;О
СХ 00 ОО
Изобретение относится к системам автоматического управления нестационарными объектами, адаптивным по отношению к переменным параметрам объекта управления, и может быть использовано при создании электромеханического обеспечения роботов и манипуляторов, отдельные параметры которых (масса, момент инерции) переменны во времени.
Цель изобретения - повышение точности управления за счет адаптации системы автоматического управления к переменным параметрам объекта управления и улучшение помехозаш,ищенности системы.
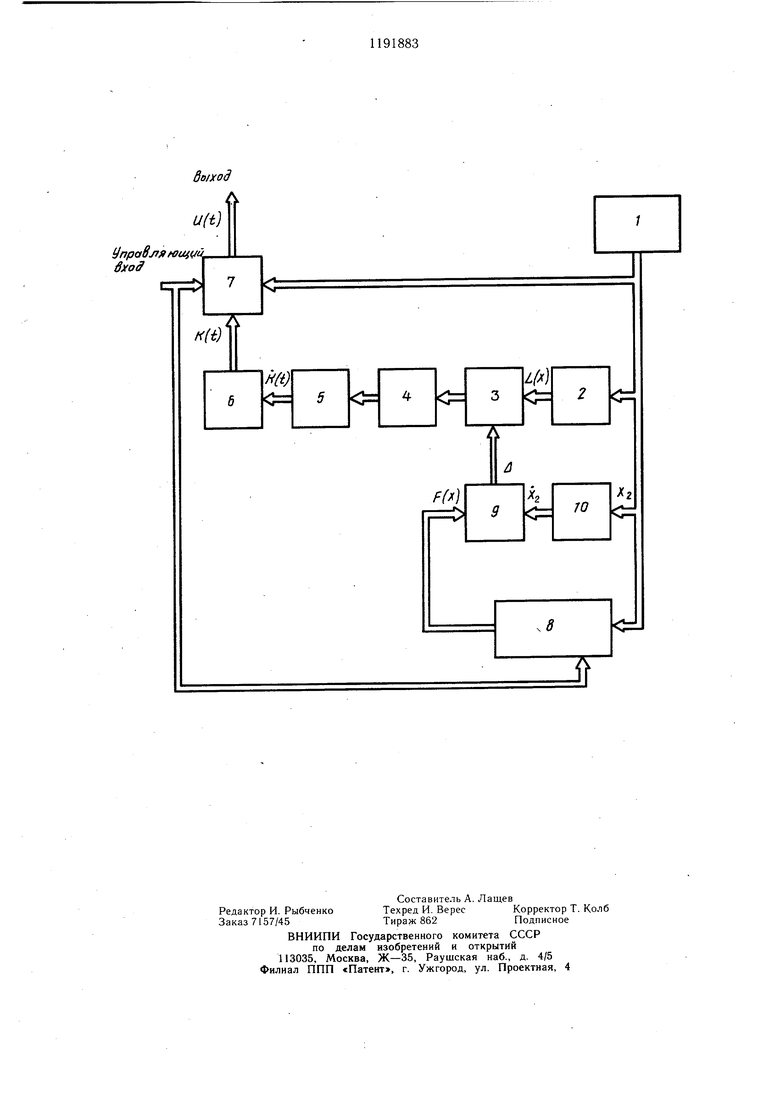
На чертеже представлена функциональная схема системы управления нестационарными объектами.
Система содержит блок 1 датчиков координат состояния объекта, последовательно соединенные блок 2 формирования вспомогательной функции, блок 3 умножителей, блок 4 двухпозиционных реле, блок 5 усилителей, блок 6 интеграторов и адаптивный регулятор 7, последовательно соединенные блок 8 формирования функции, желаемого поведения объекта управления и блок 9 сравнения, выходы которого соединены с вторыми входами блока 3 умножителей, блок 10 дифференцирования. Выходы блока 10 дифференцирования подключены к вторым входам блока 9 сравнения. Управляющий вход системы подключен к вторым входам блока 8 формирования функции желаемого поведения объекта и адаптивного регулятора 7, выходы которого являются выходами системы. Выходы блока 1 датчиков координат состояния объекта подключены к третьим входам адаптивного регулятора 7, к входам блока 2 .формирования вспомогательной функции, блока 10 дифференцирования и первым входам блока 8 формирования функции желаемого поведения объекта управления.
В системе управления нестационарными объектами блок 2 формирования вспомогательной функции, блок 3 умножителей, блок 4 двухпозиционных реле, блок 5 усилителей и блок 6 интеграторов образуют контур подстройки коэффициентов адаптивного регулятора.
Выполнение блока 2 формирования вспомогательной функции зависит от ида функции L(x). Блок 2 может быть выполнен, например, в виде суммирующего усилителя. Блок 3 умножителей может быть выполнен в виде совокупности или одного блока умножения двух переменных величин, в качестве которого можно использовать серийно выпускаемый интегральный перемножитель 525ПСЗ. Адаптивный регулятор 7 в частно.-vi случае может быть выполнен в виде последовательно соединенных суммирующего усилителя, блока умножения и сумматора. Выполнение блока 8 формирования функции желаемого поведения объекта управления зависит от требований, предъявляемых к объекту управления. Так, блок 8 может быть выполнен в виде последовательно соединенных суммирующих усилителей серии 140. Блок 10 дифференцирования может быть представлен в виде последовательно соединенных устройства сравнения, усилителя, интегратора, выход которого соединен с одним из входов устройства сравнения. Система управления нестационарными объектами работает следующим образом. Пусть в начальный момент времени система находится в стационарном состоянии. Поскольку выходные сигналы блоков 8
0 и 10 равны между собой, т.е. F(x) Х2, то на выходе блока 9 сигнал отсутствует F(x)-Х2 0. Теперъ предположим, что состояние ОУ изменилось таким образом, что параметр, отражающий изменение свойств ОУ во времени, увеличился. Это приводит к изменению координат состояния ОУ и, следовательно, к изменению выходного сигнала блока 1, поступающего на входы блоков 8 и 10. Блок 9 сравнивает выходные сигналы блоков 8 и 10 (F(x)
0 и Хг) и формирует сигнал , поскольку изменение A(t) приводит к изменению х Сигнал с выхода блока 1 поступает на вход , блока 2, формирующего сигнал L(x), который умножается в блоке 3 на сигнал Д . Сигнал с выхода блока 3 поступает на
5 вход блока 4. Выходной сигнал последнего определяетсязнакомпроизведения
L(x)- л и равен в данном случае 1. Выходной сигнал блока 4 усиливается блоком 5, а затем интегрируется блоком 6. На выход де блока б формируется уменьшающийся сигнал K(t), который задает коэффициент адаптивного регулятора 7. Последний формирует управляющее воздействие U(t), поступающее на вход ОУ. Уменьшение сигнала K(t) происходит до тех пор, пока
5 сигнал не станет равным 0. В момент, когда Р(х) Хг (сигнал Д 0) перестройка коэффициента регулятора прекращается.
Моделирование показало, что система управления нестационарными объектами менее чувствительна к помехам и характеризуется более высокой точностью управления за счет адаптации системы к переменным параметрам объекта управления.
У правjjft мгицп, dxaff
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Система управления | 1983 |
|
SU1120283A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами | 2015 |
|
RU2624489C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2620726C1 |
СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ОБЪЕКТАМИ, содержащая блок усилителей, последовательно соединенные блок формирования желаемого поведения объекта и блок сравнения, вторые входы которого соединены с соответствующими выходами блока дифференцирования, блок датчиков координат состояния объекта управления, выходы которого соединены с соответствующими входами блока дифференцирования и первыми входами блока формирования функции желаемого поведения объекта, вторые входы которого являются управляющими входами системы, отличающаяся тем, что. с целью повыщения точности управления за счет адаптации системы автоматического управления к переменным параметрам объекта управления и улучщения помехозащищенности системы, в нее введены адаптивный регулятор, блок интеграторов, последовательно соединенные блок формирования вспомогательной функции, блок умножителей, блок двухпозиционных реле, при этом выходы блока интеграторов соединены с первыми входами адаптивного регулятора, вторые входы которого подключены к управляющим входам системы, а выходы являются выходами системы, выходы блока датчиков координат состояния объекта управления соединены с третьими i входами адаптивного регулятора и соответствующими входами блока формирова(Л ния вспомогательной функции, выходы блока двухпозиционных реле соединены с входами блока усилителей, выходы которого подключены к соответствующим входам блока интеграторов, выходы блока сравнения соединены с вторыми входами блока умножителей.
F(
| Востриков А | |||
| С | |||
| Управление динамическими объектами | |||
| Новосибирск, НЭТИ, 1979, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
