Изобретение относится к области систем автоматического управления нестационарными объектами, а именно к системе управления самолетом по углу тангажа.
Известна система автоматического управления самолетом по углу тангажа, содержащая последовательно соединенные задатчик угла тангажа, первый сумматор, первый усилитель, второй сумматор, интегратор, объект управления (самолет) и датчик угла, выход которого соединен со вторым входом первого сумматора, выход объекта управления через последовательно соединенные датчик угловой скорости, дифференциатор, второй усилитель и третий сумматор соединен со вторым входом второго сумматора, а выход датчика угловой скорости через третий усилитель подключен ко второму входу третьего сумматора, (прототип) [1].
К недостаткам известного технического решения задачи относится то, что в системе происходит сокращение нуля объекта управления, что приводит к неуправляемости и ненаблюдаемости объекта управления [2], а так же то, что при изменении параметров объекта управления изменяется и вид переходного процесса на выходе системы управления, кроме того, сокращение нуля передаточной функции объекта управления не позволяет использовать положительное действие нуля на вид переходного процесса, которое обеспечивается только при частичной компенсации нуля с повышением быстродействия и времени переходных процессов в системе.
С целью исключения вышеперечисленных недостатков система содержит датчик параметра, задатчик параметра, блок умножения и четвертый сумматор, выход интегратора через блок умножения соединен с третьим входом сумматора, выход датчика параметра через четвертый сумматор подключен ко второму входу блока умножения, а выход задатчика параметра соединен со вторым входом четвертого сумматора.
На чертеже представлена система автоматического управления самолетом по углу тангажа, где приняты следующие обозначения:
1 - задатчик угла тангажа,
2, 3, 4, 5 - соответственно первый, второй, третий и четвертый сумматоры,
6, 7 - соответственно первый и третий усилители,
8 - интегратор,
9 - объект управления (самолет),
10 - блок умножения,
11 - датчик параметра,
12 - задатчик параметра,
13 - датчик угловой скорости,
14 - датчик угла (тангажа),
15 - дифференциатор,
16 - второй усилитель,
V(t) - угол тангажа
V3(t) - сигнал задания угла тангажа
U(t) - сигнал управления
Uo(t) - сигнал на выходе первого усилителя
Разность сигналов V3 и V после усиления первым усилителем 6 проходит через второй сумматор 3 и интегратор 8 и поступает в качестве сигнала управления U(t) на вход объекта управления 9. С датчика угловой скорости 13 сигнал поступает через дифференциатор 15 и второй усилитель 7 соответственно на первый и второй входы третьего сумматора 4, на выходе которого формируется сигнал обратной связи по скорости тангажа  и ускорению
и ускорению  в виде их суммы. Результирующий сигнал с выхода третьего сумматора 4 поступает на второй вход второго сумматора 3, на выходе которого получается сигнал алгебраической суммы сигнала U0(t), сигнала с выхода третьего сумматора 4 и сигнала с выхода блока умножения 10.
в виде их суммы. Результирующий сигнал с выхода третьего сумматора 4 поступает на второй вход второго сумматора 3, на выходе которого получается сигнал алгебраической суммы сигнала U0(t), сигнала с выхода третьего сумматора 4 и сигнала с выхода блока умножения 10.
Передаточная функция объекта управления 9 (самолета) по скорости изменения угла тангажа W0(p) имеет вид [1]
 ,
,
где p - оператор Лапласа, c1, c2, nB - квазистационарные коэффициенты (скорость их изменения во времени приблизительно равна нулю). А фильтр с переменным параметром  образован вторым сумматором 3, интегратором 8, блоком умножения 10, четвертым сумматором 5, датчиком параметра nB·n22 11 и задатчиком параметра
образован вторым сумматором 3, интегратором 8, блоком умножения 10, четвертым сумматором 5, датчиком параметра nB·n22 11 и задатчиком параметра  12, что позволяет обеспечить желаемый нуль системы управления λ [3].
12, что позволяет обеспечить желаемый нуль системы управления λ [3].
Согласно [3] при заданном  и положении нуля системы, равном желаемому значению λ=const, можем записать
и положении нуля системы, равном желаемому значению λ=const, можем записать
 ,
,
где  ,
,  - значения коэффициентов корректирующего динамического звена с передаточной функцией Wк(p)
- значения коэффициентов корректирующего динамического звена с передаточной функцией Wк(p)
 ,
,
Который реализуется в виде соединения второго сумматора 3, блока умножения 10 и интегратора 8 с передаточной функцией Wu(p)
 .
.
При этом nB, n22 - измеряемые параметры,  - задается, а
- задается, а  рассчитывается по формуле
рассчитывается по формуле
 .
.
Параметр  обеспечит желаемый нуль системы, а это значит, и желаемый переходный процесс.
обеспечит желаемый нуль системы, а это значит, и желаемый переходный процесс.
В процессе полета самолета коэффициенты (параметры) передаточной функции W0(p) самолета c1, c2, n22 и nB определяются по известным зависимостям как функции скорости полета и высоты [1]. Для обеспечения заданных желаемых характеристик полета самолета по каналу тангажа коэффициенты усиления первого, третьего и второго усилителей 6, 7 и 16 соответственно подстраивают (на чертеже не показано), чтобы изменить положение полюсов системы управления и обеспечить устойчивость и желаемое качество переходных процессов. Это приводит к компенсации влияния изменения коэффициентов c1, c2 и nB передаточной функции Wo(p) на вид переходных процессов в системе управления самолетом путем изменения положения полюсов системы на плоскости корней [2, 3].
Таким образом, на положение нулей можно в системе влиять, что дает системе дополнительные возможности по улучшению характеристик переходных процессов - по повышению быстродействия системы управления.
Целенаправленное изменение положения нуля в системе обеспечивается путем указанного на чертеже соединения второго сумматора 3, интегратора 8, блока умножения 10, четвертого сумматора 5, датчика параметра 11 и задатчика параметра 12.
Таким образом, технический эффект от использования системы управления заключается в улучшении качества переходного процесса, повышении быстродействия и времени переходного процесса. Достигается это путем регулирования положения нуля системы на плоскости корней (а не уничтожения нуля объекта управления).
Изобретательский уровень предложенного технического решения подтверждается отличительной частью формулы изобретения.
Источники информации
1. Боднер В.А, Теория автоматического управления полетом. - М.: Наука, 1964, с.85 (прототип).
2. Петров Б.Н., Рутковский В.Ю., Земляков С.Д., Адаптивное координатно-параметрическое управление нестационарными объектами. - М.: Наука, 1980.
3. Лащев А.Я. Синтез модального управления. Материалы докладов 9 всероссийской НТК "Повышение эффективности средств обработки информации на базе математического моделирования", ч.2 - Тамбов. 2009. с.288-294.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
Изобретение относится к области систем автоматического управления минимально-фазовыми объектами, в частности систем управления самолетом по углу тангажа. Система содержит последовательно соединенные задатчик угла тангажа, первый сумматор, первый усилитель, второй сумматор, интегратор и датчик угла, датчик параметра, задатчик параметра, блок умножения и четвертый сумматор. Выход датчика угла соединен со вторым входом первого сумматора. Выход объекта управления через последовательно соединенные датчик угловой скорости, дифференциатор, второй усилитель и третий сумматор соединен со вторым входом второго сумматора. Выход датчика угловой скорости через третий усилитель подключен ко второму входу третьего сумматора. Выход интегратора через блок умножения соединен с третьим входом сумматора. Выход датчика параметра через четвертый сумматор подключен ко второму входу блока умножения. Выход задатчика параметра соединен со вторым входом четвертого сумматора. Достигается улучшение качества переходных процессов. 1 ил.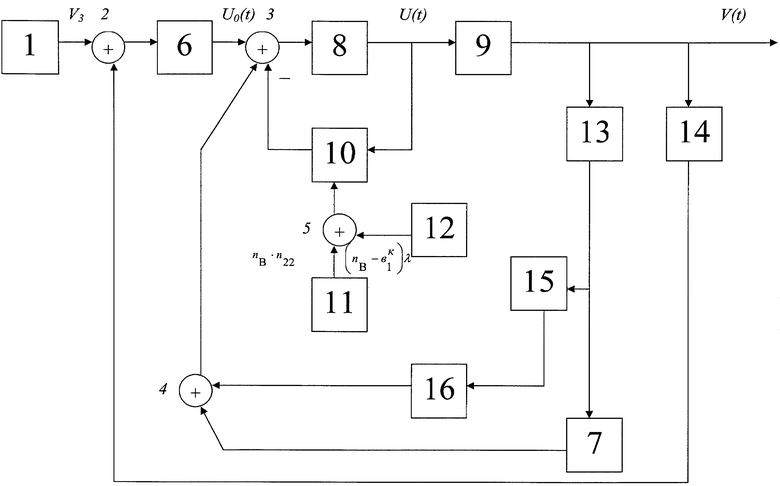
Система автоматического управления самолетом по углу тангажа, содержащая последовательно соединенные задатчик угла тангажа, первый сумматор, первый усилитель, второй сумматор, интегратор, объект управления (самолет) и датчик угла, выход которого соединен со вторым входом первого сумматора, выход объекта управления через последовательно соединненые датчик угловой скорости, дифференциатор, второй усилитель и третий сумматор соединен со вторым входом второго сумматора, а выход датчика угловой скорости через третий усилитель подключен ко второму входу третьего сумматора, отличающаяся тем, что она содержит датчик параметра, задатчик параметра, блок умножения и четвертый сумматор, выход интегратора через блок умножения соединен с третьим входом сумматора, выход датчика параметра через четвертый сумматор подключен ко второму входу блока умножения, а выход задатчика параметра соединен со вторым входом четвертого сумматора.
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973 | |||
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| Система управления углом наклона траектории самолета в продольной плоскости в режиме взлета | 1990 |
|
SU1779638A1 |
| Способ получения кислот и нейтральных оксидированных нефтяных масел | 1926 |
|
SU13019A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| US 4633404 A, 30.12.1986 | |||
| СПОСОБ РАЗБРАКОВКИ КМОП МИКРОСХЕМ, ИЗГОТОВЛЕННЫХ НА КНД СТРУКТУРАХ, ПО РАДИАЦИОННОЙ СТОЙКОСТИ | 2010 |
|
RU2444742C1 |

