Настоящая заявка относится в первую очередь к функциональной медицинской визуализации. Она находит конкретное применение в ситуациях, в которых желательно идентифицировать и учитывать неопределенность, возникающую в результате шума и других источников ошибок в информации функциональной визуализации.
Технологии медицинской визуализации стали важнейшими средствами в диагностике и лечении заболеваний. Одним аспектом медицинской визуализации, который привлек значительное внимание, стала функциональная визуализация, которая предоставляет информацию по функциональным параметрам, важным для диагностики и/или лечения.
Функциональная визуализация, в общем, влечет за собой формирование параметрических карт интересующего параметра. Одним примером этого является применение изображений FMISO-PET в онкологических исследованиях, где функциональный связанный с гипоксией параметр используется для того, чтобы различать более и менее агрессивные части опухоли. Другой пример включает в себя исследования сердечной деятельности на базе PET или SPECT, где параметрические карты функциональных связанных с перфузией параметров используются для того, чтобы идентифицировать гипоперфузные области миокарда. Другими примерами является функциональная магнитно-резонансная визуализация (fMRI), которая особенно полезна для предоставления информации, важной для функции мозга, и молекулярная визуализация, которая предоставляет информацию о молекулярном маркере или агенте.
Тем не менее одним осложняющим фактором стал эффект шума и другие неопределенности. Хотя основанные на вокселах оценки параметров предоставляют относительно более высокое пространственное разрешение, эти оценки особенно подвержены эффектам шума в базовых данных изображений. Если они не учитываются, эффекты такого шума могут приводить к неоптимальной диагностике или лечению.
Использовались методики сглаживания для того, чтобы уменьшить эти флуктуации параметров, возникающие в результате таких факторов, как шум визуализации, шум моделирования и разреженность данных. Одной популярной методикой сглаживания является кластеризация, при которой интересующая область или объем разделяется на смежные и несмежные подобласти, имеющие похожие значения параметров. Задается требуемое число кластеров, и алгоритм кластеризации используется для того, чтобы разделить область на указанное число кластеров. Так называемые области, в свою очередь, используются для диагностики (к примеру, определения размера опухоли или ишемической области в миокарде) и/или терапии (к примеру, определения дозы облучения при планировании лучевой терапии).
Тем не менее, один недостаток вышеуказанной методики заключается в том, что число и/или распределение кластеров может быть ненадлежащим, приводящим к неоптимальной кластеризации. Неоптимальная кластеризация, в свою очередь, может приводить к неоптимальной диагностике и/или лечению.
Соответственно, желательно предоставить усовершенствованные методики учета эффектов шума и других неопределенностей в функциональной визуализации.
Аспекты настоящего изобретения разрешают эти и другие проблемы.
Согласно первому аспекту настоящего изобретения способ включает в себя прием данных функциональных изображений, указывающих интересующую область объекта, причем данные функциональных изображений включают в себя значение пространственно варьирующегося функционального параметра и модель пространственно варьирующихся функциональных ошибок. Способ также включает в себя секционирование интересующей области в зависимости от модели пространственно варьирующихся ошибок и формирование изображения, указывающего секционированную интересующую область.
Согласно первому аспекту настоящего изобретения устройство включает в себя средство приема данных функциональных изображений, указывающих интересующую область объекта, причем данные функциональных изображений включают в себя значение пространственно варьирующегося функционального параметра и модель пространственно варьирующихся функциональных ошибок. Способ также включает в себя средство секционирования интересующей области в зависимости от значения пространственно варьирующейся ошибки и средство формирования изображения, указывающего секционированную интересующую область.
Согласно другому аспекту изобретения машиночитаемый носитель записи содержит инструкции, которые, когда приводятся в исполнение посредством компьютера, инструктируют компьютер осуществлять способ, который включает в себя прием данных функциональных изображений, указывающих интересующую область объекта, и кластеризацию данных функциональных изображений на множество кластеров. Данные функциональных изображений включают в себя функциональные значения и модель функциональных ошибок. Число кластеров является функцией от модели функциональных ошибок в функциональных значениях, включенных в кластер.
Согласно другому аспекту изобретения машиночитаемый носитель записи содержит инструкции, которые, когда приводятся в исполнение посредством компьютера, инструктируют компьютер осуществлять способ, который включает в себя прием данных функциональных изображений, указывающих интересующую область объекта, использование модели пространственно варьирующихся функциональных ошибок для того, чтобы пространственно варьировать пространственное разрешение данных функциональных изображений, и формирование изображения, указывающего данные функциональных изображений.
Согласно другому аспекту изобретения способ включает в себя прием данных функциональных изображений, указывающих интересующую область, отображение данных функциональных изображений в воспринимаемой человеком форме в GUI и интерактивное секционирование интересующей области на основе модели функциональных ошибок и оценки человеком отображаемых данных функциональных изображений.
Специалисты в данной области техники должны признавать еще одни другие аспекты настоящего изобретения при понимании прилагаемых чертежей и описания.
Настоящее изобретение проиллюстрировано в качестве примера, а не ограничения, на рисунках прилагаемых чертежей, на которых аналогичные ссылки обозначают аналогичные элементы, из которых:
Фиг.1 иллюстрирует этапы секционирования объема изображения;
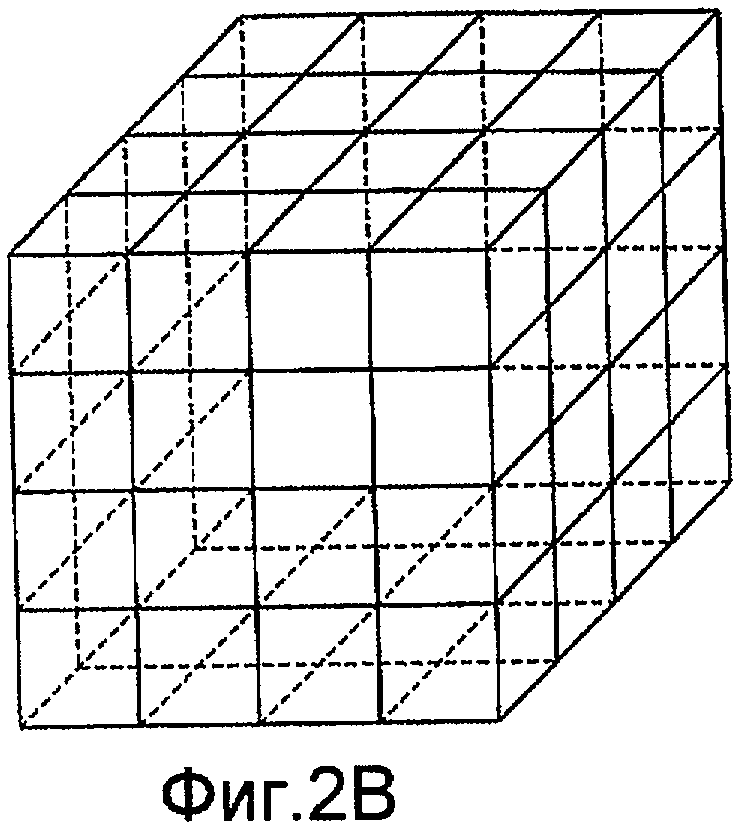
Фиг.2А, 2В, 2С и 2D иллюстрируют объем изображения на различных стадиях двухэлементного секционирования;
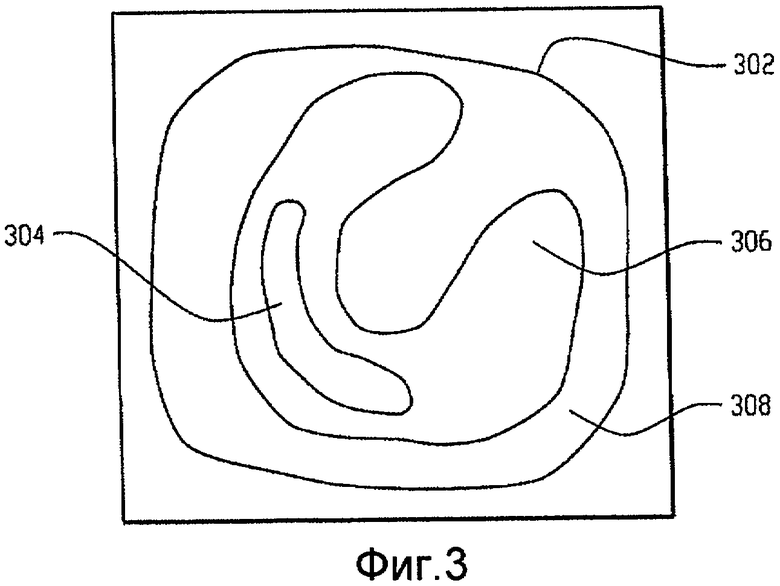
Фиг.3 иллюстрирует множество кластеров.
Параметрические карты и функциональная информация, извлеченная из практических процедур визуализации, таких как PET, SPECT или fMRI, могут иметь существенную ошибку или неопределенность вследствие шума в базовых данных изображения. Шум значения функционального параметра, в общем, связан с размером области, в которой он оценивается. Основанные на вокселах оценки показывают наивысшие уровни пространственного разрешения, но, в общем, имеют большую неопределенность или доверительные интервалы в отображаемых значениях. Хотя уменьшение пространственного разрешения стремится уменьшить неопределенность и, следовательно, сузить доверительные интервалы, пространственные детали могут быть потеряны.
Эти эффекты могут быть улучшены за счет адаптивного варьирования пространственного разрешения оценки параметров в объеме изображения или другой интересующей области в зависимости от ошибки. Пространственное разрешение может варьироваться согласно требуемым критериям оптимизации ошибок, например, чтобы добиться требуемой ошибки или требуемого распределения ошибок в интересующей области. Выполнение этого во многих случаях может улучшить визуализацию данных или предоставить иную информацию, которая полезна для диагностики и лечения.
На методики кластеризации также могут оказывать влияние ошибки или неопределенности базовых функциональных данных, особенно когда число кластеров устанавливается априори. Например, предшествующая спецификация числа кластеров может приводить к кластеризации результатов, для которых среднее значение функционального параметра в двух или более кластерах может приводить к статистически незначимым отклонениям. Следовательно, разделение между двумя или более из кластеров может не быть физиологически и/или статистически значимым. С другой стороны, характеристики данных могут быть таковы, что могут быть установлены дополнительные значимые кластеры.
Эти эффекты могут быть улучшены за счет включения показателя ошибки в качестве части процедуры кластеризации и использования этого показателя для того, чтобы адаптивно корректировать число кластеров как функцию от ошибки. Например, ошибка может быть использована для того, чтобы оценивать значимость операции кластеризации и корректировать число кластеров соответствующим образом. Выполнение этого во многих случаях может улучшить разделение на кластеры, тем самым улучшая визуализацию данных или предоставляя иную информацию, которая полезна для диагностики и лечения.
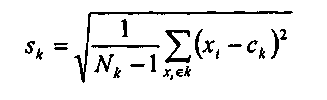
Примерная итеративная процедура секционирования объема или другой интересующей области в зависимости от ошибки показана на фиг.1.
Данные функциональной визуализации, такие как параметрическая карта, принимаются на этапе 102. Данные функциональной визуализации типично включают в себя значение f(x, y, z) пространственно варьирующегося функционального параметра и ассоциативно связанную модель e(x, y, z) пространственно варьирующихся ошибок, которые варьируются по объему изображения.
Когда интересующая область является поднабором объема изображения, необязательный этап выбора интересующей области выполняется на этапе 104. Интересующая область может быть выбрана оператором, например, посредством отображения объема в воспринимаемой человеком форме и запрашивания того, чтобы пользователь указал требуемую область. Интересующая область также может быть определена посредством сегментации или других методик обработки изображений либо в одиночку, либо в связи с вводом оператора.
Начальное секционирование Р0 интересующей области выбирается на этапе 106. Более конкретно, интересующая область делится на одну или более подобластей. В одной реализации подобласти устанавливаются пространственно, например, посредством двухэлементного секционирования набора данных. В другой реализации подобласти устанавливаются с помощью методики кластеризации или наращивания областей.
На этапе 108 текущая секция Рn модифицируется согласно основанной на ошибках стратегии секционирования, чтобы сформировать новую секцию Pn+1.
Новая секция оценивается согласно основанному на ошибках критерию одобрения на этапе 110. В одной реализации секционирование осуществляется так, чтобы оценки ошибок различных подобластей минимизировались или иным образом были меньше требуемого порогового значения. В другом варианте секционирование осуществляется так, чтобы различные подобласти имели требуемую однородность ошибок, например, так, чтобы разность между значениями ошибок в различных подобластях минимизировалась или иным образом была меньше требуемого порогового значения (или говоря по-другому, так, чтобы однородность ошибок максимизировалась).
Стратегия оптимизации и критерии одобрения также могут учитывать функциональные параметры при выполнении секционирования соответствующим образом. В качестве одного примера, критерии одобрения также могут учитывать как варьирование значений вокселов, так и оценки ошибок функциональных параметров в конкретной подобласти или по нескольким подобластям.
На этапе 112, если критерий одобрения не удовлетворен, обработка возвращается на этап 108, где объем интересующей области повторно секционируется. Если критерий одобрения удовлетворен, секционирование одобряется.
Предлагаемое секционирование необязательно может быть представлено оператору на одобрение. В зависимости от реализации оператор может отклонить предлагаемое секционирование, и в этом случае предыдущее секционирование одобряется. Альтернативно, оператор может выбрать одобрить новое секционирование, даже если критерии одобрения не удовлетворены. Оператору также может быть предоставлена возможность вручную модифицировать секционирование.
Предлагаемое секционирование может быть представлено оператору различными способами. Например, подобласть, с которой должны осуществляться действия, может быть выделена посредством цветового кодирования, посредством мигания, чередующихся визуализаций или других графических методик с использованием графического пользовательского интерфейса (GUI). Альтернативно или дополнительно, такая информация, как гистограммы, цифровые индикации значений параметров и/или ошибок и текстовые сообщения, также может быть представлена.
Одобренное секционирование визуализируется на этапе 114, например, посредством отображения параметрической карты в воспринимаемой человеком форме на компьютерном дисплее или мониторе. Альтернативно или дополнительно, данные могут быть использованы в качестве ввода в автоматизированную диагностическую программу или процедуру планирования терапии, чтобы помочь в диагностике или в планировании курса лечения.
Далее описывается примерное секционирование, в котором пространственное разрешение интересующей области варьируется как функция от ошибки. P означает полное секционирование объема или интересующей области, т.е. набор из наборов S по p вокселов:
Уравнение 1
P = {S1, ..., SP},
Уравнение 2
Si = {(x1, y1, z1), ..., (xNi, yNi, zNi)}, i = 1, ..., P.
Каждый набор вокселов Si задает область, состоящую из Ni вокселов, для которых функциональный параметр f(Si) и его ошибка e(Si) могут быть вычислены:
Уравнение 3
{f(S), e(S)} = F(S),
где F представляет процедуру оценки параметров с помощью оцененного значения функционального параметра f и ассоциативно связанной модели функциональных ошибок e, сформированной посредством модели функциональной визуализации.
Ошибка в значениях параметров может быть уменьшена посредством усреднения по более крупной области. Наименьшей возможной областью является один воксел, тогда как наибольшей возможной областью является весь объем. Объем секционируется таким образом, чтобы ошибка для значений параметров удовлетворяла требуемым критериям одобрения.
Как описано выше, допускаются различные стратегии оптимизации и критерии одобрения. Например, объем может секционироваться согласно стратегии минимизации функциональных ошибок так, чтобы функциональная ошибка в каждой подобласти была меньше максимального порога ошибки:
Уравнение 4
e(Si) ≤ emax , i = 1, ..., P.
Если ошибка достаточно мала, пространственное разрешение не уменьшается дополнительно. Другим подходом является минимальная ошибка:
Уравнение 5
e(Si) → min, i = 1, ..., P.
Пространственное разрешение всегда согласуется с минимизацией ошибок.
Другой подход фокусируется на однородности ошибок среди подобластей с тем, чтобы варьирование функциональных ошибок среди двух или более подобластей минимизировалось. Например, объем может быть секционирован так, чтобы варьирование ошибок было меньше порогового значения:
Уравнение 6
 ,
,
где ethresh - это максимальное варьирование. Варьирование функциональной ошибки также может быть минимизировано:
Уравнение 7
 .
.
Последние методики согласуют пространственное разрешение с однородностью ошибок.
Отметим, что вышеприведенное пояснение ориентировано на оптимизацию по всему объему. Оптимизация также может быть ограничена областью или другим интересующим вложенным объемом. Различные критерии одобрения также могут быть установлены для различных частей объема или области. Пороговые значения также могут быть установлены как функция от значений функциональных параметров f.
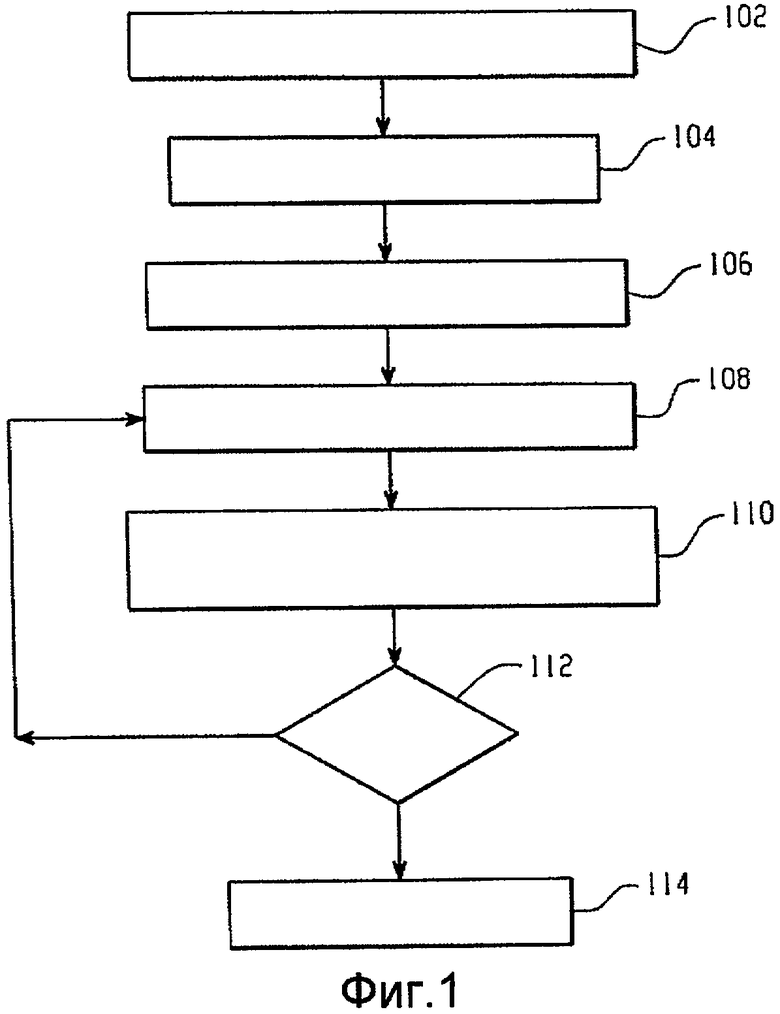
Далее описывается примерная стратегия двухэлементного секционирования со ссылкой на фиг.2. Первоначальный объем 202 показан на фиг.2A. Объем 202 включает в себя множество вокселов 204, каждый из которых имеет значение функциональных параметров f и модель функциональных ошибок e. Фиг.2B и 2C иллюстрируют двухэлементное разложение второго и третьего уровня объема на вложенные области для областей с относительно более приблизительным пространственным разрешением, соответственно. Когда цель заключается в том, чтобы варьировать разрешение как функцию от распределения ошибок, значения функциональных параметров предпочтительно вычисляются на каждом уровне разрешения. Хотя разложение третьего уровня показано для простоты иллюстрации, также может быть реализовано большее (к примеру, четыре или более) или меньшее число уровней.
Выбирается самое приблизительное разрешение (т.е. разрешение по фиг.2C в настоящем примере). При этом секция может быть протестирована на предмет критерия одобрения, чтобы определить то, был ли он уже удовлетворен. Секции модифицируются посредством разложения каждой подобласти, которая не находится уже на наивысшем уровне разрешения (т.е. уровне по фиг.2A в настоящем примере), до более высокого разрешения. Предложенная модификация тестируется для того, чтобы определить, продвигается ли она в направлении критерия одобрения. После того как критерий одобрения удовлетворен для всех вложенных областей (или если дополнительные секции не предложены), текущая секция одобряется, и процесс завершается.
Примерное окончательное разложение показано на фиг.2D. Как проиллюстрировано, нижняя часть 206 объема имеет относительно низкое разрешение, центральная часть 208 объема имеет относительно высокое разрешение, а остаток верхней части 210 имеет промежуточное разрешение. Как можно видеть, объем демонстрирует пространственно варьирующееся пространственное разрешение.
Как описано выше, секционирование может выполняться интерактивно посредством GUI или иным образом с тем, чтобы пользователь имел возможность одобрить, отклонить или иным образом модифицировать предложенную секцию. Также может быть полезным хранить историю (или частичную историю) процесса секционирования. История затем может выступать в качестве быстрого изменения секции в интерактивном сценарии. История также может быть использована для того, чтобы предоставлять секционирование на основе предыдущих решений, например, для использования в адаптивном лечении лучевой терапией (т.е. повторяющейся визуализации). Хотя вышеприведенный пример поясняет стратегию двухэлементного секционирования, могут быть использованы стратегии кластеризации, наращивания областей или недвухэлементные стратегии.
Примерная стратегия секционирования, которая использует кластеризацию для того, чтобы варьировать число кластеров как функцию от ошибки модели e и статистической модели s, далее описывается в связи с фиг.3. Ниже ошибка функционального параметра x в вокселе i обозначается как e i. Значение функционального параметра x в вокселе i, таким образом, равно (x i ±e i ).
Секционирование может выполняться с помощью K-Means или других известных алгоритмов кластеризации. Алгоритм K-Means может быть представлен следующим образом:
Начать инициализировать: n, NC, μ 1 , μ 2 , ..., μ c
Выполнить классификацию n выборок согласно ближайшему μ i
пересчитать μ i
Пока нет изменений в μ i
Вернуть μ 1 , μ 2 , ..., μ c
Конец,
где n - это размер выборки, NC - это заранее заданное число кластеров, а μ c - это значения центров кластеров. Другие методики кластеризации, например известный алгоритм K-Harmonic Means (который является относительно менее чувствительным к начальным условиям) или известный алгоритм Genetic Clustering (который устанавливает число кластеров NC на основе значений параметров f), также могут быть использованы.
Классификация выборки x i согласно ближайшему центру кластера c j выполняется с помощью надлежащего показателя расстояния d, где l представляет векторные компоненты данных:
Уравнение 8
 ,
,
где ρ - это экспонент взвешивания для того, чтобы корректировать значение расстояния, к примеру, ρ = 1: городской квартал (L1), ρ = 2: эвклид (L2). Веса w k дополнительно могут уточнять показатель и могут отражать продолжительность кадра в случае динамических данных.
Как показано на фиг.3, примерная кластеризация интересующей области 302 может предоставлять в результате первый 304, второй 306 и третий 308 кластеры. Значение функциональных параметров (вычисленное как среднее, усредненное, другая функция от вокселов в кластере) центров кластеров может быть представлено как 304c, 306c и 308c, а ошибка функциональных значений - как e304 c , e306 c и e308 c. Если, к примеру, значение параметров второго кластера 306 попадает в рамки пределов ошибки третьего кластера 308:
Уравнение 9
308c - e308 c < 306 c < 308 c + e308 c ,
то, как правило, нежелательно отличать второй 306 и третий 308 кластеры для целей диагностики и лечения, и меньшее число кластеров должно быть предоставлено (т.е. кластеры должны быть объединены). С другой стороны, если статистические и физиологические характеристики данных таковы, что дополнительно выделение одного или более кластеров должно предоставить дополнительную информацию, значимую для диагностики и лечения, то должно быть выделено большее число кластеров.
Статистическая ошибка s значений параметров x в кластере k может быть выражена как среднеквадратическое отклонение значений вокселов x, принадлежащих кластеру k:
Уравнение 10
 ,
,
где sk - это среднеквадратическое отклонение, ck - это центр кластера, а Nk - это число вокселов или элементов в кластере k. Отметим, что распределение параметра x также может быть выражено как среднее, медиана или другая функция.
В настоящем примере модель функциональных ошибок e и статистическая ошибка s, обе, используются для того, чтобы осуществлять доступ к разделению кластеров и корректировать число кластеров, и стратегия объединения/разделения используется для того, чтобы варьировать число кластеров. Псевдокод примерной стратегии объединения/разделения верхнего уровня может быть выражен следующим образом:
FOR j = 1 TO NC
FOR i = 1 TO NC
ЕСЛИ i != j И функциональное значение (μ i-e i) < μ i < (μ i+e i), ТО объединить кластер i и j
ЕСЛИ s j > α • e j , ТО разделить кластер j
ПОКА больше нет изменений выделения кластеров,
где α - это эмпирически определяемая константа. Как упоминалось выше, операции объединения и разделения могут выполняться автоматически или подтверждаться посредством взаимодействия с пользователем.
Далее подробнее описывается примерное объединение кластеров. Если, например, функциональное значение μ j кластера j попадает в пределы планок ошибок (μ i-e i) кластера i, то алгоритм предлагает объединение кластеров i и j. Одна реализация следующая:
Начать инициализировать: n, NC, μ 1 , μ 2 , ..., μ c
Выполнить k-means или другую кластеризацию, дающую в результате центры кластеров μ' 1 , μ' 2 , ..., μ' c0
Если для любых двух кластеров i и j μ' i-e' i < μ' j < μ' i+e' i , то предложить объединить кластеры i и j
Если пользователь одобряет, то задать NC -> NC-1 и вычислить среднее кластеров i и j
Повторно выполнить кластеризацию
Пока центры кластеров не станут явными в отношении модели ошибок e
Вернуть оцененные центры кластеров
Конец.
Альтернативные критерии, включающие в себя статистическое распределение s, также предполагаются.
В примере по фиг.3 процедура кластеризации выполнена с тремя кластерами 304, 306, 308. Если функциональные значения в первом 304 и втором 306 не могут быть отличены в отношении модели функциональных ошибок e, два кластера объединяются.
Процедура кластеризации затем повторно запускается с уменьшенным числом кластеров.
Далее подробнее описывается примерное разделение кластеров. Если статистическая ошибка sk кластера k больше функциональной ошибки ek, то алгоритм может предложить разделить кластер k:
Начать инициализировать: n, NC, μ 1 , μ 2 , ..., μ NC
Выполнить k-means или другую кластеризацию, дающую в результате центры кластеров μ 1 ', μ' 2 , ..., μ' c0
Если для любых кластеров k: e k <c * s k и N k > Θ, то предложить разделить кластеры k
Если пользователь одобряет, то установить NC ->NC+1 и μ k = μ' k - ε, μ k+1 = μ' k + ε
Выполнить повторно алгоритм кластеризации k-means
Пока не остается дополнительного разделения
Вернуть оцененные центры кластеров
Конец.
Выше, c и Θ - это эмпирически определяемые константы, а ε - это вектор малых возмущений. Отметим, что объединение и разделение кластеров может комбинироваться при необходимости.
В примере по фиг.3, если статистическая ошибка первого кластера 304 большая в сравнении с моделью функциональных ошибок e, то число кластеров увеличивается, и процедура кластеризации запускается снова при первом кластере 304, разделенном на два кластера.
Как описано выше, предлагаемое объединение и разделение кластеров может быть представлено оператору на одобрение. Таким образом, кластеры могут выделяться посредством цветового кодирования, чередующихся визуализаций кластеров, мигания, текстовых сообщений и т.п. Статистические данные, такие как гистограммы, функциональные значения μ i и/или функциональные ошибки e i для одного или более кластеров, также могут быть представлены. Пользователь затем может решить одобрить или отклонить предложенную новую секцию, выполнить алгоритм кластеризации со скорректированным числом кластеров или одобрить результат и завершить процесс.
Методики, описанные выше, оптимально подходят для данных, сформированных посредством PET, SPECT, fMRI, функциональной CT или других сканеров, которые могут предоставлять функциональную информацию. Методики также оптимально подходят для использования с данными, сформированными с помощью молекулярной визуализации, которая предоставляет информацию по другим функциональным характеристикам, таким как потребление глюкозы (к примеру, FDG PET), разрастание клеток (к примеру, FLT PET), апоптоз (к примеру, Annexin-V) и плотность рецепторов (в мозгу или где-либо еще).
В лучевой терапии и других вариантах применения, где анатомическая локализация является важной, пациент также может быть просканирован с помощью MRI, компьютерной томографии (CT), ультразвука (US), рентгеновских лучей или другого сканера, и функциональные и анатомические данные совместно регистрируются. В некоторых случаях (к примеру, в случае MR и fMRI) функциональная и анатомическая информация может быть получена в одной процедуре сканирования. Также предполагается использование гибридных сканеров, таких как гибридные PET/MR, PET/CT, SPECT/CT или другие гибридные модальности.
Данные из модальности функциональной визуализации моделируются с помощью надлежащей физической модели, чтобы сформировать одну или более параметрических карт, и данные обрабатываются так, как описано выше. Результирующие данные могут быть использованы посредством врача или пользователя в связи с диагностикой или планированием курса лечения. Результирующие данные также могут быть использованы в качестве входа в систему планирования лечения. В примерном случае пакета планирования лучевой терапии (RTP) данные используются для того, чтобы планировать дозу облучения, например, посредством предоставления относительно более высокой дозы облучения для относительно более устойчивых к излучению частей опухоли.
Варианты осуществления изобретения, описанные выше, могут быть материально осуществлены в компьютерной программе, сохраненной в машиночитаемом носителе записи. Компьютерная программа содержит инструкции, которые, когда считываются и приводятся в исполнение компьютером, инструктируют компьютер выполнять этапы, необходимые для того, чтобы привести в исполнение этапы или элементы настоящего изобретения. Примерные машиночитаемые носители записи включают в себя, но не только, стационарные жесткие диски, оптические диски, магнитные ленты, полупроводниковые запоминающие устройства, такие как постоянные запоминающие устройства (ROM), оперативные запоминающие устройства (RAM) и программируемые (PROM). Запоминающее устройство, содержащее машиночитаемый код, используется посредством приведения в исполнение кода непосредственно из запоминающего устройства или посредством копирования кода из одного запоминающего устройства в другое запоминающее устройство, или посредством передачи кода по сети для удаленного приведения в исполнение.
Очевидно, что модификации и изменения должны приходить на ум после прочтения и понимания вышеприведенного описания. Изобретение должно трактоваться как включающее в себя все подобные модификации и изменения постольку, поскольку они попадают в рамки области применения прилагаемой формулы изобретения или ее эквивалентов.

Изобретение относится к области функциональной медицинской визуализации. Техническим результатом является повышение эффективности функциональной медицинской визуализации за счет учета эффектов шума и других неопределенностей в функциональной визуализации. Способ для применения в функциональной медицинской визуализации включает в себя адаптивное секционирование данных изображения как функции от пространственно варьирующейся модели ошибок. Данные функциональных изображений секционируются согласно стратегии оптимизации. Данные могут быть визуализированы или использованы для того, чтобы планировать курс лечения. В одной реализации данные изображений секционируются так, чтобы варьировать свое пространственное разрешение. В другой число кластеров варьируется на основе модели ошибок. 5 н. и 35 з.п. ф-лы, 6 ил.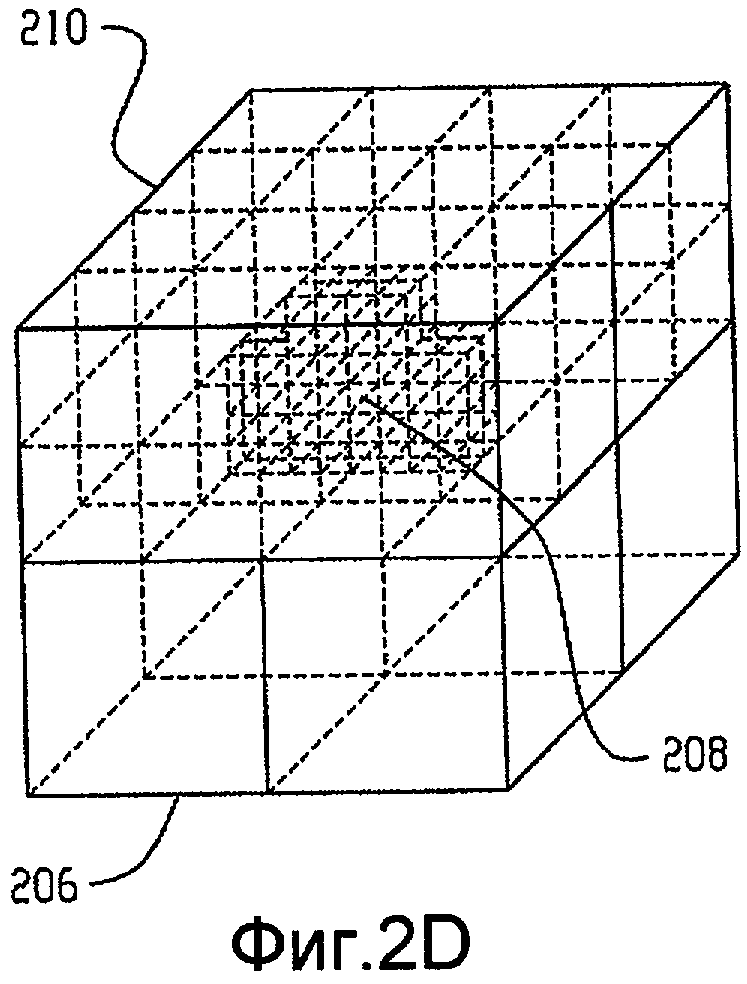
1. Способ функциональной медицинской визуализации, содержащий этапы, на которых:
принимают данные функциональных изображений, указывающие интересующую область объекта, причем данные функциональных изображений включают в себя значение (f) пространственно варьирующегося функционального параметра и модель (е) пространственно варьирующихся функциональных ошибок;
секционируют интересующую область в зависимости от модели пространственно варьирующихся ошибок;
формируют изображение, указывающее секционированную интересующую область.
2. Способ по п.1, в котором секционирование включает в себя этап, на котором секционируют интересующую область на подобласти, имеющие различающиеся пространственные разрешения (206, 208, 210).
3. Способ по п.2, в котором секционирование включает в себя этап, на котором секционируют интересующую область согласно критерию однородности модели функциональных ошибок.
4. Способ по п.2, в котором секционирование включает в себя этап, на котором секционируют интересующую область согласно критерию минимизации модели функциональных ошибок.
5. Способ по п.1, в котором секционирование включает в себя этап, на котором секционируют интересующую область на множество кластеров (304, 306, 308), имеющих похожие значения функциональных параметров, при этом число кластеров является функцией от модели ошибок и статистической ошибки.
6. Способ по п.1, в котором секционирование включает в себя этапы, на которых:
секционируют интересующую область на первое число кластеров (304, 306, 308);
используют модель ошибок для того, чтобы оценить разделение кластеров;
секционируют интересующую область на второе число кластеров.
7. Способ по п.6, в котором использование модели ошибок включает в себя этап, на котором используют модель ошибок и статистическую ошибку для того, чтобы оценить разделение кластеров.
8. Способ по п.7, в котором секционирование интересующей области на второе число кластеров включает в себя этап, на котором выполняют, по меньшей мере, одно из разделения кластера и объединения первого и второго кластера.
9. Способ по п.6, включающий в себя этапы, на которых:
отображают предлагаемое секционирование в воспринимаемой человеком форме;
предоставляют возможность пользователю отклонить предлагаемое секционирование.
10. Способ по п.9, включающий в себя этап, на котором выделяют предлагаемое секционирование с помощью GUI.
11. Способ по п.1, в котором функциональный параметр указывает гипоксию.
12. Способ по п.1, в котором способ включает в себя этап, на котором используют секционированную интересующую область для того, чтобы вычислить распределение дозы облучения.
13. Способ по п.1, в котором функциональный параметр указывает перфузию.
14. Способ по п.1, в котором изображение указывает молекулярный агент визуализации.
15. Способ по п.1, в котором функциональный параметр указывает потребление глюкозы, разрастание клеток, апоптоз или плотность рецепторов.
16. Устройство для функциональной медицинской визуализации, содержащее:
средство для приема данных функциональных изображений, указывающих интересующую область объекта, причем данные функциональных изображений включают в себя значение (f) пространственно варьирующегося функционального параметра и модель (е) пространственно варьирующихся функциональных ошибок;
средство секционирования интересующей области в зависимости от значения пространственно варьирующихся ошибок;
средство формирования изображения, указывающего секционированную интересующую область.
17. Устройство по п.16, включающее в себя средство формирования данных функциональных изображений.
18. Устройство по п.16, в котором средство секционирования включает в себя средство GUI для интерактивного секционирования интересующей области в зависимости от модели пространственно варьирующихся ошибок и ввода человека.
19. Машиночитаемый носитель записи для функциональной медицинской визуализации, содержащий инструкции, которые, когда приводятся в исполнение посредством компьютера, инструктируют компьютер осуществлять способ, содержащий этапы, на которых:
принимают данные функциональных изображений, указывающие интересующую область объекта, причем данные функциональных изображений включают в себя функциональные значения (f) и модель ошибок;
кластеризуют данные функциональных изображений на множество кластеров, при этом число кластеров зависит от модели функциональных ошибок функциональных значений, включенных в кластер.
20. Машиночитаемый носитель записи по п.19, в котором число кластеров зависит от статистической ошибки (s).
21. Машиночитаемый носитель записи по п.19, в котором число кластеров зависит от модели функциональных ошибок (е).
22. Машиночитаемый носитель записи по п.19, в котором способ включает в себя этапы, на которых:
кластеризуют функциональные данные на первое число кластеров;
используют модель ошибок для того, чтобы оценить кластеры;
корректируют число кластеров согласно результату оценки;
кластеризуют функциональные данные на второе число кластеров.
23. Машиночитаемый носитель записи по п.22, в котором кластер включает в себя статистическую ошибку и модель функциональных ошибок и в котором способ включает в себя этапы, на которых:
сравнивают показатель статистической ошибки и показатель модели функциональных ошибок;
если показатель распределения параметров превышает показатель физиологического распределения ошибок, увеличивают число кластеров.
24. Машиночитаемый носитель записи по п.23, в котором способ включает в себя этап, на котором разделяют кластер.
25. Машиночитаемый носитель записи по п.23, в котором показатель статистической ошибки представляет собой квадратическое отклонение.
26. Машиночитаемый носитель записи по п.19, в котором первый кластер включает в себя значение параметра, а второй кластер включает в себя распределение ошибок, и в котором способ включает в себя этапы, на которых:
определяют то, находится ли значение параметра в пределах распределения ошибок;
если значение параметра находится в пределах распределения ошибок, то уменьшают число кластеров.
27. Машиночитаемый носитель записи по п.26, в котором способ включает в себя этап, на котором объединяют первый и второй кластеры.
28. Машиночитаемый носитель записи по п.19, в котором способ включает в себя этапы, на которых:
отображают предлагаемую кластеризацию данных в воспринимаемой человеком форме;
предоставляют возможность пользователю одобрить или отклонить предлагаемую кластеризацию.
29. Машиночитаемый носитель записи по п.19, в котором способ включает в себя этап, на котором используют кластеризованные данные для того, чтобы вычислить дозу облучения.
30. Машиночитаемый носитель записи по п.19, в котором интересующей областью является мозг, а кластеры указывают функцию мозга.
31. Машиночитаемый носитель записи для функциональной медицинской визуализации, содержащий инструкции, которые, когда приводятся в исполнение посредством компьютера, инструктируют компьютер осуществлять способ, содержащий этапы, на которых:
принимают данные функциональных изображений, указывающие интересующую область объекта, причем данные функциональных изображений включают в себя значение (f) пространственно варьирующегося функционального параметра и модель (е) пространственно варьирующихся функциональных ошибок;
используют модель пространственно варьирующихся функциональных ошибок для того, чтобы пространственно варьировать пространственное разрешение данных функциональных изображений;
формируют изображение, указывающее данные функциональных изображений.
32. Машиночитаемый носитель записи по п.31, в котором способ включает в себя этап, на котором варьируют пространственное разрешение согласно одному из критерия однородности модели функциональных ошибок и критерия минимизации модели функциональных ошибок.
33. Машиночитаемый носитель записи по п.31, в котором интересующая область включает в себя миокард, а функциональный параметр указывает ишемию.
34. Машиночитаемый носитель записи по п.31, в котором изображение включает в себя, по меньшей мере, две подобласти с различными пространственными разрешениями на основе модели функциональных ошибок.
35. Способ функциональной медицинской визуализации, содержащий этапы, на которых:
принимают данные функциональных изображений, указывающие интересующую область объекта, причем данные функциональных изображений включают в себя значение (f) функционального параметра и модель (е) функциональных ошибок;
отображают данные функциональных изображений в воспринимаемой человеком форме в GUI;
интерактивно секционируют интересующую область на основе модели функциональных ошибок и оценки человеком отображаемых данных функциональных изображений.
36. Способ по п.35, включающий в себя этап, на котором повторяют этапы отображения и интерактивного секционирования интересующей области множество раз.
37. Способ по п.35, включающий в себя этап, на котором принимают ввод человека, одобряющий предлагаемое секционирование интересующего объема.
38. Способ по п.35, включающий в себя этап, на котором принимают ввод человека, предлагающий секционирование интересующего объема.
39. Способ по п.35, в котором интерактивное секционирование интересующего объема включает в себя этап, на котором интерактивно секционируют интересующий объем на множество подобластей, при этом число подобластей основано на модели функциональных ошибок и оценке человеком.
40. Способ по п.35, в котором функциональный параметр указывает гипоксию или перфузию.
| WO 2004068401 А2, 12.08.2004 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Картонная стелька для рантовой обуви | 1935 |
|
SU46164A1 |

