Заявляемое изобретение относится к области автоматического управления самолетом, в частности к системам управления, обеспечивающим автоматический режим захода на посадку.
Известны системы автоматического управления самолетом при заходе на посадку. Подобные системы описаны, в частности, в авторских свидетельствах SU 762327, В64С 13/18, 10.10.2005; SU 1012524, В64С 13/18, 27.09.2005, патенте RU 2330792, В64С 13/16, 10.08.2008 и в книге Федорова С.М., Кейна В.М., Михайлова О.И., Сухих Н.Н. Автоматизированное управление полетом воздушных судов. - М.: Транспорт, 1992, с.107-108.
К недостаткам известных систем автоматического управления, обеспечивающих автоматический режим захода маневренных самолетов (таких, как Т-35) на посадку, следует отнести тот факт, что в них занижены требования по точности захода на посадку ввиду неудовлетворительной помехозащищенности.
Наиболее близкой по технической сущности к заявляемой системе является система автоматического управления заходом на посадку, представленная в патенте RU 2330792.
Данная система содержит глиссадный радиоприемник, датчики угла тангажа и угловой скорости тангажа, последовательно соединенные вычислитель управляющих сигналов радиомаяка и нелинейный фильтр, а также вычислитель канала тангажа, причем выход глиссадного радиоприемника подключен к первому входу вычислителя управляющих сигналов радиомаяка, выход датчика угла тангажа подключен ко вторым входам вычислителя управляющих сигналов радиомаяка и вычислителя канала тангажа, первый вход которого соединен с выходом нелинейного фильтра, третий вход соединен с выходом датчика угловой скорости тангажа, четвертый вход связан с ручкой управления по сигналу автоматической балансировки, а выход подключен к приводу руля высоты.
Недостатком данной системы автоматического управления является то, что она не обеспечивает высокой точности захода маневренного самолета на посадку ввиду того, что используемый в системе нелинейный фильтр только частично уменьшает величину помехи в сигналах глиссадного радиомаяка.
Целью заявленного изобретения является повышение точности захода самолета на посадку путем улучшения помехозащищенности системы автоматического управления.
Поставленная цель достигается за счет того, что в систему автоматического управления самолетом при заходе на посадку, содержащую глиссадный радиоприемник, датчики угла тангажа и угловой скорости тангажа, вычислитель управляющих сигналов радиомаяка и вычислитель канала тангажа, причем выход глиссадного радиоприемника подключен к первому входу вычислителя управляющих сигналов радиомаяка, выход датчика угла тангажа подключен ко вторым входам вычислителя управляющих сигналов радиомаяка и вычислителя канала тангажа, третий вход которого соединен с выходом датчика угловой скорости тангажа, четвертый вход связан с ручкой управления по сигналу автоматической балансировки, а выход подключен к приводу руля высоты, дополнительно введены линейный фильтр, последовательно соединенные дифференцирующее устройство, первое пороговое устройство и первое запоминающее устройство, последовательно соединенные первый блок «чистое запаздывание», первое коммутационное устройство и второе запоминающее устройство, второе, третье и четвертое коммутационные устройства, выходы которых через первый сумматор соединены с первым входом вычислителя канала тангажа, последовательно соединенные пятое коммутационное устройство, интегрирующее устройство, второй сумматор, второе пороговое устройство, логический блок «ИЛИ» и второй блок «чистое запаздывание», последовательно соединенные третий сумматор, первый вход которого соединен с выходом интегрирующего устройства, и третье пороговое устройство, выход которого подключен ко второму входу логического блока «ИЛИ», последовательно соединенные счетчик времени, четвертое пороговое устройство и логический блок «И», второй вход которого соединен с выходом логического блока «ИЛИ», и шестое коммутационное устройство, причем первый вход линейного фильтра соединен с выходом вычислителя управляющих сигналов радиомаяка, второй вход линейного фильтра соединен с выходом шестого коммутационного устройства, управляющий вход которого соединен с выходом логического блока «И», выход линейного фильтра подключен к входам дифференцирующего устройства и первого блока «чистое запаздывание», ко вторым входам второго и третьего сумматоров, к сигнальным входам третьего коммутационного устройства и четвертого коммутационного устройства, к управляющему входу которого подключен выход второго блока «чистое запаздывание», соединенный также со вторыми входами запоминающих устройств, при этом выход первого запоминающего устройства подключен к счетчику времени, к управляющим входам первого, второго, третьего и пятого коммутационных устройств, сигнальный вход пятого коммутационного устройства соединен с задатчиком сигнала, соответствующего максимально возможной скорости изменения сигнала линейного фильтра, а выход второго запоминающего устройства подключен к сигнальным входам второго и шестого коммутационных устройств и к третьим, инвертирующим, входам второго и третьего сумматоров.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема предлагаемой системы автоматического управления самолетом при заходе на посадку.
Данная система содержит глиссадный радиоприемник 1, датчик 2 угла тангажа, датчик 3 угловой скорости тангажа, вычислитель 4 управляющих сигналов радиомаяка, вычислитель 5 канала тангажа, линейный фильтр 6, дифференцирующее устройство 7, первое пороговое устройство 8, первое запоминающее устройство 9, первый блок 10 «чистое запаздывание», первое коммутационное устройство 11, второе запоминающее устройство 12, второе коммутационное устройство 13, третье коммутационное устройство 14, четвертое коммутационное устройство 15, первый сумматор 16, пятое коммутационное устройство 17, интегрирующее устройство 18, второй сумматор 19, второе пороговое устройство 20, логический блок 21 «ИЛИ», второй блок 22 «чистое запаздывание», третий сумматор 23, третье пороговое устройство 24, счетчик 25 времени, четвертое пороговое устройство 26, логический блок 27 «И» и шестое коммутационное устройство 28.
Сигнал εГ c глиссадного радиоприемника 1 поступает на первый вход вычислителя 4 управляющих сигналов радиомаяка, на второй вход которого поступает сигнал с датчика 2 угла тангажа. В данном вычислителе формируется часть алгоритма управления системы при автоматическом заходе на посадку самолета, пропорциональная углам εГ и ϑ и их производным. Однако, в частности, в сигнале, поступающем с глиссадного радиомаяка в глиссадный радиоприемник 1, имеет место существенный уровень помех, влияние которых существенно для обеспечения требуемого качества захода самолета на посадку. Сигналы с выхода датчика 2 угла тангажа и датчика 3 угловой скорости тангажа подают соответственно на второй и третий входы вычислителя 5 канала тангажа, на четвертый вход которого подают сигнал балансировочного положения ручки управления. В данном вычислителе формируется алгоритм автоматического управления, пропорциональный углу тангажа и его производным. Сигнал с выхода вычислителя 4 управляющих сигналов радиомаяка подают в устройство логической фильтрации, а именно на первый вход линейного фильтра 6 (с малой постоянной времени), служащего для безударного переключения логических операций. Сигнал с выхода фильтра 6 подают на последовательно соединенные дифференцирующее устройство 7, пороговое устройство 8 и запоминающее устройство 9. Отметим, что производная изменения управляющего сигнала при нормально (без помех) функционирующей работе принимает определенное максимальное по абсолютной величине значение. Если это значение при наличии помехи превышает максимально допустимое, то на выходе порогового устройства 8 вырабатывается ненулевой сигнал, который фиксируется первым запоминающим устройством 9. Сигнал с выхода линейного фильтра 6 подают также на последовательно соединенные первый блок 10 «чистое запаздывание», в котором формируют (при цифровой реализации) величину сигнала фильтра 6 на предыдущем шаге, первое коммутационное устройство 11, на управляющий вход которого подают сигнал с выхода первого 9 запоминающего устройства, осуществляющего подключение сигнала фильтра 6 на предыдущем шаге ко второму запоминающему устройству 12. Таким образом, на выходе второго запоминающего устройства 12 формируется сигнал фильтра 6 на предыдущем шаге квантования по времени при условии, что производная изменения сигнала на выходе линейного фильтра 6 больше по абсолютной величине предельно допустимого значения.
Также в системе используются второе, третье и четвертое коммутационные устройства 13, 14 и 15. Причем управляющий и сигнальный входы коммутационного устройства 13 соединены с выходами первого 9 и второго 12 запоминающих устройств соответственно. В случае если производная сигнала линейного фильтра 6 больше предельного значения, с выхода второго коммутационного устройства 13 на первый вход сумматора 16 подается управляющий сигнал со второго запоминающего устройства 12, т.е. сигнал фильтра 6 на предыдущем шаге. Сигнальный вход третьего коммутационного устройства 14 соединен с выходом фильтра 6, а управляющий вход - с выходом первого запоминающего устройства 9, и в случае, если производная сигнала линейного фильтра 6 больше предельного значения, происходит отключение выходного сигнала третьего коммутационного устройства 14 от второго входа сумматора 16. При этом на третий вход сумматора 16 подается сигнал фильтра 6 посредством четвертого коммутационного устройства 15, на управляющий вход которого поступает сигнал со второго блока «чистое запаздывание». Как ранее отмечалось, управляющий сигнал на выходе линейного фильтра 6 может изменяться во времени с фиксированной максимальной скоростью, поэтому необходимо сформировать область возможных изменений управляющего сигнала во времени и определить момент, когда он попадает в заданную область, и принять решение о присвоении сигналу соответствующего значения. Для этого был принят следующий алгоритм: если время, в течение которого управляющий сигнал принимает значения в сформированной области, меньше порогового, например 1 сек, то в качестве управляющего сигнала принимается сигнал, величина которого соответствует значению, запомненному вторым запоминающим устройством 12, а если больше порогового - величина управляющего сигнала соответствует текущему значению.
Для реализации ранее изложенного в системе используются последовательно соединенные пятое коммутационное устройство 17, на сигнальный вход которого подают сигнал, соответствующий максимально возможному значению скорости изменения сигнала линейного фильтра 6, а на управляющий вход - сигнал с выхода первого запоминающего устройства 9, осуществляющего замыкание нормально разомкнутого контакта данного коммутационного устройства, интегрирующее устройство 18, второй сумматор 19, второй вход которого соединен с выходом фильтра 6, а третий, инвертирующий, вход соединен с выходом второго запоминающего устройства 12, второе пороговое устройство 20, срабатывающее при условии отрицательного значения сигнала второго сумматора 19, логический блок 21 «ИЛИ» и второй блок 22 «чистое запаздывание». Таким образом, формируется максимально возможное значение сигнала линейного фильтра 6. Для формирования минимально возможного значения используется третий сумматор 23, первый вход которого соединен с выходом интегрирующего устройства 18, второй вход соединен с выходом фильтра 6, а третий, инвертирующий, - с выходом второго запоминающего устройства 12. Также вводится третье пороговое устройство 24, вход которого соединен с выходом третьего сумматора 23, а выход - со вторым входом логического блока 21 «ИЛИ».
Кроме того, используются последовательно соединенные счетчик 25 времени, вход которого соединен с выходом первого запоминающего устройства 9 (отметим, что под воздействием ненулевого сигнала данного устройства осуществляется «запуск» счетчика 25 времени, а при нулевом сигнале - обнуление счетчика времени), четвертое пороговое устройство 26 и логический блок 27 «И», на второй вход которого подают сигнал с логического блока 21 «ИЛИ», фиксирующего нахождение сигнала фильтра 6 в заданной временной области. При совпадении единичных сигналов на выходах блоков 26 и 21 на выходе логического блока 27 «И» формируется сигнал, который подают на управляющий вход шестого коммутационного устройства 28, на сигнальный вход которого поступает сигнал со второго запоминающего устройства 12 и в качестве начальных условий передается на второй вход линейного фильтра 6. Отметим, что при отключении сигнала второго запоминающего устройства 12 сигнал, соответствующий начальным условиям, на фильтр 6 не поступает.
Сигнал с выхода второго блока 22 «чистое запаздывание» подают на вторые входы первого 9 и второго 12 запоминающих устройств, тем самым обнуляют выходные сигналы данных блоков, а также подают его на второй вход четвертого коммутационного устройства 15, подключая сигнал фильтра 6 к третьему входу первого сумматора 16. Управляющий сигнал, логически зафильтрованный, с выхода данного сумматора поступает на первый вход вычислителя 5 тангажа и с его выхода на привод руля высоты, осуществляя автоматическое управление самолетом при заходе на посадку.
Как показали результаты моделирования предлагаемой системы автоматического управления в составе комплексной системы управления КСУ-35 для маневренного самолета Т-35, благодаря использованию сформированного логического фильтра удалось повысить помехозащищенность системы и тем самым повысить точность захода самолета на посадку.
Отметим, что используемый в данной системе логический фильтр является универсальным и в настоящее время проходит летные испытания в системе автоматического управления тормозами на самолете Т-35 фирмы «Сухой».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2010 |
|
RU2449922C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| Устройство управления самолетом при заходе на посадку | 2016 |
|
RU2648537C1 |
| Способ управления самолетом при заходе на посадку | 2016 |
|
RU2647816C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2330792C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1991 |
|
RU1823356C |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
Изобретение относится к области автоматического управления самолетом, в частности к системам управления, обеспечивающим автоматический режим захода на посадку. Система содержит глиссадный радиоприемник (1), датчик (2) угла тангажа, датчик (3) угловой скорости тангажа, вычислитель (4) управляющих сигналов радиомаяка, вычислитель (5) канала тангажа, линейный фильтр (6), дифференцирующее устройство (7), первое пороговое устройство (8), первое запоминающее устройство (9), первый блок (10) «чистое запаздывание», первое коммутационное устройство (11), второе запоминающее устройство (12), второе коммутационное устройство (13), третье коммутационное устройство (14), четвертое коммутационное устройство (15), первый сумматор (16), пятое коммутационное устройство (17), интегрирующее устройство (18), второй сумматор (19), второе пороговое устройство (20), логический блок (21) «ИЛИ», второй блок (22) «чистое запаздывание», третий сумматор (23), третье пороговое устройство (24), счетчик (25) времени, четвертое пороговое устройство (26), логический блок (27) «И» и шестое коммутационное устройство (28). Достигается улучшение помехозащищенности системы и повышение точности захода самолета на посадку. 1 ил.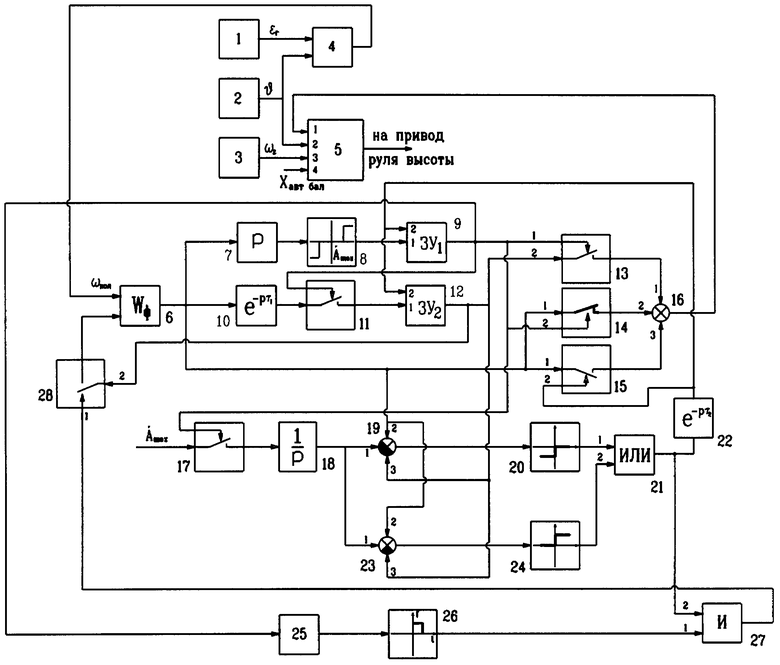
Система автоматического управления самолетом при заходе на посадку, содержащая глиссадный радиоприемник, датчики угла тангажа и угловой скорости тангажа, вычислитель управляющих сигналов радиомаяка и вычислитель канала тангажа, причем выход глиссадного радиоприемника подключен к первому входу вычислителя управляющих сигналов радиомаяка, выход датчика угла тангажа подключен ко вторым входам вычислителя управляющих сигналов радиомаяка и вычислителя канала тангажа, третий вход которого соединен с выходом датчика угловой скорости тангажа, четвертый вход связан с ручкой управления по сигналу автоматической балансировки, а выход подключен к приводу руля высоты, отличающаяся тем, что в нее дополнительно введены линейный фильтр, последовательно соединенные дифференцирующее устройство, первое пороговое устройство и первое запоминающее устройство, последовательно соединенные первый блок «чистое запаздывание», первое коммутационное устройство и второе запоминающее устройство, второе, третье и четвертое коммутационные устройства, выходы которых через первый сумматор соединены с первым входом вычислителя канала тангажа, последовательно соединенные пятое коммутационное устройство, интегрирующее устройство, второй сумматор, второе пороговое устройство, логический блок «ИЛИ» и второй блок «чистое запаздывание», последовательно соединенные третий сумматор, первый вход которого соединен с выходом интегрирующего устройства, и третье пороговое устройство, выход которого подключен ко второму входу логического блока «ИЛИ», последовательно соединенные счетчик времени, четвертое пороговое устройство и логический блок «И», второй вход которого соединен с выходом логического блока «ИЛИ», и шестое коммутационное устройство, причем первый вход линейного фильтра соединен с выходом вычислителя управляющих сигналов радиомаяка, второй вход линейного фильтра соединен с выходом шестого коммутационного устройства, управляющий вход которого соединен с выходом логического блока «И», выход линейного фильтра подключен к входам дифференцирующего устройства и первого блока «чистое запаздывание», ко вторым входам второго и третьего сумматоров, к сигнальным входам третьего коммутационного устройства и четвертого коммутационного устройства, к управляющему входу которого подключен выход второго блока «чистое запаздывание», соединенный также со вторыми входами запоминающих устройств, при этом выход первого запоминающего устройства подключен к счетчику времени, к управляющим входам первого, второго, третьего и пятого коммутационных устройств, сигнальный вход пятого коммутационного устройства соединен с задатчиком сигнала, соответствующего максимально возможной скорости изменения сигнала линейного фильтра, а выход второго запоминающего устройства подключен к сигнальным входам второго и шестого коммутационных устройств и к третьим, инвертирующим, входам второго и третьего сумматоров.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2330792C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 1978 |
|
SU762327A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1981 |
|
SU1012524A1 |
| УСТРОЙСТВО ФАЗОВОЙ АВТОПОДСТРОЙКИ ГЕНЕРАТОРА ИМПУЛЬСОВ | 2004 |
|
RU2259630C1 |
| Источник сейсмических сигналов | 1983 |
|
SU1141357A1 |
| GB 1488744 A, 12.10.1977. | |||

