Изобретение относится к области авиационной техники, а именно к системе управления самолетом в продольной плоскости при заходе на посадку и посадке.
Известно устройство управления посадкой летательных аппаратов (Патент РФ 2284058, G08G 5/02, опубл. 20.09.2006 г.), включающее в себя наземный глиссадный радиомаяк и связанные с ним через радиоканал бортовой глиссадный радиоприемник и дальномер.
Недостатком данной системы является управление летательным аппаратом только при движении по глиссаде и невозможность выполнения режима выравнивания с требуемыми показателями вертикальных скоростей и перегрузок.
Наиболее близким к предлагаемому устройству является устройство управления самолетом при заходе на посадку на этапе выравнивания, состоящее из вычислителя выравнивания на основании данных по высоте и вертикальному ускорению (Белогородский С.Л. Автоматизация управления посадкой самолета. М.: Транспорт, 1972, с. 196).
Недостатком данного устройства управления является ограничение по высоте работы высотомера, приводящее к уменьшению достоверности измеряемых параметров по мере приближения к поверхности взлетно-посадочной полосы на этапе выравнивания (рост шумов в измеряемом сигнале по отношению к полезной составляющей), что уменьшает надежность системы управления самолетом при заходе на посадку на этапе выравнивания и может приводить к посадке с нерасчетными значениями вертикальной скорости, вплоть до конструктивной деформации при касании взлетно-посадочной полосы.
Задачей, на решение которой направлено изобретение, является повышение качества и надежности управления самолетом при заходе на посадку на этапе выравнивания.
Поставленная задача решается тем, что устройство управления самолетом при заходе на посадку на этапе выравнивания, состоящее из вычислителя выравнивания на основании данных по высоте и вертикальному ускорению, дополнительно содержит блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера.
Технический результат предложенного устройства управления самолетом при заходе на посадку на этапе выравнивания, позволяющий обеспечить повышение качества и надежности системы управления самолетом при заходе на посадку, достигается посредством выравнивания самолета до момента касания взлетно-посадочной полосы за счет замены недостоверного информационного сигнала на высотах ниже минимальной гарантированной высоты работы радиовысотомера.
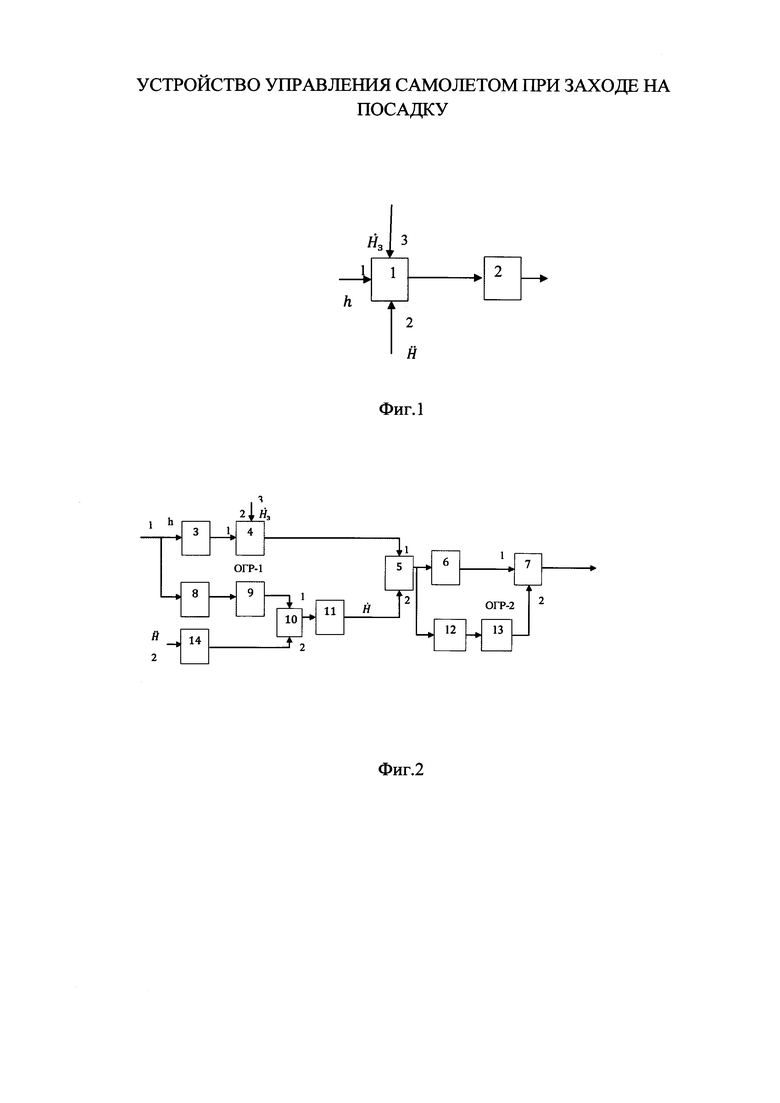
Сущность устройства по изобретению поясняется на фиг. 1, фиг. 2.
Фиг. 1 - структурная схема системы управления самолетом при заходе на посадку на этапе выравнивания;
Фиг. 2 - структурная схема вычислителя выравнивания.
Система управления самолетом при заходе на посадку на этапе выравнивания содержит:
1 - вычислитель выравнивания;
2 - блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера.
Вычислитель выравнивания содержит:
3 -первый усилитель
4 - первый сумматор;
5 - второй сумматор;
6 - второй усилитель;
7 - третий сумматор;
8 - дифференцирующее звено;
9 - первый ограничитель;
10 - четвертый сумматор;
11 - фильтр;
12 - интегратор;
13 - второй ограничитель;
14 - третий усилитель.
Для пояснения осуществления предлагаемого способа приняты следующие обозначения:
h - текущее значение высоты от радиовысотомера;
 - заданное значение вертикальной скорости;
- заданное значение вертикальной скорости;
 - текущее значение ускорения по нормальной оси;
- текущее значение ускорения по нормальной оси;
 - заданное значение угла тангажа.
- заданное значение угла тангажа.
Система управления самолетом при заходе на посадку на этапе выравнивания содержит блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера 2, выход которого является выходом системы управления самолетом при заходе на посадку на этапе выравнивания, а вход соединен с вычислителем выравнивания 1, состоящего из усилителя 3, на вход которого, являющийся первым входом вычислителя выравнивания, поступает сигнал о текущем значении высоты от радиовысотомера h, выход которого через сумматор 4 соединен с первым входом первого сумматора, на второй вход которого, являющийся третьим входом вычислителя выравнивания, подается сигнал заданного значения вертикальной скорости  , дифференцирующее звено 8, вход которого соединен со входом первого усилителя 3, а выход через первый ограничитель 9 соединен с первым входом четвертого сумматора 10, на второй вход которого через третий усилитель 14, вход которого является вторым входом вычислителя выравнивания, подается сигнал текущего значения ускорения по нормальной оси
, дифференцирующее звено 8, вход которого соединен со входом первого усилителя 3, а выход через первый ограничитель 9 соединен с первым входом четвертого сумматора 10, на второй вход которого через третий усилитель 14, вход которого является вторым входом вычислителя выравнивания, подается сигнал текущего значения ускорения по нормальной оси  , выход четвертого сумматора 10 через фильтр 11 соединен со вторым входом второго сумматора 5, первый вход которого соединен с выходом первого сумматора 4, а выход через второй усилитель 6 соединен с первым входом третьего сумматора 7, второй вход которого через второй ограничитель 13 и интегратор 12 соединен с выходом второго сумматора 5, выход третьего сумматора 7 является выходом вычислителя выравнивания.
, выход четвертого сумматора 10 через фильтр 11 соединен со вторым входом второго сумматора 5, первый вход которого соединен с выходом первого сумматора 4, а выход через второй усилитель 6 соединен с первым входом третьего сумматора 7, второй вход которого через второй ограничитель 13 и интегратор 12 соединен с выходом второго сумматора 5, выход третьего сумматора 7 является выходом вычислителя выравнивания.
Работа системы управления самолетом при заходе на посадку на этапе выравнивания происходит следующим образом. Сигнал текущей высоты h от радиовысотомера с порцией 1/Т, заданной в первом усилителе 3, суммируется на первом сумматоре 4 с постоянным сигналом заданного значения желаемой вертикальной скорости приземления, подаваемым на второй вход первого сумматора 4. Сигналы радиовысотомера дифференцируются в дифференцирующем звене 8, ограничиваются в первом ограничителе 9, а затем подаются на фильтр 11 через первый вход четвертого сумматора 10, на второй вход которого подается сигнал текущего значения ускорения по нормальной оси, прошедший через третий усилитель 14. Сформированный на выходе четвертого сумматора 10 сигнал пропускается через изодромное звено в виде фильтра 11 и поступает на второй (инвертирующий) вход второго сумматора 5, на первый вход которого поступает сформированный сигнал с выхода первого сумматора 4. Разностный сигнал с выхода второго сумматора 5 поступает в две цепи. В первой из них сигнал с выхода второго сумматора 5 через второй усилитель 6 поступает на первый вход третьего сумматора 7. Другая цепь, содержащая интегратор 12 и второй ограничитель 13, обеспечивает астатизм управления по регулируемой координате. Ограничитель 13 предотвращает выдачу больших сигналов в систему управления. С выхода второго ограничителя 13 сигнал поступает на второй вход третьего сумматора 7. В результате суммирования двух сигналов, поступающих на первый и второй входы третьего сумматора, получается сигнал заданного угла тангажа. С выхода третьего сумматора 7 сформированный сигнал заданного угла тангажа поступает на блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера 2, на выходе которого формируется сигнал вида:
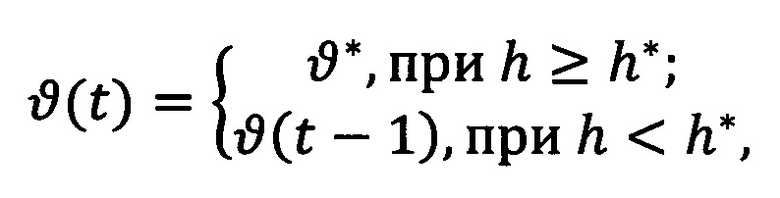
где  - значение сигнала на выходе вычислителя выравнивания 6 в текущий момент времени;
- значение сигнала на выходе вычислителя выравнивания 6 в текущий момент времени;
 - значение сигнала на выходе вычислителя выравнивания 6 в предыдущий момент времени;
- значение сигнала на выходе вычислителя выравнивания 6 в предыдущий момент времени;
 - сигнал на входе запоминающего устройства 6;
- сигнал на входе запоминающего устройства 6;
h - текущее значение высоты с радиовысотомера;
h* - минимальная гарантированная высота работы радиовысотомера.
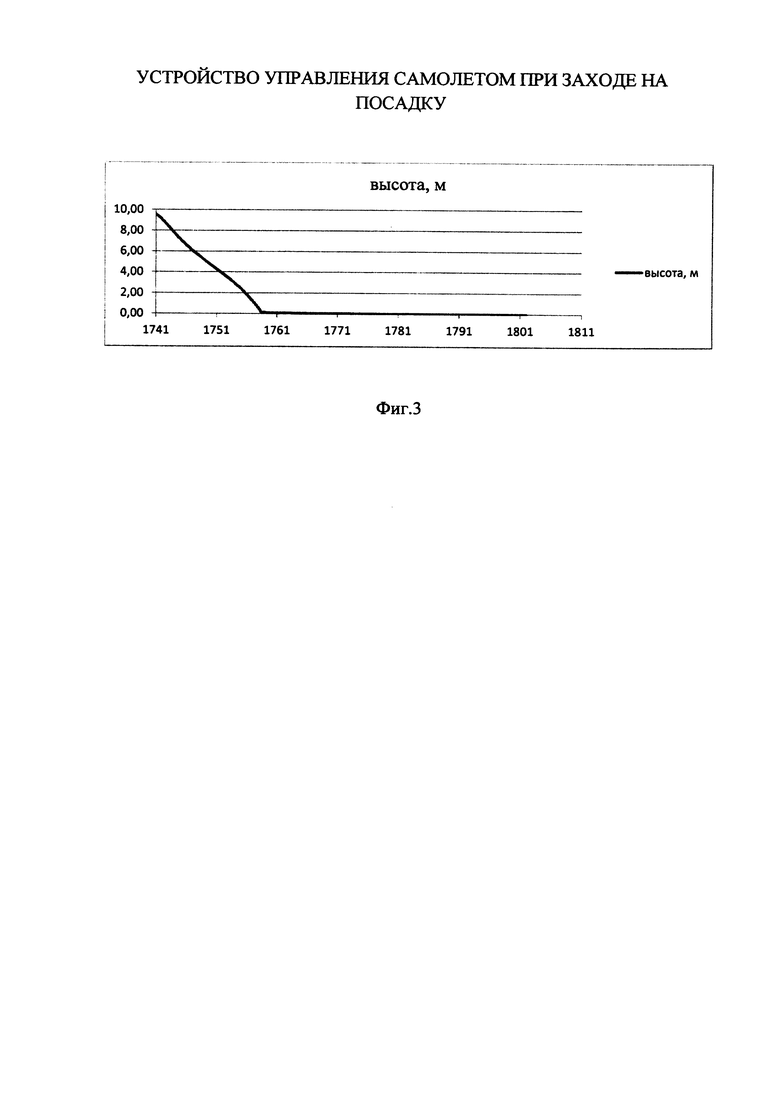
Эффективность применения устройства управления самолетом при заходе на посадку на этапе выравнивания подтверждается фиг. 3, на которой показан график переходного процесса по высоте. Из графика на фиг. 3 следует, что предложенное устройство управления самолетом при заходе на посадку на этапе выравнивания позволяет обеспечить повышение качества и надежности системы управления самолетом при заходе на посадку посредством выравнивания самолета до момента касания взлетно-посадочной полосы.
Предлагаемое устройство управления обеспечивает повышение качества и надежности системы управления самолетом при заходе на посадку на этапе выравнивания за счет замены недостоверного информационного сигнала на высотах ниже минимальной гарантированной высоты работы радиовысотомера корректными данными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления самолетом при заходе на посадку | 2016 |
|
RU2647816C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
Устройство управления самолетом при заходе на посадку на этапе выравнивания содержит вычислитель выравнивания на основании данных о высоте и вертикальном ускорении, блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера. Обеспечивается повышение качества и надежности системы управления самолетом при заходе на посадку. 3 ил.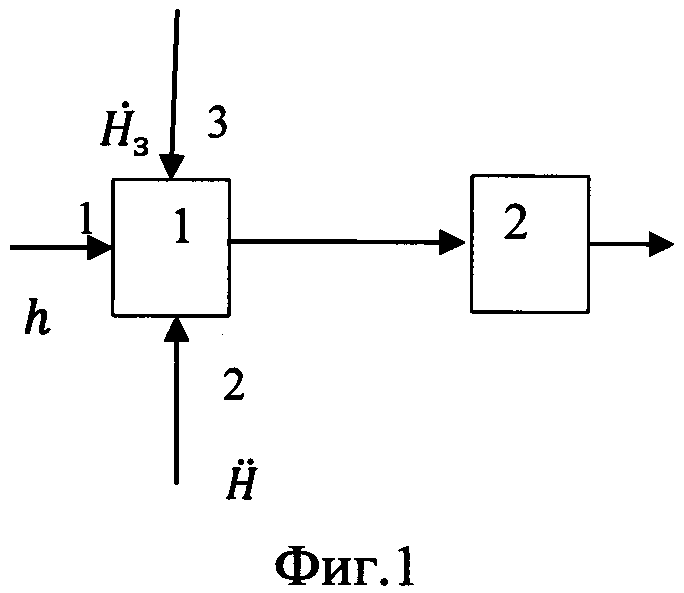
Устройство управления самолетом при заходе на посадку на этапе выравнивания, состоящее из вычислителя выравнивания на основании данных по высоте и вертикальному ускорению, отличающееся тем, что оно дополнительно содержит блок запоминания и стабилизации заданного значения угла тангажа на минимальной гарантированной высоте работы радиовысотомера.
| 0 |
|
SU161470A1 | |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| US 6158695 A1, 12.12.2000. | |||

