Заявление о государственном интересе
Изобретение, описанное здесь, может быть реализовано и использовано правительством или для правительства Соединенных Штатов Америки в государственных целях без уплаты за него каких-либо пошлин.
Область техники
Настоящее изобретение относится к радиочастотным (РЧ) системам, используемым для целей навигации, более конкретно, к навигационным системам летательных аппаратов, которые используют сигналы системы глобального позиционирования (GPS) и включают в себя устройства защиты от помех.
Предшествующий уровень техники
Спутниковые навигационные системы используют множество спутников, которые генерируют соответствующие сигналы для приема РЧ приемником на воздушном или наземном транспортном средстве или на другой платформе, для вычисления местоположения платформы. Навигационная система может затем управлять платформой на основе потока сигналов вычислений местоположения. Хорошо известные спутниковые навигационные системы включают в себя Систему глобального позиционирования (GSM) и Глобальную навигационную спутниковую систему (GLONASS). Как использовано в настоящем описании, термин «Система глобального позиционирования» или GSM относится в общем к спутниковым навигационным системам, включая Систему глобального позиционирования, GLONASS и любую другую спутниковую навигационную систему, которая может быть создана в будущем.
Система глобального позиционирования представляет собой сеть спутников, которые передают информацию в сигналах, которая будучи принятой и декодированной позволяет приемнику точно определить свое местоположение в пределах зоны покрытия системы. Спутниковая навигационная система на основе системы глобального позиционирования (GPS) обеспечивает глобальную систему отсчета местоположения, скорости и времени, доступную для использования в электронных навигационных системах. Полезность Системы глобального позиционирования в применениях, связанных с наведением, общепризнанна, как показано в работе Loegering G. et al., "The evolution of the Global Hawk and MALD avionics system", Digital Avionics Systems Conference, Proceedings, 18th St. Louis, MO, USA, Piscataway, NJ, USA, IEEE, US, 24 October 1999.
Наведение на основе GPS, при котором используются сигналы малой мощности от спутников на орбите высотой 11 000 морских миль, очевидным образом легко подавить маломощными дешевыми источниками помех, размещаемыми в различных местоположениях. Ввиду того, что в пределах заданной области может быть размещено большое количество источников помех, исключение воздействия всех до одного источников помех может оказаться невозможным. Даже если несколько их них останутся работоспособными, они могут эффективным образом подавить сигналы GPS.
Кроме того, в среде с интенсивными РЧ полями помеховые сигналы могут создавать эффект подавления РЧ приемника, даже если они не генерировались преднамеренным образом в качестве активных сигналов помех. Подавляющие сигналы помех могут исходить, например, от мачт радио- и телевизионных станций или от любых высокочастотных устройств, таких как радиолокатор, радиостанция или сотовый телефон.
Соответственно термин «помеховый сигнал», как он используется в настоящем описании, относится как к сигналам активных помех, так и к сигналам непреднамеренных помех. Кроме того, термин «свободный от помех» включает в себя и понятие «свободный от непреднамеренных помех», а термин «помехозащита» включает в себя и понятие «защита от непреднамеренных помех».
Различные меры предлагались для обеспечения средств противодействия подавлению помехам для наводимых аппаратов, использующих сигналы GPS. Одно такое решение предусматривает использование антенной системы с управляемым провалом диаграммы направленности. В соответствии с этим методом аппарат оснащается набором антенн, которые ориентируют нуль диаграммы направленности на источник помехового сигнала. Хотя этот метод довольно эффективен, однако, он является дорогостоящим, поскольку число источников помех, на которые может быть ориентирован провал диаграммы направленности, на единицу меньше, чем число антенных элементов. Следовательно, этот метод может оказаться непрактичным при использовании большого числа дешевых источников помех.
Предлагались и другие методы для решения проблемы помеховых сигналов, находящихся в полосе сигналов системы GPS. Один такой метод заключается в использовании увеличенного числа битов в аналого-цифровом преобразователе (АЦП) и применении корреляционной процедуры обработки для снижения воздействия источников помех. Этот способ основан на предпосылке, что коррелятор будет проводить различение между Gold-кодом и непрерывным (узкополосным) сигналом при условии, что уровень мощности источника помех не настолько велик, чтобы переводить АЦП в режим насыщения. За счет расширения динамического диапазона АЦП (с одновременным увеличением числа битов) влияние помеховых сигналов может быть снижено.
Другой метод заключается в «компенсации» вместо «исключения». То есть генерируется «копия» помехового сигнала (или сигнал настолько близкий к копии помехового сигнала, насколько это возможно), и эта сформированная копия вычитается из принятого сигнала. Этот способ компенсации эффективен, когда помеховый сигнал на самом деле является узкополосным непрерывным сигналом, по существу монохроматическим сигналом. Для повышения эффективности применения могут генерироваться и вычитаться несколько копий непрерывного сигнала в случае, когда имеется более одного помехового сигнала.
Хотя в патенте США 5995987 раскрыта система навигации на основе GSM с защитой от помех, однако, имеется потребность в системе и способе для обеспечения навигации летательных аппаратов, которые обеспечивают улучшенную помехозащищенность.
Сущность изобретения
Навигационная система для беспилотного летательного аппарата, выполненная в соответствии с настоящим изобретением, содержит первую антенну для приема сигнала системы глобального позиционирования, первый блок подавления помех, связанный с первой антенной, причем первый блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием первого способа подавления помех, первый навигационный блок для приема сигналов от первого блока подавления помех, вторую антенну для приема сигнала системы глобального позиционирования, второй блок подавления помех, связанный со второй антенной, причем второй блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием второго способа подавления помех, и второй навигационный блок для приема сигналов от второго блока подавления помех.
Система может дополнительно содержать третий навигационный блок для приема сигналов от первого блока подавления помех и четвертый навигационный блок для приема сигналов от второго блока подавления помех.
Первый способ подавления помех может представлять собой способ управления провалом диаграммы направленности антенны, а второй способ подавления помех может представлять собой способ различия по поляризации волнового фронта.
Первая антенна может представлять собой антенну с управляемой диаграммой направленности излучения.
Изобретение также включает в себя способ управления полетом летательного аппарата, причем способ включает в себя этапы использования первой антенны для приема сигнала системы глобального позиционирования, подавления помехи в сигнале системы глобального позиционирования с использованием первого способа подавления помех для формирования первого сигнала системы глобального позиционирования с подавленной помехой, управления первым навигационным блоком в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой, использования второй антенны для приема сигнала системы глобального позиционирования, подавления помехи в сигнале системы глобального позиционирования с использованием второго способа подавления помех для формирования второго сигнала системы глобального позиционирования с подавленной помехой, управления вторым навигационным блоком в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой и использования, по меньшей мере, одного из первого и второго навигационных блоков для управления полетом летательного аппарата.
Способ может также включать в себя этапы управления третьим навигационным блоком в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой, управления четвертым навигационным блоком в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой и использования, по меньшей мере, одного из первого, второго, третьего и четвертого навигационных блоков для управления полетом летательного аппарата.
Первый способ подавления помех может представлять собой способ управления провалом диаграммы направленности антенны, а второй способ подавления помех может представлять собой способ различия по поляризации волнового фронта.
Первая антенна может представлять собой антенну с управляемой диаграммой направленности излучения антенны.
Краткое описание чертежей
На фиг. 1 показано схематичное представление летательного аппарата в комбинации с системой глобального позиционирования и источники помеховых сигналов.
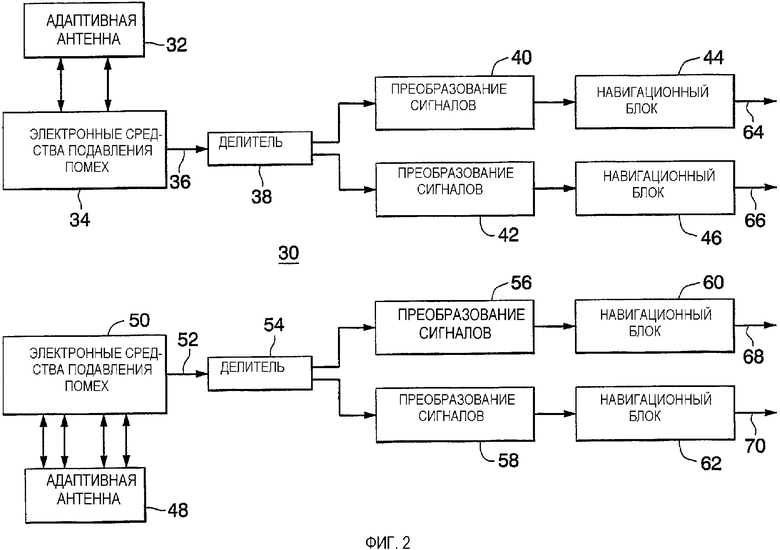
На фиг. 2 показана упрощенная функциональная блок-схема навигационной системы летательного аппарата, выполненной в соответствии с изобретением.
Детальное описание изобретения
На фиг. 1 показано схематичное представление летательного аппарата 10 в комбинации с системой глобального позиционирования (GPS) и источники помеховых сигналов. Система глобального позиционирования содержит множество спутников 12, 14, 16 и 18 на околоземных орбитах в известной конфигурации, передающих сигналы системы глобального позиционирования в соответствии с известными методами. Летательный аппарат содержит две антенны для приема сигналов системы глобального позиционирования от спутников. Летательный аппарат содержит, по меньшей мере, две бортовые навигационные системы. Бортовые навигационные системы используют сигналы GPS для управления полетом летательного аппарата в соответствии с известными методами. Показано множество источников 20, 22 и 24 помеховых сигналов, расположенных в различных местоположениях на земной поверхности. Хотя на фиг. 1 показаны наземные источники помех, понятно, что помеховые сигналы могут создаваться источниками, которые расположены не на земной поверхности.
Источники помеховых сигналов могут создавать помеховые сигналы различных типов в целях нарушения навигации летательного аппарата. Разработаны устройства помехозащиты для обеспечения работы навигационной системы GPS в присутствии помеховых сигналов. Настоящее изобретение использует такие устройства помехозащиты новым способом для обеспечения усовершенствованной защиты от помеховых сигналов.
На фиг. 2 представлена упрощенная функциональная блок-схема навигационной системы 30 летательного аппарата, выполненной в соответствии с изобретением. В бортовых электронных системах навигации и управления весьма желательно реализовать избыточность, чтобы обеспечить целостность и управление летательным аппаратом. Система по фиг. 2 содержит первую антенну 32 для приема сигналов GPS. Первая антенна связана с первым блоком 34 подавления помех, связанным с первой антенной. Первый блок подавления помех подавляет помеху в сигнале системы глобального позиционирования с использованием первого способа подавления помех, чтобы подавить сигналы, создаваемые источниками помех. Первый блок подавления помех формирует выходной сигнал в линии 36, который делится делителем 38 и преобразуется устройствами 40 и 42 преобразования сигнала. Устройства преобразования сигнала могут включать в себя, например, хорошо известные фильтры, предусилители и аттенюаторы, как это требуется для каждого из навигационных блоков 44 и 46.
Вторая антенна 48 также предусмотрена для приема сигналов системы глобального позиционирования. Вторая антенна связана со вторым блоком 50 подавления помех. Второй блок подавления помех подавляет помеху в сигнале системы глобального позиционирования с использованием второго способа подавления помех. Второй блок подавления помех формирует выходной сигнал в линии 52, который делится вторым делителем 52 и преобразуется устройствами 56 и 58 преобразования сигнала. Устройства преобразования сигнала могут включать в себя, например, хорошо известные фильтры, предусилители и аттенюаторы, как это требуется для каждого из навигационных блоков 60 и 62.
Навигационные блоки 44, 46, 60 и 62 формируют сигналы управления, как показано стрелками 64, 66, 68 и 70, которые используются для управления полетом летательного аппарата в соответствии с известными методами.
Блоки подавления помех могут быть выполнены в соответствии с существующими способами и могут включать в себя, например, блоки, которые используют способ управления провалом диаграммы направленности антенны, способ различия по поляризации волнового фронта, способ компенсации помехового сигнала, способ адаптивной временной фильтрации, способ вспомогательного узкополосного следящего фильтра и другие способы обработки сигналов. Один способ может быть предпочтительным по отношению к другому, в зависимости от ожидаемой обстановки, характеризуемой воздействием активных и непреднамеренных помех. С использованием двух различных способов подавления помех система и способ, соответствующие изобретению, снижают вероятность того, что помеховый сигнал воспрепятствует доступу к сигналам GPS, по сравнению с системами, которые содержат избыточные аналогичные компоненты с идентичными способами подавления помех.
Навигационные блоки, используемые в навигационной системе согласно изобретению, могут представлять собой, например, блоки Kearfott KN-4072 INS/GPS и/или блоки Litton LN-100G INS/GPS. Эти блоки работают как с системой инерциальной навигации, так и с системой навигации на основе сигналов системы глобального позиционирования. Блоки подавления помех могут представлять собой, например, блок Electro-Radiation ISU/LRU-2000L1 и/или блок Raytheon Systems GAS-1N. Каждая пара навигационных блоков запитывается от отдельной антенны сигналов GPS. Системы и способ, соответствующие настоящему изобретению, используют принцип несходной избыточности. На летательном аппарате помехозащищенные навигационные системы, соответствующие изобретению, используют архитектуру, которая включает в себя отличающийся тип технологии помехозащиты сигналов GPS в каждой схеме питания антенны сигнала GPS. В одном варианте осуществления изобретения блок подавления помех для одной пары навигационных блоков может представлять собой систему Raytheon GAS-IN, а блок подавления помех для другой пары навигационных блоков может представлять собой систему ER ISU/LRU-2000L1. Компьютер управления полетом летательного аппарата использует информацию с калмановских фильтров навигационного блока для определения того, какое решение использовать для целей навигации, и основывается на использовании выходного сигнала системы с наилучшей оценкой ошибки его местоположения.
Комбинация двух систем помехозащиты обеспечивает летательный аппарат защитой от источников помех и использованием различных способов, обеспечивая тем самым более эффективную защиту, чем та, которая обеспечивалась бы с использованием только одной из систем помехозащиты.
Хотя настоящее изобретение описано в терминах его вариантов осуществления, предпочтительных в настоящее время, для специалистов в данной области техники понятно, что различные изменения могут быть введены в раскрытые варианты осуществления без отклонения от объема изобретения, как определено формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОМАСКИРОВКИ СТАЦИОНАРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513985C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| Помехоустойчивая спутниковая навигационная система малогабаритного беспилотного летательного аппарата | 2024 |
|
RU2837588C1 |
| Способ и устройство создания преднамеренных помех спутниковой системе глобального позиционирования | 2024 |
|
RU2832277C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ПОВЕДЕНИЯ БЛА В УСЛОВИЯХ ИСКАЖЕНИЯ ИЛИ ПОДАВЛЕНИЯ НАВИГАЦИОННОГО ПОЛЯ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2020 |
|
RU2755776C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| СИСТЕМА СПУТНИКОВОЙ НАВИГАЦИИ КРЫЛАТОЙ РАКЕТЫ (ВАРИАНТЫ) | 2016 |
|
RU2650582C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
Изобретение относится к радиочастотным системам, используемым для целей навигации и, конкретнее, к навигационным системам летательных аппаратов (ЛА), которые используют сигналы системы глобального позиционирования (GPS) и включают в себя устройства защиты от помех. Технический результат заключается в повышении помехозащищенности. Навигационная система (30) для беспилотного ЛА содержит первую антенну (32) для приема GPS сигнала, вторую антенну (48) для приема GPS сигнала, первый блок (34) подавления помех, связанный с первой антенной, причем первый блок подавления помех осуществляет подавление помех в GPS сигнале с использованием первого способа подавления помех, первый навигационный блок (44) для приема сигналов от первого блока подавления помех, второй блок (50) подавления помех, связанный со второй антенной, причем второй блок подавления помех осуществляет подавление помех в GPS сигнале с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, и второй навигационный блок (60) для приема сигналов от второго блока подавления помех, причем, по меньшей мере, один из первого и второго навигационных блоков осуществляет управление полетом беспилотного ЛА. 4 н. и 4 з.п. ф-лы, 2 ил.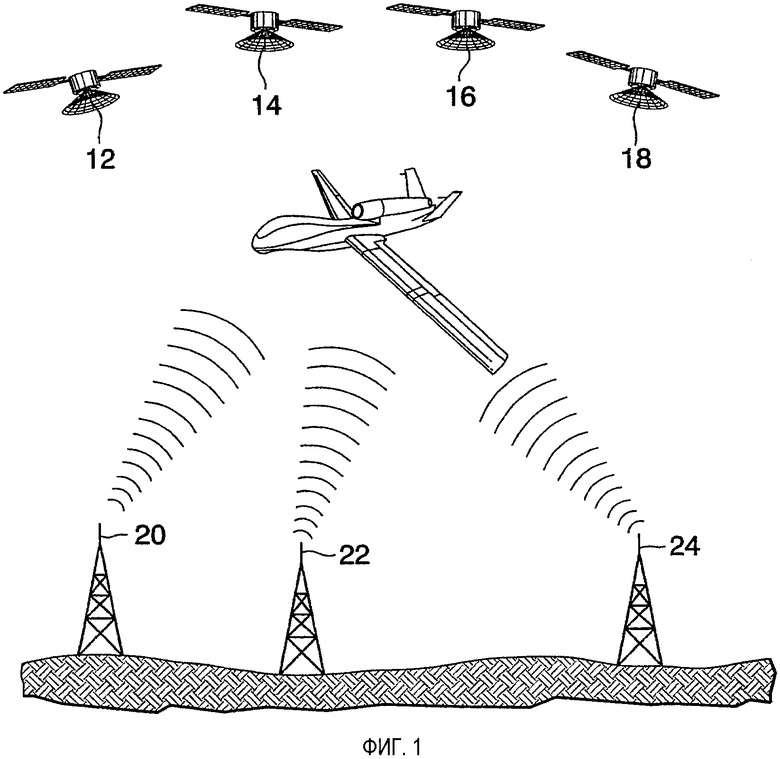
первый блок (34) подавления помех, связанный с первой антенной, причем первый блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием первого способа подавления помех,
первый навигационный блок (44) для приема сигналов от первого блока подавления помех,
второй блок (50) подавления помех, связанный со второй антенной, причем второй блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, и
второй навигационный блок (60) для приема сигналов от второго блока подавления помех, причем, по меньшей мере, один из первого и второго навигационных блоков осуществляет управление полетом беспилотного летательного аппарата.
первый блок (34) подавления помех, связанный с первой антенной, причем первый блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием первого способа подавлена помех,
первый навигационный блок (44) для приема сигналов от первого блока подавления помех,
второй блок (50) подавления помех, связанный со второй антенной, причем второй блок подавления помех осуществляет подавление помех в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, и
второй навигационный блок (60) для приема сигналов от второго блока подавления помех,
третий навигационный блок (46) для приема сигналов от первого блока подавления помех и
четвертый навигационный блок (62) для приема сигналов от второго блока подавления помех, причем, по меньшей мере, один из первого, второго, третьего и четвертого навигационных блоков осуществляет управление полетом беспилотного летательного аппарата.
первый способ подавления помех представляет собой способ управления провалом диаграммы направленности антенны, и
второй способ подавления помех представляет собой способ различия по поляризации волнового фронта.
первая антенна представляет собой антенну с управляемой диаграммой направленности излучения.
подавления помехи в сигнале системы глобального позиционирования с использованием первого способа подавления помех для формирования первого сигнала системы глобального позиционирования с подавленной помехой,
управления первым навигационным блоком (44) в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой,
подавления помехи в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, для формирования второго сигнала системы глобального позиционирования с подавленной помехой,
управления вторым навигационным блоком (60) в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой, и
использования, по меньшей мере, одного из первого и второго навигационных блоков для управления полетом летательного аппарата.
подавления помехи в сигнале системы глобального позиционирования с использованием первого способа подавления помех для формирования первого сигнала системы глобального позиционирования с подавленной помехой,
управления первым навигационным блоком (44) в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой,
подавления помехи в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, для формирования второго сигнала системы глобального позиционирования с подавленной помехой,
управления вторым навигационным блоком (60) в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой, и
управления третьим навигационным блоком (46) в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой,
управления четвертым навигационным блоком (62) в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой и
использования, по меньшей мере, одного из первого, второго, третьего и четвертого навигационных блоков для управления полетом летательного аппарата.
первый способ подавления помех представляет собой способ управления провалом диаграммы направленности антенны, и
второй способ подавления помех представляет собой способ различия по поляризации волнового фронта.
| US 6377892 В1, 23.04.2002 | |||
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| US 6331835 В1, 18.12.2001 | |||
| US 5955987 А, 21.09.1999 | |||
| US 5936571 А, 10.08.1999. | |||

