Изобретение относится к области определения параметров движения искусственного спутника Земли (ИСЗ) по результатам проведения измерений текущих навигационных параметров (ИТНП) на коротком мерном интервале, может быть использовано в автоматизированных системах навигационно-баллистического обеспечения (НБО) в условиях неполной реализации штатной схемы проведения радиоконтроля орбиты (РКО).
Известны способы определения параметров движения ИСЗ по результатам проведения ИТНП [1, 2], которые базируются на технологии построения обратного оператора G-1, реализующего отображение пространства измерений на пространство определяемых параметров.

где G=АТРА, Δq - вектор поправок в уточняемые параметры движения ИСЗ;
А - матрица частных производных от измеряемых параметров по уточняемым;
Δh=hист+δh-hpaсч, hист - вектор истинных значений ИТНП;
δh - вектор ошибок в значениях ИТНП;
hрасч - вектор расчетных значений ИТНП.
В условиях реализации схемы проведения ИТНП на коротком мерном интервале матрица А близка к вырожденной и реализация отображения пространства измерений на пространство определяемых параметров может содержать ошибки превышающие допустимые значения. Решаемая задача в указанных условиях относится к классу некорректных задач определения параметров движения ИСЗ, когда решение является неустойчивым по отношению к ошибкам в векторе ИТНП. Это проявляется в том, что допустимым с точки зрения требований эксплуатационно-технической документации (ЭТД) ошибкам в ИТНП соответствуют недопустимые, согласно требований ЭТД, ошибки в векторе уточняемых параметров. Известный способ, применяемый при этих условиях [2], содержит процедуры декомпозиции задачи (1), базирующиеся на таких преобразованиях оператора G-1, которые позволяют получить пробные решения (2) задач, квазиэквивалентных задаче (1)
и из них выбрать оптимальное.
Недостатком известного способа является отсутствие типовой технологии автоматизированного отбора пробных решений, которые обеспечивают выполнение условия корректности, когда допустимым с точки зрения требований эксплуатационно-технической документации (ЭТД) ошибкам в ИТНП соответствуют допустимые, согласно требований ЭТД, ошибки в векторе уточняемых параметров.
Целью изобретения - повышение точности и оперативности позиционирования ИСЗ за счет обеспечения автоматического синтеза пробного решения, для которого выполняется условие корректности.
Указанная цель достигается тем, что для получения пробных решений используется технология, базирующаяся на следующих соотношениях:
- решения Δqk, k<n принадлежат множеству 

а значение нормированной невязки

на множестве 
- пробные решения Δqk, k<n вычисляются следующим образом:





Расчеты начинаются с Δqk=0, p0=r0=ATWΔh, k=1, 2, …, t.
Для определения множества корректности 

где δhj - вектор ошибок j-го сеанса ИТНП,


σj - среднеквадратическое отклонение ошибки измерений j-го сеанса ИТНП. σj вычисляется на очередном приближении (1) в процедуре повышения достоверности выборки ИТНП.
Формируется проверочная последовательность пробных решений. Для каждого к производится вычисление проекции ошибки вектора ИТНП на пространство уточняемых параметров. Геометрическая интерпретация указанной процедуры в предлагаемом способе приводится на фиг.1.
Для каждого индекса k, k=1, 2, 3, …, n, проверяется условие (3). Формируется набор индексов к, для которых выполнено (3), позволяющий сформировать множество 

Из множества пробных решений, принадлежащих 



в противном случае гипотеза Н0 отвергается. При этом использованное в описании понятие «на коротком мерном интервале» имеет однозначное смысловое содержание для конкретного ИСЗ и является общепринятым в теории и практике траекторных радиотехнических измерений [3].
Источники информации
1. Бажинов И.К., Ястребов В.Д. Навигация в совместном полете космических кораблей «Союз» и «Аполлон». - М.: Мир, 1978. - 224 с.
2. Брандин В.Н., Васильев А.А., Куницкий А.А. Экспериментальная баллистика космических аппаратов. - М.: Машиностроение, 1984. - 264 с.
3. Траекторные радиотехнические измерения / Коллектив авторов под. ред. Агаджанова П.А. - М.: Сов. радио, 1969, 504.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА | 2005 |
|
RU2313104C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНОГО ПРИЕМНИКА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ (СРНС) | 2010 |
|
RU2432584C2 |
| СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624408C2 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2009 |
|
RU2397927C1 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| Способ контроля и повышения целостности измерений авиационных бортовых спутниковых навигационных приемников с применением метода курсовоздушного счисления координат | 2022 |
|
RU2804931C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ДВИГАТЕЛЕЙ КОРРЕКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2535352C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
Изобретение относится к области космического приборостроения и может найти применение в автоматизированных системах навигационно-баллистического обеспечения в условиях неполной реализации штатной схемы проведения радиоконтроля орбиты. Технический результат - повышение точности и оперативности позиционирования ИСЗ. Для достижения данного результата по измерениям текущих навигационных параметров на коротком мерном интервале осуществляют итерационное уточнение вектора состояния на множестве корректности, с использованием проверочной последовательности пробных итераций в условиях неполной реализации штатной схемы проведения радиоконтроля орбиты. При этом использованы процедуры статистической обработки сеансов измерений текущих навигационных параметров. Условия устойчивости и достоверности измерений обеспечено на основе формирования проверочной последовательности альтернативных решений, содержащих оптимальное решение, которое выбирается по принципу соответствия ему проекции вектора ошибки измерений текущих навигационных параметров на пространство уточняемых параметров, не превосходящей заданную ошибку определяемого вектора параметров движения искусственного спутника Земли. 1 ил.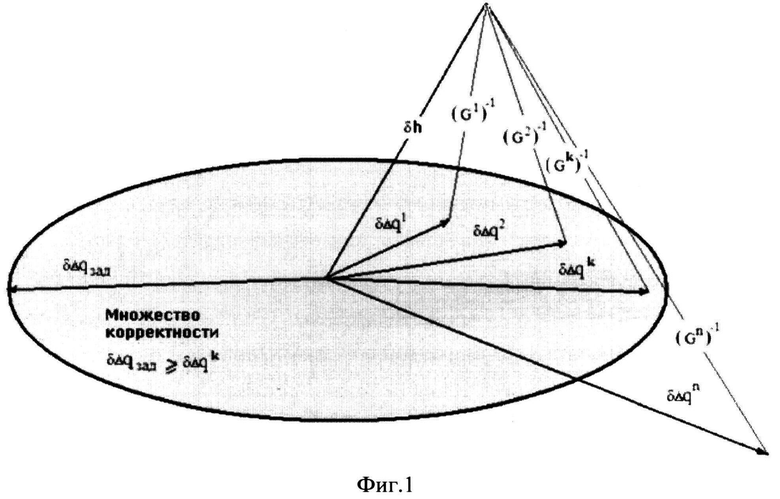
Способ определения параметров движения искусственного спутника Земли по измерениям текущих навигационных параметров (ИТНП), заключающийся в том, что используют результаты радиоконтроля орбиты для определения параметров движения ИСЗ, отличающийся тем, что на коротком мерном интервале в автоматизированных системах навигационно-баллистического обеспечения (НБО) в условиях неполной реализации штатной схемы проведения радиоконтроля орбиты (РКО) используют технологию автоматического получения вектора поправок к уточняемым параметрам на основе выбора пробного решения, для которого выполняется условие корректности, определяемое введением множества векторов поправок (пробных решений) к уточняемым параметрам движения ИСЗ таких, что для заданной погрешности в ИТНП и для заданных ошибок в векторе поправок к уточняемым параметрам выполняется условие, при котором имеющимся погрешностям в ИТНП соответствуют ошибки в векторе поправок, не превосходящие заданные, а также для выбираемого пробного решения значение нормированной невязки незначимо отличается от минимальной по критерию Фишера, а норма вектора решения при этом является минимальной, обеспечивая требования эксплуатационно-технической документации ИСЗ.
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| RU 2059205 С1, 27.04.1996 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| БАЖИНОВ И.К., ЯСТРЕБОВ В.Д | |||
| Навигация в совместном полете космических кораблей «Союз» и «Аполлон» | |||
| - М.: Мир, 1978, 224 с | |||
| САВРАСОВ Ю.С | |||
| Методы определения орбит космических объектов | |||
| - М.: Машиностроение, 1981, с.27, 28, 83-87. | |||

