют путем сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной эталонной траекторией. Согласно изобретению для получения расчетной траектории способ содержит фазу управления движущимся объектом, содержащую множество итераций, каждая из которых включает:
- этап получения данных с помощью имитационного инструмента, на котором моделируют инерциальный блок в реальной навигационной обстановке, подавая управляющие команды, вычисленные при предыдущей итерации, для получения:
точки расчетной траектории движущегося объекта,
имитационных инерциальных данных, представляющих инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
кинематических команд, представляющих движение, подлежащее выполнению имитатором движений;
- этап, на котором посредством инерциального блока выдают измеренные инерциальные данные, представляющие движение после его выполнения имитатором движений;
- этап теоретического моделирования, на котором выполняют теоретическое моделирование измеренных инерциальных данных, выдаваемых инерциальным блоком, на основе кинематических данных, реально выполненных имитатором движений для данного движения, причем этот этап теоретического моделирования обеспечивает выдачу теоретических инерциальных данных;
- по меньшей мере, один этап компенсации, на котором выполняют компенсацию, по меньшей мере, одной погрешности, способной сделать ложным теоретическое моделирование этих измеренных инерциальных данных под действием указанных теоретических инерциальных данных, причем этот, по меньшей мере, один этап компенсации выполняют перед этапом теоретического моделирования; и
- этап вычисления, на котором вычисляют управляющие команды на основе имитационных инерциальных данных, теоретических инерциальных данных и измеренных инерциальных данных.
Соответственно, изобретение предусматривает создание системы проверки функционирования инерциального блока движущегося объекта, установленного на имитаторе угловых движений, причем имитатор движений находится в точке с фиксированными координатами земной системы координат, при этом для проверки правильности функционирования инерциального блока система содержит средства сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной эталонной траекторией. Согласно изобретению для получения расчетной траектории система дополнительно содержит следующие средства, реализующие каждую итерацию фазы управления движущимся объектом, содержащей множество итераций:
- имитационный инструмент, моделирующий инерциальный блок в реальной навигационной обстановке, на который подаются управляющие команды, вычисленные при предыдущей итерации, при этом имитационный инструмент содержит средства для получения:
точки расчетной траектории движущегося объекта,
имитационных инерциальных данных, представляющих инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
кинематических команд, представляющих движение, подлежащее выполнению имитатором движений,
- средства для получения выдаваемых инерциальным блоком измеренных инерциальных данных, представляющих движение после его выполнения имитатором движений;
- средства теоретического моделирования для теоретического моделирования измеренных инерциальных данных, выдаваемых инерциальным блоком, на основе кинематических данных, реально выполненных имитатором движений для данного движения, причем эти средства теоретического моделирования обеспечивают выдачу теоретических инерциальных данных;
- компенсационные средства для компенсации, по меньшей мере, одной погрешности, способной сделать ложным теоретическое моделирование этих измеренных инерциальных данных под действием указанных теоретических инерциальных данных, причем эти компенсационные средства используются перед средствами теоретического моделирования; и
- средства вычисления для вычисления управляющих команд на основе имитационных инерциальных данных, теоретических инерциальных данных и измеренных инерциальных данных.
Предпочтительным, но не ограничительным образом рассматриваемые в изобретении инерциальные данные содержат акселерометрическую информацию (например, ускорение) и гирометрическую информацию (например, скорости вращения). Эта информация выражается, например, в виднее трех компонент, соответствующих осям X, Y и Z системы координат инерциального блока.
За счет этого можно обнаруживать случайные дефекты, в частности, акселерометров инерциального блока, от которых исходят акселерометрические измеренные инерциальные данные.
Однако эти положения ни в коем случае не имеют ограничительного характера. Изобретение в равной мере применимо к инерциальным данным, содержащим акселерометрическую информацию (например, ускорение) и гирометрическую информацию, и к другим типам инерциальных данных, то есть к тем, которые соответствуют другим датчикам, отличным от гирометров и акселерометров. Кроме того, рассматриваемые инерциальные данные могут быть выражены в виде различного числа компонент (например, может представлять интерес только одна компонента).
Кроме того, способ и система проверки функционирования по изобретению позволяют вырабатывать траекторию для движущегося объекта, очень близкую к реальности и не обремененную проблемой, связанной с измерениями, выполненными в фиксированной точке лаборатории.
Согласно изобретению при вычислении управляющих команд и тем более при вычислении траектории движущегося объекта принимается в расчет инерциальная информация, исходящая от подлежащего проверке инерциального блока, а также дополнительная информация, вычисленная средствами теоретического моделирования и имитационным инструментом системы проверки функционирования. Таким образом, гирометрическая и акселерометрическая информация, используемая для вычисления управляющих команд и траектории движущегося объекта, отражает информацию, которую выдавал бы установленный на движущемся объекте инерциальный блок во время прохождения траектории вокруг земного шара.
Кроме того, благодаря компенсации погрешностей, которые способны сделать ложным теоретическое моделирование измеренных инерциальных данных под действием теоретических инерциальных данных, обеспечивается то, что в ходе проверки функционирования инерциального блока обнаруживаются только проблемы, связанные с инерциальным блоком, и устраняются проблемы, которые связаны с плохой репрезентацией измеренных инерциальных данных теоретическими инерциальными данными.
При таком способе упрощается анализ полученной траектории по отношению к эталонной траектории или траекториям: для анализа результатов нет необходимости привлекать эксперта. Возможна также быстрая и надежная проверка того, обладает ли подлежащий проверке инерциальный блок характеристиками, соответствующими потребностям. За счет этого получают преимущества в аспекте качества анализа и экономии затрат, связанных с проведением испытаний для оценки функционирования инерциального блока.
Предпочтительно каждую итерацию способа проверки функционирования выполняют в реальном времени с тактовой частотой, определяемой тактовой частотой движущегося объекта. Это означает, что имитационный инструмент, инерциальный блок, средства теоретического моделирования, компенсационные средства и средства вычисления системы проверки функционирования по изобретению функционируют в реальном времени с тактовой частотой, определяемой тактовой частотой движущегося объекта.
В частном примере осуществления изобретения управляющие команды вычисляют в зависимости от инерциальных данных I, определяемых как I=T2+R-T1, где Т2, R и Т1 обозначают соответственно имитационные инерциальные данные, измеренные инерциальные данные и теоретические инерциальные данные.
Таким образом, для переходных участков траектории с широким диапазоном изменения угловых величин может быть использован имитатор движений с недостаточными возможностями. Вследствие принципа I=T2+R-T1, поскольку величины R и Т1 зависят от движения, совершаемого имитатором движений, они остаются согласованными, даже если имитатор движений не выполняет команду правильно. Это позволяет вычислять точную траекторию движущегося объекта с меньшими затратами.
Согласно одному из аспектов изобретения этот, по меньшей мере, одни этап компенсации, по меньшей мере, одной погрешности содержит калибровку, по меньшей мере, одной из кинематических команд для компенсации угловых расхождений, имеющихся между осями имитатора движений и соответствующими осями земной системы координат.
Соответственно, согласно этому аспекту компенсационные средства содержат калибровочные средства для калибровки, по меньшей мере, одной из кинематических команд для того, чтобы компенсировать угловые расхождения, имеющиеся между осями имитатора движений и соответствующими осями земной системы координат.
При этом компенсируются погрешности позиционирования имитатора движений относительно земной системы координат (географический север, местная вертикаль). За счет этого устраняется создание отклонений в построении траектории вследствие приблизительного позиционирования имитатора движений относительно земной системы координат. Другими словами, устраняется плохая репрезентация измеренных инерциальных данных теоретическими инерциальными данными (то есть разница между измеренными инерциальными данными и теоретическими инерциальными данными, которой нельзя пренебречь).
Кроме того, путем приведения в соответствие также осей инерциального блока с осями имитатора движений обеспечивается возможность позиционирования инерциального блока в пространстве с помощью параметров положения (кинематических команд), выраженных непосредственно в земных координатах. За счет этого получают позиционирование в соответствии с желаемым, а кинематические данные, реально выполняемые имитатором движений, могут прямо использоваться теоретической моделью для вычисления изображения измеренных инерциальных данных, выдаваемых инерциальным блоком. При этом устраняется ввод погрешностей углового позиционирования в вычисления земного влияния, включенные в теоретическую модель.
И наконец, устранение погрешностей позиционирования имитатора движений по отношению к земной системе координат (углового расхождения между системами координат) позволяет обеспечить повторяемость и точность проводимой проверки (а именно в отношении позиционирования инерциального блока) и за счет этого гарантировать надежность результатов.
Согласно другому аспекту изобретения этот, по меньшей мере, одни этап компенсации, по меньшей мере, одной погрешности содержит ввод опережения по фазе, по меньшей мере, одного из кинематических данных, реально выполняемых имитатором движений, перед их вводом в этап теоретического моделирования для синхронизации теоретических инерциальных данных с измеренными инерциальными данными.
Соответственно, согласно этому другому аспекту компенсационные средства содержат средства ввода опережения по фазе, по меньшей мере, одного из кинематических данных, реально выполняемых имитатором движений, перед их выдачей средствам теоретического моделирования для синхронизации теоретических инерциальных данных с измеренными инерциальными данными.
При этом компенсируются смещения по времени, связанные со скоростями срабатывания различных элементов системы проверки функционирования по изобретению. Это позволяет обеспечивать синхронизацию по времени между теоретическими инерциальными данными и измеренными инерциальными данными. Этот этап тем более важен, что итерации процесса проверки функционирования по изобретению выполняются в реальном времени.
Кроме того, при каждой итерации процесса проверки обеспечивается однородность по времени измеренных инерциальных данных и теоретических инерциальных данных, которые используются для вычисления управляющих команд. За счет этого устраняется создание расхождений в вычислениях при каждой итерации, в то время как накопление этих расхождений при вычислении всей траектории движущегося объекта могли бы приводить к значительным последствиям в построении траектории движущегося объекта, вырабатываемой способом и системой проверки функционирования, что было бы особенно губительно для интерпретации этой траектории.
В том случае когда инерциальный блок признается неадекватным в результате проверки правильности функционирования, способ проверки может дополнительно содержать этап диагностики, выполняемый путем сравнения совокупностей, образованных на основе измеренных инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта, с совокупностями, образованными на основе теоретических инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта.
Соответственно, система проверки функционирования может содержать средства диагностики, которые, когда инерциальный блок признается неадекватным системой проверки функционирования, выполнены с возможностью сравнения совокупностей, образованных на основе измеренных инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта, с совокупностями, образованными на основе теоретических инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта.
Таким образом, путем образования и сравнения совокупностей для каждой компоненты инерциальных данных (то есть на каждой оси инерциального блока для гирометрических и акселерометрических данных) можно диагностировать, какой или какие каналы проверяемого инерциального блока являются дефектными.
В частном примере осуществления изобретения способ проверки функционирования дополнительно содержит в ходе каждой итерации этап ввода опережения по фазе кинематических команд перед их выдачей имитатору движений для компенсации задержки выполнения, свойственной имитатору движений.
Соответственно, в этом частном примере осуществления изобретения система проверки функционирования дополнительно содержит средства для ввода опережения по фазе кинематических команд перед их выдачей имитатору движений для компенсации задержки выполнения, свойственной имитатору движений.
За счет этого можно компенсировать запаздывание выполнения имитатором движений, что обеспечивает синфазность измеренных инерциальных данных, выдаваемых инерциальным блоком, и имитационных инерциальных данных, выдаваемых имитатором движений. Это позволяет обеспечивать репрезентативность не только реализации инерциального блока, но также каких-либо других датчиков (например, устройства самонаведения), имеющихся на имитаторе движений.
Предпочтительно кинематические команды имеют параметры, синхронные с параметрами реально выполняемых кинематических данных, а амплитуды этих реально выполняемых кинематических данных и кинематических команд согласованы.
Таким образом, кинематические команды согласованы с движениями, реально выполняемыми имитатором движений, что позволяет получать имитацию инерциального блока в одной фазе с кинематикой движущегося объекта, выдаваемой имитационным инструментом. Это очень важно, особенно для каких-либо датчиков, которые установлены вместе с инерциальным блоком на имитаторе движений и для которых несинхронные параметры вызывали бы запаздывания в сервосистеме. Это порождало бы трудности интерпретации результатов проверки, связанных с этими другими датчиками.
В частном примере осуществления изобретения способ проверки функционирования дополнительно содержит при каждой итерации этап маскирования после этапа получения и перед этапом ввода опережения по фазе в кинематические команды, так что этот этап маскирования получает кинематические команды и выдает маскированные кинематические команды на этап ввода опережения по фазе в кинематические команды для маскирования, по меньшей мере, части фаз движения.
Соответственно, система проверки функционирования может содержать после выхода имитационного инструмента и перед входом средств ввода опережения по фазе в кинематические команды маскировочные средства, которые получают кинематические команды и выполнены с возможностью выдачи маскированных кинематических команд средствам ввода опережения по фазе в кинематические команды для маскирования, по меньшей мере, части фаз движения.
За счет этого можно следовать траектории, при которой угловой ход движущегося объекта больше того, который предусмотрен имитатором движений.
Согласно особенности изобретения, по меньшей мере, часть маскированных кинематических команд зависит от внутренней закономерности этапа маскирования, которая не зависит от кинематических команд.
Это позволяет следовать траектории, в которой движущийся объект может совершать несколько петлевых или круговых движений при использовании имитатора движений с ограниченным диапазоном углового хода.
В частном примере осуществления изобретения способ проверки функционирования может дополнительно содержать фазу инициализации, содержащую множество итераций, причем каждая итерация фазы инициализации содержит:
- этап получения с помощью имитационного инструмента:
точки расчетной траектории движущегося объекта,
имитационных инерциальных данных, представляющих инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
кинематических команд, представляющих движение, подлежащее выполнению имитатором движений,
- а также этап выдачи измеренных инерциальных данных, этап теоретического моделирования, этап компенсации, этап вычисления фазы управления процесса проверки функционирования.
Эта фаза инициализации соответствует фазе, в которой движущийся объект не управляется, поскольку не соблюдены определенные условия для управления движущимся объектом, такие как, например, достаточная скорость.
Краткий перечень чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания не имеющих ограничительного характера примеров осуществления со ссылками на прилагаемые чертежи. На чертежах:
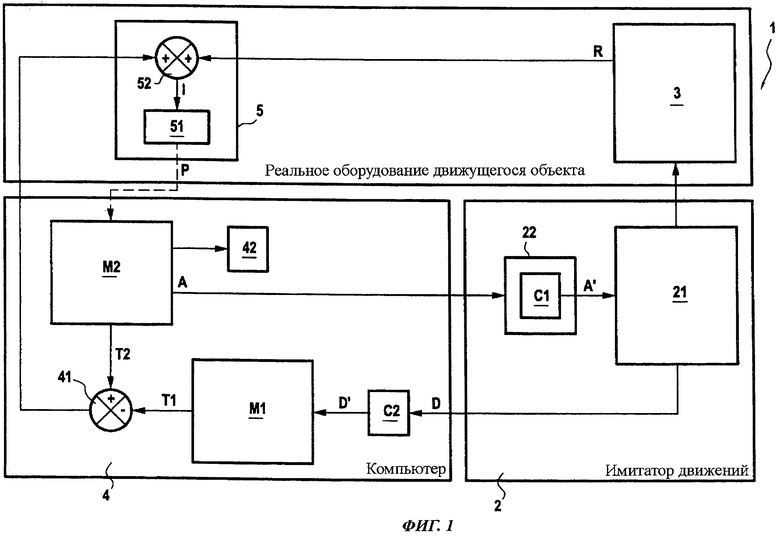
фиг.1 изображает систему проверки функционирования инерциального блока движущегося объекта согласно первому примеру осуществления,
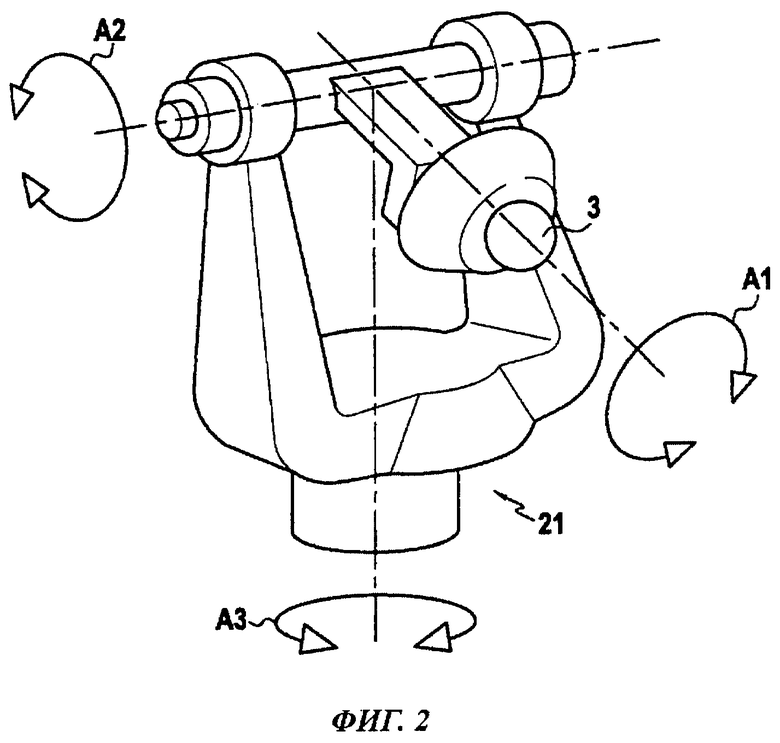
фиг.2 схематично изображает пример выполнения «трехосного» стола имитатора движения,
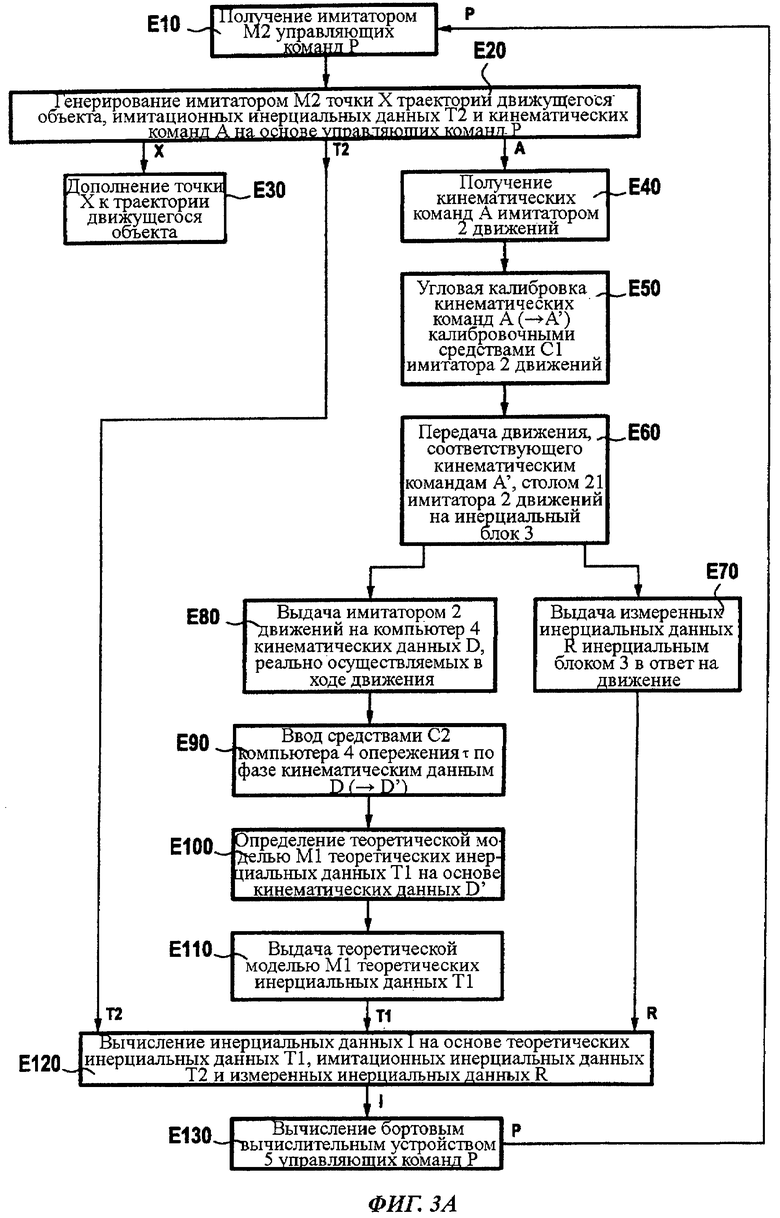
фиг.3А изображает в виде блок-схемы основные этапы, выполняемые при каждой итерации фазы управления процесса проверки функционирования по изобретению для выработки траектории движущегося объекта при выполнении этих этапов системой проверки функционирования по фиг.1 в частном примере осуществления,
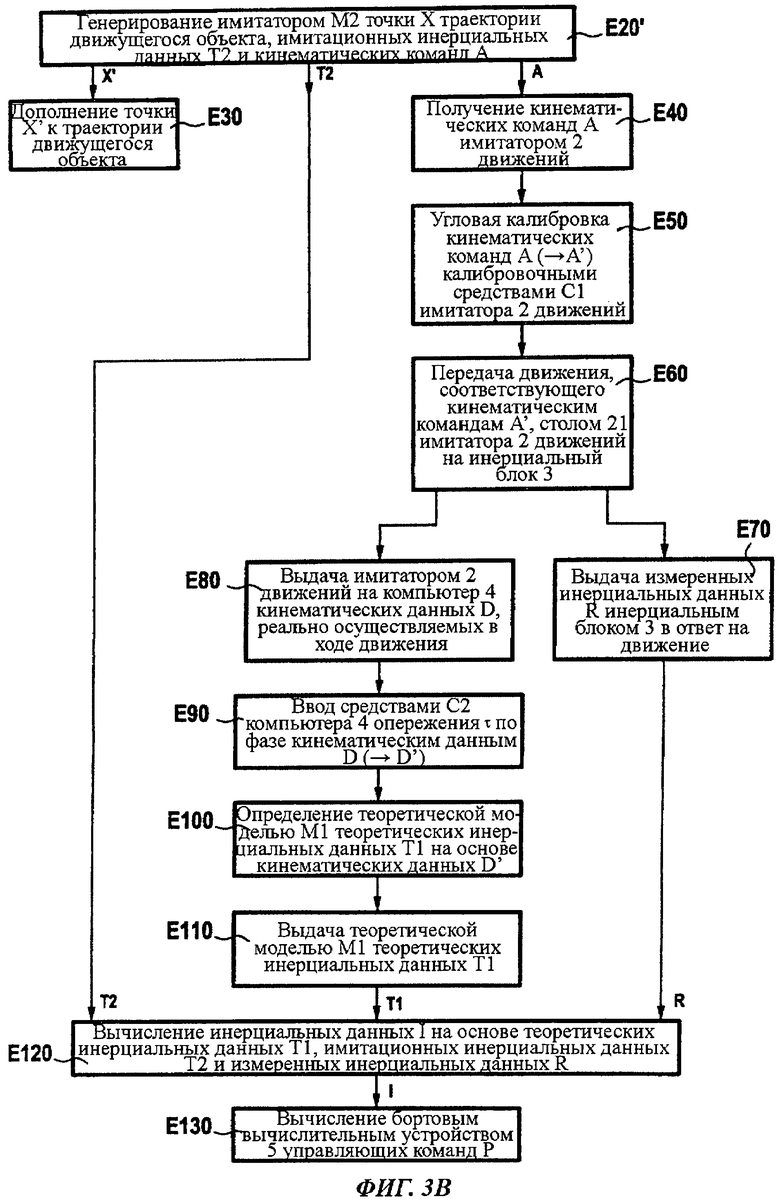
фиг.3В изображает в виде блок-схемы основные этапы, выполняемые в ходе различных итераций во время фазы инициализации, которая может предшествовать фазе управления, в частном примере осуществления,
фиг.4 изображает в виде блок-схемы основные этапы, выполняемые в процессе проверки правильности функционирования по изобретению для признания инерциального блока адекватным или неадекватным на основании траектории движущегося объекта, полученной системой проверки функционирования по фиг.1, в частном примере осуществления,
фиг.5 схематично изображает систему проверки функционирования инерциального блока движущегося объекта во втором примере осуществления изобретения,
фиг.6 схематично изображает систему проверки функционирования инерциального блока движущегося объекта в третьем примере осуществления изобретения,
фиг.7 схематично изображает пример траектории движущегося объекта.
Осуществление изобретения
В описанных здесь различных примерах осуществления рассматриваемые инерциальные данные (а именно измеренные инерциальные данные R, имитационные инерциальные данные Т2, теоретические инерциальные данные Т1 и инерциальные данные I) содержат акселерометрическую и гирометрическую информацию, выраженную соответственно в виде трех компонент вдоль осей X, Y и Z инерциального блока.
Однако эти предпосылки не являются ограничительными. Само собой разумеется, что изобретение может использоваться применительно к инерциальным данным, которые содержат только акселерометрическую или только гирометрическую информацию или содержат другие типы инерциальных данных, соответствующие другим типам датчиков, помимо гирометров и акселерометров.
В варианте осуществления инерциальные данные могут выражаться в виде различного числа компонент (например, может представлять интерес одна единственная компонента).
Как уже было описано, изобретение предусматривает создание способа и системы проверки функционирования инерциального блока движущегося объекта, установленного на имитаторе локализованных угловых движений, который находится в точке, имеющей фиксированные координаты в земной системе координат. Эту проверку функционирования осуществляют путем сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной предварительно заданной эталонной траекторией.
Траекторию движущегося объекта рассчитывают с помощью структуры комбинированного моделирования с использованием, с одной стороны, реальных подсистем (например, бортового вычислительного устройства движущегося объекта, инерциального блока движущегося объекта, имитатора угловых движений) и, с другой стороны, числовых моделей движущегося объекта (например, тяги, потребления топлива, инерциального блока) и его окружения (например, атмосферы, земного воздействия).
В описанных здесь примерах осуществления эта траектория образована различными точками, причем каждая точка определяется тремя параметрами (долготой, широтой, высотой) в земной системе координат.
Комбинированное моделирование, применяемое в изобретении системой проверки для вычисления этой траектории, содержит, по меньшей мере, одну фазу, называемую фазой управления, во время которой движущийся объект управляется с помощью управляющих команд, генерируемых бортовым компьютером. Предварительная фаза, предшествующая этой фазе управления, называемая фазой инициализации, во время которой движущийся объект может перемещаться без управления (например, поскольку после запуска движущегося объекта его скорость недостаточна), может также рассматриваться как начало моделирования, как будет описано дальше.
Фаза управления процесса проверки функционирования по изобретению содержит множество повторений операций или итераций, выполняемых с помощью упомянутой структуры комбинированного моделирования, проводимого в реальном времени и по замкнутому циклу. Каждая из этих итераций позволяет получать точку расчетной траектории движущегося объекта.
Первый пример осуществления изобретения
На фиг.1 в первом примере осуществления схематично показана система 1 проверки функционирования по изобретению с применением этой структуры комбинированного моделирования.
Система 1 проверки функционирования содержит имитатор 2 угловых движений, содержащий «трехосный» стол 21, управляемый с помощью блока 22 числового управления и выполненный с возможностью установки на нем подлежащего проверке реального инерциального блока 3 движущегося объекта. Пример «трехосного» стола для установки инерциального блока 3 показан на фиг.2. Такой стол известен специалисту в данной области и здесь подробно не описывается.
В варианте выполнения имитатор угловых движений может содержать столы других типов, например «пятиосный» стол.
Имитатор 2 угловых движений может выполнять угловые перемещения вокруг оси А1 крена, оси А2 тангажа и оси A3 рыскания. Соответственно, он может передавать на инерциальный блок 3 угловые перемещения вокруг осей А1, А2 и A3.
Точнее, эти угловые движения передаются столом 21 на инерциальный блок 3 в зависимости от числовых кинематических команд А', получаемых от блока 22 управления. Эти кинематические команды А' содержат:
- угловое положение,
- угловую скорость и
- угловое ускорение,
причем каждый из параметров выражается в виде трех компонент, соответствующих различным осям имитатора 2 перемещений (крена, тангажа и рысканья).
В описываемом здесь примере блок 22 числового управления снабжен экраном (на чертеже не показан), на котором можно видеть числовые команды, передаваемые на инерциальный блок 3 «трехосным» столом 21 имитатора 2 движений.
Инерциальный блок 3 содержит измерительные инструменты, такие как гироскопы (скоростные гироскопы или свободные гироскопы) и акселерометры (на чертеже не показаны), позволяющие ему выдавать измеренные инерциальные данные R (измеренную гирометрическую и акселерометрическую информацию) в ответ на движение, выполняемое имитатором 2 движений и соответствующее кинематической команде А'.
Следует отметить, что инерциальный блок 3 может быть установлен на имитаторе 2 движений сам по себе или встроен в движущийся объект (на фиг.1 не показано) или, по меньшей мере, в часть движущегося объекта.
Кроме того, имитатор 2 угловых движений связан, по меньшей мере, с информационным устройством или компьютером 4, используемым для выполнения элементов числового моделирования структуры комбинированного моделирования, а именно в данном случае - теоретической модели М1 и имитационного инструмента (или имитатора) М2.
Теоретическая модель М1 предназначена для выдачи теоретического отображения Т1 (в контексте изобретения - теоретических инерциальных данных) инерциальных данных, измеренных инерциальным блоком 3, установленным на имитаторе 2 движений (то есть в точке фиксированных координат в лаборатории, в которой находится имитатор 2 движений). Другими словами, теоретические инерциальные данные, выдаваемые теоретической моделью М1, представляют инерциальные данные, которые были бы измерены инерциальным блоком 3 в точке фиксированных координат, если бы он был совершенен.
Для расчета теоретического изображения Т1 теоретическая модель М1 опирается на математические модели физических явлений, воздействующих на инерциальный блок 3 (теоретические выражения, моделирующие земные явления, такие как вращение Земли или локальная сила тяготения), а также на воздействия, связанные с угловым движением, совершаемым имитатором 2 движений. Конкретно, она использует кинематические данные D', выражающие угловое положение, угловые скорости и ускорения, передаваемые на инерциальный блок 3 имитатором 2 движений.
Имитационный инструмент М2 моделирует инерциальный блок 3 в реальной навигационной обстановке, то есть в навигационной обстановке навигационного перемещения вокруг земного шара, с учетом влияния локальных земных явлений на инерциальный блок (например, локальной силы тяготения, скорости земного вращения). Такой имитационный инструмент известным образом опирается на математические модели элементов, образующих движущийся объект (а именно, такие как модель механики полета и модель инерциального блока, представляющие номинальные характеристики (средние величины по допускам) по техническим условиям инерциального блока 3), и его окружение.
В данном примере во время фазы управления имитационный инструмент М2 вычисляет на основе команд Р управления:
- точку Х траектории движущегося объекта в реальной навигационной обстановке,
- имитационные инерциальные данные Т2, представляющие инерциальные данные, которые инерциальный блок 3 выдавал бы в такой обстановке для этой точки траектории, и
- кинематические команды А, подаваемые на имитатор 2 движений и представляющие движение, которое следует передать на инерциальный блок 3 в соответствии с этой точкой траектории.
Теоретическая модель М1 и имитационный инструмент М2 представляются в виде программных средств, например, записанных в ПЗУ или в энергонезависимой памяти компьютера 4.
Кроме того, система 1 проверки функционирования содержит бортовое вычислительное устройство 5 движущегося объекта, связанное, с одной стороны, с инерциальным блоком 3 и, с другой стороны, с компьютером 4. Задачей бортового вычислительного устройства 5 является управление и направление движущегося объекта на основе инерциальных данных I. Оно снабжено «управляющим» модулем 51, предназначенным для выработки команд на поворот (или управляющих команд) для функций управления движущимся объектом, совместимых с его характеристиками (например, команд на поворот аэродинамических органов управления, команд на открытие клапанов и т.д.). «Управляющий» модуль 51 является автоматическим устройством, которое благодаря инерциальным данным I проверяет в реальном времени выполнение предварительно заданного порядка и при необходимости адаптирует уровень порядка подлежащих поступлению команд в зависимости от заданной траектории.
В целом бортовое вычислительное устройство 5 генерирует управляющие команды на основе инерциальных данных, выдаваемых гирометрами и акселерометрами инерциального блока движущегося объекта. В системе 1 проверки функционирования по изобретению инерциальные данные I, используемые бортовым вычислительным устройством 5 для определения управляющих команд Р, зависят от измеренных инерциальных данных R, имитационных инерциальных данных Т2 и теоретических инерциальных данных Т1, как будет более подробно пояснено дальше.
Следует отметить, что различные связи между компьютером 4, имитатором 2 движений, бортовым вычислительным устройством 5 и инерциальным блоком 3 могут быть реализованы с помощью электрических или оптических кабелей, по радио или другими средствами.
Далее со ссылкой на фиг.3А будут описаны основные этапы, выполняемые системой 1 проверки функционирования при каждой итерации фазы управления процесса проверки функционирования по изобретению для проверки точки траектории движущегося объекта, связанного с инерциальным блоком 3.
Процесс итерации фазы управления
Как уже было описано, каждая итерация фазы управления процесса проверки функционирования по изобретению выполняется различными структурными органами системы 1 проверки функционирования в реальном времени с тактовой частотой, задаваемой тактовой частотой движущегося объекта. Точнее, при каждой итерации вычисления и обмен данными между бортовым вычислительным устройством 5 движущегося объекта, имитатором М2, теоретической моделью М1, имитатором 2 угловых движений, инерциальным блоком 3 осуществляются на реальной частоте синхронизации операций, выполняемых движущимся объектом, и предпочтительно в пределах промежутка времени меньше периода, соответствующего этой частоте.
В ходе итерации i при получении управляющих команд Р, генерируемых бортовым вычислительным устройством 5 при итерации i-1, на основе инерциальных данных I (этап Е10), числовой имитационный инструмент М2 генерирует точку Х траектории движущегося объекта в реальной навигационной обстановке (этап Е20). Для этого имитационный инструмент М2 использует модель механики полета, которая позволяет вычислять в ответ на управляющие команды Р и в реальной навигационной обстановке реальное положение движущегося объекта, а именно его долготу, широту и высоту (то есть точку траектории). При этом данная точка Х траектории дает приращение траектории движущегося объекта, выработанной процессом проверки функционирования по изобретению при каждой итерации фазы управления (этап Е30).
В ходе этапа Е20 имитатор М2 обеспечивает также получение в реальном времени:
- имитационных инерциальных данных Т2, представляющих инерциальные данные, которые предположительно должны быть измерены инерциальным блоком 3 для новой точки Х расчетной траектории в реальной навигационной обстановке, то есть во время перемещения движущегося объекта вокруг земного шара; и
- числовые кинематические команды А, указывающие движение, которое должно быть выполнено имитатором 2 движений в ответ на управляющие команды Р (движение, которое должен выполнить движущийся объект для достижения новой точки Х траектории). Эти кинематические команды А вычисляют с помощью модели теории полета и в данном случае содержат угловые положения, угловые скорости и угловые ускорения применительно к осям имитатора 2 движений. В варианте осуществления кинематические команды А, обеспечиваемые инструментом М2 числового моделирования, не обязательно содержат все эти величины. Они могут содержать, например, только угловые положения и угловые скорости. В этом варианте осуществления кинематические команды в дальнейшем дополняются блоком 22 числового управления с помощью методов, известных специалисту в данной области (например, метод дифференцирования угловых скоростей для получения угловых ускорений), с тем чтобы в момент их выполнения «трехосным» столом 21 полностью иметь в распоряжении угловые положения, угловые скорости и угловые ускорения для каждой оси имитатора 2 движений.
Кинематические команды А далее передаются имитационным инструментом М2 на имитатор 2 движений.
При получении имитатором 2 движений кинематических команд А (этап Е40) блоком 22 числового управления производится калибровка, по меньшей мере, части кинематических команд А (этап Е50). Эта калибровка имеет целью компенсацию угловых расхождений (или отклонений) αR, αT и αL, имеющихся между осями имитатора 2 движений (соответственно осью крена, осью тангажа и осью рыскания) и осями, соответствующими земной системе координат.
Для выполнения этой калибровки блок 22 числового управления содержит компенсационные средства С1, приспособленные для ввода величин угловых расхождений αR, αT и αL в часть кинематических команд А. Точнее, величины αR, αT и αL вычитаются компенсационными средствами С21 из соответствующих компонент углового положения, содержащихся в кинематических командах А. Таким образом, угловые положения, осуществляемые на различных осях имитатора 2 движений, представляют угловые расхождения, имеющиеся между осями имитатора 2 движений и соответствующими осями земной системы координат (то есть географическим севером и осью рысканья имитатора движений, вертикалью местоположения и осью тангажа имитатора движений, вертикалью местоположения и осью крена имитатора движений).
Предпочтительно угловые расхождения αR, αT и αL оцениваются предварительно в ходе фазы параметризации, предшествующей процессу проверки функционирования по изобретению, как это будет описано далее.
Таким образом, команды А' движений, полученные после угловой калибровки кинематических команд А, выражены непосредственно в координатах земной системы координат. Эти команды А' выдаются блоком 22 числового управления на трехосный стол 21 имитатора 2 движений для того, чтобы он передал соответствующее движение на инерциальный блок 3 (этап Е60).
В ответ на движение, переданное имитатором 2 движений на инерциальный блок 3, инерциальный блок 3 выдает измеренные инерциальные данные R (этап Е70). Как было упомянуто выше, эти измеренные инерциальные данные R поставляются гирометрами и акселерометрами инерциального блока 3.
Далее, одновременно кинематические данные D, реально выполняемые имитатором 2 движений в инерциальном блоке 3, передаются имитатором 2 движений на компьютер 4 (этап Е80) для ввода в теоретическую модель М1. Эти кинематические данные D измеряются угловыми датчиками, расположенными на имитаторе 2 движений.
Перед вводом в теоретическую модель М1 кинематические данные D обрабатываются средствами С2 компьютера 4 для того, чтобы придать им опережение τ по фазе (этап Е90). Это опережение τ по фазе должно обеспечивать синхронность по времени между теоретическими инерциальными данными Т1, генерируемыми теоретической моделью М1, и измеренными инерциальными данными R, выдаваемыми инерциальным блоком 3 при каждой итерации процесса проверки функционирования.
В данном примере осуществления это опережение по фазе производится с помощью соответствующего алгоритма средствами С2 для различных компонент углового положения и угловой скорости, содержащихся в кинематических данных D, независимым образом для каждой компоненты. Этот алгоритм использует величины компонент углового положения и угловой скорости, содержащиеся в кинематических данных D текущей итерации i и в числе N предыдущих итераций (например, итераций I-1 и i-2), а также средних коэффициентов приращения этих угловых положений или угловых скоростей между итерациями (например, между i и i-2). Такой алгоритм известен специалисту в данной области и здесь подробно не описывается.
В качестве варианта в другом примере выполнения возможно применение опережения τ по фазе также для ускорения.
Предпочтительно опережение τ по фазе, выполняемое средствами С2, определяется в ходе предварительной фазы установки параметров перед процессом проверки функционирования, как это будет описано дальше.
Кинематические данные D' на выходе средств С2 далее вводятся в теоретическую модель М1, которая на основе этих кинематических данных вычисляет теоретические инерциальные данные Т1 (этап Е100).
Как уже было описано, для генерирования теоретических инерциальных данных Т1 теоретическая модель М1 содержит математическую модель, которая моделирует физические явления, воздействующие на идеальный инерциальный блок, находящийся в точке соответствующих фиксированных координат в лаборатории.
В данном примере осуществления используемая теоретической моделью М1 математическая модель базируется на следующих уравнениях для вычисления теоретических гирометрических инерциальных данных G1 и теоретических акселерометрических инерциальных данных A1, относящихся к осям теоретических датчиков и содержащихся в теоретических инерциальных данных Т1:
G1=ΩT+ω и
А1=ГR+2×ΩT∧VR-g,
где:
ΩT - мгновенная скорость вращения Земли в системе координат инерциального блока;
ω - скорость вращения, осуществляемого имитатором 2 движений, выведенная из выдаваемых имитатором 2 движений кинематических данных в системе координат инерциального блока;
ГR - ускорение относительно Земли, теоретически приведенное к системе координат инерциального блока;
VR - скорость относительно Земли, теоретически отнесенная к системе координат инерциального блока;
g - локальная сила тяготения в системе координат инерциального блока;
при этом величины G1, A1, ΩT, ω, ГR, VR и g обозначают векторы.
Теоретические инерциальные данные Т1 считаются представляющими инерциальные данные, измеренные инерциальным блоком 3, установленным на имитаторе 3 движений, то есть инерциальные данные, измеренные в точке, имеющей фиксированные координаты лаборатории. Благодаря применению опережения τ по фазе средствами С2 теоретические инерциальные данные Т1, выдаваемые теоретической моделью М1 (этап Е110), и измеренные инерциальные данные R, выдаваемые инерциальным блоком 3 (этап Е70), синхронны.
Таким образом, в аспекте изобретения средства С1 угловой компенсации и средства С2 ввода опережения по фазе представляют средства компенсации погрешностей, способных делать ложным теоретическое моделирование измеренных инерциальных данных R под действием теоретических инерциальных данных Т1. Выгодным образом эти компенсационные средства действуют перед применением теоретической модели М1 для того, чтобы обеспечивать хорошую репрезентативность измеренных инерциальных данных R теоретическими инерциальными данными Т1.
Измеренные инерциальные данные R (выдаваемые инерциальным блоком 3), теоретические инерциальные данные Т1 (выдаваемые теоретической моделью М1) и имитационные инерциальные данные Т2 (выдаваемые имитатором М2), генерируемые при итерации i, далее используются для вычисления инерциальных данных I (этап Е120), определяемых уравнением:
I=R+T2-T1
Для этого используют средства 41 и 52 арифметических операций, известные специалисту в данной области и в данном примере осуществления расположенные соответственно в компьютере 4 и в бортовом вычислительном устройстве 5, как показано на фиг.1. При этом вначале средства 41 арифметических операций вычисляют разность Т2-Т1, а затем средства 52 арифметических операций на втором шаге суммируют эту разность с инерциальными данными R.
В варианте осуществления средства 41 и 52 могут быть расположены совместно в компьютере 4 или в бортовом вычислительном устройстве 5 или в другом устройстве, не показанном на фиг.1 (например, в другом компьютере). Кроме того, могут выполняться другие операции при условии, что они ведут к вычислению инерциальных данных I в соответствии с данным выше определением.
При вычислении теоретического выражения Т1 измерений, которые инерциальный блок 3 предположительно должен выполнить в фиксированной точке, путем вычитания Т1 из R и добавления вклада имитационных инерциальных данных Т2 (представляющих измерения, выполненные инерциальным блоком, который встроен в движущийся объект, перемещающийся вокруг земного шара), получают траекторию, представляющую реальность. Следует отметить, что за счет вычитания Т1 из R устраняют вносимый инерциальным блоком 3 вклад до величины η (η=IR-Т1I), где η тем больше, чем более несовершенен инерциальный блок 3.
Далее управляющие команды Р вычисляют в зависимости от инерциальных данных I с помощью бортового вычислительного устройства 5 (этап Е130) на основе заданной траектории, как уже было описано.
Затем эти управляющие команды Р выдаются на имитатор М2 в ходе итерации i+1, и далее этапы Е 10-Е 130 повторяют в процессе каждой итерации фазы управления для выработки траектории движущегося объекта.
Итерации прекращают после полного прогона всей заданной траектории. При этом получают расчетную траекторию движущегося объекта, выработанную системой 1 проверки функционирования (с отправными точками Х траектории, генерированными имитационным инструментом М2 при каждой итерации фазы управления).
Полученную таким образом траекторию движущегося объекта сравнивают с помощью средств 42 проверки в компьютере 4, по меньшей мере, с одной эталонной траекторией, предварительно определенной для проверки правильности функционирования инерциального блока 3. Эта фаза проверки правильности функционирования может проводиться в различное время, по окончании итераций или впоследствии.
В варианте осуществления она может проводиться средствами проверки функционирования, содержащимися в другом устройстве помимо компьютера 4, например, в другом компьютере.
Фаза проверки правильности функционирования
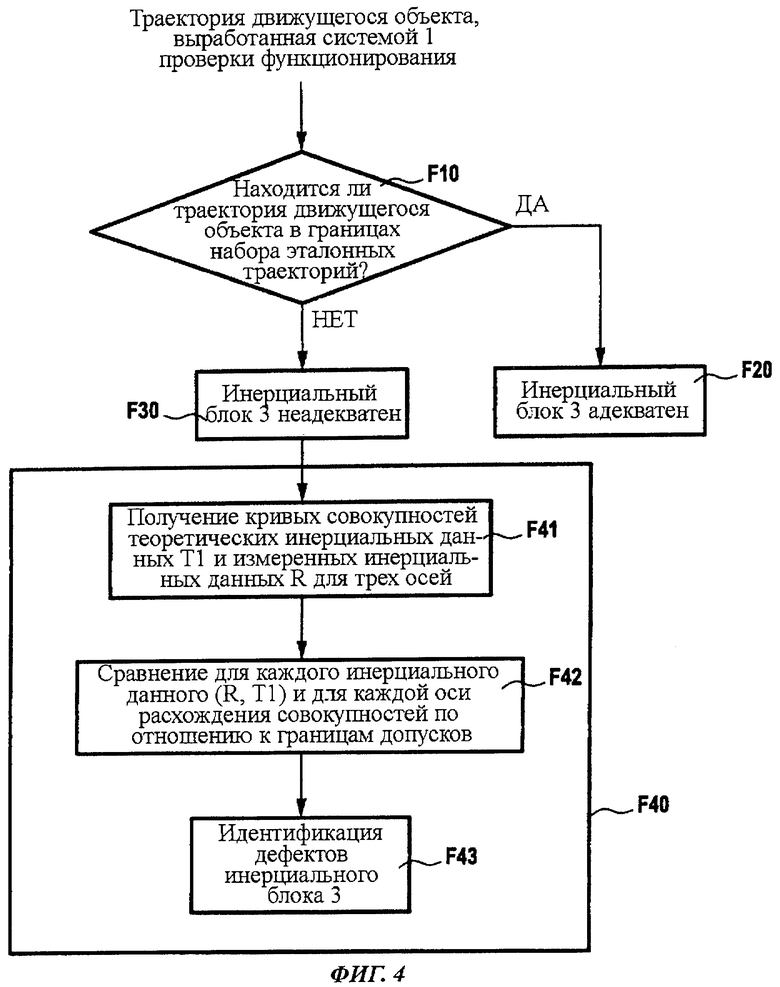
Далее со ссылкой на фиг.4 будет описана фаза проверки правильности функционирования инерциального блока 3, выполняемая информационными средствами 42 проверки функционирования в компьютере 4.
В данном примере осуществления траекторию движущегося объекта, вычисленную системой 1 проверки функционирования, сравнивают с набором эталонных траекторий. Точнее, в ходе этапа F10 определяют, находится ли траектория, выработанная системой 1 проверки функционирования, в границах набора эталонных траекторий.
Предпочтительно этот набор эталонных траекторий определяют в ходе фазы предварительной параметризации перед процессом проверки функционирования по изобретению, как это будет описано дальше.
В варианте осуществления возможно сравнение этой траектории, выработанной системой 1 проверки функционирования, с одной эталонной траекторией, а не с набором эталонных траекторий.
Кроме того, в ходе этого этапа F10 проверки правильности функционирования сравнение между расчетной траекторией движущегося объекта и одной или несколькими эталонными траекториями может проводиться на одном или нескольких участках траекторий в зависимости, например, от дефектов инерциального блока, которые желают выявить.
Если в ходе этапа F10 проверки правильности функционирования определяют, что выработанная системой 1 проверки функционирования траектория движущегося объекта находится в границах набора эталонных траекторий, инерциальный блок 3 признается адекватным (этап F20). Это означает, что функционирование инерциального блока 3 находится в допустимых границах относительно этих границ для совершенного инерциального блока и блок соответствует потребностям, для которых он создан. В этом случае инерциальный блок 3 может обладать характеристиками, которые не являются номинальными, однако остаются в пределах границ или допусков, указанных в его технических условиях.
В противном случае инерциальный блок 3 признается неадекватным (этап F30), то есть имеющим существенные дефекты. При этом движущийся объект не достигает цели, определенной заданной траекторией, хотя бортовое вычислительное устройство 5 считает, что эта цель достигнута (в соответствии с траекторией, определенной бортовым вычислительным устройством, по отношению к заданной траектории).
В данном случае средства 42 проверки могут выгодным образом провести этап диагностики (этап F40) для того, чтобы идентифицировать дефектный канал или каналы инерциального блока 3, то есть идентифицировать, с одной стороны, содержит ли инерциальный блок 3 дефект на уровне акселерометрических и/или гирометрических измерений, и, с другой стороны, идентифицировать, на какой оси или осях (Х и/или Y и/или Z) находится этот дефект или эти дефекты.
Для того чтобы обеспечить возможность проведения этого этапа диагностики, при каждой итерации i, выполненной для генерирования траектории движущегося объекта, записывают в памяти величины теоретических инерциальных данных Т1 и измеренных инерциальных данных R,
На основе этих записанных величин R и Т1 для каждой итерации i фазы управления и для каждой компоненты инерциальных данных (а именно, гирометрических и акселерометрических на каждой из различных осей) эти величины накапливают от итерации 1 до итерации i (этап F41). При этом, принимая, что гирометрические и акселерометрические данные представлены для трех осей, для каждой итерации создают двенадцать различных совокупностей, то есть:
- шесть совокупностей для измеренных инерциальных данных R, и
- шесть совокупностей для теоретических инерциальных данных Т1.
Таким образом, для каждого инерциального данного (гирометрического и акселерометрического) и для каждой оси получают кривую совокупностей по всем итерациям (этап F41).
Далее путем сравнения (этап F42) для каждого инерциального данного и для каждой оси расхождения полученных кривых совокупностей для Т1 и для R по отношению к границам допусков можно идентифицировать, какое или какие инерциальные данные и какой или какие каналы измерений инерциального блока 3 являются дефектными.
Так, если для конкретного инерциального данного и для конкретной оси получают выход кривых полученных для Т1 и для R совокупностей за пределы границ допусков для этого инерциального данного и для этой оси, считают, что эта конкретная ось для этого конкретного инерциального данного инерциального блока 3 является дефектной (этап F43).
Для каждой оси и/или для каждого инерциального данного могут быть предусмотрены различные границы допусков.
Как и этап проверки правильности, диагностика может быть проведена для всех или для части измеренных инерциальных данных и теоретических инерциальных данных, то есть оцениваемые совокупности могут относиться только к определенным компонентам или к ограниченному окну итераций.
Фаза параметризации
Как уже было описано, в ходе фазы параметризации оцениваются несколько параметров, используемых в ходе процесса проверки функционирования, а именно:
- угловые расхождения αR, αT и αL, учитываемые компенсационными средствами С2 в ходе этапа Е50 для компенсации угловых расхождений, имеющихся между осями имитатора 2 движений и осями, соответствующими земной системе координат;
- опережение т по фазе, вводимое средствами С2 компьютера 4, и
- набор эталонных траекторий, используемый в ходе фазы проверки правильности функционирования инерциального блока 3.
Эта фаза параметризации проводится перед процессом проверки функционирования по изобретению.
Для проверки угловых расхождений αR, αT и αL в ходе фазы параметризации проводят следующие последовательные операции.
1) Вначале механический эталон Ref1 устанавливают на трехосном столе 21. С помощью этого механического эталона Ref1 инструментарий O1, предназначенный для идентификации угловых расхождений αR, αT и αL, известным, точным и повторяемым образом устанавливают на трехосном столе 21. Этот инструментарий O1 содержит два уровня точности, настраиваемых относительно эталона Ref1 в соответствии с конструкцией инструментария O1. Эти два уровня предназначены один для идентификации углового расхождения αR (расхождение по крену) и другой для идентификации углового расхождения αT (расхождение по тангажу). Кроме того, инструментарий O1 имеет другой эталон Ref2, используемый для выполнения наводки для идентификации углового расхождения αL (расхождения по рысканью).
2) Исходя из нормального положения трехосного стола 21 (то есть положения, которое трехосный стол 21 занимает естественным образом, когда он не находится под действием конкретной числовой команды), с помощью блока 22 числового управления методом последовательных приближений компенсируют угловые расхождения, выявленные двумя уровнями точности, до получения одновременно для двух уровней точности измерения, наиболее близких к горизонтали. При этом посредством непосредственного чтения на экране блока 22 числового управления трехосным столом 21 получают величины расхождения αR по крену и расхождения αТ по тангажу.
3) Для идентификации величины расхождения αL по рысканью можно использовать определитель севера, связанный с теодолитом. После нахождения географического севера производят наводку теодолита на эталон Ref2 инструментария O1. Затем путем последовательных приближений наводят визир теодолита на эталон Ref2 с помощью, с одной стороны, блока 22 числового управления и, с другой стороны, теодолита. Когда представляется, что наведение достигнуто (или, по меньшей мере, достигнуто наилучшее возможное наведение), получают величину расхождения αL по рысканью путем суммирования смещения, введенного в числовое управление столом 21 на оси рысканья (величина которого может быть считана с экрана блока 22 числового управления), и смещения, произведенного для перемещения визира теодолита от положения, характеризующего географический север, до положения наилучшего наведения визира на эталон Ref2.
Кроме того, в ходе итераций также используют второй инструментарий O2, индексированный с помощью эталона Ref1, для того чтобы известным, точным и повторяемым образом устанавливать инерциальный блок 3 по отношению к осям имитатора 2 движений.
Благодаря этим различным операциям и вводу в ходе этапа Е50 угловых расхождений αR, αT и αL в числовые команды А обеспечивают хорошее согласование осей имитатора 2 движений с осями земной системы координат (местной вертикали с географическим севером) и точное знание положения осей отсчета инерциального блока 3. Эталон Ref1, конструкция инструментария O2 и внутренние операции по позиционированию имитатора движений обеспечивают повторяемость позиционирования в пространстве.
Для определения опережения τ по фазе, которое должно вводиться компенсационными средствами С2, принимают в расчет промежутки времени, необходимые для получения, с одной стороны, измеренных инерциальных данных R и, с другой стороны, теоретических инерциальных данных Т1. Так, например, исходя из предпосылок, что:
- ввод/вывод данных в каждый блок системы 1 проверки функционирования производится один раз в период часового времени (обозначенный Те);
- этап Е80 выдачи имитатором движений кинематических данных D и этап Е70 выдачи измеренных инерциальных данных R инерциальным блоком 3 синхронны;
- ϑe обозначает задержку при передаче измеренных инерциальных данных R бортовому вычислительному устройству 5 движущегося объекта (то есть задержку, соответствующую промедлению между выполнением измерений инерциальным блоком 3 и их передачей на бортовое вычислительное устройство 5 движущегося объекта);
- ϑp обозначает задержку при получении кинематических данных D, реально выполняемых имитатором 2 движений (то есть задержку, соответствующую промедлению между получением кинематических данных D и их предоставлением в распоряжение теоретической модели М1); и
- часовой период Те времени необходим для предоставления в распоряжение бортового вычислительного устройства 5 теоретических инерциальных данных Т1, вычисленных теоретической моделью М1, включая опережение по фазе (этапы Е90-Е110);
При этом опережение τ по фазе должно вводиться средствами С2, определяется уравнением
τ=Те+ϑе-ϑр.
Для определения набора эталонных траекторий, используемых в ходе фазы проверки правильности функционирования инерциального блока 3, известным образом используют полностью числовой имитатор, позволяющий прогнать траекторию движущегося объекта в реальной навигационной обстановке с учетом различных допусков инерциального блока 3 (эти различные допуски, такие как расхождения, масштабные коэффициенты, дисбалансы, обычно указываются конструктором инерциального блока для его различных характеристик).
Для этой цели такой числовой имитатор содержит моделирование всего реального оборудования движущегося объекта (в частности, бортового вычислительного устройства, инерциального блока), а также их окружения. В целях упрощения речь может идти об имитаторе М2, который используется в ходе процесса проверки функционирования по изобретению и в котором моделировано бортовое вычислительное устройство.
Для определения набора траекторий с помощью числового имитатора выполняют прогон множества траекторий, модулируя различные характеристики инерциального блока в пределах их соответствующих допусков за исключением обработки вклада акселерометра, связанного с линейными перемещениями, для которого характеристики инерциального блока оставляют в номинальных величинах с тем, чтобы они согласовались с реализацией при комбинированном моделировании. Полученная таким образом совокупность траекторий образует набор эталонных траекторий.
Фаза инициализации
Как уже было описано, выполняемое системой 1 проверки функционирования комбинированное моделирование может также содержать перед фазой управления фазу инициализации, в ходе которой движущийся объект не управляется бортовым вычислительным устройством 5. Другими словами, бортовое вычислительное устройство 5 генерирует команды Р управления, но они не принимаются в расчет для управления движущимся объектом.
Эта фаза инициализации может начинать свое действие с момента активизации элементов системы 1 проверки функционирования (то есть при запуске комбинированного моделирования) и продолжаться до тех пор, пока не будет достигнут комплекс необходимых условий для входа движущегося объекта в фазу управления. Такие условия могут быть предварительно определены и могут состоять, например, в том, чтобы скорость движущегося объекта превышала определенный порог, и т.д.
Сходным образом с фазой управления фаза инициализации содержит множество итераций, выполняемых элементами системы 1 проверки функционирования в реальном времени и без обратной связи. Процесс каждой итерации представлен на фиг.3В.
Выполняемые в ходе фазы инициализации итерации отличаются от итераций фазы управления тем, что команды Р управления, генерируемые бортовым вычислительным устройством 5, не посылаются на имитационный инструмент М2 (поэтому на фиг.1 стрелка, указывающая отправку команд управления к имитационному инструменту М2, показана штриховой линией).
Вследствие этого в ходе этапа Е20' во время фазы инициализации имитационный инструмент М2 генерирует точку X' траектории движущегося объекта, имитационные инерциальные данные Т2 и кинематические команды А без использования команд управления, генерируемых вычислительным устройством 5 движущегося объекта, а в зависимости от каких-либо моделируемых движений движущегося объекта на его пусковой площадке или во время автономного перемещения.
Этапы Е30-Е130, выполняемые в ходе фазы инициализации, подобны этапам Е30-Е130, описанным выше со ссылкой на фиг.3А применительно к фазе управления.
В частности, в ходе этапа Е130 бортовое вычислительное устройство 5 движущегося объекта учитывает инерциальные данные I=T2+R-T1 для установления местоположения и подготовки к направлению движущегося объекта и управлению им.
Используемые в фазе инициализации параметры (а именно угловые расхождения αR, αT и αL и опережение τ по фазе) аналогичны используемым в фазе управления и устанавливаются в ходе фазы параметризации.
В случае выполнения фазы инициализации в качестве расчетной траектории движущегося объекта считается траектория, образованная, с одной стороны, точками X', определенными в ходе фазы инициализации, и, с другой стороны, точками X, определенными в ходе фазы управления. Очевидно, что эталонные траектории, рассматриваемые в фазе проверки правильности функционирования, отражают эти две фазы. Оценка инерциального блока и диагностика могут производиться по всей траектории или по ее части (например, по части траектории, соответствующей только фазе управления, или по «полной» траектории, образованной в ходе двух фаз, и т.д.).
Второй пример осуществления изобретения
Далее со ссылкой на фиг.5 будет описан второй пример осуществления изобретения. Здесь система 1' проверки функционирования дополнительно содержит средства 43 ввода опережения φ по фазе для кинематических команд А, генерируемых имитатором М2, перед их выдачей на имитатор 2 движений. Здесь эти средства 43 включены в компьютер 4.
Другие элементы системы 1' проверки функционирования и их действие подобны описанным для системы 1 в первом примере осуществления и обозначены теми же позициями (см. фиг.1, 2, 3А, 3В и 4).
Опережение φ по фазе для кинематических команд А применяется средствами 43 при каждой итерации с помощью соответствующего не описываемого здесь алгоритма (например, с помощью алгоритма, используемого для описанных выше компенсационных средств С2). Этот алгоритм не должен вводить искажения в амплитуды кинематических команд, то есть должен обеспечивать согласованность амплитуд кинематических команд А и кинематических данных D. Это опережение φ по фазе стремится компенсировать запаздывание, характерное для имитатора 2 движений. Предпочтительно оно выбирается для кинематических команд А, выдаваемых имитационным инструментом М2, имеющим параметры, синхронные параметрам кинематических данных D.
Таким образом, имитация инерциального блока 3 будет синхронизирована с угловым движением движущегося объекта, обеспечивая репрезентативность действия инерциального блока 3 и других датчиков, одновременно находящихся на имитаторе 2 движений.
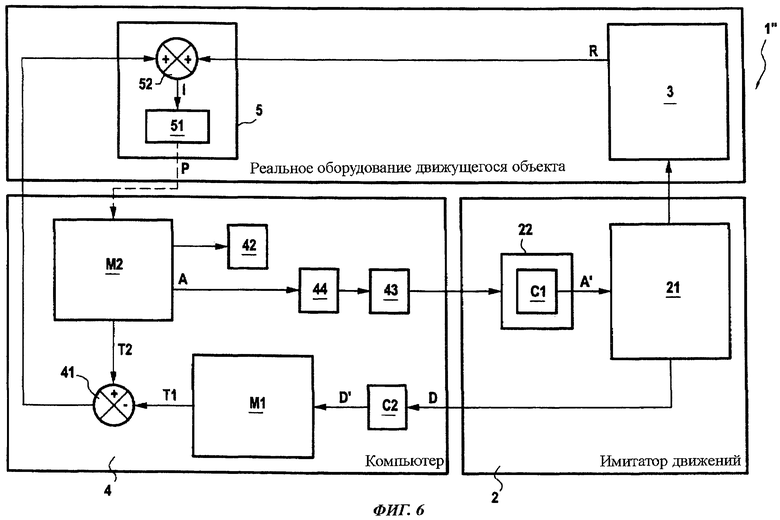
Третий пример осуществления изобретения
Далее со ссылкой на фиг.6 будет описан третий пример осуществления изобретения. Здесь система 1'' проверки функционирования дополнительно содержит маскировочные средства 44, которые в данном примере расположены за имитационным инструментом М2 и перед средствами 43 ввода опережения по фазе.
Другие элементы системы 1'' проверки функционирования и их действие подобны описанным для систем 1 и 1' в первом и втором примерах осуществления и обозначены теми же позициями (см. фиг.1, 2, 3А, 3В, 4 и 5).
Таким образом, маскировочные средства 44 получают в реальном времени кинематические команды А от имитационного инструмента М2 и выдают на средства 43 маскированные команды для маскирования, по меньшей мере, части фаз движения движущегося объекта.
При этом средства 43 ввода опережения по фазе выдают на имитатор 2 движений кинематические команды, которые учитывают маскированные кинематические команды для осуществления траектории, для которой диапазон угловых перемещений движущегося объекта больше того, которое предусмотрено имитатором 2 движений.
Таким образом, угловое перемещение имитатора 2 движений или остановка этого перемещения, умышленно управляемые со стороны маскировочных средств 44, учитывается измеренными инерциальными данными R и теоретическими инерциальными данными Т1, но не влияет на команды Р управления. И действительно, в соответствии с формулой I=T2-T1+R на инерциальные данные I не оказывает воздействия какое-либо угловое перемещение или остановка имитатора 2 движений, управляемая маскировочными средствами 44.
Кроме того, контроль, осуществляемый в маскировочных средствах 44, позволяет ограничивать управление угловым ходом до достижения физических или программных ограничителей имитатора 2 движений.
Следует отметить, что теоретическая модель М1, имитатор М2, средства 43 ввода опережения по фазе и маскировочные средства 44 могут содержаться в компьютере по фиг.6.
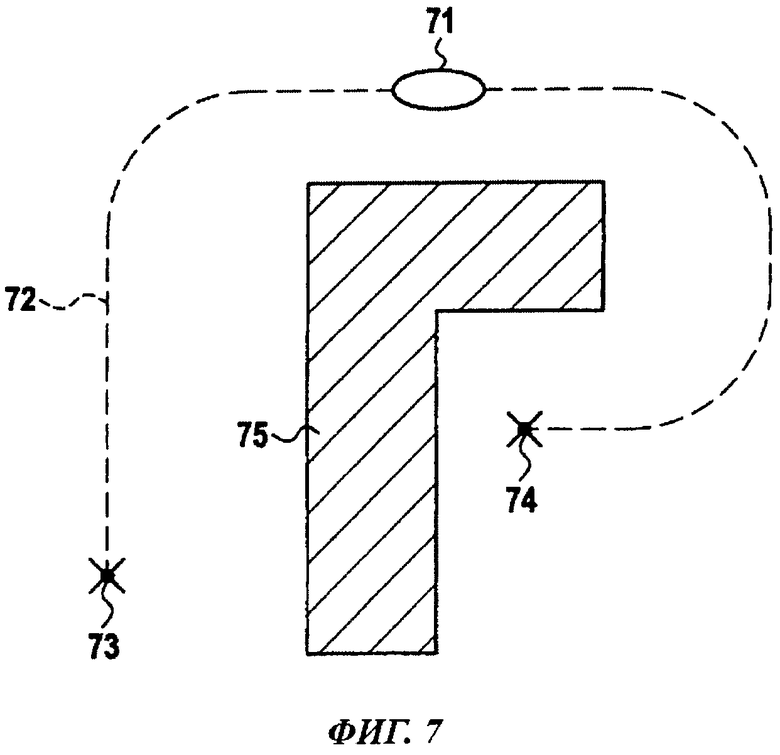
Для иллюстрации применения системы 1'' проверки функционирования рассмотрим со ссылкой на фиг.7 траекторию движущегося объекта вокруг препятствия.
При использовании имитатора 2 движений с недостаточными возможностями, обладающего способностью углового перемещения вокруг оси рысканья от +100° до -100° (что соответствует угловому ходу в 200°) можно совершить проход по траектории с угловым ходом в 270°. Так, согласно данному примеру, движущийся объект 71 может пройти по траектории от исходной точки 73 до точки 74 назначения в обход препятствия 75 с угловым ходом в 270°
В ходе следования по траектории 72 можно модифицировать угловое положение имитатора 2 движений. Например, можно управлять положением оси A3 рысканья имитатора 2 движений независимо от рысканья движущегося объекта 71.
Предпочтительно, по меньшей мере, часть маскированных кинематических команд может зависеть от внутренней закономерности маскировочных средств 44. В частности, внутренняя закономерность не зависит от кинематических команд А. При этом в имитатор 2 движений можно ввести команду на движение от маскировочных средств 44, не зависящую от кинематических команд А от имитационного инструмента М2. Это позволяет следовать по траектории, в которой движущийся объект 71 может совершать несколько петлевых движений при использовании имитатора 2 движений с ограниченным диапазоном углового хода.
Кроме того, траектория может иметь динамический диапазон больше предусмотренной имитатором 2 движений.
В качестве примера в том случае, когда для временного перехода кинематические команды А содержат команду скорости, превышающую команду скорости, которую может генерировать имитатор 2 движений, кинематические данные D, реально выполняемые имитатором 2 движений, меньше по отношению к кинематическим командам А. При этом такое измененное движение учитывается измеренными инерциальными данными R и теоретическими инерциальными данными Т1. Несмотря на это в силу, например, формулы I=T2-T1+R, инерциальные данные I не испытывают влияния от изменения движения. Таким образом, на траекторию не оказывает воздействия недостаточность возможностей имитатора 2 движений.
Изобретением предусмотрена также компьютерная программа, которая может загружаться от коммуникационной сети и содержит командные коды для выполнения этапов системой проверки функционирования по изобретению, когда они выполняются на компьютере 4. Эта программа для компьютера 4 может быть записана на машиночитаемом носителе и может выполняться микропроцессором.
В этой программе может быть использован любой язык программирования, и она может принимать вид исходного кода, объектного кода или кода, промежуточного между исходным кодом и объектным кодом, например, быть в частично скомпилированном виде или в любом другом виде.
Изобретением предусмотрен также носитель информации в машиночитаемой форме, содержащий инструкции по компьютерной программе, упомянутые выше.
Носителем информации может быть любое устройство, способное хранить программу. Так, например, этот носитель может содержать средства хранения, такие как ПЗУ, или компакт-диск без возможности перезаписи, или ПЗУ на микросхемах, или магнитные записывающие средства, например дискета или жесткий диск.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННОЙ ПЛАТФОРМОЙ ПОДВИЖНОГО ОБЪЕКТА | 2007 |
|
RU2442962C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ ТРАЕКТОРИИ ДВИЖУЩЕГОСЯ ТЕЛА | 2010 |
|
RU2530705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| Способ имитационного статистического моделирования локомотивной интегрированной системы навигации | 2017 |
|
RU2658509C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| Комплекс полунатурного моделирования движения авиационного средства поражения | 2021 |
|
RU2767712C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| Бесплатформенная инерциальная навигационная система подвижного объекта | 2017 |
|
RU2676941C1 |
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
Изобретение относится к измерительной технике и может быть использовано в системах управления подвижными объектами. Технический результат - повышение точности. Для достижения данного результата осуществляют моделирование комбинированного типа, позволяющее проверять функционирование инерциального блока движущегося объекта, установленного на имитаторе угловых движений, путем сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной эталонной траекторией. При этом, по меньшей мере, один этап компенсации, по меньшей мере, одной погрешности, выполняют перед этапом теоретического моделирования и этапом определения управляющих команд на основе имитационных инерциальных данных, теоретических инерциальных данных и измеренных инерциальных данных. 2 н. и 19 з.п. ф-лы, 6 ил.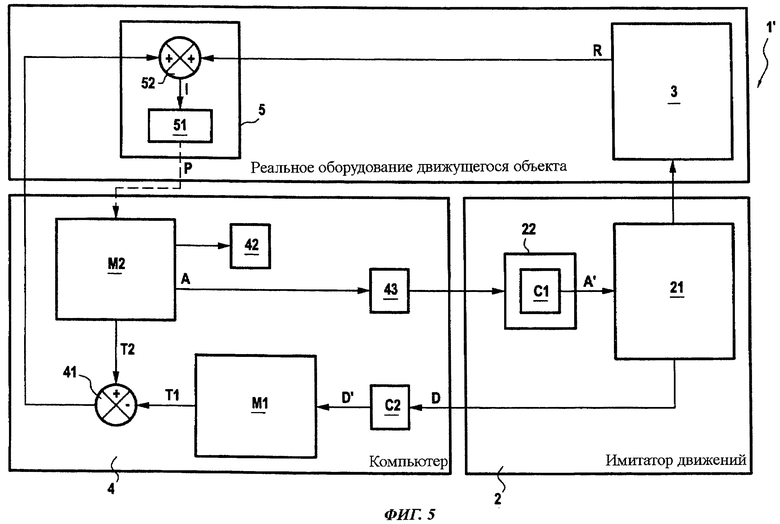
1. Способ проверки функционирования инерциального блока (3) движущегося объекта, установленного на имитаторе (2) угловых движений, причем указанный имитатор движений находится в точке с фиксированными координатами земной системы координат, а проверку правильности функционирования (F10) выполняют путем сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной эталонной траекторией, при этом для получения расчетной траектории способ содержит фазу управления движущимся объектом, содержащую множество итераций, каждая из которых включает:
- этап (Е20) получения данных с помощью имитационного инструмента (М2), на котором моделируют инерциальный блок в реальной навигационной обстановке, подавая управляющие команды (Р), вычисленные при предыдущей итерации, для получения:
- точки (X) расчетной траектории движущегося объекта,
- имитационных инерциальных данных (Т2), представляющих инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
- кинематических команд (А), представляющих движение, подлежащее выполнению имитатором движений,
- этап (Е70), на котором посредством инерциального блока (3) выдают измеренные инерциальные данные (R), представляющие движение после его выполнения имитатором (2) движений;
- этап (E100) теоретического моделирования, на котором выполняют теоретическое моделирование измеренных инерциальных данных, выдаваемых инерциальным блоком, на основе кинематических данных (D'), реально выполненных имитатором движений для данного движения, причем этот этап теоретического моделирования обеспечивает выдачу теоретических инерциальных данных (Т1);
- по меньшей мере, один этап (Е50, Е90) компенсации, на котором выполняют компенсацию, по меньшей мере, одной погрешности, способной сделать ложным теоретическое моделирование этих измеренных инерциальных данных под действием указанных теоретических инерциальных данных, причем этот, по меньшей мере, один этап (Е50, Е90) компенсации выполняют перед этапом (Е100) теоретического моделирования; и
- этап (Е130) вычисления, на котором вычисляют управляющие команды (Р) на основе имитационных инерциальных данных (Т2), теоретических инерциальных данных (Т1) и измеренных инерциальных данных (R).
2. Способ по п.1, отличающийся тем, что каждую итерацию выполняют в реальном времени с тактовой частотой, определяемой тактовой частотой движущегося объекта.
3. Способ по п.1, отличающийся тем, что, по меньшей мере, одни этап компенсации, по меньшей мере, одной погрешности содержит калибровку (Е50), по меньшей мере, одной из кинематических команд (А) для компенсации угловых расхождений, имеющихся между осями имитатора (2) движений и соответствующими осями земной системы координат.
4. Способ по п.1, отличающийся тем, что, по меньшей мере, один этап компенсации, по меньшей мере, одной погрешности содержит ввод (Е90) опережения по фазе, по меньшей мере, некоторых кинематических данных (D), реально выполняемых имитатором (2) движений, перед их вводом на этап (Е100) теоретического моделирования для синхронизации теоретических инерциальных данных (Т1) с измеренными инерциальными данными (R).
5. Способ по п.1, отличающийся тем, что управляющие команды (Р) вычисляют в зависимости от инерциальных данных I, определяемых как I=T2+R-T1, где Т2, R и Т1 обозначают соответственно имитационные инерциальные данные, измеренные инерциальные данные и теоретические инерциальные данные.
6. Способ по п.5, отличающийся тем, что когда инерциальный блок (3) признают неадекватным (F30) в результате проверки правильности функционирования (F10), способ дополнительно содержит этап (F40) диагностики, выполняемый путем сравнения совокупностей, образованных на основе измеренных инерциальных данных (R), полученных при каждой итерации для данной траектории движущегося объекта, с совокупностями, образованными на основе теоретических инерциальных данных (Т1), полученных при каждой итерации для данной траектории движущегося объекта.
7. Способ по п.1, отличающийся тем, что дополнительно содержит в ходе каждой итерации этап ввода опережения по фазе кинематических команд (А) перед их выдачей имитатору (2) движений для компенсации задержки выполнения, свойственной имитатору (2) движений.
8. Способ по п.7, отличающийся тем, что кинематические команды (А) имеют параметры, синхронные параметрам реально выполняемых кинематических данных (D), а амплитуды этих реально выполняемых кинематических данных (D) и кинематических команд (А) согласованы.
9. Способ по п.8, отличающийся тем, что дополнительно содержит при каждой итерации этап маскирования после этапа (Е20) получения данных и перед этапом ввода опережения по фазе в кинематические команды (А), так что этот этап маскирования получает кинематические команды (А) и выдает маскированные кинематические команды на этап ввода опережения по фазе в кинематические команды для маскирования, по меньшей мере, части фаз движения.
10. Способ по п.9, отличающийся тем, что, по меньшей мере, часть маскированных кинематических команд зависит от внутренней закономерности этапа маскирования, которая не зависит от кинематических команд.
11. Способ по любому из пп.1-10, отличающийся тем, что дополнительно содержит фазу инициализации, содержащую множество итераций, причем каждая итерация фазы инициализации содержит:
- этап (Е20') получения данных с помощью имитационного инструмента (М2), на котором получают:
- точки (X) расчетной траектории движущегося объекта,
- имитационные инерциальные данные (Т2), представляющие инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
- кинематические команды (А), представляющие движение, подлежащее выполнению имитатором движений,
- а также этап (Е70) выдачи измеренных инерциальных данных, этап (Е100) теоретического моделирования, этап (Е50, Е90) компенсации, этап (Е130) вычисления фазы управления процесса проверки функционирования.
12. Система (1, 1', 1'') проверки функционирования инерциального блока (3) движущегося объекта, установленного на имитаторе (2) угловых движений, причем указанный имитатор движений находится в точке с фиксированными координатами земной системы координат, а для проверки правильности функционирования инерциального блока система содержит средства (42) сравнения расчетной траектории движущегося объекта в реальной навигационной обстановке, по меньшей мере, с одной эталонной траекторией, при этом для получения расчетной траектории система дополнительно содержит следующие средства, реализующие каждую итерацию фазы управления движущимся объектом, содержащей множество итераций:
- имитационный инструмент (М2), моделирующий инерциальный блок в реальной навигационной обстановке, на который подаются управляющие команды (Р), вычисленные при предыдущей итерации, при этом имитационный инструмент содержит средства для получения:
- точки (X) расчетной траектории движущегося объекта,
- имитационных инерциальных данных (Т2), представляющих инерциальные данные, которые инерциальный блок выдавал бы в такой реальной навигационной обстановке, и
- кинематических команд (А), представляющих движение, подлежащее выполнению имитатором (2) движений,
- средства для получения выдаваемых инерциальным блоком измеренных инерциальных данных, представляющих движение после его выполнения имитатором (2) движений;
- средства (M1) теоретического моделирования для теоретического моделирования измеренных инерциальных данных, выдаваемых инерциальным блоком, на основе кинематических данных (D'), реально выполненных имитатором (2) движений для данного движения, причем эти средства теоретического моделирования обеспечивают выдачу теоретических инерциальных данных (Т1);
- компенсационные средства (C1, С2) для компенсации, по меньшей мере, одной погрешности, способной сделать ложным теоретическое моделирование этих измеренных инерциальных данных (R) под действием указанных теоретических инерциальных данных (Т1), причем эти компенсационные средства (C1, С2) используются перед средствами (M1) теоретического моделирования; и
- средства (5) вычисления для вычисления управляющих команд на основе имитационных инерциальных данных (Т2), теоретических инерциальных данных (Т1) и измеренных инерциальных данных (R).
13. Система по п.12, отличающаяся тем, что имитационный инструмент (М2), инерциальный блок (3), средства (M1) теоретического моделирования, компенсационные средства (C1, С2) и средства (5) вычисления функционируют в реальном времени с тактовой частотой, определяемой тактовой частотой движущегося объекта.
14. Система по п.12, отличающаяся тем, что компенсационные средства содержат калибровочные средства (С1) для калибровки, по меньшей мере, одной из кинематических команд (А) для того, чтобы компенсировать угловые расхождения, имеющиеся между осями имитатора (2) движений и соответствующими осями земной системы координат.
15. Система по п.12, отличающаяся тем, что компенсационные средства содержат средства (С2) ввода опережения по фазе, по меньшей мере, некоторых кинематических данных (D), реально выполняемых имитатором (2) движений, перед их выдачей средствам (M1) теоретического моделирования для синхронизации теоретических инерциальных данных (Т1) с измеренными инерциальными данными (R).
16. Система по п.12, отличающаяся тем, что средства (5) вычисления вычисляют управляющие команды (Р) в зависимости от инерциальных данных I, определяемых как I=T2+R-T1, где Т2, R и Т1 обозначают соответственно имитационные инерциальные данные, измеренные инерциальные данные и теоретические инерциальные данные.
17. Система по п.16, отличающаяся тем, что содержит средства (42) диагностики, которые, когда инерциальный блок (3) признается неадекватным системой (1, 1', 1'') проверки функционирования, сравнивают совокупности, образованные на основе измеренных инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта, с совокупностями, образованными на основе теоретических инерциальных данных, полученных при каждой итерации для данной траектории движущегося объекта.
18. Система по любому из пп.12-17, отличающаяся тем, что дополнительно содержит средства (43) для ввода опережения по фазе кинематических команд (А) перед их выдачей имитатору (2) движений для компенсации задержки выполнения, свойственной имитатору (2) движений.
19. Система по п.18, отличающаяся тем, что кинематические команды (А) имеют параметры, синхронные параметрам реально выполняемых кинематических данных (D), а амплитуды этих реально выполняемых кинематических данных (D) и кинематических команд (А) согласованы.
20. Система по п.19, отличающаяся тем, что дополнительно содержит после выхода имитационного инструмента и перед входом средств (43) ввода опережения по фазе в кинематические команды маскировочные средства (44), которые получают кинематические команды (А) и выполнены с возможностью выдачи маскированных кинематических команд средствам (43) ввода опережения по фазе в кинематические команды (А) для маскирования, по меньшей мере, части фаз движения.
21. Система по п.20, отличающаяся тем, что, по меньшей мере, часть маскированных кинематических команд зависит от внутренней закономерности этапа маскирования, которая не зависит от кинематических команд (А).
| WILSON V | |||
| ЕТ AL: UNSTEADY RANS METHOD FOR SHIP MOTIONS WITH APPLICATION TO ROLL FOR A SURFACE COMBATANT/ COMPUTERS AND FLUIDS, PERFMON PRESS, NEW YORK, NY, GB, VOL | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| LI D | |||
| ET AL: MODELING, SIMULATION, AND CONTROL OF A HYDRAULIC STEWART PLATFORM/ PROCEEDINGS - IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND | |||

