Настоящее изобретение относится к устройству для осуществления команд соответствующей системы автоматического управления полетом профилей силового крыла (в общем обозначенные ниже термином «кайты»), в частности для оптимизации преобразования энергии ветра в электрическую или механическую энергию посредством полета кайтов, присоединенных посредством кабелей к наземным устройствам преобразования.
Из некоторых предыдущих патентов, в действительности, известны процессы для преобразования энергии ветра в электрическую или механическую энергию посредством устройств, которые способны преобразовывать механическую энергию, образованную источником ветра в другие формы энергии, как правило в электрическую энергию, которые извлекают энергию ветра из ветра, используя кайты, присоединенные к ним посредством кабелей. В частности, в Итальянской заявке на патент № TO2003A000945, Европейской заявке на патент № 040286460 и Итальянской заявке на патент № TO2006A000372 раскрываются системы для преобразования кинетической энергии ветровых течений в электрическую энергию посредством управления полетом кайтов, присоединенных к системе «карусельного» типа или посредством тяговых и возвратных ступеней. В прошлом были также предложены несколько конструкций, относящихся к тяговым лодкам посредством устройств, которые захватывают ветровые течения посредством кайтов, подобные которым описаны в частности в Британском патенте № 2098951, патенте США № 5056447, патенте США 5435259, Международной патентной заявке № WO03097448, патентной заявке США № 2004035345, патентной заявке США № 2004200396, международной патентной заявке № WO2005100147, международной патентной заявке № WO2005100148, международной патентной заявке WO2005100149, Германской патентной заявке № DE102004018814.
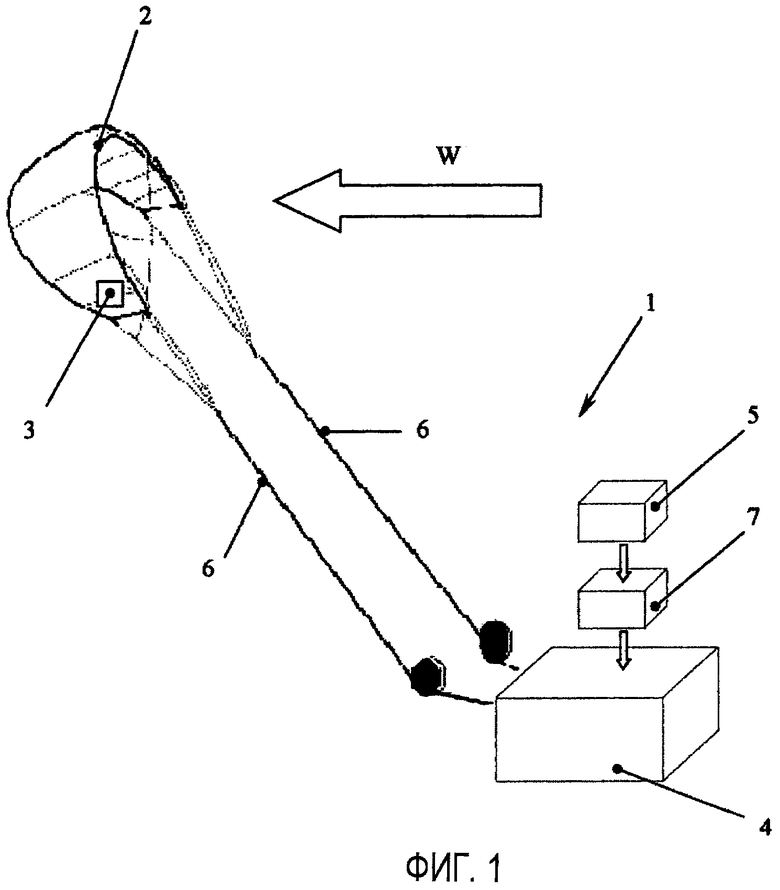
В вышеупомянутых системах управление полетом кайтов достигается посредством систем, подобных той, которая показана на прилагаемой фиг.1, на которой система 1 управления в основном содержит:
- датчик 3 в составе кайта 2, выполненный с возможностью обнаруживать первые порции информации, касающиеся, по меньшей мере, положения и ориентации в пространстве самого кайта 2, и трехосных ускорений, которым он подвержен;
- датчик 5 на земле, выполненный с возможностью обнаруживать вторые порции информации, касающиеся, по меньшей мере, величины натяжения на ведущих кабелях кайта 2, и их относительного положения, направления и интенсивности ветрового течения W, внутрь которого кайт 2 погружен;
- средство 7 обработки и управления первой и второй порциями информации, выполненное с возможностью преобразования содержимого такой информации в подходящее, управляющее воздействие, которое осуществляется в механическом приводе, действующем на ведущие кабели 6 кайта 2 посредством исполнительного блока 4; воздействия, которые такой блок 4 должен осуществлять на кабели 6, бывают в основном двух типов: параллельное разматывание или наматывание двух кабелей 6 и раздельное управление положением кабелей 6.
При режиме работы, уже предложенном в предшествующем уровне техники, выполняется два вышеупомянутых действия, осуществляемые двумя лебедками для наматывания кабелей 6, приводимыми в действие двумя независимыми двигателями. Таким образом, однако, большая инерция лебедок может чрезмерно снизить готовность запуска раздельного управления, ограничивая эффективность управления полетом кайтов. Более того, с этой конструкцией невозможно предпочтительно принять во внимание то, что мощности, связанные с параллельным разматыванием, наматыванием двух кабелей, высоки, и требуемые точности для управления разматывающим, наматывающим перемещениями малы, тогда как для раздельного управления кабелями мощности являются малыми и требуемая точность высокой. В вышеупомянутой конструкции два двигателя должны оба иметь необходимые, высокие мощности для параллельного разматывания, наматывания двух кабелей и требуемую точность для раздельного управления, вследствие этого требуется использование двух дорогих двигателей.
Следовательно, задачей настоящего изобретения является решение проблем вышеупомянутого предшествующего уровня техники посредством предоставления системы, в которой, по меньшей мере, используются два взаимно независимых двигателя, соответственно один для осуществления разматывания, наматывания кабелей, и еще один для осуществления действия раздельного управления.
Вышеупомянутые и другие задачи и преимущества изобретения станут ясными из следующего описания, полученные системой для осуществления автоматического управления полетом кайтов, как описано в пункте 1. Предпочтительные варианты выполнения и нетривиальные вариации настоящего изобретения являются объектом патентования зависимых пунктов формулы изобретения.
Настоящее изобретение будет более понятно при описании некоторых предпочтительных вариантов его выполнения, представленных в качестве неограничивающих примеров, со ссылкой на прилагаемые чертежи, на которых:
- фиг.1 показывает схематичное представление варианта выполнения управления полетом кайтов в соответствии с предшествующим уровнем техники; и
- фиг.2 показывает схематичное представление варианта выполнения системы для осуществления автоматического управления полетом кайтов в соответствии с настоящим изобретением.
Затем со ссылкой на фиг.2 можно отметить, что система 10 для осуществления автоматического контроля полетом, по меньшей мере, одного кайта 11 в соответствии с настоящим изобретением содержит:
- по меньшей мере, один первый серводвигатель 12, выполненный с возможностью управлять вращением, по меньшей мере, двух лебедок 14a, 14b, на каждую из которых, по меньшей мере, наматывается один из, по меньшей мере, двух кабелей 13 для управления и приведения в действие кайта 11, для того чтобы разматывать, наматывать упомянутые кабели 13 на упомянутых лебедках 14a, 14b; возможно каждый кабель 13 может приводиться в движение по его длине, заключенной между кайтом 11 и соответствующей лебедкой 14a, 14b подходящей системой 20 передач; для того чтобы синхронно и равномерно, в предпочтительном варианте выполнения, разматывать, наматывать кабели, лебедки 14a, 14b имеют барабан такого же диаметра и обе закреплены на одном ведущем валу 12a первого серводвигателя 12;
- по меньшей мере, один второй серводвигатель 15, выполненный с возможностью управлять поступательным движением (например, вдоль направления, показанного стрелкой  ), по меньшей мере, одним суппортом 16, причем такой суппорт может снабжаться, по меньшей мере, двумя блоками 17 для разветвления передач кабелей 13, для того чтобы осуществлять действие раздельного управления двух кабелей 13. В частности для того чтобы осуществлять вышеупомянутое поступательное движение, второй серводвигатель 15 может взаимодействовать с суппортом 16 посредством, по меньшей мере, одного зубчатого механизма 15a, изготовленного из, по меньшей мере, одного ведущего зубчатого колеса 15b, движимого вторым серводвигателем 15, сцепленным с, по меньшей мере, одной зубчатой рейкой 15с, составляющей одно целое с суппортом 16, направление поступательного движения суппорта 16 явно зависит от направления вращения (обозначенный как пример стрелкой
), по меньшей мере, одним суппортом 16, причем такой суппорт может снабжаться, по меньшей мере, двумя блоками 17 для разветвления передач кабелей 13, для того чтобы осуществлять действие раздельного управления двух кабелей 13. В частности для того чтобы осуществлять вышеупомянутое поступательное движение, второй серводвигатель 15 может взаимодействовать с суппортом 16 посредством, по меньшей мере, одного зубчатого механизма 15a, изготовленного из, по меньшей мере, одного ведущего зубчатого колеса 15b, движимого вторым серводвигателем 15, сцепленным с, по меньшей мере, одной зубчатой рейкой 15с, составляющей одно целое с суппортом 16, направление поступательного движения суппорта 16 явно зависит от направления вращения (обозначенный как пример стрелкой  ) зубчатого колеса 15b.
) зубчатого колеса 15b.
Возможно система 10 в соответствии с настоящим изобретением может также содержать:
- по меньшей мере, одну компенсирующую систему 18 для поглощения вариаций силы тяги кайта 11 на кабелях 13, возможно вызванных турбулентностями ветра;
- по меньшей мере, один датчик 19 нагрузки, изготовленный, например, как тензодатчик, выполненный с возможностью определять мгновенные величины сил тяги, величины, которые могут быть использованы системой управления полетом кайта как для оптимизации генерируемых мощностей, так и для осуществления вмешательств, чтобы минимизировать риски структурных перегрузок в случае больших турбулентностей ветра.
Можно отметить, что в системе 10 для осуществления управления полетом кайтов настоящего изобретения мощности, требуемые первым серводвигателем, очень малы, так как силы тяги, оказывающие воздействие на суппорт 16 двумя кабелями 13 посредством блоков 17, являются по большей части сокращенными.
Более того, инерции, связанные с передвижением суппорта 16, очень малы (относительно инерции лебедок 14a, 14b), позволяют быстро реагировать при управлении полетом кайта 11.
Изобретение относится к системам управления кайтов. Система (10) для осуществления автоматического управления полетом, по меньшей мере, одного кайта (11), управляемого и приводимого в движение кабелями (13), содержит, по меньшей мере, один первый серводвигатель (12) и, по меньшей мере, один второй серводвигатель (15). Первый серводвигатель выполнен с возможностью разматывать и наматывать упомянутые кабели (13) на соответствующие лебедки (14а, 14b). Второй серводвигатель (15) выполнен с возможностью осуществлять действие раздельного управления кабелями (13). Достигается повышение точности управления наматывающим, разматывающим перемещениями и снижение потребления мощности. 7 з.п. ф-лы, 2 ил.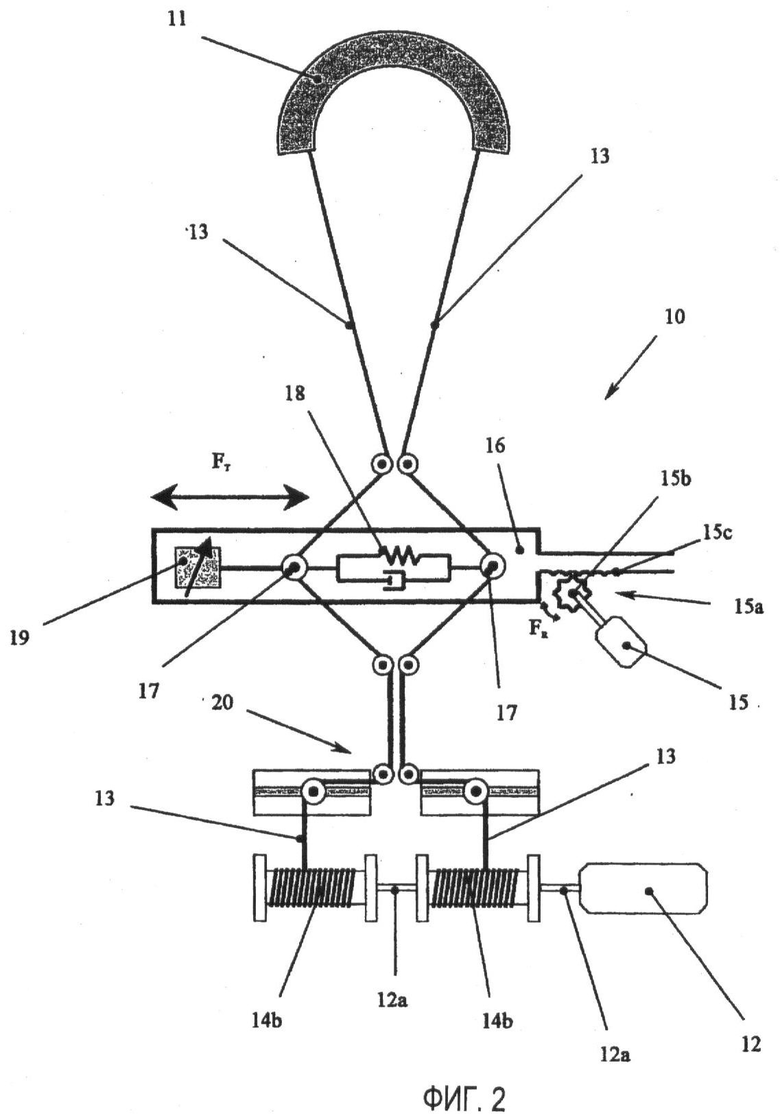
1. Система (10) для осуществления автоматического управления полетом, по меньшей мере, одного кайта (11), управляемого и приводимого в движение кабелями (13), отличающаяся тем, что система (10) содержит: по меньшей мере, один первый серводвигатель (12), выполненный с возможностью разматывать и наматывать упомянутые кабели (13) на соответствующие лебедки (14а, 14b); по меньшей мере, один второй серводвигатель (15), выполненный с возможностью осуществлять действие раздельного управления упомянутыми кабелями (13).
2. Система (10) по п.1, отличающаяся тем, что упомянутый первый серводвигатель (12) вращает упомянутые лебедки (14а, 14b).
3. Система (10) по пп.1 и 2, отличающаяся тем, что упомянутые лебедки (14а, 14b) имеют барабан такого же диаметра и обе закреплены на одном ведущем валу (12а) упомянутого первого серводвигателя (12).
4. Система (10) по п.1, отличающаяся тем, что каждый из упомянутых кабелей (13) приводится в движение по его длине, заключенной между кайтом (11) и соответствующей лебедкой (14а, 14b), системой (20) передач.
5. Система (10) по п.1, отличающаяся тем, что упомянутый второй сервопривод (15) управляет поступательным движением (Ft), по меньшей мере, одного суппорта (16), причем упомянутый суппорт снабжен, по меньшей мере, двумя блоками (17) для разветвления передач кабелей (13).
6. Система (10) по п.1, отличающаяся тем, что упомянутый второй серводвигатель (15) выполнен с возможностью взаимодействия с суппортом (16) посредством, по меньшей мере, одного зубчатого механизма (15а), содержащего, по меньшей мере, одно ведущее зубчатое колесо (15b), приводимое в действие вторым серводвигателем (15), сцепленным с, по меньшей мере, одной зубчатой рейкой (15с), составляющей одно целое с суппортом (16).
7. Система (10) по п.1, отличающаяся тем, что она содержит, по меньшей мере, одну выполненную с возможностью компенсирующую систему (18) поглощения вариаций силы тяги кайта (11) на кабелях (13).
8. Система (10) по п.7, отличающаяся тем, что она содержит, по меньшей мере, один датчик (19) нагрузки, выполненный с возможностью определять мгновенные величины упомянутых сил тяги.
9. Система (10) по п.8, отличающаяся тем, что упомянутый датчик (19) нагрузки является тензодатчиком.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОХЛАДИТЕЛЬНЫМ ДОЖДЕВАНИЕМ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 1993 |
|
RU2098946C1 |
| US 6003457 А, 21.12.1999 | |||
| КОМБИНАЦИИ КОНЪЮГАТА АНТИ-HER2-АНТИТЕЛО-ЛЕКАРСТВЕННОЕ СРЕДСТВО И ХИМИОТЕРАПЕВТИЧЕСКИХ СРЕДСТВ И СПОСОБЫ ПРИМЕНЕНИЯ | 2018 |
|
RU2781195C2 |
| WO 2005100150 A1, 27.10.2005 | |||
| Прибор для иллюстрации получения стоячих волн | 1931 |
|
SU29281A1 |

