Изобретение относится к весоизмерительной технике и может использоваться в промышленности, сельском хозяйстве и на транспорте для взвешивания автомобилей в движении.
Известен способ взвешивания быстродвижущихся объектов, заключающийся в том, что сигнал весового устройства преобразуют в электрический и усредняют его во времени, при этом определяют среднее значение четырех интегральных сумм одинаковой длительности, равной величине порядка длительности одного периода колебаний вблизи первой границы частотного диапазона подавляемых помех, смещают начальную точку интегрирования каждой интегральной на половину периода колебаний вблизи второй границы указанного диапазона и смещают начало интегральных сумм на полпериода колебаний, лежащего в середине частотного диапазона [1].
Недостатки известного способа, развитые авторами в последующих заявках [2] до 16 и более интегралов, заключаются в том, что предположение о неизменном спектре помех при взвешивании объектов не соответствует реальности. На самом деле каждый тип объекта имеет уникальный спектр помех, более того этот спектр изменяется зимой и летом (различная жесткость пути, покрытия), зависит от неровностей пути и весов, от рывков и торможений водителя, т.е. имеет нестационарный характер. Способ в свое время был реализован в приборе (Ф 4231), формирующем благодаря последовательному подключению интегралов т.н. “весовую функцию” многоступенчатого колоколообразного вида. При работе с этим приборам были зафиксированы грубые ошибки (до 5% и более) в тех случаях, когда после начала очередного цикла измерения происходили рывки или торможения объекта. Это позволяет утверждать, что способ не только не защищен от нестационарных помех, но и усиливает их влияние, если они случайно возникают в середине (на вершине “весовой функции”) цикла измерения.
Известен также, принятый за аналог, способ взвешивания движущихся объектов путем интегрирования сигнала датчика веса в заданные одинаковые интервалы времени, сравнения смежных значений, причем при сравнении запоминают значения измеренной величины перед каждым изменением знака приращения измеряемой величины, а за окончательный результат принимают среднее арифметическое запомненных результатов [3].
Недостатками аналога являются использование путевых датчиков для определения начала и конца промежутка измерения и недостаточная точность в реальных производственных условиях.
Датчики, определяющие начало и конец промежутка измерения, как показывает опыт эксплуатации, обычно являются самыми ненадежными элементами системы взвешивания, т.к. работают в условиях воздействия механических и метеорологических воздействий.
Недостаточная точность аналога обусловлена его алгоритмом, предназначенным для подавления гармонических помех и не защищенном от нестационарных помех. В реальных условиях в процессе взвешивания вследствие неровностей пути, рывков и притормаживают автомобиля, являющихся причинами нестационарных помех для измеряемого сигнала, результат взвешивания может быть серьезно искажен.
Например, притормаживание автомобиля приводит к сильным колебаниям подрессоренной части автомобиля вследствие резкого изменения кинетической энергии объекта, что вызывает в измеряемом сигнале кратковременный пакет интенсивных колебаний, частота которых отлична от частоты гармонической помехи, присущей данному объекту при слабых возмущениях.
Неровности пути в зависимости от их величины и протяженности как бы модулируют измеряемый сигнал или серьезно искажают его.
От всех этих помех, составляющих суть динамического взвешивания, его главные отличия от статического взвешивания, аналог совершенно не защищен.
Задачей, на решение которой направлено изобретение, является необходимость иметь простую и компактную конструкцию для поэлементного взвешивания автомобилей. Огромное количество типов автомобилей вызывает к жизни чрезмерное количество типоразмеров автомобильных весов. Например, фирма МЕТТЛЕР ТОЛЕДО выпускает более 45 типов с длиной платформы до 50 метров (4). Эти весы изготавливают по материалоемкой технологии, с большими нетранспортабельными платформами. В то же время существующие поосные или поэлементные весы имеют незначительное применение из-за невысокой точности.
Таким образом, в народном хозяйстве объективно существует потребность в компактных автомобильных весах, в которых идентификация автомобилей или их элементов (одиночные оси, мосты, двойные мосты и т.д.), а также промежутков измерения производилась бы без каких-либо датчиков, только с использованием измеряемого сигнала, а точность измерения была бы близкой к точности автомобильных весов для статического взвешивания.
Технический результат достигается за счет того, что при предлагаемом выборе длины платформы оказалось возможным надежно идентифицировать элементы (оси, мосты) практически всех типов автомобилей и, значит, осуществлять их взвешивание автоматически, без активного участия оператора на компактных балочных весах.
Точность взвешивания повышается благодаря обработке измеряемого сигнала, адаптивной к возникающим нестационарным помехам.
Существенность технического решения заключается в том, что способ поэлементного взвешивания автомобилей, включающий их перемещение по весам, измерение быстродействующим АЦП и запоминание показаний d1, d2...dn нагрузки на весы при наезде на весы одиночных осей и мостов автомобилей, определение веса осей и мостов как среднего значения показаний d1, d2…dn, a веса автомобиля как суммы весов всех его одиночных осей и мостов дополняют тем, что длину платформы L весов выбирают по формуле L=К·Мт, где К-технологический коэффициент, варьируемый от 1,2 до 4,0; Мт - межосевое расстояние в двухосных мостах взвешиваемых автомобилей, а одиночные оси и мосты автомобилей идентифицируют по диаграммам нагружения - разгружения.
Кроме того, грузоприемную платформу весов выполняют в виде двух балок, которые одним концом консольно заделывают в полотно подъездного пути, а другим - опирают на силоизмерительные датчики, причем консольные заделы и датчики располагают центрально - симметрично.
Наконец, при проезде осей и мостов показания d1, d2...dn запоминают, начиная с первого максимума после наезда и заканчивая последним максимумом перед выездом, а определение веса осей и мостов производят раздельно по участкам от максимума до максимума, получают частные результаты Al, A2... An, из числа которых по известным методикам исключают выбросы, а по оставшимся - находят среднее значение веса оси или моста.
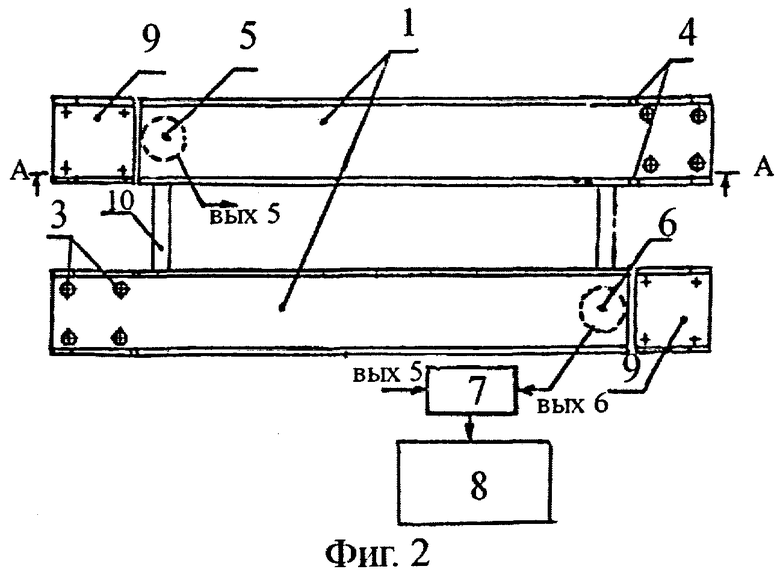
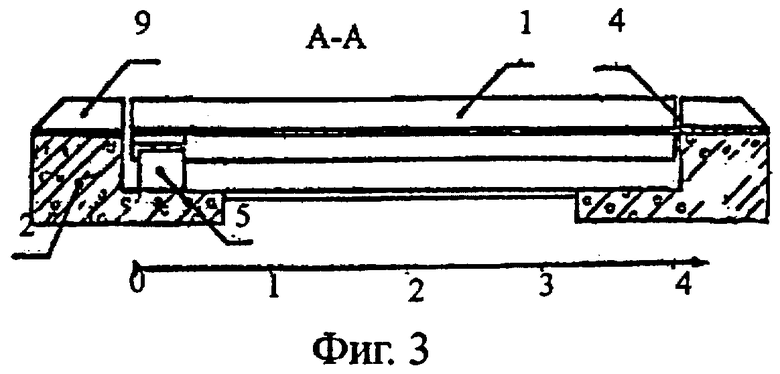
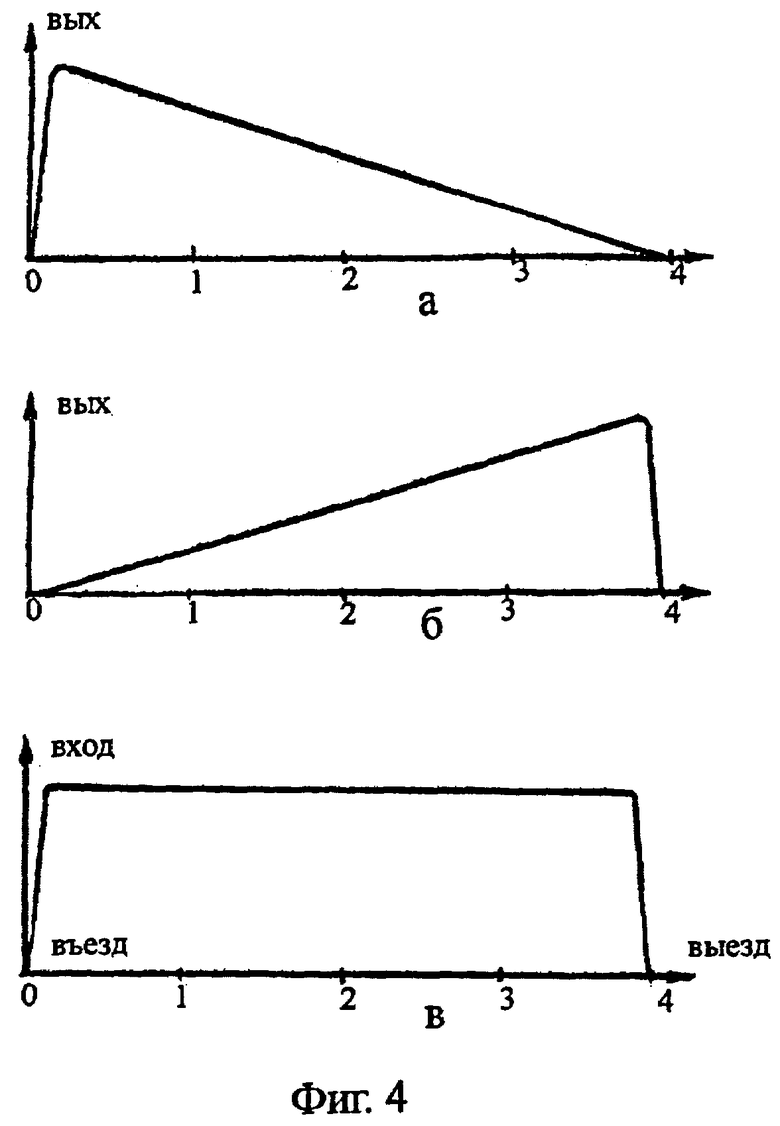
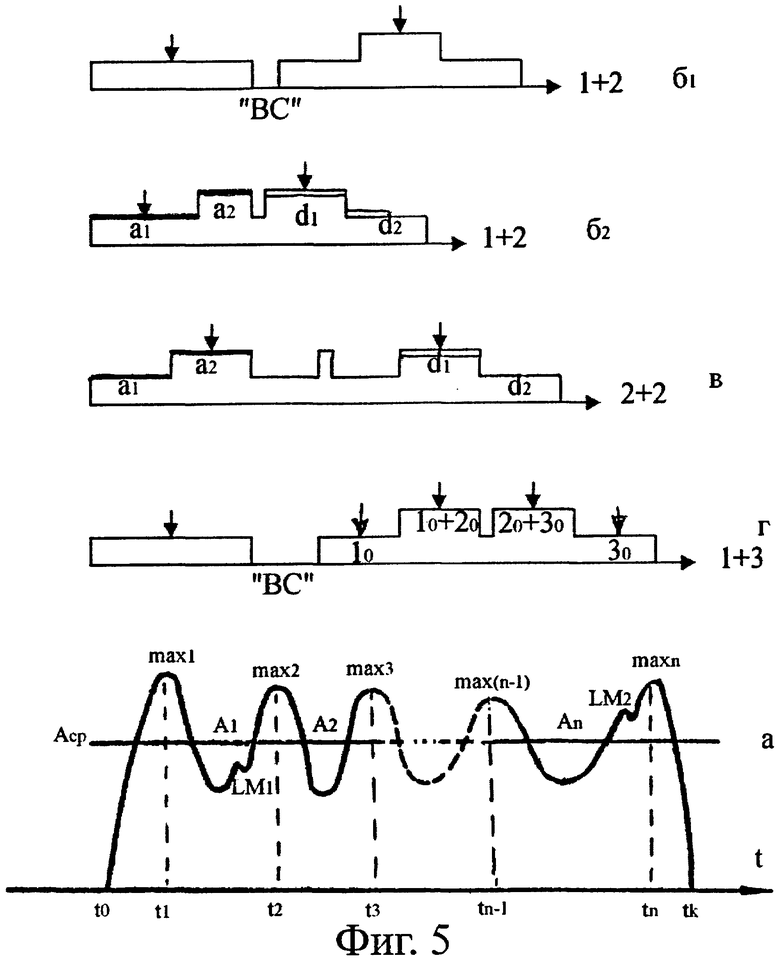
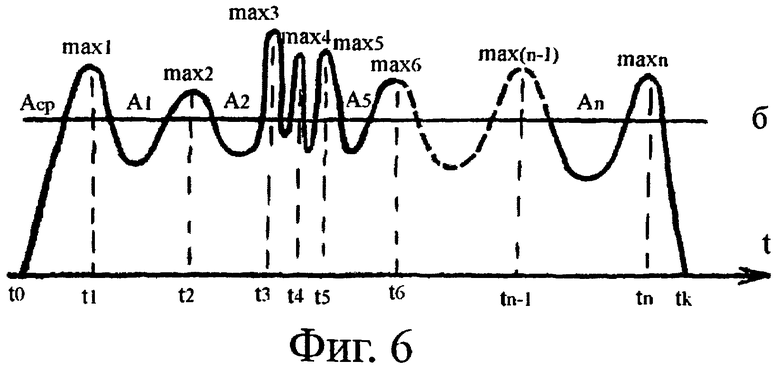
На фиг.1 схематично изображены объекты, с которыми оперирует способ; на фиг.2 - блочная схема устройства, реализующего способ с весами в плане; на фиг.3 - используемые весы приведены в разрезе; фиг.4 представляет эпюры, поясняющие работу весов; фиг.5 содержит диаграммы нагружения - разгружения, возникающие при проезде автомобилей, показанных на фиг.1, по весам; фиг.6 поясняет принцип обработки измерительного сигнала.
При всем многообразии типов автомобилей существенные отличия в рамках данного способа имеют четыре типа. Это двухосные объекты (фиг.1а), куда относятся автомобили марок Зил, Газ, Камаз, Краз, Урал и др. с базовым расстоянием Б от 3,5 до 6,1 метра. Трехосные объекты (фиг.1б) в общем тех же фирм имеют мосты с расстоянием Мт от 1,25 до 1,4 метра и с расстоянием Б от 1,5 до 3,5 метра. Объекты с осевой формулой (2+2, фиг.1в) - автомобили Урал и самосвалы - имеют межосевые расстояния в мостах 1,4 метра и расстояние Б около 2,75 - 2,9 метра. Объекты с осевой формулой (1+3, фиг.1г) также имеют стандартные межосевые расстояния 1,4 метра. Различные вариации этих комбинаций, прицепы и полуприцепы, автопоезда не представляют затруднений для реализации способа, т.к. отделены друг от друга и поэтому без труда распознаются и взвешиваются. Таким образом, способ устанавливает согласно формуле ограничения для длины весов L от 1,5 до 5,6 метра. Все диаграммы нагружения - разгружения на фиг,5 показаны для весов длиной L=2,7 метра.
Устройство, реализующее способ (фиг.2), содержит, например, весы, состоящие из балок 1 (например, двутавровых высотой - для весов шириной - около 800 мм), консольно закрепленных на фундамент 2 (фиг.3) анкерными болтами 3. Балки 1 имеют пропилы 4 полок и опираются свободными концами на тензодатчики 5 и 6 (например, типа М70 фирмы Тензо-М), выходы которых вых.5 и вых.6 подсоединены к измерительному преобразователю 7 (например, типа Микросим 0801 фирмы Метра), в свою очередь через стандартный интерфейс (например, RS-485) связанному с персональным компьютером 8 (например, Pentium). Из соображений дизайна конструкция весов дополнена въездными вставками 9, с весами в общем несвязанными. Балки 1 соединены между собой струнками-упорами 10.
На фиг.3 весы показаны в разрезе; на фиг.4 даны эпюры выходного сигнала тензодатчиков 5 (фиг.4а) и 6 (фиг.4в) при проезде взвешиваемого объекта по весам слева направо в соответствии с фиг.2. Заметим, что пропилы 4, выполненные в балках 1, сообщают им свойства весовых струнок, так что приложенное в любом сечении балок 1 усилие воспринимается тензодатчиками 5, 6 одинаково. Результирующий сигнал на входе измерительного преобразователя 7 приведен на фиг.4в (без учета динамических помех).
На фиг.5 приведены в относительном масштабе диаграммы нагружения-разгружения весов с длиной платформы L=2,7 метра объектами, показанными на фиг.1. Поясним с их помощью возможность осуществления способа.
Сначала несколько общих пояснений. Если в диаграмме появляется (фиг.5, поз. б1 и г) признак “ВС- весы свободны”, т.е. если какие-то межосевые расстояния в объекте больше 2,7 метра, и весы во время взвешивания объекта освобождаются от нагрузки, распознавание левой и правой частей диаграммы производится отдельно.
Алгоритм распознавания, записанный в памяти персонального компьютера 8, сводится к следующим положениям:
- если вслед за наездом следует выезд оси - результат взвешивания регистрируется как вес оси объекта;
- если вслед за двумя подряд наездами следует подряд два выезда оси и признак “ВС” - результат взвешивания после второго наезда регистрируется как вес моста объекта, остальные результаты погашаются;
- если вслед за двумя подряд наездами следует выезд, а затем до появления признака “ВС” чередуются наезды и выезды (более 2-х наездов при длине весов 2,7 метра не бывает), подсчитывается общее количество наездов, чем определяется осность объекта. Далее определяется, что въехало на весы вначале: одиночная ось (как на фиг.5, поз. б2) или мост (как на фиг.5, поз. в). При въезде моста площадки диаграммы а1 и а2 практически одинаковы по продолжительности, а при въезде одиночной оси - площадка а1 для всех типов автомобилей продолжительней площадки а2. На выезде с весов участки диаграммы д1 и д2 одинаковы, т.к. в обоих случаях выезжают мосты.
Особый (достаточно редкий) случай представляет взвешивание 3-осного моста (фиг.5, поз.г), где на весы наезжает вначале первая ось 1о, затем 1о и 2о, затем 2о и 3о, последней съезжает третья ось. Алгоритм взвешивания здесь состоит во взвешивании на всех четырех позициях с последующим вычислением полусуммы всех результатов, которая и будет весом трехосного моста, т.к. каждая из трех осей взвешивается дважды. Заметим, что площадки поз. г - 1о, 1о+2о, 2о+3о и 3о - практически одинаковы по продолжительности и по признакам с наездом на мост (поз.в) и выездом с моста (все позиции).
Заметим также, что выбранная длина весов - 2,7 метра - предоставляет всем участкам диаграмм фиг.5, которые попадают в результаты веса осей или мостов (на фиг.5 они помечены стрелками над площадками), максимальные протяженности - не менее 1,3 метра проезда по весам - и соответственно достаточное время для измерения.
Теперь с помощью фиг.5 и 6 подробнее покажем процесс обработки сигнала. Пусть на весы в момент времени t0 (фиг.6а) въезжает объект с осевой формулой (1+2) по поз.б1. Преобразователь 7 после исчезновения сигнала “Весы свободны” начинает с частотой около 500 Гц измерять сигнал тензодатчиков 5, 6 и передавать измеренные показания в компьютер 8, который, сравнивая поступающие показания, находит первый максимум max1. Все показания в проме-жутке (t0 - t1) компьютер 8 погашает, а показание, соответствующее первому максимуму max1, становится первым в промежутке (t1-tn), заканчивающемся после определения maxn, после чего преобразователь 7 измеряет показания в промежутке (tn-tк), передает их в компьютер 8, который по достижении близких к нулевым показаний (формируется сигнал “Весы свободны”) погашает их вместе показанием maxn.
После этого компьютер 8 подсчитывает среднее Аср всех показаний в интервале (t1-tn), определяет максимумы и исключает т.н. "ложные максимумы и минимумы", т.е. максимумы, меньшие Аср (см. поз.LMl), и минимумы, большие Аср (см. поз.LM2). По нашему определению максимумы должны быть больше Аср, а минимумы - меньше Аср, причем максимумы и минимумы должны чередоваться. Ложные максимумы и минимумы появляются на измеряемом сигнале при сравнительно небольших по величине возмущениях различного рода из ранее упомянутых.
После установления того факта, что максимум LM1 - ложный, все показания справа от LM1 присоединяются к промежутку (max1-max2).
Ложный минимум LM2 устраняется компьютером 8 также, как описано выше. (Построение дополнительных промежутков, связанных с LM1 и LM2, на фиг.6а не производилось, чтобы не загромождать поле рисунка).
При скорости 5 км/час время измерения на пути 1,3 метра в худшем случае составляет (1,3·3600)/5000=0,936 сек, и, значит, при частоте собственных колебаний автомобилей, например, 5 Гц на измеряемом отрезке (t1-tn) уложится 4-5 волн, а среднее число показаний в каждой волне будет около 90-100. Компьютер 8 производит сложение показаний по каждому промежутку, вычисляя частные результаты по промежуткам A1, A2...An.
При хорошем качестве весов, дорожного покрытия, вождения частные результаты A1, A2...An близки по величине к Аср, являющемуся истинным значением веса оси. Тем более близким к Аср будет среднее всех частных результатов A1, А2…Аn, которое на последнем этапе вычисляется компьютером 8 и принимается за вес оси.
Однако в ряде случаев в процессе взвешивания возникают значительные нестационарные помехи - от т.н. короткой неровности пути, рывка или торможения.
На фиг.6б показан случай, когда в момент времени, близкий к t3, на сигнал тензодатчиков 5, 6 вследствие резкого торможения происходит наложение нестационарной помехи, обычно более высокочастотной, нежели сам сигнал.
В этом случае компьютер 8, как и в прошлом примере, вычислит частные результаты, но результаты А3 и А4 по величине будут выпадать из ряда других частных результатов по данной оси А1, A2...An. Кроме того, результаты А3 и А4 содержат значительно меньшее число показаний. Такие укороченные промежутки должны быть проверены по критериям выбросов, т.к. частота собственных колебаний конкретного объекта - исключительно устойчивый параметр и без серьезных причин не меняется.
Критерий исключения выбросов, записанный в программе компьютера 8, может быть различным (отбрасывается один или два наиболее выпадающих результата, устанавливается величина выброса) в зависимости, например, от класса точности весов.
После исключения выбросов компьютер 8 подсчитывает, как и в примере на фиг.6, среднее всех частных результатов A1, A2...An, за исключением выбросов. Это принимается за вес оси.
При взвешивании двухосного моста (фиг.5 поз. б1) компьютер 8 после исчезновения сигнала “ВС”:
- запоминает показания преобразователя 7 при проезде 1-й оси моста;
- определяет по величине показаний наезд 2-й оси;
- запоминает показания при проезде обеих осей моста;
- определяет по величине показаний выезд 1-й оси;
- запоминает показания преобразователя 7 при проезде 2-й оси моста до появления сигнала “ВС”;
- определяет тип элемента: две оси подряд въехали, две оси подряд выехали, это - двухосный мост;
- погашает показания проезда одиночных осей (крайних по фиг.5, поз. б1).
После этого компьютер 8 производит над выделенным массивом показателей точно такие же действия, как и уже описанные при взвешивании оси: выделяет крайние максимумы, подсчитывает Аср по всему промежутку, исключает ложные максимумы и минимумы, подсчитывает частные результаты по участкам от максимума до максимума, исключает выбросы при их наличии, находит вес моста.
Последней операцией компьютера 8 будет сложение веса одиночной оси с весом моста, что и будет весом автомобиля.
При взвешивании "короткого" автомобиля (фиг.5, поз.б2) дополнительно требуется установить, что промежуток а1 больше промежутка а2 (это признак одиночной оси), а промежуток d1 примерно равен промежутку d2 (признак моста).
При взвешивании двухмостового автомобиля (фиг.5, поз. г) наличие двух мостов определяется признаками мостов на краях диаграммы, что с учетом того, что объект четырехосный требует измерения на позициях, указанных стрелками.
При взвешивании автомобиля с трехосным мостом (фиг.5, поз. г) признак моста также присутствует с обеих сторон диаграммы, что позволяет безошибочно определить трехосный мост (наехало три оси, выехало три оси, а признака оси нет, значит это трехосный мост).
Все остальные комбинации элементов и осей, встречающиеся в автомобилях с прицепами, полуприцепами или в автопоездах являются производными и распознаются компьютером 8 по описанным алгоритмам.
Суммируя вышесказанное, заметим, что при правильном выборе длины L весовой платформы диаграмма нагружения-разгружения, получаемая при проезде автомобиля, позволяет однозначно идентифицировать последний с точки зрения процедуры поэлементного взвешивания. Это связано с тем, что при всем многообразии автомобилей межосевые расстояния мостов практически одинаковы, а взвешивание одиночных осей вообще не представляет проблемы.
На наш взгляд, оптимальной является длина весов L=2,6-2,7 м.
При меньших длинах измерение менее продолжительно и, следовательно, в принципе менее точно. При некотором увеличении (свыше 2,9 метра) необходимо увеличивать прочность весов, т.к. при проезде трехосных мостов или автомобилей с короткой базой на весы наезжает три оси, но при этом несколько увеличивается время измерения. При еще больших длинах возникают дополнительные (правда, разрешаемые) трудности с идентификацией объектов.
Использование поэлементного способа взвешивания обусловлено тем, что позволяет добиться высокой точности взвешивания (по сравнению с поосным способом), исключив влияние на точность измерения перераспределения осевых нагрузок мостов, возникающее во время измерения в подвесках мостов из-за неровностей пути и других возмущений.
Источники информации
1. Авторское свидетельство СССР №236052, G 01 G 19/02, 15.11.67 г.
2. Авторское свидетельство СССР №600398, G 01 G 19/02, 19.04.76 г.
3. Авторское свидетельство СССР №1002848, G 01 G 23/36, 06.06.78 г.
4. http://www.mtrus.com/p/auto/61
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| СПОСОБ ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2008 |
|
RU2390734C1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
Изобретение относится к весоизмерительной технике и может использоваться в промышленности, сельском хозяйстве и транспорте для взвешивания движущихся автомобилей. Способ поэлементного взвешивания автомобилей включает в себя их перемещение по весам, измерение и запоминание показаний нагрузки при наезде на весы одиночных осей и мостов. После этого вес осей и мостов определяют как среднее значение показаний нагрузки, а вес автомобиля как сумму весов всех его одиночных осей и мостов. Длину платформы весов определяют по формуле L=K·Mt, где К - технологический коэффициент, изменяющийся от 1,2 до 4,0, Mt - межосевое расстояние в двухосных мостах взвешиваемых автомобилей. Технический результат заключается в упрощении конструкции взвешивающего устройства и уменьшении его размеров. 2 з.п. ф-лы, 6 ил.

| Способ шлифования и полирования | 1953 |
|
SU100288A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устрой тво для взвешивания движущихся объектов | 1976 |
|
SU600398A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| 0 |
|
SU236052A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомобильные весы | |||
| ПРИБОР ДЛЯ ГОРНОЙ ЭЛЕКТРИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОМОЩИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1926 |
|
SU7560A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |

