Изобретение относится к области космонавтики, а именно к оцениванию помехозащищенности сложных космических комплексов управления ИСЗ, к которым относится, в частности, навигационный контур ИСЗ.
Из уровня техники известно множество способов оценивания помехозащищенности (помехоустойчивости):
- радиоприемника (см. Л1);
- радиолинии (радиоканала), входящей (его) в систему управления (см. Л2);
- системы радиосвязи (см. Л5);
- радиолокационной станции (см. Л6);
- система оценивания точности определения параметров движения ИСЗ (см. патент Российской Федерации на изобретение RU 2391265 С1, опубл. 10.06.2010 - Л7).
Известные из уровня техники технические решения обладают следующими недостатками:
1. Оценивание помехозащищенности (помехоустойчивости) осуществляется отдельно взятой радиолинией (радиосистемы) или отдельно взятого радиоприемника с использованием аналитических соотношений, которые позволяют оценить вероятность полного нарушения работы радиолинии (радиосистемы) или радиоприемника.
Аналитические соотношения позволяют оценить критическую мощность радиопомехи, при которой нарушается работоспособность радиолинии, радиосистемы или радиоприемника, хотя на практике важным является результат воздействия радиопомехи на радиоприемное устройство, например, траекторией системы еще до полного подавления, так как в данном случае интерес представляют погрешности траекторных измерений, которые появляются за счет воздействия радиопомех.
2. Не представляется возможным произвести оценку помехозащищенности сложных систем и комплексов, таких как, например, навигационный контур ИСЗ, когда необходимо оценить ухудшение точности параметров орбит за счет воздействия радиопомех на группировку наземных траекторных систем.
Заявленное изобретение направлено на устранение вышеуказанных недостатков путем получения погрешностей траекторных измерений за счет воздействия радиопомех в процессе проведения испытаний траекторией системы в условиях воздействия радиопомех, определенных моделью радиоэлектронного противодействия. При этом радиопомехи различного вида и разного уровня подают на вход радиоприемного устройства траекторией системы, получая таким образом на ее выходе траекторные измерения, возмущенные радиопомехами. Затем определяют погрешности за счет воздействия радиопомех путем вычисления разности траекторных измерений, полученных в условиях воздействия радиопомех и траекторных измерений, полученных без воздействия радиопомех. Затем определяют статистические характеристики погрешностей траекторных измерений за счет воздействия радиопомех, которые используют при моделировании процесса воздействия радиопомех на наземную группировку траекторных систем.
Навигационный контур ИСЗ представляет собой пространственно-распределенную структуру из траекторных систем с известной топологией и известными координатами фазовых центров антенн и баллистического центра, траекторные системы в соответствии с циклом траекторного контроля проводят по ИСЗ траекторные измерения, которые привязывают к шкале времени (системе единого времени - СЕВ), передают эти измерения по каналам связи в баллистический центр, где по этому объему траекторных измерений определяют параметры орбиты ИСЗ и в виде начальных условий или в виде целеуказаний передают на траекторные системы для точного наведения антенн траекторных систем на ИСЗ для проведения очередного цикла траекторного контроля.
Целью заявленного изобретения является оценивание помехозащищенности навигационного контура ИСЗ.
Техническим результатом заявленного изобретения является получение оценок точности определения параметров орбит ИСЗ на мерном интервале для любого класса ИСЗ (низкоорбитальных, среднеорбитальных и высокоорбитальных ИСЗ) в условиях воздействия радиопомех.
Технический результат заявленного изобретения достигается тем, что система оценивания помехозащищенности навигационного контура искусственного спутника Земли (ИСЗ) содержит блок исходных данных, вход которого является входом системы, блок прогнозирования параметров движения ИСЗ, блок расчета значений измеряемого параметра, блок определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех, блок определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, блок моделирования траекторных измерений без воздействия радиопомех, блок формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, блок моделирования погрешностей за счет воздействия радиопомех, блок расчета отношения мощности сигнала к мощности радиопомех и блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, при этом первый выход блока исходных данных соединен со вторым входом блока моделирования траекторных измерений без воздействия радиопомех, выход которого соединен с первыми входами блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех соответственно, второй выход блока исходных данных соединен с входом блока прогнозирования параметров движения ИСЗ и с первым, и вторым входами блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, третий выход блока исходных данных соединен с входом блока расчета значений измеряемого параметра и третьими входами блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех, блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех и блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех соответственно, четвертый выход блока исходных данных соединен с первыми входами блока моделирования погрешностей за счет воздействия радиопомех и блока расчета отношения мощности сигнала к мощности радиопомех соответственно, выход блока расчета отношения мощности сигнала к мощности радиопомех соединен со вторым входом блока моделирования погрешностей за счет воздействия радиопомех, выход которого соединен со вторым входом блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, выход которого соединен с первым входом блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, выход которого соединен со вторым входом блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, выход блока прогнозирования параметров движения ИСЗ соединен со входом блока расчета значений измеряемого параметра, первый выход которого соединен с первым входом блока моделирования траекторных измерений без воздействия радиопомех и вторым входом блока расчета отношения мощности сигнала к мощности радиопомех, а второй выход блока расчета значений измеряемого параметра соединен со вторыми входами блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех соответственно, выходы блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех соединены с первым и вторым входами соответственно блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, выход которого является выходом системы.
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежом (см. фиг.1).
На фиг.1 - представлена структурная схема заявленной системы оценивания помехозащищенности навигационного контура искусственного спутника Земли, которая содержит следующие блоки и обозначения:
1 - блок моделирования траекторных измерений без воздействия радиопомех;
2 - блок формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех;
3 - блок моделирования погрешностей за счет воздействия радиопомех;
4 - блок расчета отношения мощности сигнала к мощности радиопомех;
5 - блок исходных данных;
6 - блок прогнозирования параметров движения ИСЗ;
7 - блок расчета значений измеряемого параметра;
8 - блок определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех;
9 - блок определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех;
10 - блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех;
Блок исходных данных (5) представляет собой запоминающее устройство, куда записывается информация, используемая в блоках системы.
Для блока моделирования траекторных измерений (1) формируются и записываются погрешности траекторных измерений для моделирования:
- аппаратурные (инструментальные) погрешности измерительных средств;
- погрешности за счет среды распространения радиосигнала от ИСЗ до измерительного средства;
- погрешности временной привязки траекторных измерений;
- погрешности положения фазовых центров бортовой антенны и антенны наземного измерительного средства;
- количество составляющих погрешностей траекторных измерений (возможны и другие данные).
Каждая погрешность траекторных измерений представлена в виде систематической и случайной составляющих.
Для блока прогнозирования параметров движения ИСЗ (6) и блока расчета значений измеряемого параметра (7) формируется и записывается следующая исходная информация:
- опорные начальные условия параметров движения ИСЗ;
- мерный интервал работы измерительных средств с ИСЗ, который в зависимости от высоты ИСЗ задается в виде определенного количества мерных витков, сеансов измерений, зон радиовидимости и др.;
- каталог и координаты измерительных средств, которые используются для проведения радиоконтроля параметров орбит ИСЗ;
- каталог координат измерительных средств, которые представлены в виде широты, долготы и высоты;
- метод интегрирования;
- шаг интегрирования;
- интервал прогноза;
- темп измерений;
- угол места для антенны измерительного средства, с которого рассчитывается расчетная дальность;
- масса ИСЗ (возможны и другие данные).
Для блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9), формируется и записывается в блок исходных данных (5) следующая информация:
- опорные начальные условия параметров движения ИСЗ;
- состав уточняемых параметров;
- количество реализаций.
Для блока моделирования погрешностей за счет воздействия радиопомех (3) в блок исходных данных (5) записывают статистические характеристики погрешностей траекторных измерений для каждого вида радиопомехи и соответствующего им отношения мощности сигнала к мощности радиопомехи, которые определяют по результатам испытаний траекторией системы на помехоустойчивость. Виды радиопомех, которыми воздействуют на радиоприемник траекторией системы при проведении испытаний на помехоустойчивость, задаются моделью радиоэлектронного противодействия, которая разрабатывается для каждой космической системы.
Для блока расчета отношения мощности сигнала к мощности радиопомех (4) в блок исходных данных записывают технические характеристики бортовой и наземной аппаратуры траекторией системы, к которым относятся:
- частота радиосигнала, излучаемого бортовым радиопередатчиком - fб (МГц);
- ширина спектра радиосигнала, излучаемого бортовым радиопередатчиком - Δfб (МГц);
- мощность бортового радиопередатчика - Pб (Вт);
- коэффициент усиления бортовой передающей антенны - Gб (дБ);
- коэффициент усиления наземной антенны траекторией системы - Gз (ДБ);
- коэффициент, учитывающий ослабление радиосигнала в радиолинии «борт-Земля» ξ (дБ).
Кроме этого для блока расчета отношения мощности сигнала к мощности радиопомехи (4) записывают технические характеристики средств радиоэлектронного подавления, которые представлены в модели радиоэлектронного противодействия, к которым относятся:
- виды радиопомех (шумовая прицельная, шумовая заградительная, имитационная и др.);
- носители источников (передатчиков) радиопомех (корабль, самолет, вертолет, беспилотный летающий аппарат и др.);
- передатчики радиопомех, разбрасываемые в районе дислокации объекта подавления;
- частота радиопомехи fпх (МГц) и шумовая полоса радиопомех Δfпх (МГц);
- мощность передатчика радиопомехи Рпх, (Вт);
- коэффициенты усиления антенн передатчиков радиопомех Gпх (дБ);
- расстояние между источниками радиопомех и объектами подавления Dпх и др.
Блок исходных данных (5) имеет один вход, который является входом заявленной системы, и четыре выхода. Исходные данные для каждого блока системы в виде специального задания вводятся в блок исходных данных (5), записываются в память и затем считываются в каждый соответствующий блок отдельно через свой соответствующий выход.
Блок прогнозирования параметров движения ИСЗ (6) представляет собой вычислительное устройство, которое по исходным данным (исходной информации) с использованием системы уравнений движения ИСЗ, записанной в виде векторного уравнения, осуществляет расчет прогнозируемых параметров ИСЗ. Векторное уравнение представляет собой модель движения центра масс ИСЗ вокруг некоторого небесного тела, называемого основным. Построение модели движения центра масс ИСЗ базируется на составление системы объективных дифференциальных уравнений. Задача решается в прямоугольной системе координат, начало которой совпадает с центром масс основного притягивающего тела. Выбор такого тела обычно определяется характером движения рассматриваемого ИСЗ. Так, для искусственных спутников планет за основное небесное тело обычно принимают соответствующую планету.
Векторное уравнение может быть представлено следующим соотношением:

где r - вектор, определяющий положение ИСЗ в принятой системе координат;
ri (i=1, 2, …, N) - векторы, составленные из координат всех окружающих небесных тел, кроме основного, притяжение к которому учитывается при решении задачи;
N - число окружающих небесных тел;
M0 - масса основного притягивающего тела;
µ0 - произведение массы притягивающего тела на гравитационную постоянную;
µi (i=1, 2, …, N) - произведение масс окружающих небесных тел на гравитационную постоянную;
P - сумма дополнительных сил, действующих на ИСЗ, т.е. всех сил, за исключением притяжения к центрам рассматриваемых небесных тел;
P0 - сумма дополнительных сил, действующих на основное тело;
М - масса КА.
Величины N, M0, µ0, µi, P, P0 записываются в память вычислительного устройства, они являются постоянными (константами).
На выходе блока прогнозирования параметров движения ИСЗ (6) выдаются прогнозируемые параметры движения ИСЗ на заданный интервал, а также текущее положение измерительных средств в геоцентрической прямоугольной системе координат на текущее время.
Блок расчета значений измеряемого параметра (7) является вычислителем значений измерений дальности для заданной группировки измерителей дальности и для ИСЗ с конкретными параметрами, задаваемыми начальными условиями. В нем определяются расчетные значения измеряемого параметра, в качестве которых используется дальность.
Для функционирования этого блока используются следующие исходные данные:
- текущие координаты ИСЗ и измерительных средств для расчета дальности, которые поступают из блока прогнозирования с текущим временем и с заданным темпом Δt;
- величина угла места для антенн измерителей дальности, с которого начинается и заканчивается зона радиовидимости;
- мерный интервал, на котором рассчитываются дальности.
Расчетная дальность Dиj от фазового центра антенны измерителя дальности до фазового центра бортовой антенны определяется с использованием соотношения:

где j=1, 2, …, N; N - количество измерений на мерном интервале;
XjKA, YjKA, ZjKA - текущие координаты ИСЗ с заданным темпом Δt в прямоугольной геоцентрической системе координат;
XjИ, YjИ, ZjИ - текущие координаты измерительного средства с заданным темпом Δt в прямоугольной геоцентрической системе координат.
Выборка текущих расчетных значений дальности с заданным темпом на мерном интервале записывается в память блока (7).
С первого выхода блока расчета значений измеряемого параметра (7) выборка расчетных значений дальности поступает на первый вход блока моделирования траекторных измерений без воздействия радиопомех (1), а также на второй вход блока расчета отношения мощности сигнала к мощности радиопомех (4).
В блоке моделирования траекторных измерений без воздействия радиопомех (1) формируется выборка моделируемых траекторных измерений, возмущенных погрешностями, которые характерны для траекторных измерений. Данная выборка формируется с использованием следующего соотношения:

где j=1, 2, …, N; N - количество моделируемых траекторных измерений в выборке на мерном интервале;
p=1, 2, …, m; m - количество составляющих погрешностей измерений;
 - суммарная текущая j-ая погрешность за счет всех составляющих;
- суммарная текущая j-ая погрешность за счет всех составляющих;
Dиj - расчетное текущее j-ое измерение дальности;
Dj - моделируемое текущее j-ое измерение дальности, возмущенное погрешностями траекторных измерений.
Выборка моделируемых траекторных измерений формируется с использованием соотношения (3) следующим образом:
На первый вход блока моделирования (1) поступает выборка расчетных значений измерений дальности Dиj с заданным темпом Δt на мерном интервале для каждого измерителя дальности, которая запоминается в этом блоке. В блоке моделирования (1) имеются два счетчика. При записи в память блока каждого j-го расчетного значения дальности Dиj в специальном счетчике расчетных измерений дальности фиксируется их текущее количество и после записи всей выборки расчетных измерений дальности в этом счетчике будет зафиксировано общее количество расчетных измерений дальности на мерном интервале N.
На второй вход блока моделирования траекторных измерений без воздействия радиопомех (1) поступают статистические характеристики погрешностей траекторных измерений из блока исходных данных, которые запоминаются в этом блоке, причем систематические и случайные погрешности записываются в память блока отдельно. Кроме этого в память блока записывается количество составляющих погрешностей траекторных измерений Р.
В блок моделирования траекторных измерений без воздействия радиопомех (1) включены два датчика случайных чисел. Для одного датчика исходной информацией являются статистические характеристики систематических погрешностей, а для другого - статистические характеристики случайных погрешностей траекторных измерений.
На один датчик из запоминающего устройства поступают статистические характеристики систематических погрешностей, на другой датчик из запоминающего устройства поступают статистические характеристики случайных погрешностей траекторных измерений. Датчики формируют погрешности синхронно и выдают их на два входа сумматора погрешностей траекторных измерений, причем систематическую погрешность на первый вход, а случайную погрешность на другой. Затем с выхода сумматора погрешностей текущая суммарная погрешность  поступает на первый вход сумматора формирования моделируемых измерений, а на второй вход этого сумматора поступает текущая расчетная дальность Dиj.
поступает на первый вход сумматора формирования моделируемых измерений, а на второй вход этого сумматора поступает текущая расчетная дальность Dиj.
Таким образом, с выхода сумматора формирования моделируемых измерений выдается текущее моделируемое траекторное измерение дальности, возмущенное погрешностями измерений Dj, и затем записывается в запоминающее устройство. Одновременно в счетчике моделируемых измерений дальности фиксируется текущее количество моделируемых измерений на мерном интервале.
Процесс формирования моделируемых траекторных измерений завершается при условии равенства количества расчетных измерений дальности и количества моделируемых измерений дальности. После этого к-ая выборка моделируемых траекторных измерений дальности с выхода блока моделирования (1) поступает на первый вход блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8). Эта же к-ая выборка моделируемых траекторных измерений дальности Dj с выхода блока (1) поступает на первый вход блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех (2).
В качестве исходных данных для определения параметров движения ИСЗ в блоке определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) используются:
- опорные начальные условия параметров движения ИСЗ, которые поступают на третий вход блока;
- выборка моделируемых траекторных измерений без воздействия радиопомех на мерном интервале, которая поступает из блока моделирования траекторных измерений (1), которая поступает на первый вход блока;
- состав уточняемых параметров.
Для определения (уточнения) параметров движения ИСЗ используется метод наименьших квадратов (алгоритм фильтрации).
Алгоритм фильтрации по методу наименьших квадратов сводится к отысканию оценки q0 из условия достижения минимума квадратичной формы:

где δT - вектор невязок между моделируемыми траекторными измерениями и их расчетными значениями;
К-1 - положительно определяемая корреляционная матрица.
Блок определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) представляет собой вычислительное устройство, в котором реализован алгоритм фильтрации по методу наименьших квадратов, позволяющий определить параметры движения ИСЗ по выборке моделируемых траекторных измерений без воздействия радиопомех, полученных на заданном мерном интервале. Одна к-ая выборка моделируемых траекторных измерений на мерном интервале считается одной реализацией.
На выходе блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) выдаются уточненные параметры движения ИСЗ (уточненные начальные условия параметров движения ИСЗ) q0i в к-ой реализации, где К=1, 2, …, n.
Уточненные начальные условия поступают на первый вход блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10) и запоминаются в этом блоке.
С первого выхода блока расчета значений измеряемого параметра (7) выборка текущих расчетных значений дальности Dиj поступает на второй вход блока расчета отношения мощности сигнала к мощности радиопомех (4), который представляет собой вычислительное устройство с памятью, куда записывают поступившую выборку текущих расчетных значений дальности. Вычислительное устройство данного блока позволяет определить отношение мощности сигнала к мощности различного вида радиопомех на входе радиоприемников траекторных систем навигационного контура.
В соответствии с моделью радиоэлектронного противодействия вероятный противник осуществляет подавление группировки наземных траекторных систем в радиолинии «борт-Земля» и в зависимости от их размещения выбирает тактику подавления и носители передатчиков радиопомех. В качестве носителей передатчиков радиопомех могут применяться самолеты, вертолеты и беспилотные аппараты, которые баррожируют на определенной дальности от объектов подавления. Маршрут и дальность носителя передатчика радиопомех при моделировании задаются исходными данными в блоке (5). Предполагается, что в глубине территории РФ траекторные системы подавляют передатчиками радиопомех, которые разбрасываются в районе их дислокации.
Для моделирования указанных выше сценариев подавления группировки наземных траекторных систем на первый вход блока (4) из блока исходных данных (5) подают информацию о технических характеристиках бортовой и наземной аппаратуры траекторных систем, а также информацию о технических характеристиках средств подавления, которые записываются в память блока (4).
На второй вход блока (4) подают выборку текущих расчетных значений дальности Dиj из блока (7), которое соответствует текущему расстоянию между фазовым центром бортовой антенны и фазовыми центрами наземных антенн траекторных систем.
На третий вход блока (4) из блока исходных данных (5) подают величину расстояния между объектом подавления и источником радиопомех Dпхj, которую в общем случае будем считать постоянной и которую также записывают в память блока.
При воздействии, например, шумовой радиопомехи, текущее отношение мощности сигнала к мощности радиопомехи (Рс/Рпх)j на входе радиоприемного устройства траекторией системы определяют по следующей формуле:

С выхода блока (4) на второй вход блока моделирования погрешностей за счет воздействия радиопомех (3) подают текущее значение отношения мощности сигнала к мощности шумовой радиопомехи (Рс/Рпх)j.
На первый вход блока моделирования погрешностей за счет воздействия радиопомех (3) с четвертого выхода блока исходных данных (5) подают статистические характеристики погрешностей траекторных измерений за счет воздействия шумовой радиопомехи и соответствующие этим характеристикам отношения мощности сигнала к мощности шумовой радиопомехи и записывают эти данные в память этого блока.
Статистические характеристики погрешностей траекторных измерений за счет воздействия шумовой радиопомехи представлены в виде систематической и случайной погрешностей траекторных измерений.
Блок моделирования погрешностей за счет воздействия радиопомех (3) состоит из блока памяти, блока сравнения, двух датчиков случайных чисел, сумматора и счетчика реализации.
С выхода блока (4) на второй вход блока (3) подают текущее j-тое значение отношения мощности сигнала к мощности шумовой радиопомехи. Это текущее значение отношения (Рс/Рпх)j поступает на блок сравнения, где его сравнивают со значениями отношения мощности сигнала к мощности шумовой радиопомехи (Рс/Рпх)а, полученными по результатам испытаний на помехоустойчивость траекторией системы, где a-количество значений отношения мощности сигнала к мощности шумовой радиопомехи, при которых получены случайные реализации погрешностей за счет воздействия шумовой радиопомехи в процессе испытаний на помехоустойчивость траекторией системы. Затем после статистической обработки каждой случайной реализации погрешностей измерений за счет воздействия шумовых радиопомех получают статистические характеристики этих погрешностей, которые соответствуют конкретному отношению мощности сигнала к мощности шумовой радиопомехи.
В случае, если (Рс/Рпх)a≤(Рс/Рпх)j≤(Рс/Рпх)а+1, то выбирают статистические характеристики погрешностей за счет воздействия шумовой радиопомехи, которые соответствуют отношению (Рс/Рпх)а+1.
В блоке (3) для одного датчика случайных чисел исходной информацией являются статистические характеристики систематических погрешностей траекторных измерений за счет воздействия радиопомех, а для другого датчика - статистические характеристики случайных погрешностей траекторных измерений за счет воздействия радиопомех.
После определения статистических характеристик погрешностей за счет воздействия радиопомех, которые соответствуют рассчитанному текущему отношению мощности сигнала к мощности радиопомехи, на один датчик из блока памяти поступает статистическая характеристика систематической погрешности, на другой датчик из блока памяти поступает статистическая характеристика случайной погрешности траекторных измерений за счет воздействия шумовой радиопомехи. Датчики формируют погрешности синхронно и выдают их на два входа сумматора погрешностей траекторных измерений за счет воздействия радиопомех, причем систематическую составляющую погрешности подают на первый вход, а случайную составляющую погрешности на другой вход. Затем с выхода сумматора текущую суммарную погрешность траекторных измерений за счет воздействия шумовой радиопомехи Dпхj подают на второй вход блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех (2).
На первый вход блока (2) из блока моделирования траекторных измерений без воздействия радиопомех (1) поступает выборка текущих моделируемых траекторных измерений Dj, которая записывается в память блока.
Блок (2) состоит из запоминающего устройства, сумматора и двух счетчиков траекторных измерений, при этом один счетчик для моделируемых измерений без воздействия помех Dj, другой - для моделируемых измерений, возмущенных погрешностями за счет воздействия радиопомех Dпхj. Текущее количество моделируемых траекторных измерений без воздействия радиопомех фиксируется в счетчике для моделируемых траекторных измерений без воздействия радиопомех. Одновременно текущее моделируемое измерение без помех подают на первый вход сумматора. На второй вход сумматора подают текущие погрешности за счет воздействия радиопомех ΔDпхj.
В сумматоре по формуле: Dпхj=Dj+ΔDпхj формируется текущее j-ое траекторное измерение, возмущенное погрешностью за счет воздействия шумовой радиопомехи Dпхj. С выхода сумматора текущее траекторное измерение, возмущенное погрешностью за счет воздействия шумовой радиопомехи Dпхj, записывают в запоминающее устройство и одновременно в счетчике для моделируемых траекторных измерений, возмущенных погрешностями за счет радиопомехи, фиксируется текущее количество траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех. При равенстве количества измерений в двух счетчиках выборка траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, поступает на первый вход блока определения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9), в качестве исходных данных которого используются:
- опорные начальные условия параметров движения ИСЗ, которые поступают на третий вход блока;
- выборка моделируемых траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех на мерном интервале, которая поступает из блока моделирования траекторных измерений, возмущенных погрешностями за счет воздействия помех (2), которая поступает на первый вход блока;
- состав уточняемых параметров, который поступает на третий вход блока.
Для определения (уточнения) параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, используется метод наименьших квадратов (алгоритм фильтрации).
Алгоритм фильтрации по методу наименьших квадратов сводится к отыскиванию оценки qnx0, которую определяют по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех, из условия достижения максимума квадратичной формы:

где δT - вектор невязок между моделируемыми траекторными измерениями, возмущенными погрешностями за счет воздействия радиопомех, и их расчетными значениями;
K-1nx - положительно определяемая корреляционная матрица, учитывающая погрешности траекторных измерений за счет воздействия радиопомех.
Блок определения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9), представляет собой вычислительное устройство, в котором реализован алгоритм фильтрации по методу наименьших квадратов, позволяющий определить параметры движения ИСЗ по выборке моделируемых траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, полученных на заданном мерном интервале. Одна к-ая выборка траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех и полученных на мерном интервале, считается одной реализацией. На выходе блока (9) выдаются уточненные параметры движения ИСЗ (уточненные начальные условия параметров движения ИСЗ), полученные по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех qnx0i в к-ой реализации, где к=1, 2, …, n. Уточненные текущие начальные условия qnx0i из блока (9) поступают на второй вход блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10) и запоминаются в этом блоке.
Блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10) состоит из запоминающего устройства, сумматора и двух счетчиков для фиксации текущего количества реализации определения параметров движения ИСЗ отдельно по моделируемым траекторным измерениям без воздействия радиопомех и отдельно по траекторным измерениям, полученным в условиях воздействия радиопомех.
В качестве исходных данных в блок (10) поступают:
- на первый вход из блока (8) подают параметры уточненных начальных условий ИСЗ q0i, полученных на мерном интервале по моделируемым траекторным измерениям без воздействия радиопомех;
на второй вход из блока (9) подают параметры уточненных начальных условий ИСЗ qnx0i, полученных на мерном интервале по моделируемым траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех;
- на третий вход подают количество реализаций n из блока исходных данных (5).
Оценка точности определения параметров движения ИСЗ в условиях воздействия радиопомех осуществляется путем статистической обработки погрешностей параметров движения ИСЗ за счет воздействия радиопомех qnx0i, которые определяют по формуле:

В блоке (10) по n реализациям рассчитывают математическое ожидание M[Δqnx0i] и среднеквадратическое отклонение [Δqnx0i] погрешности параметров движения ИСЗ, полученных в условиях радиопомех, которые являются оценками точности определения параметров движения ИСЗ на мерном интервале в условиях воздействия радиопомех, и являются также выходными параметрами заявленной системы оценивания помехозащищенности навигационного контура ИСЗ, которые демонстрируют ухудшение точности определения параметров движения ИСЗ в условиях воздействия радиопомех.
Для фиксации текущего количества реализаций в блоке (10) находятся два счетчика, которые фиксируют количество реализаций уточнения начальных условий при воздействии радиопомех и без воздействия радиопомех.
Работа системы оценивания помехозащищенности навигационного контура ИСЗ осуществляется следующим образом.
На вход блока исходных данных (5), который является входом системы оценивания помехозащищенности навигационного контура ИСЗ, поступает входная информация для оценивания точности определения параметров движения ИСЗ без воздействия радиопомех и в условиях воздействия радиопомех.
В качестве входных данных используется специальное задание, которое для каждого блока системы формируется и записывается в блок исходных данных (5).
Для блока моделирования траекторных измерений без воздействия радиопомех (1) формируют количество составляющих погрешностей и их величины, которые представляют в виде систематической и случайной погрешностей траекторных измерений.
Для блока прогнозирования параметров движения ИСЗ (6) формируют опорные начальные условия, мерный интервал, каталог траекторных средств и их координаты, а также задают метод и шаг интегрирования, интервал прогноза, темп измерений, массу ИСЗ и другие данные.
Для блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9), формируют опорные начальные условия, состав уточняемых параметров, количество реализации и др.
Для блока моделирования погрешностей за счет воздействия радиопомех (3) формируют статистические характеристики погрешностей траекторных измерений для каждого вида радиопомехи и соответствующего им отношения мощности сигнала к мощности радиопомехи.
Для блока расчета отношения мощности сигнала к мощности радиопомех (4) формируют технические характеристики бортовой и наземной аппаратуры траекторией системы, а также технические характеристики средств подавления и маршруты баррожирования носителей радиопомех и текущее расстояние между источником радиопомех и объектом подавления и др.
Для блока оценки точности определения параметров движения ИСЗ в условиях создания радиопомех формируется информация о количестве реализации, по которым осуществляется оценка ухудшения точности параметров движения ИСЗ за счет воздействия радиопомех.
Указанная выше информация с выходов блока исходных данных выдается на соответствующие блоки системы оценивания помехозащищенности навигационного контура ИСЗ.
В блоке прогнозирования параметров движения ИСЗ (6) по заданным опорным начальным на заданное текущее время tj, где j=1, 2, …, N, tj>tну, для заданного состава траекторных средств, мерного интервала, темпа измерений Δt рассчитывают текущие координаты ИСЗ и координаты траекторных средств в прямоугольной геоцентрической системе координат. Эти данные поступают на вход блока расчета значений измеряемого параметра (7), в котором с использованием заданного угла места для наземных антенн траекторных средств, с которого начинается и заканчивается определение расчетной дальности на интервале сеанса, витка, зоны радиовидимости. В качестве исходных данных из блока (6) на вход блока (7) поступают текущие координаты ИСЗ и траекторных средств, которые дают возможность по формуле (2) рассчитать дальность от каждого траекторного средства до ИСЗ с заданным темпом на заданном мерном интервале для всей группировки траекторных средств.
Выборка расчетных дальностей Dиj, где j=1, 2, …, N, N - количество траекторных измерений на мерном интервале, поступает на первый вход блока моделирования траекторных измерений без воздействия радиопомех (1), где эту выборку запоминают. Затем каждую j-ую текущую расчетную дальность возмущают погрешностями измерений, которые формируют с помощью датчиков случайных чисел в соответствии с формульным соотношением (3). При этом суммарная погрешность моделируемых измерений дальности включает количество составляющих погрешностей m, которое задано в исходных данных и которое поступает со статистическими характеристиками погрешностей на второй вход блока (1) из блока исходных данных (5).
Одновременно выборка расчетных дальностей Dиj из блока (7) поступает на второй вход блока расчета отношения мощности сигнала к мощности радиопомех (4), которое записывают в памяти этого блока.
С выхода блока моделирования траекторных измерений без воздействия радиопомех (1) выдается к-ая выборка траекторных измерений Dj на мерном интервале, которая поступает на первый вход блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) и на первый вход блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех (2).
В блоке определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех (8) уточняют начальные условия по поступившей выборке измерений в соответствии с заданным составом уточняемых параметров движения ИСЗ с использованием формульного соотношения (4).
Процесс фильтрации по методу наименьших квадратов завершают при выполнении условия:
 ,
,
где в - допустимая величина погрешности, которую не должна превышать величина невязок δ в к-ой выборке на каждом сближении (итерации).
Если величина невязок δ больше допустимой величины в, то текущие уточняемые начальные условия на данной итерации с выхода блока (8) поступают на вход блока прогнозирования параметров движения ИСЗ (6), где с использованием формулы (1) рассчитывают прогнозируемые параметры движения ИСЗ, а также текущее положение траекторных средств в геоцентрической прямоугольной системе координат с заданным темпом. Затем эти данные поступают на вход блока расчета значений измеряемого параметра (7), где по формуле (2) рассчитывают дальности на данной итерации на мерном интервале. Со второго выхода блока расчета значений измеряемого параметра (7) выборка текущих расчетных измерений дальности поступает на второй вход блока (8), и это происходит до тех пор, пока не будет выполнено условие (8).
При выполнении условия (8) завершается процесс фильтрации и уточненные начальные условия q0i, полученные в к-ой реализации, подают на первый вход блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10).
В блоке (10) значение q0i в к-ой реализации записывают в память блока, а в счетчик, который фиксирует количество выборок траекторных измерений без воздействия радиопомех, записывают текущее к-ое значение количества реализации. Текущее к-ое значение количества реализации сравнивают с заданным количеством реализации n, которое записано в память блока (10).
В случае, если к≠n, то в блоке моделирования траекторных измерений без воздействия радиопомех (1) по формуле (3) формируют очередную (к+1) выборку моделируемых измерений без воздействия радиопомех, которая с выхода блока (1) поступает в блок определения параметров движения ИСЗ (8). По этой очередной (к+1) выборке по формуле (4) уточняют (к+1) начальные условия q0i, которые поступают в блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10) и одновременно в счетчике фиксируют текущее к-тое количество реализации для статистической оценки.
При выполнении условия к=n процесс формирования очередной выборки моделируемых траекторных измерений в блоке (1) заканчивается, и заканчивается процесс уточнения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех. При этом необходимое количество реализации уточненных начальных условий, полученных по траекторным измерениям без воздействия радиопомех, записаны в блоке (10) для дальнейшей обработки.
После завершения процесса уточнения начальных условий параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех по n реализациям начинают функционировать блоки системы оценивания помехозащищенности, которые предназначены для моделирования воздействия радиопомех на группировку траекторных систем.
В блоке расчета отношения мощности сигнала к мощности радиопомех (4) определяют текущее отношение мощности сигнала к мощности шумовой радиопомехи (Pc/Pnх)j по формуле (5) с использованием записанных в память блока (4) исходных данных для всей группировки траекторных систем.
С выхода блока (4) текущее значение отношения (Pc/Pnx)j поступает на второй вход блока моделирования погрешностей за счет воздействия радиопомех (3).
В блоке (3) по формуле (6) для текущего значения отношения (Pc/Pnx)j на мерном интервале выбирают значение (Рс/Рnх)а, которому соответствуют вполне определенные статистические характеристики погрешностей за счет воздействия шумовой радиопомехи, полученные при проведении испытаний на помехоустойчивость отдельно взятой траекторией системы.
Каждому текущему j-му отношению (Pc/Pnx)j будет соответствовать j-ая величина систематической погрешности и j-ая величина случайной погрешности за счет воздействия шумовой радиопомехи.
В блоке (3) систематическая погрешность поступает на один датчик случайных чисел для моделирования систематической составляющей погрешности за счет воздействия шумовой радиопомехи, на другой датчик случайных чисел поступает случайная погрешность для моделирования случайной составляющей погрешности за счет воздействия шумовой радиопомехи.
Оба датчика формируют погрешности синхронно и выдают их на два входа сумматора погрешностей траекторных измерений за счет воздействия радиопомех, причем систематическую составляющую погрешности подают на первый вход, а случайную составляющую погрешности - на другой вход сумматора. Затем с выхода сумматора текущую суммарную погрешность траекторных измерений за счет воздействия шумовой радиопомехи ΔDnxj подают на второй вход блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех (2).
На первый вход блока (2) из блока моделирования траекторных измерений без воздействия радиопомех (1) поступает выборка текущих моделируемых траекторных измерений Dj, которая записывается в память блока (2).
В блоке (2) в соответствии с формулой (7) формируют выборку траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех Dnxj. Затем данная выборка с выхода блока (2) поступает на первый вход блока определения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9).
В блоке (9) с использованием алгоритма фильтрации по методу наименьших квадратов по выборке траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, по формуле (6) оценку определения параметров движения ИСЗ, полученную в условиях воздействия шумовой радиопомехи qnxo.
Таким образом, на выходе блока (9) выдаются уточненные параметры движения ИСЗ, полученные по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех, qnxoi в к-ой реализации (выборке), где к=1, 2, …, n.
Процесс фильтрации по методу наименьших квадратов завершают при выполнении условия:

где θ - допустимая величина погрешности, которую не должна превышать величина невязок δпх в условиях воздействия радиопомех в к-ой выборке на каждом сближении (итерации) при определении параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех.
Если величина невязок δnх больше допустимой величины θ, то текущие уточняемые начальные условия по данной итерации с выхода блока (9) поступают на вход блока прогнозирования параметров движения ИСЗ (6), где с использованием формулы (1) рассчитывают прогнозируемые параметры движения ИСЗ, а также текущее положение группировки траекторных систем в геоцентрической прямоугольной системе координат с заданным темпом Δt. Затем эти данные поступают на вход блока расчета значений измеряемого параметра (7), где по формуле (2) рассчитывают дальности на данной итерации на мерном интервале. Со второго выхода блока расчета значений измеряемого параметра (7) выборка текущих расчетных измерений дальности поступает на второй вход блока (9) и это продолжается до тех пор, пока не будет выполнено условие (9).
При выполнении условия (9) завершается процесс фильтрации и уточненные начальные условия qnxoi, полученные в к-ой реализации, подают на второй вход блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10).
В блоке (10) значения qnxoi в к-ой реализации записываются в память блока и в счетчик, который фиксирует текущее количество реализаций траекторных измерений на мерном интервале в условиях воздействия радиопомех, и записывается текущее к-ое значение количества реализации. Текущее к-ое значение количества реализации сравнивают с заданным количеством реализации n, которое записано в память блока (10).
В случае, если к≠n, то в блоке моделирования погрешностей за счет воздействия радиопомех (3) формируется текущая (к+1) выборка суммарной погрешности за счет воздействия шумовой радиопомехи ΔDnxj, которую подают на второй вход блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех (2).
В блоке (2) по формуле (7) формируется (к+1) выборка моделируемых измерений с учетом воздействия радиопомех, которая с выхода блока (2) поступает на первый вход блока определения параметров движении ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех (9).
По этой текущей (к+1) выборке в блоке (9) по формуле (6) уточняются (к+1) начальные условия qnxo, которые поступают на второй вход блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10).
Одновременно в счетчике, который считает количество реализации траекторных измерений, полученных на мерном интервале в условиях воздействия радиопомех, фиксируется (к+1) текущая реализация, и текущее количество реализации сравнивается с заданным количеством реализаций n.
При выполнении условия к=n процесс формирования очередной выборки погрешностей за счет воздействия радиопомех в блоке (3) заканчивается, а также заканчивается формирование траекторных возмущенных погрешностями измерений за счет воздействия радиопомех в блоке (2) и заканчивается процесс уточнения параметров движения ИСЗ по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех в блоке (9).
Все уточненные начальные условия, полученные в условиях воздействия радиопомех, запоминают в блоке оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех (10). В этом же блоке по формуле (9) определяют погрешности параметров движения ИСЗ за счет воздействия радиопомех qnxoi по всему количеству реализаций n. Затем проводят статистическую обработку qnxo и рассчитывают математическое ожидание M[Δqnxoi] и среднеквадратическое отклонение
[Δqnxoi] погрешностей параметров движения ИСЗ, полученных в условиях воздействия радиопомех, которые являются оценками точности определения параметров движения ИСЗ на мерном интервале по траекторным измерениям, возмущенным погрешностями за счет воздействия радиопомех. Полученные оценки являются выходными параметрами заявленной системы оценивания помехозащищенности навигационного контура ИСЗ, которые демонстрируют ухудшение точности определения параметров движения ИСЗ за счет воздействия радиопомех.
Таким образом, заявленная система позволяет достичь поставленной цели и оценить помехозащищенность такого сложного комплекса, как навигационный контур ИСЗ. При этом определяется критическое отношение мощности сигнала к мощности радиопомехи на входе приемников траекторных систем, при котором погрешности параметров движения ИСЗ, полученные в условиях воздействия радиопомех, превышают допустимые.
Источники информации
1. ГЛОНАСС. Принципы построения и функционирования. Под ред. А.И.Перова, В.Н.Харисова, М.: Радиотехника, 2005, с.269-282 - (Л1).
2. Основы радиоуправления. Под ред. В.А.Вейцеля, В.Н.Типугина, М.: Сов. Радио, 1973, с.175-188 - (Л2).
3. Владимиров В.И., Лихачев В.П., Шляхин В.М., Антагонистический конфликт радиоэлектронных систем. Методы и математические модели, М.: Радиотехника, 2004, с.328-368 - (Л3).
4. Современная радиоэлектронная борьба. Вопросы методологии. Под ред. В.Г.Радзишевского, М.: Радиотехника, 2006, с.339-345 - (Л4).
5. Борисов В.И., Помехозащищенность систем радиосвязи: основы теории и принципы реализации, М.: Наука, 2009, с.58-63 - (Л5).
6. Патент Российской Федерации на изобретение RU 2193782 С2, оп. 27.11.2002 - (Л6).
7. Патент Российской Федерации на изобретение RU 2391265 C1, оп. 10.06.2010 - (Л7).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2009 |
|
RU2397927C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ ПО ИЗМЕРЕНИЯМ ТЕКУЩИХ НАВИГАЦИОННЫХ ПАРАМЕТРОВ НА КОРОТКОМ МЕРНОМ ИНТЕРВАЛЕ | 2011 |
|
RU2498219C2 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ АДАПТИВНЫХ РАДИОПОМЕХ | 2018 |
|
RU2707200C2 |
Изобретение относится к области космонавтики, а именно к оцениванию помехозащищенности сложных космических комплексов управления ИСЗ, к которым относится, в частности, навигационный контур ИСЗ. Достигаемый технический результат заявленного изобретения - получение оценок точности определения параметров орбит ИСЗ на мерном интервале для любого класса ИСЗ (низкоорбитальных, среднеорбитальных и высокоорбитальных ИСЗ) в условиях воздействия радиопомех. Система оценивания помехозащищенности навигационного контура искусственного спутника Земли содержит блок моделирования траекторных измерений без воздействия радиопомех, блок формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, блок моделирования погрешностей за счет воздействия радиопомех, блок расчета отношения мощности сигнала к мощности радиопомех, блок исходных данных, блок прогнозирования параметров движения ИСЗ, блок расчета значений измеряемого параметра, блок определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех, блок определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех и блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, определенным образом соединенных между собой. 1 ил.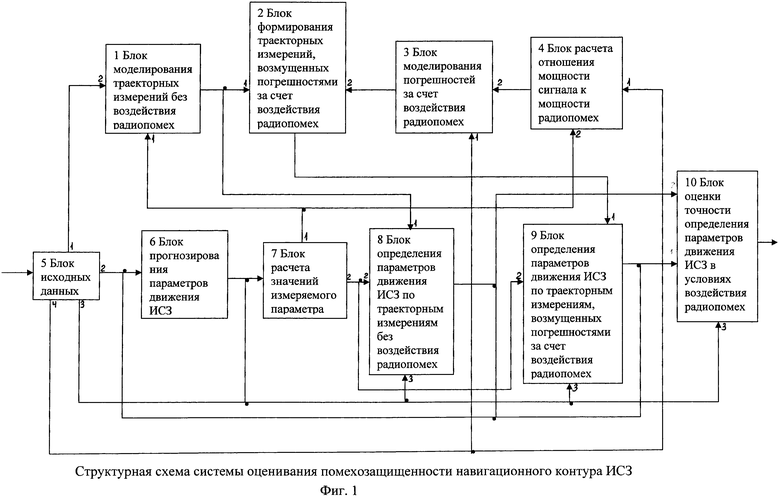
Система оценивания помехозащищенности навигационного контура искусственного спутника Земли (ИСЗ), содержащая блок исходных данных, вход которого является входом системы, блок прогнозирования параметров движения ИСЗ, блок расчета значений измеряемого параметра, блок определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех, блок определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, блок моделирования траекторных измерений без воздействия радиопомех, блок формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, блок моделирования погрешностей за счет воздействия радиопомех, блок расчета отношения мощности сигнала к мощности радиопомех и блок оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, при этом первый выход блока исходных данных соединен со вторым входом блока моделирования траекторных измерений без воздействия радиопомех, выход которого соединен с первыми входами блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех соответственно, второй выход блока исходных данных соединен с входом блока прогнозирования параметров движения ИСЗ и с первым и вторым входами блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех соответственно, третий выход блока исходных данных соединен с входом блока расчета значений измеряемого параметра и третьими входами блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех, блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех и блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех соответственно, четвертый выход блока исходных данных соединен с первыми входами блока моделирования погрешностей за счет воздействия радиопомех и блока расчета отношения мощности сигнала к мощности радиопомех соответственно, выход блока расчета отношения мощности сигнала к мощности радиопомех соединен со вторым входом блока моделирования погрешностей за счет воздействия радиопомех, выход которого соединен со вторым входом блока формирования траекторных измерений, возмущенных погрешностями за счет воздействия радиопомех, выход которого соединен с первым входом блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, выход которого соединен со вторым входом блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, выход блока прогнозирования параметров движения ИСЗ соединен со входом блока расчета значений измеряемого параметра, первый выход которого соединен с первым входом блока моделирования траекторных измерений без воздействия радиопомех и вторым входом блока расчета отношения мощности сигнала к мощности радиопомех, а второй выход блока расчета значений измеряемого параметра соединен со вторыми входами блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех соответственно, с выходов блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех и с выходов блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, соответствующие данные поступают на вход блока прогнозирования параметров движения ИСЗ, выходы блока определения параметров движения ИСЗ по траекторным измерениям без воздействия радиопомех и блока определения параметров движения ИСЗ по траекторным измерениям, возмущенных погрешностями за счет воздействия радиопомех, соединены с первым и вторым входами соответственно блока оценки точности определения параметров движения ИСЗ в условиях воздействия радиопомех, выход которого является выходом системы.
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| АРХИТЕКТУРА И СПОСОБ НАВИГАЦИОННОЙ СИСТЕМЫ GPS ЛЕТАТЕЛЬНОГО АППАРАТА С ДВОЙНЫМ РЕЗЕРВИРОВАНИЕМ И ЗАЩИТОЙ ОТ ПОМЕХ | 2003 |
|
RU2336537C2 |
| БЛОК ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2190941C1 |
| ЭКСПЕРИМЕНТАЛЬНАЯ ИНФОРМАЦИОННАЯ КОСМИЧЕСКАЯ СИСТЕМА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2000 |
|
RU2180642C1 |
| US 7535402 В1, 19.05.2009 | |||
| WO 2009076936 A2, 25.06.2009 | |||
| JP 11261464 A, 24.09.1999 | |||
| УСТРОЙСТВО ДЛЯ КУПАНИЯ ОВЕЦ | 2006 |
|
RU2333735C2 |

