Область техники, к которой относится изобретение
Настоящее изобретение относится к технике взвешивания автотранспортных средств, в частности в процессе их движения (weigh in motion - WIM) по трассе (далее наряду и на равных с термином «автотранспортное средство» будет употребляться термин «автомобиль»).
Уровень техники
Взвешивание автотранспортных средств в процессе их движения по трассе приобретает все большее значение как для целей контроля перевозимых грузов, так и для взимания платы за проезд и (или) перегруз.
Обычно автотранспортное средство взвешивается на оборудованной стационарными весами площадке при въезде на платную или контролируемую трассу, а также на аналогичных площадках, организованных на самой трассе (патент РФ на полезную модель №88469, опубл. 10.11.2009; патент США №6980093, опубл. 27.12.2005). Понятно, что в этом случае взвешивание дает статическое значение и требует остановки движения и заезда на специальную площадку, оборудованную взвешивающим устройством достаточно высокой точности. Поэтому говорить о взвешивании в процессе движения для такого способа взвешивания можно лишь условно.
В настоящее время все большее применение находит взвешивание автомобилей непосредственно в процессе их движения. Например, на сайте http://www.cross.cz/en/wim-weigh-in-motion описан способ взвешивания автотранспортных средств при их движении по трассе, оборудованной весовыми датчиками, которые дают возможность определять давление на поверхность дороги от каждой проезжающей оси или даже каждого проезжающего колеса того или иного автотранспортного средства. Вблизи таких весовых датчиков установлены считывающие устройства, которые позволяют считывать ту или иную идентификационную метку автомобиля, проезжающего в этот момент по весовому датчику. Считанные данные вместе с отметкой времени пересылаются в центр обработки данных, где обрабатываются с помощью специальной программы для предварительного определения нагрузки на дорожное полотно.
Однако в таких системах, которые как раз и получили название «взвешивание в движении» (weigh in motion - WIM), используемые датчики имеют невысокую точность измерений как из-за технологических особенностей их изготовления, так и вследствие значительной зависимости от погодных условий, времени суток и времени года. Поэтому на таких трассах при необходимости осуществлять штрафные санкции обязательно дополнительно используют весы необходимой точности, которые позволяют, например, производить начисление штрафных санкций за поосный или общий перевес автомобиля. Еще один пример такой системы описан в патенте США №7684946 (опубл. 23.03.2010). В этом случае показания весовых датчиков, размещенных в дорожном полотне, периодически корректируются по показаниям точных весов. Но наличие указанных точных весов резко удорожает всю используемую систему.
Раскрытие изобретения
Цель настоящего изобретения состоит в разработке такого способа взвешивания автотранспортного средства непосредственно в процессе его движения по трассе, который позволил бы существенно повысить точность измерений всех весовых датчиков, установленных на трассе, без использования отдельных точных весов, что в итоге снизит стоимость используемого оборудования.
Для решения этой задачи и достижения указанного технического результата в первом объекте настоящего изобретения предложен способ взвешивания автотранспортного средства непосредственно в процессе его движения по трассе, заключающийся в том, что: устанавливают на заранее заданных расстояниях на трассе взвешивающие устройства для поколесного или поосного взвешивания автотранспортных средств; размещают вблизи каждого из взвешивающих устройств считывающее устройство, выполненное с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство, проезжающее через данное взвешивающее устройство, с одновременной фиксацией времени этого считывания; принимают, в центре обработки данных, показания каждого взвешивающего устройства при проезде по нему колеса или колес каждой из осей конкретного автотранспортного средства с одновременным считыванием по меньшей мере одной идентификационной метки этого автотранспортного средства соответствующим считывающим устройством и с фиксацией времени этого считывания; формируют серии измерений из показаний взвешивающих устройств, принятых в центре обработки данных, по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой; усредняют показания взвешивающих устройств в соответствующей серии измерений; и приравнивают показания взвешивающих устройств для автотранспортного средства с одной и той же идентификационной меткой, составляющие данную серию измерений, к усредненному значению в этой серии измерений.
Особенность способа по настоящему изобретению состоит в том, что в памяти центра обработки данных могут сохранять принятые показания взвешивающих устройств вместе с соответствующими идентификационными метками.
Еще одна особенность способа по настоящему изобретению состоит в том, что могут выполнять действия, в которых: формируют серии измерений из тех по меньшей мере двух показаний следующих друг за другом на трассе взвешивающих устройств для одних и тех же колес или осей идентифицированного автотранспортного средства, отклонения которых от их усредненного значения меньше заранее заданного порога; при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину меньше заранее заданного порога продолжают в данной серии измерений прием показаний и их усреднение; при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключают это показание из данной серии измерений; при отклонении следующего после исключенного показания от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключают это показание из данной серии измерений и сравнивают его с предыдущим исключенным показанием; при наличии заранее заданного количества следующих подряд исключенных показаний, отклонение которых друг от друга меньше заранее заданного порога, завершают текущую серию измерений и начинают новую серию измерений с этих следующих подряд показаний, исключенных из данной серии измерений.
При этом заранее заданное количество следующих подряд исключенных показаний может быть равно двум или более.
Кроме того, если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в первом заранее заданном числе следующих подряд серий измерений, то временно исключают показания этого взвешивающего устройства из последующих серий измерений, но продолжают их прием и сравнение в центре обработки данных; если затем показания этого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину меньше заранее заданного порога во втором заранее заданном числе следующих подряд серий измерений, то отменяют упомянутое временное исключение показаний этого взвешивающего устройства, начиная с очередной серии измерений, если и в этой серии измерений показание этого взвешивающего устройства отличается от усредненного значения предыдущих показаний на величину меньше заранее заданного порога; если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в третьем заранее заданном числе следующих подряд серий измерений, превышающем упомянутое первое заранее заданное число, то прекращают прием показаний от этого взвешивающего устройства и фиксируют его неисправность.
Еще одна особенность способа по настоящему изобретению состоит в том, что заранее заданный порог могут выбирать не меньше разброса показаний самого неточного из используемых взвешивающих устройств.
Еще одна особенность способа по настоящему изобретению состоит в том, что усредненные значения, полученные для всех колес или для всех осей идентифицированного автотранспортного средства по отдельности в каждой серии измерений, могут суммировать для нахождения поосного веса или веса всего автотранспортного средства, проехавшего соответствующие взвешивающие устройства.
Еще одна особенность способа по настоящему изобретению состоит в том, что взвешивающие средства могут устанавливать на отрезках трассы, для которых протяженность, уклоны и неровности по высоте заданы изготовителями используемых взвешивающих устройств.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложена система для взвешивания автотранспортного средства непосредственно в процессе его движения по трассе, содержащая: взвешивающие устройства для поколесного или поосного взвешивания автотранспортного средства в движении, установленные на заранее заданных расстояниях на трассе; считывающие устройства, каждое из которых размещено вблизи соответствующего взвешивающего устройства и выполнено с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство, проезжающее через данное взвешивающее устройство, с одновременной фиксацией времени этого считывания; центр обработки данных, выполненный с возможностью: принимать показания каждого взвешивающего устройства при проезде по нему колеса или колес каждой из осей конкретного автотранспортного средства с одновременным считыванием по меньшей мере одной идентификационной метки этого автотранспортного средства соответствующим считывающим устройством и с фиксацией времени этого считывания; формировать серии измерений из показаний взвешивающих устройств, принятых в центре обработки данных, по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой; усреднять показания взвешивающих устройств в соответствующей серии измерений; и приравнивать показания взвешивающих устройств для автотранспортного средства с одной и той же идентификационной меткой, составляющие данную серию измерений, к усредненному значению в этой серии измерений.
Особенность системы по настоящему изобретению состоит в том, что центр обработки данных может содержать память для сохранения принятых показаний взвешивающих устройств вместе с соответствующими идентификационными метками.
Еще одна особенность способа по настоящему изобретению состоит в том, что центр обработки данных может быть выполнен с возможностью осуществлять следующие действия: формировать серии измерений из тех по меньшей мере двух показаний следующих друг за другом на трассе взвешивающих устройств для одних и тех же колес или осей идентифицированного автотранспортного средства, отклонения которых от их усредненного значения меньше заранее заданного порога; при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину меньше заранее заданного порога продолжать в данной серии измерений прием показаний и их усреднение; при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключать это показание из данной серии измерений; при отклонении следующего после исключенного показания от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключать и это показание из данной серии измерений и сравнивать его с предыдущим исключенным показанием; при наличии заранее заданного количества следующих подряд исключенных показаний, отклонение которых друг от друга меньше заранее заданного порога, завершать текущую серию измерений и начинать новую серию измерений с этих следующих подряд показаний, исключенных из данной серии измерений.
При этом заранее заданное количество следующих подряд исключенных показаний может быть равно двум или более.
Кроме того, центр обработки данных может быть выполнен с возможностью осуществлять следующие действия: если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в первом заранее заданном числе следующих подряд серий измерений, временно исключать показания этого взвешивающего устройства из последующих серий измерений, но продолжать их прием и сравнение в центре обработки данных; если затем показания этого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину меньше заранее заданного порога во втором заранее заданном числе следующих подряд серий измерений, отменять упомянутое временное исключение показаний этого взвешивающего устройства, начиная с очередной серии измерений, если и в этой серии измерений показание этого взвешивающего устройства отличается от усредненного значения предыдущих показаний на величину меньше заранее заданного порога; если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в третьем заранее заданном числе следующих подряд серий измерений, превышающем упомянутое первое заранее заданное число, прекращать прием показаний от этого взвешивающего устройства и фиксировать его неисправность.
Еще одна особенность системы по настоящему изобретению состоит в том, что заранее заданный порог может быть выбран не меньше разброса показаний самого неточного из используемых взвешивающих устройств.
Еще одна особенность системы по настоящему изобретению состоит в том, что центр обработки данных может быть выполнен с возможностью суммировать значения, полученные для всех колес или для всех осей идентифицированного автотранспортного средства по отдельности в каждой серии измерений для нахождения поосного веса или веса всего автотранспортного средства.
Еще одна особенность системы по настоящему изобретению состоит в том, что взвешивающие устройства могут быть установлены на отрезках трассы, для которых минимальный радиус поворота, уклон и неровности покрытия заданы исходя из паспортных требований используемых взвешивающих устройств.
Краткое описание чертежей
Изобретение иллюстрируется далее чертежами.
На фиг.1 показана условная схема системы, в которой реализуется способ по настоящему изобретению.
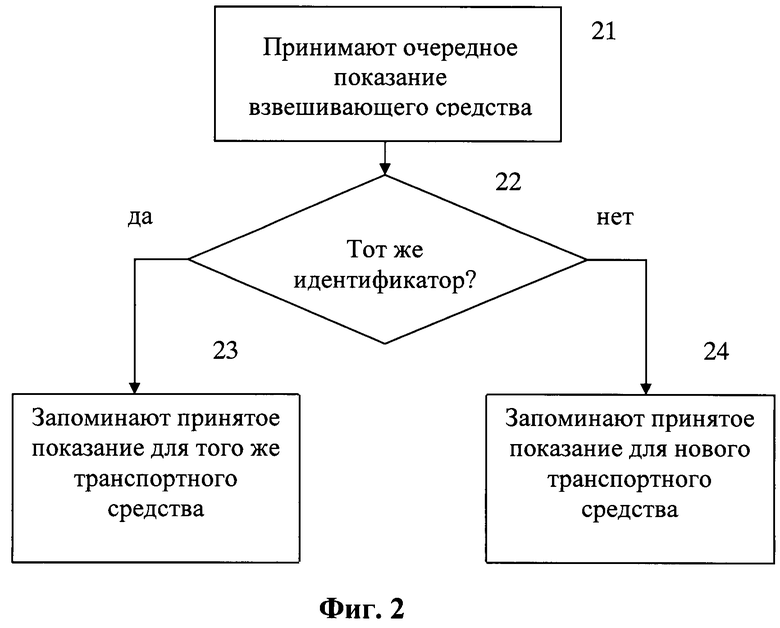
На фиг.2 приведена блок-схема алгоритма снятия показаний при проезде нескольких осей взвешивающего устройства.
На фиг.3 приведена блок-схема алгоритма усреднения показаний в соответствии с настоящим изобретением.
Подробное описание изобретения
Как показано на фиг.1, способ по настоящему изобретению может быть реализован в системе, в которой на трассе 1 (условно показанной односторонней с направлением движения по стрелке 2) установлены взвешивающие устройства 3.i (i=1, 2, …). На фиг.1 показаны четыре взвешивающих устройства 3.1-3.4, однако их число, разумеется, не ограничено именно четырьмя. Эти взвешивающие устройства 3.i предназначены для взвешивания автотранспортных средств, проезжающих по трассе 1 в направлении 2. В качестве таких взвешивающих устройств можно использовать любые известные в настоящее время или разрабатываемые в будущем весовые датчики WIM. Например, это могут быть датчики, используемые в упомянутых выше средствах взвешивания чешской компании Cross; либо оптоволоконные датчики, описанные в патенте РФ на полезную модель №13925 (опубл. 10.06.2000), в патентах США №4560016 (опубл. 24.12.1985) и №5260520 (опубл. 09.11.1993), в заявке Великобритании №2250813 (опубл. 17.06.1992) или в заявке Кореи №2004/0102878 (опубл. 08.12.2004); либо в качестве таких датчиков могут использоваться тензодатчики, описанные в патентах РФ №2239798 (опубл. 10.11.2004) и №2390734 (опубл. 27.05.2010) или в заявке Кореи №2008/0105371 (опубл. 04.12.2008). В принципе, конкретная конструкция взвешивающих устройств 3 не имеет значения, и не важно, изготовлены ли все они одинаковыми или по разным технологиям.
Взвешивающие устройства 3, как правило, укладываются в дорожное полотно трассы 1 в каждой полосе движения поперек направления 2 движения автотранспортных средств. Такое размещение взвешивающих устройств 3 позволяет измерять вес автомобиля, проезжающего через каждое взвешивающее устройство 3, поосно. Если же требуется определять вес поколесно, каждое взвешивающее устройство 3 разделяют на две части, как это описано, например, в упомянутом выше патенте РФ №2390734. Целесообразно устанавливать взвешивающие устройства 3 там, где скорость автотранспортного средства ожидается неизменной, т.е. на относительно прямых отрезках трассы 1, имеющих радиус поворота (закругления), неровности по высоте и уклоны не больше заранее заданных величин. Обычно радиусы закругления таких отрезков, их уклоны и неровности по высоте, а возможно и некоторые иные параметры нормируются (паспортизируются) изготовителями используемых взвешивающих устройств. Взвешивающие устройства 3 устанавливают на трассе 1 на заранее заданных расстояниях, которые, как видно на фиг.1, не обязательно являются одинаковыми. Понятно, что чем чаще расположены взвешивающие устройства 3 на трассе 1, тем легче контролировать не только вес, но и передвижение автотранспортного средства, но при этом возрастает стоимость используемой системы и сложность управления ею.
Как видно на фиг.1, вблизи каждого из взвешивающих устройств 3.i размещают считывающее устройство 4 л. Каждое такое считывающее устройство 4 выполнено с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство. Такими идентификационными метками могут быть как государственные регистрационные номера, так и, к примеру, радиоидентификационные метки (радиоидентификаторы, RFID), закрепляемые на автотранспортных средствах. При этом считывающее устройство 4 представляет собой, например, видеокамеру и (или) считыватель, выполнение которого позволяет считывать используемые идентификационные метки. При проезде автомобиля через конкретное взвешивающее устройство 3.i расположенное рядом считывающее устройство 4 л одновременно осуществляет фиксацию времени считывания. Например, при использовании видеокамер в качестве считывающих устройств 4 такая фиксация времени осуществляется автоматически.
Сигналы с взвешивающих устройств 3 и считывающих устройств 4 передаются в центр 5 обработки данных. Такая передача может осуществляться как по проводам, так и беспроводно любыми известными в настоящее время или разрабатываемыми в будущем средствами. Центр 5 обработки данных может объединять взвешивающие устройства 3 и считывающие устройства 4 в локальную сеть, в которой для передачи сигналов используется соответствующий протокол. Конкретный метод обмена данными между взвешивающими устройствами 3, считывающими устройствами 4 и центром 5 обработки данных не имеет значения.
Центр 5 обработки данных, как понятно из его названия, осуществляет необходимую обработку данных с помощью соответственно запрограммированного процессорного средства (компьютер, контроллер и т.п.) и имеет память для хранения - хотя бы временного - данных, принятых от взвешивающих устройств 3 и считывающих устройств 4, и для хранения данных, полученных в результате обработки принятых данных.
На фиг.2 приведена блок-схема алгоритма начальной обработки данных, принимаемых от взвешивающих устройств 3 и считывающих устройств 4 в центре 5 обработки данных. При проезде некоторого автотранспортного средства через взвешивающее устройство 3.i (пусть это будет для определенности первое слева на фиг.1 взвешивающее устройство 3.1) датчик этого взвешивающего устройства 3.1 формирует сначала сигнал, пропорциональный весу передней оси проезжающего автотранспортного средства. Одновременно расположенное рядом первое считывающее устройство 4.1 регистрирует соответствующую(-ие) идентификационную(-е) метку(-и), которой(-ми) снабжено данное автотранспортное средство. Полученные данные поступают в центр 5 обработки данных, который на этапе 21 принимает очередное показание взвешивающего устройства 3.1. Одновременно центр 5 обработки данных принимает и сигнал со считывающего устройства 4.1 и распознает идентификатор проезжающего автотранспортного средства. К примеру, процессор в центре 1 обработки данных распознает государственный регистрационный номер и (или) устанавливает иной идентификатор, присвоенный данному автомобилю. При проезде через первое взвешивающее устройство 3.1 второй оси того же автомобиля центр 5 обработки данных принимает следующее показание взвешивающего устройства 3.1, но при этом идентификатор, считанный первым считывающим устройством 4.1, остается тем же самым (этап 22). Поэтому в центре 5 обработки данных запоминают новое показание взвешивающего устройства 3.1 вместе с предыдущим показанием и с одним и тем же идентификатором (этап 23). Если теперь вслед за проехавшим автомобилем (пусть это будет двухосная машина) на датчик первого взвешивающего устройства наезжает передняя ось другого автотранспортного средства, считывающее устройство 4.1 передаст в центр 5 обработки данных другие данные, отличные от ранее переданных данных. Процессор в центре 5 обработки данных распознает по этим данным другое автотранспортное средство и запомнит полученные при этом данные от взвешивающего устройства 3.1 вместе с другим идентификатором. Таким образом, данные от всех осей (или от всех колес) одного и того же автотранспортного средства будут записаны в память центра 5 обработки данных с одним и тем же идентификатором, но для разных автотранспортных средств эти идентификаторы будут различны.
В принципе, данный алгоритм может осуществляться и с помощью иных средств. Например, в дорожное полотно рядом с взвешивающим устройством 3 может быть встроена индукционная петля. Пока через данное взвешивающее устройство проезжают оси одного и того же транспортного средства (и даже оси его прицепа), в этой индукционной петле наводится электрический ток за счет перемещающейся массы данного автотранспортного средства. Но как только данный автомобиль проедет через взвешивающее устройство 3, ток в этой индукционной петле резко снизится, что может быть определено отдельной пороговой схемой. Наезд на взвешивающее устройство 3 другого автомобиля, даже едущего почти «впритык» к уже проехавшему, вызовет новое повышение тока в индукционной петле, которое также будет распознано соответствующей пороговой схемой (см. www.citylines.ru/telematica/obespechenie_bezopasnosty_14.html). Конкретные виды пороговых схем общеизвестны специалистам.
Как уже отмечалось, датчики взвешивающих устройств 3 имеют невысокую точность (в противном случае они резко удорожили бы систему), что не позволяет применять их для законного предъявления претензий по превышению веса на платных трассах. Точность показаний этих датчиков можно повысить, используя более точные весы и корректируя показания взвешивающих устройств 3 по показаниям этих точных весов для автотранспортного средства с тем(и) же самым(и) идентификатором(-ами). Однако это требует усложнения и удорожания используемой системы. Поэтому в настоящем изобретении осуществляется коррекция показаний взвешивающих устройств 3 за счет усреднения, выполняемого в центре 5 обработки данных, показаний для по меньшей мере некоторых из автотранспортных средств.
Как известно, точность статистических оценок можно существенно повысить при усреднении нескольких независимых случайных событий. Действительно, среднеквадратичное отклонение (как раз и характеризующее точность) для среднего по совокупности независимых величин обратно пропорционально корню квадратному из числа этих величин (Справочник по вероятностным расчетам. - М.: Воениздат, 1970. - С.297). Все взвешивающие устройства 3, очевидно, являются независимыми. Следовательно, при наличии двадцати пяти таких взвешивающих устройств 3 точность усредненной оценки повысится в пять раз, а при наличии ста таких взвешивающих устройств 3 точность усредненной оценки возрастет в десять раз.
Понятно, что коррекцию по усредненному значению можно осуществлять только по завершении усреднения, т.е. после того, как одно и то же автотранспортное средство проедет всю трассу 1 с установленными взвешивающими устройствами 3, никуда не сворачивая с этой трассы 1 и не меняя своего веса, т.е. без разгрузки или дозагрузки. Однако это изменение веса одного и того же автотранспортного средства несложно учесть, как показано в алгоритме, блок-схема которого приведена на фиг.3.
В общем случае, в центре 5 обработки данных из принятых показаний взвешивающих устройств 3 по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой формируют серии измерений. Как будет видно из дальнейшего, в эти серии измерений могут быть включены показания всех взвешивающих устройств 3. С другой стороны, в эти серии могут включаться только некоторые показания (показания некоторых взвешивающих устройств 3), как это описано далее со ссылкой на алгоритм по фиг.3. Отметим, что в центре 5 обработки данных можно производить запоминание показаний любых, в том числе и всех, взвешивающих устройств 3.
На первом этапе этого алгоритма (этап 31) принимают очередное показание от некоторого взвешивающего устройства 3.i (пусть для определенности это будет третье взвешивающее устройство 3.3 на фиг.1) для m-й оси n-го автотранспортного средства (где m=1, 2, …, а n - любое целое число). Поскольку показания принимаются последовательно, из них формируют серии измерений, которые, однако, не обязательно включают в себя все показания (показания всех взвешивающих устройств). Затем на этапе 32 это очередное принятое показание в сформированной к этому моменту серии измерений сравнивают с усредненным значением, найденным для той же самой m-й оси того же самого n-го автотранспортного средства в серии из предыдущих показаний, полученных взвешивающими устройствами 3.1 и 3.2 (т.е. при i<3 в данном примере). Если при этом сравнении отклонение сравниваемого (очередного) показания от уже имеющегося усредненного значения меньше заранее заданного порога («да» на этапе 33), то данное показание включают в эту же серию измерений для m-й оси n-го автотранспортного средства и усредняют все показания в этой серии (этап 34).
Величину заранее заданного порога выбирают исходя, по меньшей мере, из известной точности датчиков, используемых во взвешивающих устройствах 3. Например, заранее заданный порог могут выбирать не меньше разброса показаний самого неточного из используемых взвешивающих устройств 3. Т.е. в начале серии, после получения в центре 5 обработки данных очередного показания (показания от второго взвешивающего устройства 3.2) это показание сравнивается на этапе 32 с усредненным значением, которое на этот момент просто равно показанию первого взвешивающего устройства 3.1. И если это очередное показание отличается от усредненного значения (т.е. пока от предыдущего показания) на величину менее заранее заданного порога, то на этапе 34 усредняют уже оба принятых к этому времени показания - от взвешивающих устройств 3.1 и 3.2. Напомним, что в данной серии используют показания только для m-й оси n-го автотранспортного средства. После приема показания третьего взвешивающего устройства 3.3 и положительного результата проверки условия этапа 33 на этапе 34 осуществляют усреднение уже трех показаний, и т.д. Заметим, что после усреднения четырех показаний точность оценки полученных данных возрастает вдвое.
Если же на этапе 33 определено, что показание третьего взвешивающего устройства 3.3 отличается от усредненного по предыдущим показаниям значения на величину заранее заданного порога или более, это третье показание исключают из данной серии (этап 35) и сохраняют это исключенное значение отдельно от используемой серии для m-й оси n-го автотранспортного средства (этап 36). После этого на этапе 37 проверяют, сколько уже сделано исключений из данной серии. Если число этих исключений меньше заранее заданного количества, то продолжают обработку данных в той же серии показаний, т.е. принимают на этапе 38 следующее показание (показание следующего взвешивающего устройства 3.(i+1), в данном случае четвертого взвешивающего устройства 3.4) и повторяют этапы 32 и 33 сравнения и проверки отклонения от усредненного значения. Если это следующее - после одного исключенного - показание имеет отклонение от усредненного значения меньше заданного порога («да» на этапе 33), то обработка переходит к этапу 34, т.е. данная серия показаний продолжается.
Пусть заданное на этапе 37 число равно двум. Тогда, при двух подряд исключениях показаний, которые отклонились от усредненного значения на величину порога или более («нет» на этапе 37), проверяют, насколько эти исключенные показания отклоняются друг от друга. Если это отклонение меньше того же самого заранее заданного порога, то использовавшуюся ранее серию показаний завершают и начинают новую серию, в которую включают эти (два в данном случае) показания (этап 39). Понятно, что если число на этапе 37 выбрано равным трем, новую серию показаний для той же самой m-ой оси того же самого n-го автотранспортного средства начнут с трех подряд исключенных показаний (с исключенных показаний трех подряд идущих взвешивающих устройств 3).
Новая серия показаний с большой долей вероятности свидетельствует о том, что данное автотранспортное средство поменяло свою загрузку. Если же в центре 5 обработки данных при этом будет еще определено, что время, потраченное данным автотранспортным средством на проезд между двумя взвешивающими устройствами 3i и 3.i (i+1), показание одного из которых завершает одну серию, а показание другого начинает новую, с учетом известного расстояния между данными взвешивающими устройствами 3, свидетельствует о резком уменьшении скорости (возможной стоянке или временном съезде с трассы) данного автотранспортного средства, то это обстоятельство может послужить дополнительным подтверждением правильности перехода на новую серию показаний.
Полученные на этапе 34 усредненные значения в каждой серии измерений сохраняют в памяти центра 5 обработки данных в качестве показаний всех взвешивающих устройств 3 для автотранспортного средства с одной и той же идентификационной меткой в данной серии измерений. По этим усредненным значениям можно осуществлять коррекцию показаний всех или части взвешивающих устройств 3. Понятно, что чем больше показаний участвует в усреднении в одной серии, тем точнее полученные оценки. Указанная коррекция может осуществляться не для каждой серии показаний, а только для тех серий, в которых, например, не было исключений. Однако конкретный метод коррекции показаний выходит за рамки способа по настоящему изобретению.
Исключенные показания можно подвергать дополнительной обработке. Например, если показания некоторого (k-го) взвешивающего устройства 3.k отличаются от усредненного значения на величину не меньше заранее заданного порога в нескольких следующих подряд сериях измерений (назовем это количество подряд идущих исключений первым заранее заданным числом), то это может свидетельствовать о вероятном сбое в работе данного взвешивающего устройства. Поэтому показания этого взвешивающего устройства 3.k временно исключают из последующих серий измерений, но продолжают их прием и сравнение в центре 5 обработки данных. Если затем ситуация меняется, и в нескольких следующих подряд сериях измерений показания этого взвешивающего устройства 3.k отличаются от усредненного значения уже на величину меньше заранее заданного порога (назовем это количество подряд идущих сравнений в допустимых пределах вторым заранее заданным числом), то отменяют упомянутое временное исключение показаний этого взвешивающего устройства 3.k. Но если показания этого или любого иного взвешивающего устройства 3 отличаются от усредненного значения на величину не меньше заранее заданного порога в таком количестве следующих подряд серий измерений, которое больше некоторого заранее установленного числа (назовем это заранее установленное пороговое число третьим заранее заданным числом), то прекращают прием показаний от этого взвешивающего устройства и фиксируют его неисправность. К примеру, может быть принято, что первое заранее заданное число равно трем, второе заранее заданное число равно четырем, в третье заранее заданное число равно шести. Понятно, что третье заранее заданное число не может быть меньше первого заранее заданного числа, а в остальном конкретные величины первого, второго и третьего заранее заданных чисел могут определяться требованиями надежности работы рассматриваемой системы или иными соображениями, учитывающими как требования изготовителей, так и различные нормативные документы.
Поясним этот случай подробнее. Пусть имеется десять взвешивающих устройств 3, расположенных по трассе друг за другом. И пусть пятое из этих взвешивающих устройств 3.5 (данное взвешивающее устройство не показано на фиг.1, и ссылочная позиция 3.5 дается далее только для лучшего понимания рассматриваемого примера) выдает показания, которые отличаются от усредненного значения на величину больше заранее заданного порога. Тогда для первого же проезжающего по нему двухосного автомобиля показание этого взвешивающего устройства 3.5 будет исключено из каждой серии измерений для этого автомобиля. Такое же исключение будет и для первой оси следующего автомобиля. Т.е. получится три серии измерений, в которых показания пятого взвешивающего устройства 3.5 исключены. Примем, что первое заранее заданное число равно трем. Тогда показания пятого взвешивающего устройства 3.5 после проезда по нему первой оси следующего автомобиля временно исключаются из всех последующих серий измерений, т.е. из серий для всех оставшихся осей этого следующего (второго) автомобиля и всех последующих автомобилей.
Если после проезда обеих осей второго автомобиля (т.е. количество «плохих» показаний равно четырем, что превышает первое заранее заданное число) пятое взвешивающее устройство 3.5 вдруг начинает давать «хорошие» показания, и это повторяется для двух двухосных едущих друг за другом автомобилей, т.е. отклонения его показаний от усредненного значения четырежды оказываются меньше заранее заданного порога, то для первой же оси еще одного автомобиля показания пятого взвешивающего устройства 3.5 снова включаются в серии измерений. Здесь второе заранее заданное число принято равным четырем.
Но если после трех подряд больших отклонений пятого взвешивающего устройства 3.5 они продолжатся и дальше, и наберется, скажем, шесть таких подряд идущих серий измерений (т.е. для первого и еще двух двухосных автомобилей, едущих за первым), то пятое взвешивающее устройство 3.5 вообще исключается из работы. Здесь третье заранее заданное число равно шести.
Из этого примера видно, что третье заранее заданное число никак не зависит от второго заранее заданного числа, но больше первого заранее заданного числа. С учетом этого условия все эти три заранее заданных числа могут быть выбраны любыми.
Описанное выше приравнивание показаний взвешивающих устройств 3 к усредненному значению можно осуществлять не для каждого автотранспортного средства. Например, если у какого-то автотранспортного средства лопнуло колесо, то при его проезде по взвешивающим устройствам каждое показание непредсказуемо отличается как от остальных показаний в этой же серии, так и от реального значения для данного колеса или данной оси. Тогда в центре 5 обработки данных за счет сравнения всех показаний данной серии друг с другом и определения большого количества отклонений от усредненного значения, превышающих заранее заданный порог, можно определить, что в данной серии измерений коррекция показаний невозможна. При этом может быть также принято решение остановить данный автомобиль для проверки его исправности.
Специалисту понятно, что в случае поколесного измерения веса взвешивающими устройствами 3 приведенные на фиг.2 и 3 блок-схемы алгоритмов практически не изменятся, только место конкретных осей заменят конкретные колеса, а число показаний и число серий показаний удвоится (даже при наличии сдвоенных колес с каждой стороны одной оси соответствующее взвешивающее устройство 3 будет определять суммарное давление от обоих этих колес).
Можно также отметить, что способ по настоящему изобретению позволяет находить поосный вес или вес всего автотранспортного средства путем суммирования усредненных значений, полученных для всех колес или для всех осей идентифицированного автотранспортного средства по отдельности в каждой серии измерений.
При необходимости начисления платежей за провоз по трассе 1 определенного груза на определенное расстояние (что обычно исчисляется в единицах тонна·км), для достижения максимальной точности можно использовать показания всех взвешивающих устройств 3 (расстояния между которыми известны заранее), через которые проехало представляющее интерес автотранспортное средство, с коррекцией этих показаний путем приравнивания их к усредненным значениям. Время же прохождения известного расстояния между взвешивающими устройствами можно учитывать для фиксации факта изменения загрузки автотранспортного средства.
Сохраненные в памяти центра 5 обработки данных принятые, т.е. исходные, нескорректированные показания взвешивающих устройств 3 с соответствующими идентификационными метками можно использовать для последующего анализа дорожной обстановки и т.п.
Таким образом, способ и система по настоящему изобретению позволяют существенно повысить точность измерений всех весовых датчиков, установленных на трассе, без использования отдельных точных весов, и тем самым снизить стоимость используемого оборудования.
Настоящее изобретение описано выше посредством примеров своего осуществления, которые являются чисто иллюстративными, но ни в коем случае не ограничивающими объем данного изобретения, который определяется приложенной формулой изобретения с учетом ее эквивалентов.

Изобретение относится к весоизмерительной технике и направлено на снижение стоимости используемого оборудования при одновременном повышении точности измерений всех весовых датчиков, установленных на трассе. Этот результат обеспечивается за счет того, что устанавливают на трассе взвешивающие устройства для поколесного или поосного взвешивания автотранспортных средств, размещают вблизи каждого из взвешивающих устройств считывающее устройство для считывания идентификационной метки автотранспортного средства с одновременной фиксацией времени этого считывания, в центре обработки данных принимают показание каждого взвешивающего устройства при проезде по нему колеса или колес каждой из осей конкретного автотранспортного средства с одновременным считыванием по меньшей мере одной идентификационной метки этого автотранспортного средства соответствующим считывающим устройством и с фиксацией времени этого считывания. Затем формируют серии измерений из показаний взвешивающих устройств, принятых в центре обработки данных, по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой, усредняют показания взвешивающих устройств в соответствующей серии измерений и приравнивают показания взвешивающих устройств для автотранспортного средства с одной и той же идентификационной меткой, составляющие данную серию измерений, к усредненному значению в этой серии измерений. 2 н. и 14 з.п. ф-лы, 3 ил.
1. Способ взвешивания автотранспортного средства непосредственно в процессе его движения по трассе, заключающийся в том, что:
- устанавливают на трассе взвешивающие устройства для поколесного или поосного взвешивания автотранспортных средств;
- размещают вблизи каждого из взвешивающих устройств считывающее устройство, выполненное с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство, проезжающее через данное взвешивающее устройство, с одновременной фиксацией времени этого считывания;
- принимают в центре обработки данных показание каждого взвешивающего устройства при проезде по нему колеса или колес каждой из осей конкретного автотранспортного средства с одновременным считыванием по меньшей мере одной идентификационной метки этого автотранспортного средства соответствующим считывающим устройством и с фиксацией времени этого считывания;
- формируют серии измерений из показаний взвешивающих устройств, принятых в центре обработки данных, по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой;
- усредняют показания взвешивающих устройств в соответствующей серии измерений и
- приравнивают показания взвешивающих устройств для автотранспортного средства с одной и той же идентификационной меткой, составляющие данную серию измерений, к усредненному значению в этой серии измерений.
2. Способ по п.1, в котором сохраняют в памяти центра обработки данных принятые показания взвешивающих устройств вместе с соответствующими идентификационными метками.
3. Способ по п.1, в котором осуществляют в каждой серии измерений следующие действия:
- формируют серии измерений из тех по меньшей мере двух показаний следующих друг за другом на упомянутой трассе взвешивающих устройств для одних и тех же колес или осей идентифицированного автотранспортного средства, отклонения которых от их усредненного значения меньше заранее заданного порога;
- при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину меньше заранее заданного порога продолжают в данной серии измерений прием показаний и их усреднение;
- при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключают это показание из данной серии измерений;
- при отклонении следующего после исключенного показания от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключают это показание из данной серии измерений и сравнивают его с предыдущим исключенным показанием;
- при наличии заранее заданного количества следующих подряд исключенных показаний, отклонение которых друг от друга меньше заранее заданного порога, завершают текущую серию измерений и начинают новую серию измерений с этих следующих подряд показаний, исключенных из данной серии измерений.
4. Способ по п.3, в котором упомянутое заранее заданное количество следующих подряд исключенных показаний равно двум или более.
5. Способ по п.3, в котором:
- если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в первом заранее заданном числе следующих подряд серий измерений, то временно исключают показания этого взвешивающего устройства из последующих серий измерений, но продолжают их прием и сравнение в центре обработки данных;
- если затем показания этого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину меньше заранее заданного порога во втором заранее заданном числе следующих подряд серий измерений, то отменяют упомянутое временное исключение показаний этого взвешивающего устройства, начиная с очередной серии измерений, если и в этой серии измерений показание этого взвешивающего устройства отличается от усредненного значения предыдущих показаний на величину меньше заранее заданного порога;
- если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в третьем заранее заданном числе следующих подряд серий измерений, превышающем упомянутое первое заранее заданное число, то прекращают прием показаний от этого взвешивающего устройства и фиксируют его неисправность.
6. Способ по п.1, в котором упомянутый заранее заданный порог выбирают не меньше разброса показаний самого неточного из используемых взвешивающих устройств.
7. Способ по п.1, в котором суммируют усредненные значения, полученные для всех колес или для всех осей идентифицированного автотранспортного средства по отдельности в каждой серии измерений для нахождения поосного веса или веса всего автотранспортного средства, проехавшего соответствующие взвешивающие устройства.
8. Способ по п.1, в котором упомянутые взвешивающие устройства устанавливают на отрезках трассы, для которых минимальный радиус поворота, уклон и неровности покрытия задают, исходя из паспортных требований используемых взвешивающих устройств.
9. Система для взвешивания автотранспортного средства непосредственно в процессе его движения по трассе, содержащая:
- установленные на трассе взвешивающие устройства для поколесного или поосного взвешивания автотранспортного средства в движении;
- считывающие устройства, каждое из которых размещено вблизи соответствующего взвешивающего устройства и выполнено с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство, проезжающее через данное взвешивающее устройство, с одновременной фиксацией времени этого считывания;
- центр обработки данных, выполненный с возможностью:
- принимать показание каждого взвешивающего устройства при проезде по нему колеса или колес каждой из осей конкретного автотранспортного средства с одновременным считыванием по меньшей мере одной идентификационной метки этого автотранспортного средства соответствующим считывающим устройством и с фиксацией времени этого считывания;
- формировать серии измерений из показаний взвешивающих устройств, принятых в центре обработки данных, по отдельности для каждого колеса или для каждой оси автотранспортного средства с одной и той же идентификационной меткой;
- усреднять показания взвешивающих устройств в соответствующей серии измерений и
- приравнивать показания взвешивающих устройств для автотранспортного средства с одной и той же идентификационной меткой, составляющие данную серию измерений, к усредненному значению в этой серии измерений.
10. Система по п.9, в которой центр обработки данных содержит память для сохранения принятых показаний взвешивающих устройств вместе с соответствующими идентификационными метками.
11. Система по п.9, в которой центр обработки данных выполнен с возможностью осуществлять следующие действия:
- формировать серии измерений из тех по меньшей мере двух показаний следующих друг за другом на упомянутой трассе взвешивающих устройств для одних и тех же колес или осей идентифицированного автотранспортного средства, отклонения которых от их усредненного значения меньше заранее заданного порога;
- при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину меньше заранее заданного порога продолжать в данной серии измерений прием показаний и их усреднение;
- при отклонении очередного показания в серии измерений от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключать это показание из данной серии измерений;
- при отклонении следующего после исключенного показания от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога исключать и это показание из данной серии измерений и сравнивать его с предыдущим исключенным показанием;
- при наличии заранее заданного количества следующих подряд исключенных показаний, отклонение которых друг от друга меньше заранее заданного порога, завершать текущую серию измерений и начинать новую серию измерений с этих следующих подряд показаний, исключенных из данной серии измерений.
12. Система по п.11, в которой упомянутое заранее заданное количество следующих подряд исключенных показаний равно двум или более.
13. Система по п.9, в которой центр обработки данных выполнен с возможностью осуществлять следующие действия:
- если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в первом заранее заданном числе следующих подряд серий измерений, временно исключать показания этого взвешивающего устройства из последующих серий измерений, но продолжать их прием и сравнение в центре обработки данных;
- если затем показания этого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину меньше заранее заданного порога во втором заранее заданном числе следующих подряд серий измерений, отменять упомянутое временное исключение показаний этого взвешивающего устройства, начиная с очередной серии измерений, если и в этой серии измерений показание этого взвешивающего устройства отличается от усредненного значения предыдущих показаний на величину меньше заранее заданного порога;
- если показания некоторого взвешивающего устройства отличаются от усредненного значения предыдущих показаний на величину не меньше заранее заданного порога в третьем заранее заданном числе следующих подряд серий измерений, превышающем упомянутое первое заранее заданное число, прекращать прием показаний от этого взвешивающего устройства и фиксировать его неисправность.
14. Система по п.9, в которой упомянутый заранее заданный порог выбран не меньше разброса показаний самого неточного из используемых взвешивающих устройств.
15. Система по п.9, в которой центр обработки данных выполнен с возможностью суммировать усредненные значения, полученные для всех колес или для всех осей идентифицированного автотранспортного средства по отдельности в каждой серии измерений для нахождения поосного веса или веса всего автотранспортного средства, проехавшего соответствующие взвешивающие устройства.
16. Система по п.9, в которой упомянутые взвешивающие устройства установлены на отрезках трассы, для которых минимальный радиус поворота, уклон и неровности покрытия заданы, исходя из паспортных требований используемых взвешивающих устройств.
| US 7684946 A1, 23.03.2010 | |||
| JP 2006226812 A, 31.08.2006 | |||
| JP 2010203954 A, 16.09.2010 | |||
| JP 2010216828 A, 30.09.2010 | |||
| JP 2006349636 A, 28.12.2006 | |||
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |

