дом третьего блока записи-воспроизведения и с вторым входом четвертого переключателя, выход генератора помехи через третий сумматор подключен к входу четвертого блока записи-воспроизведения и к второму входу пятого переключателя, выход второго задатчика через последовательно включенные первый блок сравнения, первый ограничитель и первый ключ соединен с первым входом первого сумматора, второй вход которого соединен с выходом первого задатчика, выход первого переключателя соединен с вторыми входами третьего блока сравнения и регистратора, выход второго переключателя соединен с первыми входами первого и второго блоков выработки пробного сигнала соответственно, второй выход второго блока выработки пробного сигналачерез последовательно включенные второй блок сравнения, модель объекта по каналу возмущения подключен к второму входу четвертого сумматора, выходом соединенного с третьими входами регистратора и испытываемого регулятора, выход третьего задатчика соединен с вторым входом второго блока выработки пробного сигнала и с вторым входом третьего переключателя, выход которого подключен к второму входу второго блока сравнения, к первому входу-испытываемого регулятора.и к четвертому . входу регистратора, выход четвертого переключателя соединен с вторым входом регулятора, с вторым входом четвертого блока сравнения и с первьм входом пятого блока сравнения, выход пятого переключателя соединен с вторым входом пятого блока сравнения, с пятым входом регистратора и с третьим входом четвертого суммат ра, дополнительный вход испытываемог регулятора соединен с выходом структурно-параметрического задатчика.
а выход - с шестым входом регистратора и с третьим входом первого блока выработки пробного сигнала, выход которого подключен к первому входу второго сумматора, второй вход которого подключен к выходу рабочего регулятора, седьмой и восьмой входы регистратора соединены с выходами соответственно первого и второго фильтров низкой частоты, выход задатчика режима работы подключен к управляющим входам пяти переключателей, первого ключа, к дополнительным входам модели объекта по каналу управления и модели объекта по каналу возмущения, третьего задатчика и к третьим входам первого и второго блоков выработки пробных синалов .
2. Система управления по п. 1, отличающаяся тем, .что блок выработки пробных сигналов содержит первый экстраполятор, четвертый задатчик, последовательно вклк ченные второй экстраполятор, шестой блок сравн.ения, детектор знака, блок умножения, второй ограничитель и второй ключ, последовательно включенные блок определения модуля, седьмой блок сравнения и логический блок И, выход которого соединен с управляющим входом второго ключа, а второй вход логи чёского блока И является третьим входом блока выработки пробного сигнала, первым входом которого является вход первого экстраполятора, выход которог подключен к первому входу шестого блока сравнения, вторьм входом явлйется вход второго экстраполятора, выход шестого блока сравнения подключен к входу блока определения модуля, выход четвертого задатчика - к второму входу седьмого блока сравнения, выход которого подключен к другому входу блока умножения, выход второго ключа является выходом блока (выработки пробного сигнала.


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
1. АДАПТИВНАЯ ДВУХЦЕЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая рабочий регулятор, первый датчик, первый задатчик, первый сумматор, первый и второй блоки сравнения, последовательно включенные второй сумматор, первый исполнительный орган, подключенный к первому входу объекта управления, к выходу которого подключен второй датчик и третий сумматор, последовательно включенные испытываемый регулятор, третий блок сравнения, модель объекта по каналу управления, четвертый сумматор, четвертый блок сравнения, первый квадратор и первый фильтр низкой частоты, последовательно включенные пятый блок сравнения, второй квадратор и второй фильтр низкой частоты, причем выход первого исполнительного органа соединен с входом первого датчика, выход первого задатчика соединен с первым входом первого блока сравнения, отличающаяся тем, что, с целью повышения качества проверки функционирования испытываемого регуляторп путем одновременного обеспечения заданных показателей работы объекта управления, внее введены модель объекта по каналу возмущения, первый ограничитель, первый ключ, второй и третий задатчики, задатчик режима работы, структурно-параметрический задатчик, генератор помехи, последовательно включенные первый блок записи-воспроизведения, первый переключатель и первый ёлок выработки пробного сиг- @ нала, последовательно включенные ,тре(Л тий датчик, второй блок записи-воспро изведеНия, второй переключатель и тре тий переключатель, последовательно включенные второй блок выработки пробе ного сигнала и второй исполнительный орган, последовательно включенные третий блок записи-воспроизведения, четвертый переключатель и регистратор последовательно вкл1оченные четвертый 9д блок записи-воспроизведения и пятый О 00 переключатель, выход второго исполнительного органа соединен с вторым входом объекта управления и с входом третьего датчика, выход первого датчика - с первым входом рабочего регулятора, с входом первого блока записи- , воспроизведения и с вторым входом первого переключателя, выход третьего датчика - с вторыми входами рабочего регулятора и второго переключателя, выход второго датчика с третьим Bxofi(OM рабочего регулятора, выход первого сумматора - с четвертым входом рабочего регулятора, с вхо
Изобретение относится к автоматическому управлению и регулированию, может быть использовано для постро- . ения многоцелевых, в частности двух-j
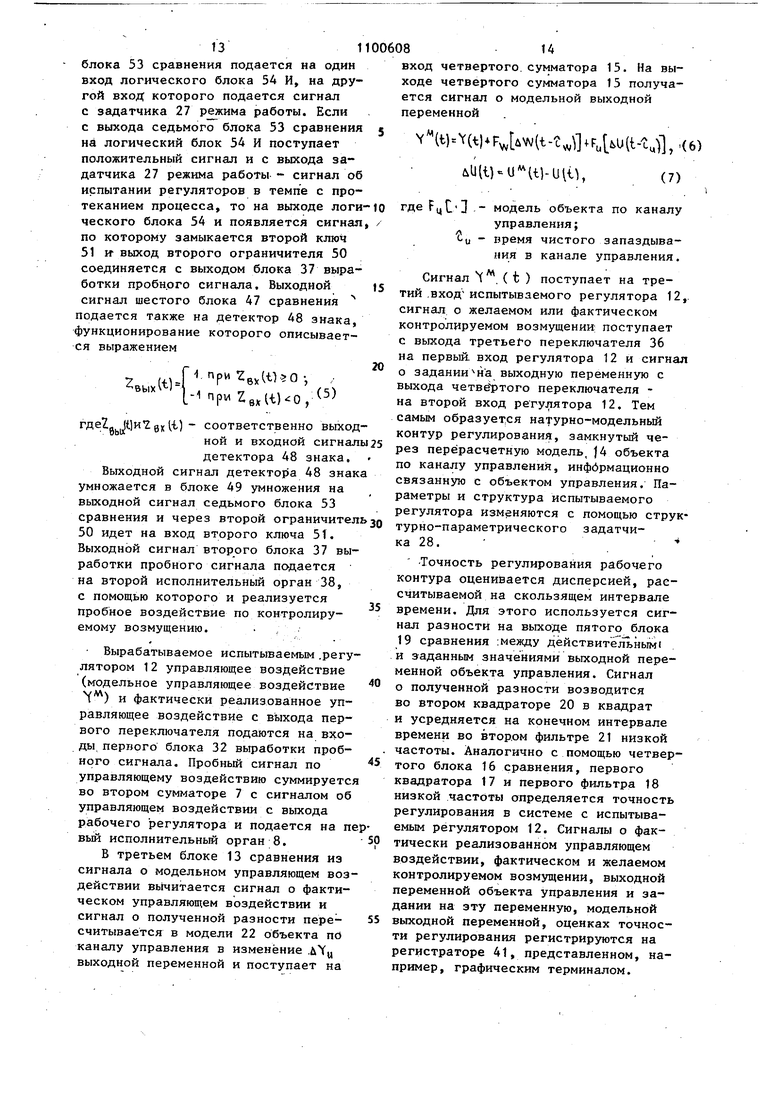
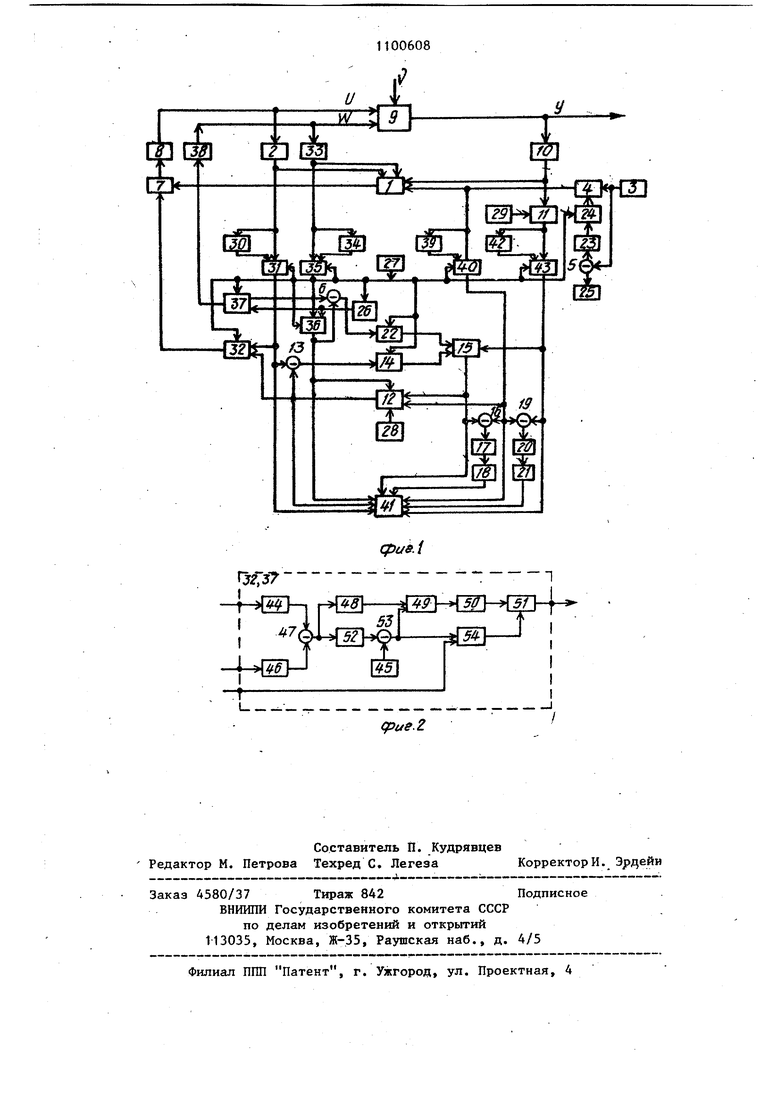
.целевых, систем управления техническими объектами, и предназначено для рабочего регулирования и для испытания новых регуляторов. Известно устройство для моделирования системы управления, предназначенное для испытания регуляторов, со держа1Де(В последовательно включенные первый масштабирующий блок, первый блок сравнения, интегратор, охваченный отрицательной обратной связью, блок запаздывания, второй блок сравнения, второй масштабирующий блок, блок управления, включающий последовательно соединенные регулятор, магнитный пускатель и электродвигатель, и преобразователь угла в напряжение, а также третий масштабирующий блок, причем входы первого и третьего маештабирующих блоков и один вход регулятора являются входами устройства, выход преобразователя угла в напряжение соединен с вторым входом перво го блока сравнения, выход третьего масштабирующего блока подключен к вт рому входу второго блока сравнения l При работе устройства испытываемый блок управления (регулятор) вырабатывает управляющее воздействие в виде угла :поворота. электродвигате ля. Это воздействие, преобразованное в преобразователе угла в напряжение, вычитается в первом блоке сравнения из сигнала о натурном управляющем воздействии. С вьрсода первого блока сравнения сигнал через модель объект в приращениях, представленную последовательным соединением интегратора, охваченного отрицательной обратной связью, и блока запаздывания, поступает на второй блок сравнения, где вычитается из сигнала о натурном выходе объекта управления. С выхода второго блока сравнения сигнал о модельном выходе объекта .управления поступает через второй масштабирующ1й блок на вход регулятора. Недостатком известного устройства является низкая точность моделирования, обусловленная ограниченной зоной работоспособности модели объекта в приращениях, что приводит к низкому качеству проверки функционирования испытываемого регулятора. Наиболее близким к предлагаемому по технической сущности является регулирующее устройство, содержащее рабочий регулятор, первый датчик, первый задатчик, первый сумматор, первый и второй блоки сравнения, последовательно включенные сумматор, первый исполнительный орган, объект управления, второй датчик и третий сумматор, последовательно вклю- ченные испытываемый регулятор, третий блок сравнения, модель объекта по каналу управления, четвертый сумматор, четвертый блок сравнения, первый Квадратор и первый фильтр низкой частоты, последовательно включенные пятый блок сравнения, второй, квадратор и второй фильтр низкой частоты, причем выход первого исполнительного органа соединен с входом первого датчика, выход первого задатчика соединен с первым входом первого блока управления 2, Данное устройство работает следующим образом. I Сначала рассчитываются модельные . управляющие воздействия в первом и втором модельных контурах управления. Для этого в первом модельном контуре управления, составленном из первой модели объекта, первого сумматора, первого блока сравнения, первого фильтра низкой частоты, первого регулятора и второго блока сравнения, выходной сигнал объекта управления в первом сумматоре суммируется с выходным сигналом первой модели объекта и из полученного сигнала b первом блоке сравнения вычитается сигнал о заданном значении выходной переменной объекта управления. Сигнал о полученной разности подается через первый фильтр низкой частоты на первый регулятор, где вырабатывается сигнал о первом модельном управляющем воздействии. Этот сигнал подается на вход второго блока сравнения, в котором из него вычитается сигнал о натурном управляющем воздействии с выхода третьего сумматора. Сигнал с выхода второго блока сравнения идет на вход первой модели объекта. Аналогично вырабатывается второе модельное управление во втором модельном контуре управления, составленном из второй модели объекта, второго сумматора, третьего блока сравнения, второго фильтра низкой частоты, второго регулятора и четвертого блока сравнения. Сигналы о первом и втором модельных управляющих воздействиях умножаются , соответственно в первом и втором блоках умножения на сигналы об оперативно уточняемых весовых коэффициентах и суммируются в третьем сумматоре. В результате получается сигнал о натурном управляющем воздействии. Для оперативного-уточнения весовых коэффициентов с помощью пятого и шестого блоков сравнения, квадраторов и третьего и четвертого фильтров низкой частоты определяются показатели точности регулирования первого и второго модельных контуров управления, а затем с помощью четвертого сумматора и блоков деления рассчитываются текущие значения весовых коэффициентов. Р едостатком данного устройства являются ограниченные функциональные возможности, так как оба модельных контура управления предназначены для рабочего регулирования, а не для испытания хотя бы одного регулятора. Кроме того, небольщая зона работоспособности моделей объекта в прира щениях отрицательно сказывается на точности определения модельных выход ных переменных объекта в том случае, когда разность между модельными и натурными управляющими воздействиями превышает допустимую зону работоспособности модели, что приводит к низкому качеству проверки работы испыты ваемого регулятора. Цель изобретения - обеспечение возможности испытания регуляторов пр одновременном повышении качества желаемого режима функционирования объекта регулирования. Поставленная цель достигается тем, что в регулирующее устройство, содержащее рабочий регулятор, первый датчик, первый задатчик, первый сумматор, первьй и второй блоки сравнения, последовательно включенные второй сумматор, первый исполнительный орган, объект управления, второй датчик и третий сумматор, последовательно включенные испытываемый регулятор, третий блок сравнения, модель объекта по каналу управления, четвертый сумматор, четвертый блок сравнения, первый квадратор и первый фильтр низкой частоты, последователь но включенные пятый блок сравнения, второй квад)атор и второй фильтр низкой частоты, причем выход первого исполнительного органа соединен с входом первого датчика, выход.первого задатчика соединен с первым входом первого блока сравнения, введены модель объекта по каналу возмущения, первый ограничитель, первый ключ, второй и тpetий задатчики, задатчик режима работы, структурнопараметрический задатчик, генератор помехи, последовательно включенные первый блок записи-воспроизведения, первый переключатель и первый блок выработки пробного сигнала, последовательно включенные третий датчик, второй блок записи-воспроизведения, второй переключатель и третий переключатель, последовательно включенные второй блок выработки пробного сигнала и второй исполнительный орган, последовательно включенные третий блок записи-воспроизведения, четвертый переключатель и регистратор, последовательно включенные четвертый блок записи-воспроизведения и пятый переключатель, выход второго исполнительного органа соединен с вторым входом объекта управления и с входом третьего датчика, выход первого датчика с первым входом рабочего регулятора, с входом первого блока записи-воспроизведения и с вторьм входом первого переключателя, выход третьего датчика - с вторыми входами рабочего регулятора и второго переключателя, выход второго датчика - с третьим входом рабочего регулятора, выход первого сумматора - с четвертым входом рабочего регулятора, с входом третьего блока записи-воспроизведения и с вторым входом четвертого переключателя, выход генератора помехи через третий сумматор подключен к входу четвертого блока записи-воспроизведения и к второму входу пятого переключателя, выход второго задатчика через последовательно включенные первый блок сравнения, первьй ограничитель и первый ключ соединен с первым входом первого сумматора, второй вход которого соединен с выходом первого задатчика, выход первого переключателя соединен с вторыми входами третьего блока сравнения и регистратора, выход второго переключателя соединен с первыми входами первого и второго блоков выработки пробного сигнала соответственно, второй выход второго блока выработки пробного сигнала через последовательно включенные второй блок сравнения, модель объекта по каналу возмущения подключен к второму входу четвертого сумматора, выходом соединенного с третьими входами регистратора и испытываемого регулятора, выход третьего задатчика соединен с вторым входом второго блока выработки пробного сигнала и с вторым входом третьего переключателя, выход которого подключен к второму входу второго блока сравнения, к первому входу испытываемого регулятора и к четвертому входу регистратора, выход четвертого переключателя соединен с вторым входом регулятора, с вторым входом четвертого блока сравнения и с первым входом пятого блока сравнения, выход пятого переключателя сог единен с вторым входом пятого блока сравнения, с пятым входом регистратора и с третьим входом четвертого сумматора, дополнительный вход испытываемого регулятора соединен с выходом структурно-параметрического задат чика,а выход - с шестым входом реги-( стратора и с третьим входом первого блока выработки пробного сигнала, выход которого подключен к первому входу второго сумматора, второй вход которого подключен к выходу рабочего регулятора, седьмой и восьмой входы регистратора соединены с выходами соответственно первого и второго фильтров низкой частоты, выход зада чика режима работы подключен к упра ляющим входам пяти переключателей, первого ключа, к дополнительным вхо дам модели объекта по каналу управления и модели объекта по каналу возмущения, третьего задатчика и к третьим входам первого и второго блоков выработки пробных сигналов. Блок выработки пробных сигналов содержит первый экстраполятор, четвертый задатчик. Последовательно включенные второй экстраполятор, шестой блок сравнения, детектор зна ка, блок умножения, второй ограничи тель и второй ключ, последовательно включенные блок определения модуля, седьмой блок сравнения и логический блок И, выход которого соединен с управляющим входом второго ключа, а второй вход логического блока И является третьим входом блока выработки пробного сигнала, первым входом которого является вход первого экстраполятора, выход которого подключен к первому входу шестого блока сравнения, вторым входом является вход второго зкстраполятора, выход шестого блока сравнения подключен к входу блока определения модул выход четвертого задатчика - к второму входу седьмого блока сравнения, выход которого подключен к другому входу блока умножения, выход второго ключа является выходом блока вьфаботки пробного сигнала. В адаптивной двухцелевой системе управления решаются одновременно задачи рабочего регулирования и испытания регуляторов. Разумный компромисс между задачами находится путем установки с помощью вторых ограничителей ограничений на величины пробных сигналов по управляющему воздействию и контролируемому возмущению, а также установки с помощью первого ограничителя ограничений на величину отклонения заданного сигнала, определенного из целей рабочего регулирования. Кроме того, в предлагаемой системе управления увеличена точность моделирования за счет введения пробных сигналов и предусмотрена возможность создания желаемых режимов управления для более представительного испытания регуляторов. На фиг. 1 представлена блок-схема адаптивной двухцелевой системы управления; на фиг-. 2 - схема блока выработки пробных сигналов. На фиг. 1 обозначено: U - управляющее воздействие; W - контролируемое возмущение; Y - выходная переменная объекта управления; - - неконтролируемое возмущение. Предлагаемая система управления содержит рабочий регулятор 1, первый датчик 2, первый задатчик 3, первый сумматор 4, первый и BTopoii блоки 5 и 6 сравнения, второй сумматор 7, первый исполнительный орган 8, объект 9 управления, второй датчик 10, третий сумматор 11, испытываемый регулятор 12, третий блок 13 сравнения, модель 14 объекта по каналу управления, четвертый сумматор 15,четвертый блок 16 сравнения, первый квадратор 17, первый фильтр 18 низкой частоты, пятый блок 19 сравнения, второй квадратор 20, второй фильтр 21 низкой частоты, модель 22 объекта по каналу возмущения, первый ограничитель 23, первьй ключ 24, второй и третий задатчики 25 и 26, задатчик 27 режима работы, структурно-параметрический задатчик 28, генератор 29 по - мехи, первый блок 30 записи-воспроизведения, первый переключатель 31, первый блок 32 выработки пробного сигнала, третий датчик 33, второй блок 34 записи-воспроизведении, второй переключатель 35, третий переклю чатель 36, второй блок 37 вьфаботки пробного сигнала, второй исполнитель ный орган 38, третий блок 39 записивоспроизведения, четвертый переключатель 40, регистратор 41, четвертый блок 42 записи-воспроизведения, пяты переключатель 43. Блок выработки пробных сигналов содержит первый экстраполятор 44, чегтвертый задатчик 45,второй экстраполятор 46, шестой блок 47 сравнения детектор 48 знака, блок 40 умножения второй ограничитель 50, второй ключ 51, блок 32 определения модуля, седь мой блок 53 сравнения, логический блок 54 И. Предлагаемая система управления работает следующим образом. Выходная переменная V объекта 9 управления, контролируемое возмущение W и фактически реализованное управляющее воздействие U измеряют ся соответственно вторым-10, треть. им 33 и первым 2 дат.чиками. Сигналы этих датчиков поступают на входы рабочего регулятора 1, например прогно зирующего регулятора. На один из входов рабочего регулятора 1 подаетс сигнал о заданном значении выходной переменной с выхода первого сумматора 4. Вырабатываемы рабочим регулятором сигнал об управляющем воздействии суммируется во втором сумматоре 7 с пробным сигналом и реализуетс первым исполнительным органом 8. Испытание регуляторов производится в двух режимах: либо в темпе с протеканием процесса (в реальном вре мени), либо в ускоренном масштабе времени по зарегистрированным на пре дистории данным о функционировании рабочего контура регулирования. Запоминание и воспроизведение данных об управляющем воздействии U , контролируемом возмущении V/ , выходной переменной Y и задания на величину этой переменной осуществляются соответственно в первом 30, втором 34, четвертом 42 и третьем 39 блоках записи-воспроизведения, реализованны например, на базе Лногодорсжечных магнитофонов. Контролируемый сигналы о перечисленных переменных с первого 2 и третьего 33 датчиков, а t 810 также с первого сумматора 4 поступают на входы блоков 30, 34 и 39 записи-воспроизведения и на вторые входы первого 31, второго 35 и четвертого 40 переключателей. На второй вход пятого переключателя 43 и на вход четвертого блока 42 записи-воспроизведения идет сигнал с выхода третьего сумматора 11, в котором выходной сигнал второго датчика 10 суммируется с выходным сигналом генератора 29 помех, в результате чего формируется желаемая измерительная помеха. На первые входы переключателей 31, 35, 40 и 43 поступают сигналы с выходов блоков 30, 34, 39 и 42 записи-воспроизведения. Режим испытания (в темпе с протеканием процесса или по предистории) задается с помощью задатчика 27 режима работы, с выхода которого подаются сигналы на управляющие входы переключателей 31, 35, 40 и 43. При испытании регуляторов в темпе с протеканием процесса формируются желаемые режимы работы системы управления путем нанесения специальных пробных сигналов и пересчетов с помощью моделей. Желаемые для испытания регуляторов значения задания на выходную переменную Y устанавливаются вторым задатчиком. Задание же на , исходя из целей рабочего регулирования, устанавливается первым задатчиком 3. Задание рабочему регулятору 1, исходя из двойственной цели, определяется по выражению 4;(tbY5a npHlY;(t)-YjwUS4 npnYjW-YfaV-BY npHYj t)-Yj( (1) где ) - задание рабочему регулятору в момент времени t; Yp(t)MY. (t)- задайие на выходную переменную, исходя из целей рабочего регулирования и испы. тания регуляторов; oY - допустимые отклонения задания ) OTYp(t) . Для реализации выражения (1) в ервом блоке 5 сравнения из сигнала торого задатчика 25 вычитается сигал первого задатчика 3 и сигнал о азности идет через первый ограничитель 23 на вход первого ключа 2, Если задатчиком 27 режима работы задан режим испытания в темпе с протеканием процесса, то первый ключ 2А замыкается и выходной сигнал первого ограничителя 23 суммируется с выходным сигналом первого задатчика 3 и подается на вход рабочего регуля тора 1. Если задан режим испытания по предистории, то первый ключ 2А разомкнут и на вход рабочего регулятора 1 поступает сигнал с выхода первого задатчика 3. Желаемые значения контролируемых возмущений задаются третьим задатчиком 26, выходной сигнал которого идет на второй вход третьего переклю чателя 36. На второй вход третьего переключателя 36 идет выходной сигна второго переключателя 35. В зависимости от сигнала задатчика 27 режима работы на вход тр:ртьего переключателя подключается сигнал либо с выхода второго переключателя 35, либо с выхода третьего задатчика 26. Выходной сигнал задатчика 27 режима работы подае|Тся также на дополнительный вход третьего задатчика 26, который работает в ускоренном масштабе вре мени или в темпе с протеканием процесса. Во втором блоке 6 сравнения из выходного сигнала третьего переклю8v w 1(. .ii гдeW5(t+t,VV(t4c) - экстраполируемые значения желаемых и фактических контро лируемых возмущений; t - интервал экстраполяции, обусловленный запаздыванием во вто ром исполнительном органе 38; oW, - величина, равная половине зоны работоспособности модели объекта по каналу возмущения; g- допустимая величина пробного сигнала. Т.е., если разность между желаемы ми и фактическими значениями лежит в зоне работоспособности модели объе та, то пробный сигнал не наносится, а указанная разность пересчитывается в изменении выходной переменной с 08 .1.2 чателя 36 о желаемом значении контролируемого-возмущения вычитается выходной сигнал второго переключателя 35 о фактическом значении W контролируемого возмущения. Сигнал с выхода второго блока 6 сравнения пересчитывается в изменении вьтходной переменной объекта 9 управления с помощью модели 22 объекта по каналу возмущения. В частности, модель может быть представлена в виде последова.тельного соединения инерционного звена первого порядка и звена чистого запаздывания. Сигнал bXat1 F W(t-t«)l- (2) Cv NitbW(iVW(t), (3) гдер,,д,13- модель объекта по каналу возмущения; время чистого запаздывания по зтому каналу, . поступает на второй вход четвертого сумматора. Сигналы о фактическом и желаемом W,, значениях контролируемых возмущений подаются на первьш и второй входы второго блока 37 выработки пробного сигнала. Пробный сигнал по контролируемому возмущению Sw вырабатывается согласно выражению lw lbn-VJ(bt)U8Ww ((1+1)8 w (i4J:vw itttH помощью модели объекта. Если же эта разность превышает зону работоспособности модели, то наноситсяпробный сигнал в рамках допустимого интервала. Выбором величины этого интервала достигается компромисс между рабочим регулированием и испытанием регуляторов. При выработке пробного сигнала сигналы о желаемом W и контролируемом W возмущениях экстраполируются на интервал времени t во втором 46 и первом А4 экстраполяторах. В шестом блоке 47 сравнения из выходного сигнала второго экстраполятора 46 вычитается выходной сигнал первого экстраполятора 44. Сигнал о полученной разности подается через блок 52 определения модуля на седьмой блок 53 сравнения, где из негр вычитается выходной сигнал четвертого задатчика 45 о SNA/AV . Выходной сигнал седьмого блока 53 сравнения подается на один вход логического блока 54 И, на другой вход которого подается сигнал с задатчика 27 режима работы. Если с выхода седьмого блока 53 сравнения на логический блок 54 И поступает положительный сигнал и с выхода задатчика 27 режима работы - сигнал об испытании регуляторов в темпе с протеканием процесса, то на выходе логи ческого блока 54 и появляется сигнал по которому замыкается второй ключ 51 и- выход второго ограничителя 50 соединяется с выходом блока 37 выработки пробного сигнала. Выходной сигнал шестого блока 47 сравнения подается также на детектор 48 знака, функционирование которого описывается выражением 7 (tbf P exWsO-, ... ,Ze,U)o,5) где1„ .Q(i соответственно выход ной и входной сигнал детектора 48 знака. Выходной сигнал детектора 48 знак умножается в блоке 49 умножения на выходной сигнал седьмого блока 53 сравнения и через второй ограничител 50 идет на вход второго ключа 51. Выходной сигнал второго блока 37 выработки пробного сигнала подается на второй исполнительный орган 38, с помощью которого и реализуется пробное воздействие по контролируемому возмущению. ; Вырабатываемое испытываемым .регу лятором 12 управляющее воздействие (модельное управляющее воздействие ) и фактически реализованное управляющее воздействие с выхода первого переключателя подаются на входы первого блока 32 выработки пробного сигнала. Пробный сигнал по управляющему воздействию суммируетс во втором сумматоре 7 с сигналом об управляющем воздействии с выхода рабочего регулятора и подается на п вьй исполнительный орган 8. В третьем блоке 13 сравнения из сигнала о модельном управляющем воз действии вь1читается сигнал о фактическом управляющем воздействии и сигнал о полученной разности пересчитывается в модели 22 объекта nd каналу управления в изменение выходной переменной и поступает на вход четвертого, сумматора 15. На выходе четвертого сумматора 15 получается сигнал о модельной выходной переменной ) (,uW(,U(t-t,), ,(6) &lllt))-Uli, гдеРцСЗ - модель объекта по каналу управления; и - Время чистого запаздывания в канале управления. Сигнал Ч. ( t ) поступает на третий .вход испытываемого регулятора 12,. сигнал о желаемом или фактическом контролируемом возмущении; поступает с выхода третьего переключателя 36 на первый, вход регулятора 12 и сигнал о задании на выходную переменную с выхода четвёртого переключателя на второй вход регулятора 12. Тем самым образует,ся натурно-модельный контур регулирования, замкнутый через перерасчетную модель, )4 объекта по каналу управления, информационно связанную с объектом управления. Параметры и структура испытываемого регулятора изменяются с помощью структурно-параметрического задатчика 28. -Точность регулирования рабочего контура оценивается дисперсией, рассчитываемой на скользящем интервале времени. Для этого используется сигнал разности на выходе пятого блока 19 сравнения ;между дёйствитё Тьньм и заданным значениями выходной переменной объекта управления. Сигнал о полученной разности возводится во втором квадраторе 20 в квадрат и усредняется на конечном интервале времени во втором фильтре 21 низкой частоты. Аналогично с помощью четвертого блока 16 сравнения, первого квадратора 17 и первого фильтра 18 низкой частоты определяется точность регулирования в системе с испытываемым регулятором 12. Сигналы о фактически реализованном управляющем воздействии, фактическом и желаемом контролируемом возмущении, выходной переменной объекта управления и задании на зту переменную, модельной выходной переменной, оценках точности регулирования регистрируются на регистраторе 41, представленном, например, графическим терминалом.
Г5гГз7
qpifs.i
(puff.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Солесос | 1922 |
|
SU29A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2961396, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
