Настоящее изобретение относится к устройству для помощи в пилотировании летательного аппарата, в частности транспортного самолета, во время этапа захода на посадку с целью приземления.
В контексте настоящего изобретения упомянутый этап захода на посадку представляет:
- начальный этап, определенный между первой точкой (известной как «точка конечного этапа захода на посадку») и второй точкой (известной как «точка перехода»), во время этой фазы летательный аппарат ведется согласно заранее определенному плану полета со слежением за требуемыми навигационными характеристиками («Required Navigation Performance» («Требуемые навигационные характеристики») являются общепризнанным англоязычным выражением, часто сокращаемым до аббревиатуры RNP);
- заключительный этап, определенный между точкой перехода и фактическим приземлением на взлетно-посадочную полосу, во время этой фазы летательный аппарат ведется по линии захода на посадку.
Известно, что в международном контексте, в котором воздушное движение постоянно возрастает, траекториям полета летательных аппаратов выделяются трассы полета все более и более узкой ширины. Для того чтобы можно было уменьшать ширину трассы полета, в частности, рассматриваются некоторые аспекты упомянутых характеристик летательного аппарата. Последние характеристики, в частности, реализуются во время упомянутого начального этапа захода на посадку между упомянутой точкой конечного этапа захода на посадку и упомянутой точкой перехода.
Также известно, что аспекты характеристик, которые летательному аппарату необходимо быть способным соблюдать для того, чтобы оставаться внутри такой трассы полета, принадлежат к двум типам, а именно:
- характеристикам наведения: цель состоит в том, чтобы заставить летательный аппарат правильно следовать плану полета, то есть чтобы минимизировать ошибку наведения, известную по ее англоязычному термину «Flight Technical Error» («Техническая ошибка пилотирования», или FTE);
- навигационным характеристикам: цель состоит в том, чтобы получать хорошую оценку фактического положения летательного аппарата, то есть чтобы минимизировать ошибку оценки положения («Position Estimation Error» («Ошибка оценки положения») является общеизвестным англоязычным термином, часто сокращаемым до аббревиатуры PEE).
Поэтому, для того чтобы удовлетворять вышеприведенным критериям качества функционирования, необходимо минимизировать сумму этих двух ошибок, FTE и PEE, а именно суммарную ошибку, известную по своему англоязычному термину «Total System Error» («Общая системная ошибка»), или TSE.
Способность придерживаться этого параметра TSE является одним из необходимых условий, которое, в частности, позволит:
- пилотировать самолет по новым типам захода на посадку над местностью, содержащей препятствия или представляющей ограничения для приземления;
- выполнять одновременные заходы на посадку на взлетно-посадочные полосы, которые расположены близко друг к другу;
- санкционироваться типам принятия решения о приземлении с более низким минимумом.
Как результат рассмотрение навигационных характеристик и характеристик наведения типа RNP на вышеупомянутом начальном этапе (между упомянутой точкой конечного этапа захода на посадку и упомянутой точкой перехода) дает возможность снижать минимальные высоты принятия решения по сравнению с привычным неточным заходом на посадку, но не дает возможности снижаться ниже заранее определенной абсолютной высоты полета, например, в 250 футов (приблизительно 75 метров), которая относится к упомянутой точке перехода.
Впереди от упомянутой точки перехода может быть реализован упомянутый заключительный этап этапа захода на посадку с ведением летательного аппарата по линии захода на посадку, которая совместима с точным заходом на посадку по приборам, например, с использованием приборов ILS (аббревиатура для общепризнанного английского термина «Instrument Landing System» («Система посадки по приборам»)) или с неточным заходом на посадку.
Однако в ситуациях, таких как эти, при переходе (в упомянутой точке перехода) между начальным этапом и заключительным этапом изменение режима наведения, как правило, выполняется до некоторой степени внезапно, особенно в отношении собственно наведения и в том, что касается отображения соответствующей информации, представляемой экипажу. Это, в частности, вызывает следующие недостатки:
- дискомфорт пассажиров и пилота;
- напряженное состояние пилота, когда летательный аппарат резко реагирует;
- во время начального этапа недостаток информации, представляемой пилоту, которая позволит ему определить положение летательного аппарата относительно линии захода на посадку xLS (указано ниже) и проверять, что положение летательного аппарата совместимо с этой линией xLS.
Настоящее изобретение относится к устройству для помощи в пилотировании летательного аппарата во время этапа захода на посадку с целью приземления, которое будет способно преодолеть вышеупомянутые недостатки, упомянутый этап захода на посадку представляет:
- начальный этап, определенный между первой точкой перехода и по меньшей мере одной второй точкой перехода, во время этого этапа летательный аппарат ведется согласно заранее определенному плану полета с соблюдением требуемых навигационных характеристик;
- заключительный этап, определенный между этой второй точкой перехода и приземлением, во время этого этапа летательный аппарат ведется по линии захода на посадку.
Для этой цели согласно изобретению упомянутое устройство содержит:
- набор источников информации, способных к снабжению информацией, относящейся к летательному аппарату и, в частности, относящейся к его текущему положению;
- навигационную базу данных;
- вычислительную систему, способную к определению:
траектории полета относительно упомянутого плана полета;
первых бокового и вертикального отклонений между текущим положением летательного аппарата и упомянутой траекторией полета;
упомянутой линии захода на посадку;
вторых бокового и вертикального отклонений между текущим положением летательного аппарата и упомянутой линией захода на посадку;
- систему наведения, способную к помощи в наведении летательного аппарата;
- систему отображения,
и отличается тем, что:
- упомянутое устройство дополнительно содержит систему управления, содержащую по меньшей мере одно приводимое в действие средство управления, позволяющее пилоту летательного аппарата вызывать (а именно, устанавливать или включать в зависимости от варианта осуществления) гибридный режим захода на посадку, содержащий первый режим наведения для ведения летательного аппарата во время упомянутого начального этапа и второй режим наведения для ведения летательного аппарата во время упомянутого заключительного этапа;
- упомянутая вычислительная система сформирована таким образом, чтобы определять, как только упомянутое средство управления приведено в действие, упомянутые как первые, так и вторые отклонения касательно упомянутого вызванного гибридного режима захода на посадку и выполнить это, как только вся необходимая для выполнения информация становится доступной на борту летательного аппарата;
- упомянутая система наведения сформирована таким образом, чтобы помогать в ведении летательного аппарата, если упомянутое средство управления приведено в действие как во время упомянутого начального этапа между упомянутыми первой и второй точками перехода в соответствии с упомянутым первым режимом наведения, так и во время упомянутого заключительного этапа дальше вперед от упомянутой второй точки перехода согласно второму режиму наведения, переход между упомянутыми первым и вторым режимами наведения выполняется автоматически упомянутой системой наведения;
- упомянутая система отображения сформирована таким образом, чтобы отображать на по меньшей мере одном экране отображения, как только упомянутое средство управления приведено в действие, по меньшей мере:
средство индикации, указывающее упомянутый вызванный гибридный режим захода на посадку;
средство индикации, указывающее, надлежащим образом по меньшей мере текущий режим наведения упомянутого вызванного гибридного режима захода на посадку;
средство индикации, соответственно представляющее упомянутые первые и вторые отклонения, это имеет место, как только таковые становятся доступны.
Таким образом, благодаря изобретению:
- переход между первым и вторым режимами наведения (то есть между наведением, относящимся соответственно к упомянутым начальному и заключительному этапам) выполняется автоматически системой наведения;
- экипаж летательного аппарата информируется, как только вызван (установлен или включен) гибридный режим захода на посадку, как об этом вызове, так и об отклонениях, относящихся к обоим - первому и второму - режимам наведения упомянутого вызванного гибридного режима захода на посадку.
Это дает возможность получать простой и эффективный переход между начальным этапом и заключительным этапом упомянутого этапа захода на посадку.
В дополнение экипаж самолета незамедлительно информируется о боковых и вертикальных отклонениях не только в отношении упомянутого первого режима наведения для начального этапа, который реализуется в это время или который будет реализован очень скоро, но также и в отношении упомянутого второго режима наведения для упомянутого заключительного этапа, который не будет реализовываться до окончания этого начального этапа. Как результат экипаж может, как только вызван гибридный режим захода на посадку, контролировать информацию, относящуюся к упомянутому второму режиму наведения, и, таким образом, предвидеть его более позднее применение.
Устройство согласно настоящему изобретению также проявляет другие преимущества. В частности:
- оно отменяет действия пилота близко от земли, а потому снижает напряженное состояние и рабочую нагрузку пилота около уровня земли;
- оно позволяет процедуре, которая должна координироваться (с другими типами захода на посадку), поскольку пилот занят, исходя из выбора захода на посадку отслеживать параметры захода на посадку и устанавливать заход на посадку до точки конечного этапа захода на посадку;
- оно предоставляет возможность более плавного захода на посадку и более плавного перехода (между режимами RNP и xLS, указанными ниже), и это способствует улучшению комфорта пассажиров и пилота.
В предпочтительном варианте осуществления упомянутая система управления, например многофункциональный пульт управления и отображения («Multipurpose Control Display Unit» («Многофункциональный пульт управления и отображения») является общеизвестным англоязычным выражением, обычно сокращаемым до аббревиатуры MCDU), содержит множество средств управления, например нажимных кнопок, каждое из которых может использоваться для вызова одного из множества разных гибридных режимов захода на посадку. В этом случае предпочтительно упомянутая система управления содержит средство управления для соответственного вызова гибридных режимов захода на посадку, каждый из которых состоит из:
- первого режима наведения, позволяющего соблюдать упомянутые требуемые навигационные характеристики (или RNP);
- соответственно одного из следующих вторых режимов наведения: режима точного захода на посадку из множества разных режимов точного захода на посадку или режима неточного захода на посадку.
В контексте настоящего изобретения устройство согласно изобретению, в частности, способно рассматривать следующие режимы точного захода на посадку:
- режим захода на посадку по приборам, относящийся к системе посадки по приборам («Instrument Landing System» («Система посадки по приборам») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры ILS);
- режим захода на посадку по приборам, относящийся к микроволновой системе посадки («Microwave Landing System» («Микроволновая система посадки») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры MLS);
- режим захода на посадку по приборам, относящийся к системе посадки на основе GPS («GPS» является общеизвестной аббревиатурой для англоязычного выражения «Global Positioning System» («Глобальная система определения местоположения»)) типа GLS («GLS» является общепризнанной аббревиатурой для англоязычного выражения «GPS Landing System» («Система посадки на основе GPS»).
В дополнение режим неточного захода на посадку может быть типа FLS, как, например, описано в патентах FR 2852683, FR 2852684 и FR 2852686.
Более того, в одном из конкретных вариантов осуществления устройство согласно изобретению сформировано таким образом, чтобы выполнять операции, относящиеся к упомянутому начальному этапу, также во время этапа ухода на второй круг, который прерывает исполняемый в текущий момент этап захода на посадку. Этап ухода на второй круг, такой как этот, может быть необходим, когда обнаружена определенная неисправность или когда пилот не может получить визуального определения местоположения по своим пеленгам на высоте принятия решения.
Более того, преимущественно упомянутая система отображения содержит навигационный дисплей («Navigation Display» («Навигационный дисплей») является общепризнанным англоязычным выражением, обычно сокращаемым до аббревиатуры ND) и основной пилотажный дисплей («Primary Flight Display» («Основной пилотажный дисплей») является общепризнанным англоязычным выражением, обычно сокращаемым до аббревиатуры PFD).
В дополнение преимущественно упомянутая система отображения сформирована таким образом, чтобы проводить различие между отображением информации, относящейся к текущему режиму наведения упомянутого гибридного режима захода на посадку, и отображением информации, относящейся к другому режиму наведения упомянутого гибридного режима захода на посадку. Это различение, например, может выполняться с использованием разных цветов, разных яркостей и/или разной графики.
Более того, преимущественно упомянутая система отображения сформирована таким образом, чтобы быть способной отображать:
- первое вспомогательное средство индикации, относящееся к информации (например, упомянутым требуемым навигационным характеристикам) касательно упомянутого первого режима наведения;
- второе вспомогательное средство индикации, относящееся к информации (например, особенности упомянутого второго режима наведения, частоту и канал, используемые этим вторым режимом наведения) касательно упомянутого второго режима наведения; и, возможно,
- положение точек бокового и вертикального перехода.
Более того, в одном из конкретных вариантов осуществления упомянутая вычислительная система содержит:
- систему управления полетом («Flight Management System» («Система управления полетом») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры FMS) для определения упомянутых первых бокового и вертикального отклонений;
- многорежимный приемник содействия приземлению («Multimode Receiver» («Многорежимный приемник») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры MMR) для определения упомянутых вторых бокового и вертикального отклонений.
Более того, преимущественно упомянутый заключительный этап начинается:
- поскольку принимается во внимание боковое наведение, когда летательный аппарат достигает второй точки бокового перехода в самом начале;
- поскольку принимается во внимание вертикальное наведение, когда летательный аппарат достигает второй вертикальной точки перехода в самом начале.
В таком случае преимущественно:
- упомянутая навигационная база данных содержит заранее определенные опорные точки упомянутых вторых точек бокового и вертикального перехода, когда второй режим наведения соответствует режиму точного захода на посадку; и/или
- упомянутая вычислительная система вычисляет опорные точки упомянутых вторых точек бокового и вертикального перехода, когда второй режим наведения соответствует режиму неточного захода на посадку.
Прилагаемые чертежи облегчат понимание того, каким образом может быть воплощено изобретение. На этих чертежах идентичные ссылки обозначают элементы, которые являются подобными.
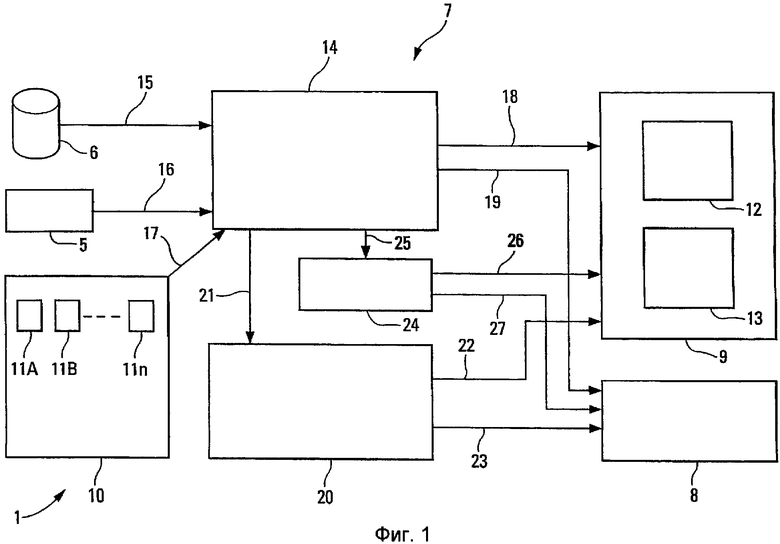
Фиг.1 - структурная схема устройства согласно изобретению.
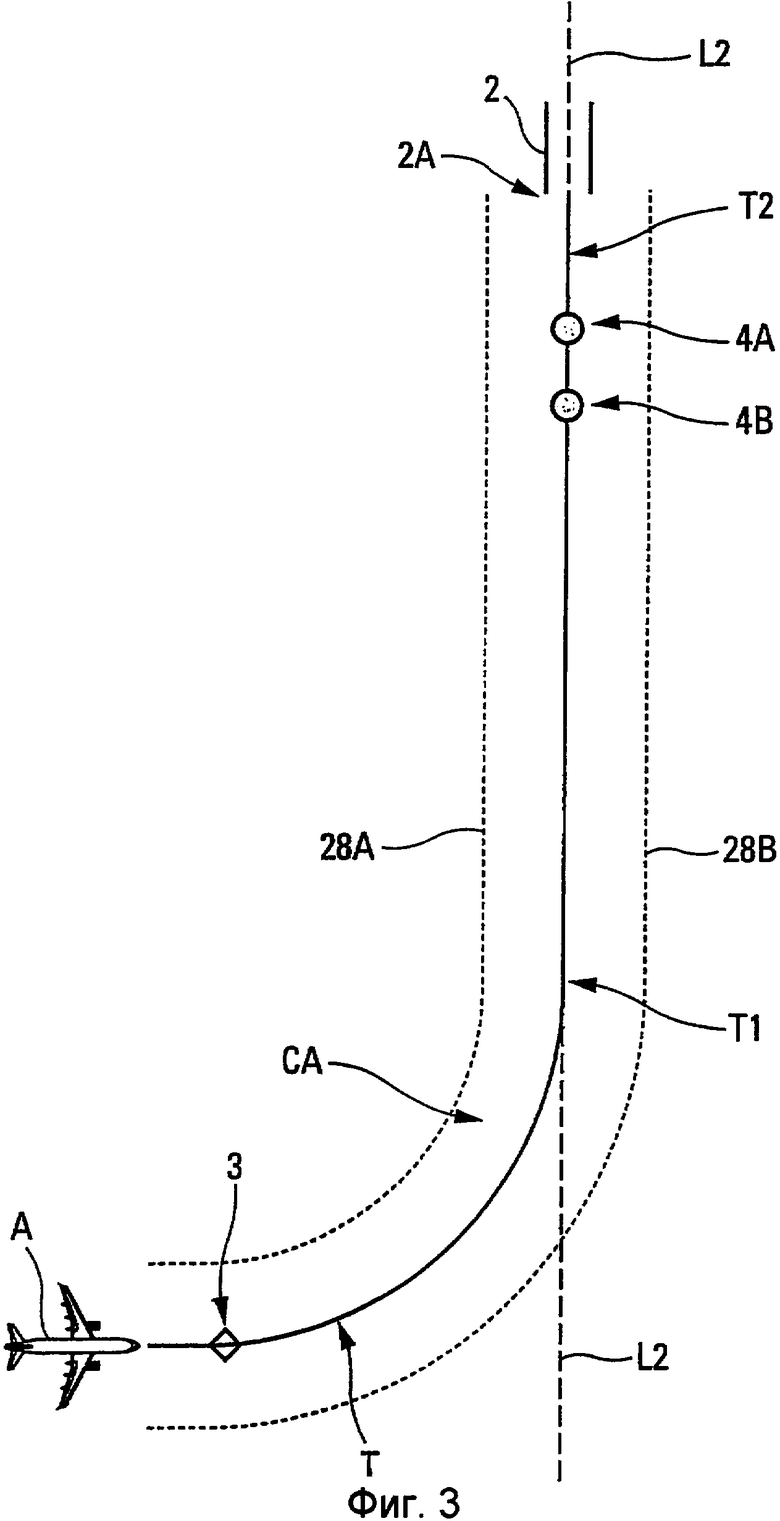
Фиг.2 и 3 - две диаграммы, схематически иллюстрирующие в вертикальной плоскости и горизонтальной плоскости соответственно этап захода на посадку, такой как один из тех, к которому относится настоящее изобретение.
Устройство 1 согласно изобретению, схематически изображенное на фиг.1, предназначено для помощи в пилотировании летательного аппарата A, в частности транспортного самолета, во время этапа PA захода на посадку с целью приземления на взлетно-посадочную полосу 2. С этой целью упомянутый летательный аппарат A ведется во время этого этапа PA захода на посадку по траектории T, схематично изображенной на фиг.2 и 3, которые относятся к одному из конкретных примеров.
В контексте настоящего изобретения упомянутый этап PA захода на посадку содержит:
- начальный этап P1, определенный между точкой 3 перехода (или «точкой конечного этапа захода на посадку») и по меньшей мере одной другой точкой 4 перехода, во время этого этапа летательный аппарат A ведется согласно заранее определенному плану полета со слежением за требуемыми навигационными характеристиками («Required Navigation Performance» («Требуемые навигационные характеристики») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры RNP);
- заключительный этап P2, определенный между точкой 4 перехода и приземлением на взлетно-посадочную полосу 2, во время этого этапа летательный аппарат A ведется вдоль по меньшей мере одной линии L1 захода на посадку, схематично изображенной на фиг.2.
Упомянутое устройство 1 принадлежит к типу, содержащему:
- набор 5 источников информации, способных к снабжению информацией, относящейся к летательному аппарату A и, в частности, относящейся к его текущему положению. Чтобы выполнить это, упомянутый набор 5, в частности, может содержать инерциальные системы отсчета и датчики GPS;
- навигационную базу 6 данных, указанную ниже;
- вычислительную систему 7, способную к определению:
траектории T1 полета относительно упомянутого плана полета во время упомянутого начального этапа P1;
первых бокового и вертикального отклонений между текущим положением летательного аппарата A и упомянутой траекторией T1 полета во время начального этапа P1;
упомянутой линии L1 захода на посадку;
вторых бокового и вертикального отклонений между текущим положением летательного аппарата A и упомянутой линией L1 захода на посадку во время упомянутого заключительного этапа P2;
- систему 8 наведения, способную к помощи в наведении летательного аппарата A;
- систему 9 отображения, указанную ниже.
Упомянутая система 8 наведения содержит следующие средства, которые не были специально изображены:
- средство вычисления, которое предназначено обычным образом для определения справочных данных полета;
- по меньшей мере одно средство помощи в пилотировании, например автопилот и/или командный пилотажный прибор, который на основе справочных данных полета, принимаемых из упомянутого вычислительного средства, определяет команды для пилотирования летательного аппарата;
- средство приведения в действие управляемых элементов, например, таких как поверхности управления (рули, элероны и т.п.) летательного аппарата, на которое подаются летные команды, определенные таким образом.
Согласно изобретению упомянутое устройство 1 дополнительно содержит по меньшей мере одну систему 10 управления, например многофункциональный пульт управления и отображения («Multipurpose Control Display Unit» («Многофункциональный пульт управления и отображения») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры MCDU) и/или блок системы управления полетом («Flight Control Unit» («Блок системы управления полетом») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры FCU), которая содержит множество средств 11A, 11B, …, 11n управления. Каждое из упомянутых средств 11A, 11B, …, 11n управления позволяет пилоту летательного аппарата A вызывать конкретный гибридный режим захода на посадку, который содержит:
- первый режим наведения для бокового и вертикального наведения летательного аппарата A во время упомянутого начального этапа P1;
- второй режим наведения для бокового и вертикального наведения летательного аппарата A во время упомянутого заключительного этапа P2.
Более точно, упомянутые гибридные режимы захода на посадку состоят из:
- первого режима наведения, в котором упомянутые требуемые навигационные характеристики (RNP) могут соблюдаться, для того чтобы удерживать летательный аппарат A на трассе CA полета, которая разграничена линиями 28A и 28B на фиг.3;
- соответственно одного из следующих вторых режимов наведения:
режима точного захода на посадку из множества разных режимов точного захода на посадку, который использует информацию, принимаемую каждый раз с земли;
режима неточного захода на посадку, который использует только информацию, доступную на борту летательного аппарата A.
В контексте настоящего изобретения устройство 1 согласно изобретению, в частности, рассматривает следующие режимы точного захода на посадку:
- режим захода на посадку по приборам, относящийся к системе посадки по приборам («Instrument Landing System» («Система посадки по приборам») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры ILS), например, как описанная в патенте FR 2852685;
- режим захода на посадку по приборам, относящийся к микроволновой системе посадки («Microwave Landing System» («Микроволновая система посадки») является общеизвестным англоязычным выражением, часто сокращаемым до аббревиатуры MLS);
- режим захода на посадку по приборам, относящийся к системе посадки на основе GPS (GPS является аббревиатурой для общеизвестного англоязычного выражения «Global Positioning System» («Глобальная система определения местоположения»)) типа GLS (GLS является аббревиатурой для общеизвестного англоязычного выражения «GPS Landing System» («Система посадки на основе GPS»)).
Таким образом, различные гибридные режимы захода на посадку все могут обозначаться в виде «RNP/xLS», xLS, в общем, представляет один из вышеупомянутых режимов ILS, MLS, GLS и FLS захода на посадку.
Более того, согласно изобретению:
- упомянутая вычислительная система 7 сформирована таким образом, чтобы определять, как только одно из упомянутых средств 11A, 11B, …, 11n управления упомянутой системы 10 управления приведено в действие, оба упомянутые первые и вторые отклонения (боковые и вертикальные), соответственно относящиеся к упомянутому первому и второму режимам наведения RNP и xLS упомянутого конкретного гибридного режима захода на посадку RNP/xLS, вызванного таким образом. Конечно, упомянутая вычислительная система 7 определяет эти первые и вторые отклонения только с такого момента времени, как информация, необходимая для выполнения этого, становится доступной на борту летательного аппарата A. Это особенно важно для линии L1 захода на посадку, которая используется для определения упомянутых вторых отклонений, и необходимо, чтобы ее можно было обнаружить с летательного аппарата A;
- упомянутая система 8 наведения сформирована таким образом, чтобы содействовать ведению летательного аппарата A, если упомянутая система 10 управления приведена в действие как во время упомянутого начального этапа P1 между упомянутыми точками 3 и 4 перехода согласно упомянутому первому режиму наведения, так и во время упомянутого заключительного этапа P2 дальше вперед от упомянутой точки 4 перехода согласно упомянутому второму режиму наведения. Переход между упомянутым первым и вторым режимами наведения выполняется автоматически упомянутой системой 8 наведения;
- упомянутая система 9 отображения сформирована таким образом, чтобы отображать по меньшей мере на одном экране 12, 13 отображения, как только упомянутая система 10 управления приведена в действие, по меньшей мере следующие средства индикации (например, выполненные в виде графических символов, алфавитно-цифровых надписей и т.п.), которые не были изображены:
средство индикации, указывающее упомянутый вызванный гибридный режим захода на посадку RNP/xLS;
средство индикации, указывающее надлежащим образом по меньшей мере текущий режим наведения упомянутого вызванного гибридного режима захода на посадку;
средство индикации, воспроизводящее соответственно упомянутые первые и вторые отклонения (как боковые, так и вертикальные).
Более того, в одном из конкретных вариантов осуществления устройство 1 согласно изобретению сформировано таким образом, чтобы выполнять операции, относящиеся к упомянутому начальному этапу P1, подобным образом и во время этапа P3 ухода на второй круг (прерывающего исполняемый в текущий момент этап захода на посадку), который изображен прерывистой линией на фиг.2. Этап P3 ухода на второй круг, такой как этот, может быть необходим, когда обнаружена определенная неисправность или когда пилот не может получить визуального определения местоположения по своим пеленгам на заранее определенной высоте принятия решения.
Более того, упомянутая система 9 отображения, в частности, содержит навигационный дисплей 12 («Navigation Display» («Навигационный дисплей») является общеизвестным англоязычным выражением, обычно сокращаемым до аббревиатуры ND) и основной пилотажный дисплей 13 («Primary Flight Display» («Основной пилотажный дисплей») является общеизвестным англоязычным выражением, обычно сокращаемым до аббревиатуры PFD). В дополнение эта упомянутая система 9 отображения сформирована таким образом, чтобы проводить различие между отображением информации, относящейся к текущему режиму наведения (например, упомянутому первому режиму наведения) упомянутого гибридного режима захода на посадку, и отображением информации, относящейся к другому режиму наведения (например, упомянутому второму режиму наведения) упомянутого гибридного режима захода на посадку. Это различение, например, может выполняться с использованием разных цветов, разных яркостей и/или разной графики.
Более того, в одном из конкретных вариантов осуществления упомянутая система 9 отображения сформирована таким образом, чтобы быть способной отображать:
- первое вспомогательное средство индикации, относящееся к информации (например, упомянутым требуемым навигационным характеристикам) касательно упомянутого первого режима наведения;
- второе вспомогательное средство индикации, относящееся к информации (например, особенности упомянутого второго режима наведения, частота и канал, используемые этим вторым режимом наведения) касательно упомянутого второго режима наведения.
Более того, в одном из конкретных вариантов осуществления упомянутая вычислительная система 7 содержит:
- систему 14 управления полетом («Flight Management System» («Система управления полетом») является общеизвестным англоязычным выражением, обычно сокращаемым до аббревиатуры FMS), которая предназначена для определения упомянутых первых бокового и вертикального отклонений. Система 14 может быть присоединена линиями 15, 16, 17, 18 и 19 связи к упомянутой навигационной базе 6 данных, к упомянутому набору 5 и упомянутым системам 10, 9 и 8 соответственно;
- многорежимный приемник 20 содействия приземлению («Multimode Receiver» («Многорежимный приемник») является общеизвестным англоязычным выражением, обычно сокращаемым до аббревиатуры MMR), который предназначен для определения упомянутых вторых бокового и вертикального отклонений. Этот приемник 20 может быть присоединен через линии 21, 22 и 23 связи к упомянутым системам 14, 9 и 8 соответственно;
- средство 24 управления наведением, например, типа FGS (FGS является аббревиатурой для англоязычного выражения «Flight Guidance System» («Бортовая система наведения»)), которое предназначено для управления различными режимами наведения, в том числе переходами. Это средство 24 может быть присоединено линиями 25, 26 и 27 связи к упомянутым системам 14, 9 и 8 соответственно.
Поэтому в вышеупомянутом варианте осуществления упомянутая система 14 управления полетом обычным образом определяет упомянутые первые боковые и вертикальное отклонения между текущим положением летательного аппарата A и траекторией T1 полета, которая соответствует плану полета, более точно, с использованием текущего положения, принятого из упомянутого набора 5, и с использованием упомянутого плана полета, принятого из упомянутой навигационной базы 6 данных. В дополнение упомянутый многорежимный приемник 20 содействия приземлению определяет упомянутые вторые боковое и вертикальное отклонения между текущим положением летательного аппарата A (на траектории T2, следуемой во время заключительного этапа P2) и линией L1 захода на посадку, представляющей упомянутый второй режим наведения, с использованием текущего положения, принятого из упомянутого набора 5 через систему 14 управления полетом, и с использованием линии L1 захода на посадку, например, которая принимается из упомянутой системы 14 управления полетом. В примере по фиг.2 траектория T2, фактически следуемая, выравнивается по линии L1 захода на посадку, при этом упомянутые вторые боковое и вертикальное отклонения очень малы. В первом варианте осуществления упомянутая одиночная линия L1 захода на посадку может использоваться для бокового и вертикального наведения летательного аппарата A, давая возможность определять упомянутые вторые боковое и вертикальное отклонения, тогда как во втором варианте осуществления упомянутая линия L1 захода на посадку может использоваться для только вертикального наведения летательного аппарата A, давая возможность определять упомянутые вторые вертикальные отклонения. В этом втором варианте осуществления летательный аппарат A может наводиться в боковом направлении относительно второй линии захода на посадку (например, линии L2 на фиг.3), давая возможность определять упомянутые вторые боковые отклонения.
Будет отмечено, что:
- в контексте точного захода на посадку упомянутая линия L1 захода на посадку, как правило, воплощается по меньшей мере одним передатчиком, расположенным на земле, и детектируется на борту летательного аппарата с использованием по меньшей мере одного обычного датчика, например, который образует часть упомянутого приемника 20;
- в контексте неточного захода на посадку упомянутая линия L1 захода на посадку вычисляется обычным образом - упомянутой системой 14 управления полетом.
Будет отмечено, что в контексте настоящего изобретения вызов конкретного гибридного режима захода на посадку (приведением в действие средств 11A, 11B, …, 11n управления системы 10 управления) будет считаться соответствующим:
- либо непосредственному включению упомянутого гибридного режима захода на посадку;
- либо установке упомянутого гибридного режима захода на посадку, который будет автоматически включаться, когда одновременно выполняются другие определенные условия.
В первой альтернативной форме варианта осуществления упомянутого устройства 1 может быть предусмотрено, чтобы:
- система 14 управления полетом поставляла план полета в бортовую систему 24 наведения;
- набор 5 выдавал текущее положение летательного аппарата A в упомянутую бортовую систему 24 наведения;
- упомянутая бортовая система 24 наведения рассчитывала упомянутые первые боковое и вертикальное отклонения, которые она передает в упомянутые системы 8 и 9.
В этой первой альтернативной форме другие вышеупомянутые функции неизменны.
Более того, во второй альтернативной форме может быть предусмотрено, чтобы набор 5 источников информации непосредственно снабжал приемник 20 текущим положением летательного аппарата A.
Будет отмечено, что в предпочтительном варианте осуществления упомянутый заключительный этап P2 начинается, как изображено на фиг.3:
- поскольку принимается во внимание боковое наведение, когда летательный аппарат A достигает точки 4A бокового перехода в самом начале;
- поскольку принимается во внимание вертикальное наведение, когда летательный аппарат A достигает вертикальной точки 4B перехода в самом начале.
В ситуациях, таких как:
- во время режима точного захода на посадку упомянутая навигационная база 6 данных содержит заранее определенные опорные точки упомянутых точек 4A и 4B бокового и вертикального перехода, и они используются вторым режимом наведения, соответствующим этому режиму точного захода на посадку;
- во время режима неточного захода на посадку упомянутая вычислительная система 7 непосредственно вычисляет опорные точки упомянутых точек 4A и 4B бокового и вертикального перехода, и они используются вторым режимом наведения, соответствующим этому режиму неточного захода на посадку.
Таким образом, в силу устройства 1 согласно изобретению:
- переход между первым и вторым режимами наведения (то есть между наведением, относящимся соответственно к упомянутым начальному и заключительному этапу P1 и P2) выполняется автоматически системой 8 наведения. Это дает возможность получать простой и эффективный переход между начальным этапом P1 и заключительным этапом P2 упомянутого этапа PA захода на посадку;
- экипаж летательного аппарата A информируется, как только вызван гибридный режим захода на посадку (установкой или включением) как об этом вызове, так и об отклонениях, относящихся к обоим, первому и второму, режимам наведения упомянутого вызванного гибридного режима захода на посадку.
Таким образом, экипаж летательного аппарата A незамедлительно информируется о боковых и вертикальных отклонениях не только упомянутого первого режима наведения для начального этапа P1, который реализуется в тот момент времени (или который будет реализован очень скоро), но также упомянутого второго режима наведения для упомянутого заключительного этапа P2, который не будет реализовываться до окончания этого начального этапа P1. Как результат, экипаж, как только вызван гибридный режим захода на посадку, может контролировать информацию, относящуюся к упомянутому второму режиму наведения, и, таким образом, предвидеть его более позднее применение.
Устройство 1 согласно изобретению также проявляет другие преимущества. В частности:
- оно отменяет действия пилота близко к земле, а потому снижает напряженное состояние и рабочую нагрузку пилота около уровня земли;
- оно позволяет процедуре, которая должна координироваться (с другими типами захода на посадку), поскольку пилот занят, исходя из выбора захода на посадку отслеживать параметры захода на посадку и устанавливать заход на посадку до точки конечного этапа захода на посадку;
- оно предоставляет возможность более плавного захода на посадку и более плавного перехода (между режимами RNP и xLS), и это ведет к лучшему комфорту для пассажиров и пилота.
Ниже описан один из конкретных заходов на посадку, производимый летательным аппаратом A, содержащий этап PA захода на посадку вышеупомянутого типа и этап P3 захода на второй круг, то есть заход на посадку без фактического приземления. Конечно, заход на посадку, такой как этот, с уходом на второй круг, очень редок на практике, но он дает хорошую иллюстрацию различных признаков настоящего изобретения.
Как изображено на фиг.2 и 3, летательный аппарат A осуществляет полет по направлению к точке 3 перехода (или «точке конечного этапа захода на посадку») по обычной траектории Т0, либо согласно плану полета (управляемый режим), управляемого системой 14 управления полетом, либо следуя опорному значению (выбранный режим). Когда диспетчер управления воздушным движением разрешает экипажу летательного аппарата A начать свой конечный заход на посадку на упомянутом этапе PA захода на посадку, пилот устанавливает выбранный гибридный режим захода на посадку, воздействуя на соответствующее средство 11A, 11B, …, 11n приведения в действие системы 10 приведения в действие. В рассматриваемом примере пилот выбирает заход на посадку RNP/ILS. Конечно, такой же сценарий остается действительным для захода на посадку RNP/GLS, RNP/MLS или RNP/FLS.
В ответ на этот выбор навигационный дисплей 12 отображает наименование выбранного гибридного захода на посадку и текущие условия RNP, которые должны соблюдаться, и они отображаются, например, в нижней части и в середине этого дисплея 12. Ошибка FTE наведения также может отображаться, например, около символа, иллюстрирующего летательный аппарат A. В дополнение устройство 1 отображает информацию о RNP/xLS (RNP/ILS в рассматриваемом примере) на основном полетном дисплее 13, но не модифицирует режимы наведения, применяемые в текущий момент. Этот выбор также ведет к отображению линии ILS (линии L1 захода на посадку) на навигационном дисплее 12.
Таким образом, благодаря простому приведению в действие средства 11A, 11B, …, 11n управления устройство 1 согласно изобретению отображает множество порций информации. Эта информация, например, включает в себя боковое и вертикальное отклонения от плана полета и от линии L1 захода на посадку, частоту и канал для xLS, особенность средства xLS, расстояние до порога 2A взлетно-посадочной полосы 2, поперечную метку курса на шкале направления движения, шкалу боковых RNP и, возможно, шкалу вертикальных RNP.
По прибытии в точку 3 упомянутый первый режим наведения упомянутого вызванного гибридного режима захода на посадку автоматически включается и устанавливается второй режим наведения для заключительного этапа P2.
Конечный заход на посадку продолжается до тех пор, пока не достигнута общая точка 4 бокового/вертикального перехода (фиг.2) или точка 4A бокового перехода, подобная изображенной на фиг.3. Эта точка 4A бокового перехода публикуется на карте, имеющейся у экипажа, и кодируется в навигационной базе 6 данных. Дальше вперед от этой точки 4A точность (на 95%) xLS является лучшей, чем требуемая RNP (на 95%). Поэтому возможно переключаться на наведение xLS (второй режим наведения). Обычный режим КРМ (LOC), относящийся к наведению ILS, затем включается, и шкала бокового отклонения, отображаемая до настоящего времени, становится чисто шкалой xLS. Информация, относящаяся к вертикальной плоскости, остается неизменной.
После этого, когда достигнута вертикальная точка 4B перехода (также публикуемая на карте, имеющейся у экипажа, и также кодируемая в навигационную базу 6 данных), включается режим ГЛИССАДА (GLIDE), относящийся к упомянутому второму режиму наведения (наведению ILS), и шкала вертикального отклонения становится чисто шкалой xLS.
Обычным образом в этом примере режим КРМ (LOC) предназначен для бокового наведения летательного аппарата A вдоль луча бокового выравнивания (или курсового луча LOC), например луча L2 на фиг.3, которая иллюстрирует центральную продольную ось взлетно-посадочной полосы 2, а режим ГЛИССАДА (GLIDE) предназначен для вертикального наведения летательного аппарата A вдоль луча вертикального выравнивания (или глиссадного луча GLIDE), например луча L1 на фиг.2.
Две точки 4A, 4B бокового и вертикального перехода (или вышеупомянутая одиночная точка 4 бокового/вертикального перехода) представляют точки включения (бокового и вертикального) режимов наведения xLS при самой ранней возможности. Фактически они могут включаться позже согласно различным критериям (расстоянию между летательным аппаратом A и порогом 2A, углу пересечения, скорости и т.п.).
Если на заранее определенной высоте принятия решения пилот летательного аппарата A не может получить визуального определения местоположения по опорным точкам, необходимого для приземления на взлетно-посадочную полосу 2, или если неисправность вынуждает его уйти на второй круг, то включается режим бокового наведения следуемого плана полета и летательный аппарат A реализует этап P3, как изображено на фиг.2. В дополнение вновь отображаются отклонения от плана полета, управляемого упомянутой системой 14 управления полетом, и шкала RNP (если процедура захода на второй круг кодируется RNP). Информация о xLS остается отображаемой до тех пор, пока она действительна (до тех пор пока сигнал принимается с наземной станции), так как остается выбранным средство xLS.
Изобретение относится к управлению самолетом. Устройство (1) содержит систему (8) наведения для помощи в наведении летательного аппарата в случае приведения в действие средства (11А, 11В, 11n) управления как во время начального этапа в соответствии с первым режимом наведения, так и во время заключительного этапа в соответствии со вторым режимом наведения, переход между этими первым и вторым режимами наведения выполняется автоматически системой (8) наведения. Достигается упрощение захода самолета на посадку. 2 н. и 11 з.п. ф-лы, 3 ил.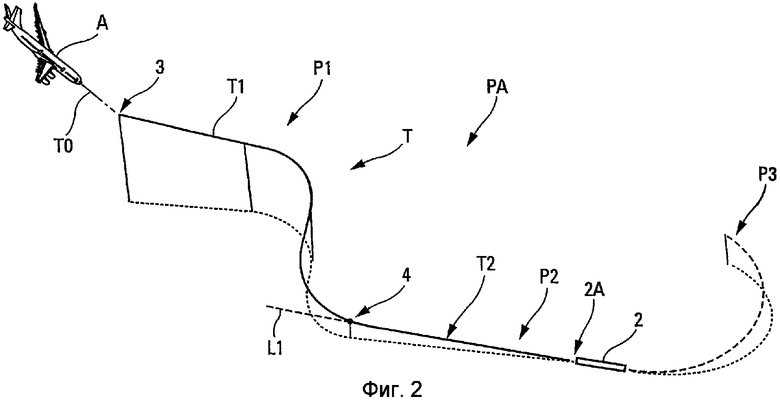
1. Устройство для помощи в пилотировании летательного аппарата во время этапа захода на посадку с целью приземления, упомянутый этап захода на посадку (РА) представляет начальный этап (Р1), определенный между первой точкой (3) перехода и, по меньшей мере, одной второй точкой (4; 4А, 4В) перехода, во время этого этапа летательный аппарат (А) ведется согласно заранее определенному плану полета с соблюдением требуемых навигационных характеристик, и заключительный этап (Р2), определенный между этой второй точкой (4; 4А, 4В) перехода и приземлением, во время этого этапа летательный аппарат (А) ведется по линии (L1) захода на посадку, при этом упомянутое устройство содержит набор (5) источников информации, способных к снабжению информацией, относящейся к летательному аппарату (А) и, в частности, относящейся к его текущему положению, навигационную базу (6) данных, вычислительную систему (7), способную к определению траектории (Т1) полета относительно упомянутого плана полета, первых бокового и вертикального отклонений между текущим положением летательного аппарата (А) и упомянутой траекторией (Т1) полета, упомянутой линии (Т1) захода на посадку и вторых бокового и вертикального отклонений между текущим положением летательного аппарата (А) и упомянутой линией (L1) захода на посадку, систему (8) наведения, способную к помощи в наведении летательного аппарата, и систему (9) отображения, при этом упомянутое устройство (1) дополнительно содержит систему (10) управления, содержащую, по меньшей мере, одно приводимое в действие средство (11А, 11В, 11n) управления, позволяющее пилоту летательного аппарата вызывать гибридный режим захода на посадку, содержащий первый режим наведения для ведения летательного аппарата (А) во время упомянутого начального этапа (Р1) и второй режим наведения для ведения летательного аппарата (А) во время упомянутого заключительного этапа (Р2), упомянутая вычислительная система (7) сформирована таким образом, чтобы определять, как только упомянутое средство (11А, 11В, 11n) управления приведено в действие, упомянутые как первые, так и вторые отклонения касательно упомянутого вызванного гибридного режима захода на посадку, и выполнять это, как только вся необходимая для выполнения информация становится доступной на борту летательного аппарата (А), упомянутая система (8) наведения сформирована таким образом, чтобы помогать в ведении летательного аппарата (А), если упомянутое средство (11А, 11В, 11n) управления приведено в действие как во время упомянутого начального этапа (Р1) между упомянутыми первой и второй точками перехода, в соответствии с упомянутым первым режимом наведения, так и во время упомянутого заключительного этапа (Р2) дальше вперед от упомянутой второй точки перехода согласно второму режиму наведения, при этом переход между упомянутыми первым и вторым режимами наведения выполняется автоматически упомянутой системой (8) наведения, и упомянутая система (9) отображения сформирована таким образом, чтобы отображать на, по меньшей мере, одном экране (12, 13) отображения, как только упомянутое средство (11А, 11В, 11n) управления приведено в действие, по меньшей мере, средство индикации, указывающее, что упомянутый гибридный режим захода на посадку вызван, средство индикации, указывающее надлежащим образом, по меньшей мере, текущий режим наведения упомянутого вызванного гибридного режима захода на посадку и средство индикации, соответственно представляющее упомянутые первые и вторые отклонения, это имеет место, как только таковые становятся доступны.
2. Устройство по п.1, в котором упомянутая система (10) управления содержит множество средств (11А, 11В, 11n) управления, каждое из которых может использоваться для вызова одного из множества разных гибридных режимов захода на посадку.
3. Устройство по п.2, в котором упомянутая система (10) управления содержит средство (11А, 11В, 11n) управления для соответственного вызова гибридных режимов захода на посадку, которые состоят одновременно из первого режима наведения, позволяющего соблюдать упомянутые требуемые навигационные характеристики, и из, соответственно, одного из следующих вторых режимов наведения: режима точного захода на посадку из множества разных режимов точного захода на посадку или режима неточного захода на посадку.
4. Устройство по п.1, при этом оно сформировано таким образом, чтобы выполнять операции, относящиеся к упомянутому начальному этапу (Р1), также и во время этапа (Р3) ухода на второй круг, который прерывает выполняемый этап захода на посадку.
5. Устройство по п.1, в котором упомянутая система (9) отображения содержит навигационный дисплей (12) и основной пилотажный дисплей (13).
6. Устройство по п.1, в котором упомянутая система (9) отображения сформирована таким образом, чтобы проводить различие между отображением информации, относящейся к текущему режиму наведения упомянутого гибридного режима захода на посадку, и отображением информации, относящейся к другому режиму наведения упомянутого гибридного режима захода на посадку.
7. Устройство по п.1, в котором упомянутая система (9) отображения сформирована таким образом, чтобы быть способной отображать первое вспомогательное средство индикации, относящееся к информации касательно упомянутого первого режима наведения, и второе вспомогательное средство индикации, относящееся к информации касательно упомянутого второго режима наведения.
8. Устройство по п.7, в котором упомянутая система (9) отображения сформирована таким образом, чтобы также быть способной отображать положение точек (4А, 4В) бокового и вертикального перехода.
9. Устройство по п.1, в котором упомянутая вычислительная система (7) содержит систему (14) управления полетом для определения упомянутых первых отклонений и многорежимный приемник (20) содействия приземлению для определения упомянутых вторых отклонений.
10. Устройство по п.1, при этом упомянутый заключительный этап (Р2) начинается, поскольку принимается во внимание боковое наведение, когда летательный аппарат (А) достигает второй точки (4А) бокового перехода в самом начале, и поскольку принимается во внимание вертикальное наведение, когда летательный аппарат (А) достигает второй вертикальной точки (4В) перехода в самом начале.
11. Устройство по п.10, в котором упомянутая навигационная база (6) данных содержит заранее определенные опорные точки упомянутых вторых точек (4А, 4В) бокового и вертикального перехода для второго режима наведения, соответствующего режиму точного захода на посадку.
12. Устройство по п.10, в котором вычислительная система (7) непосредственно вычисляет опорные точки упомянутых вторых точек (4А, 4В) бокового и вертикального перехода для второго режима наведения, соответствующего режиму неточного захода на посадку.
13. Летательный аппарат, при этом он содержит устройство (1) для помощи в пилотировании, подобное устройству по п.1.
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |
| RU 99120694 A, 27.08.2001. | |||

