Предлагаемое изобретение относится к способам измерения ускорения в условиях воздействия вибрации акселерометрами с чувствительным элементом типа физический маятник с электрической пружиной.
Основной составляющей погрешности в измерении ускорения акселерометрами указанного типа в условиях воздействия вибрации является погрешность при вибрации, направленной под углом к оси чувствительности чувствительного элемента (ЧЭ). Эта погрешность обусловлена детектированием механических колебаний маятника ЧЭ и определяется, при прочих равных условиях, амплитудой его угловых колебаний.
Известен способ повышения точности систем автоматического управления, основанный на введении в основной канал компенсирующего сигнала с дополнительного канала измерения задающего воздействия и называемый комбинированным управлением. Этот способ применим для повышения точности работы акселерометров. При этом существует принципиальная возможность получения инвариантности угла перемещения маятника ЧЭ при воздействии вибрации и тем самым исключить основную составляющую вибрационной погрешности. Однако вследствие технологических, температурных и временных разбросов параметров звеньев основного и дополнительного каналов, величина необходимой амплитуды компенсирующего сигнала в процессе работы может изменяться в широких пределах. Это приводит к существенному снижению эффективности комбинированной системы и, если учитывать возможные разбросы параметров реальных звеньев основного и дополнительного каналов, недокомпенсация вибрационной погрешности может достигать очень больших величин.
Предлагаемый способ имеет своей целью исключение зависимости условий компенсации вибрационной погрешности от разбросов параметров звеньев основного и дополнительного канала.
Сущность изобретения состоит в том, что в целях уменьшения вибрационной погрешности осуществляют автоматическое изменение амплитуды сигнала дополнительного канала в зависимости от амплитуды сигнала с датчика угла чувствительного элемента основного канала и от соотношения фаз сигнала с датчика угла и сигнала с дополнительного канала, который предварительно сдвигают по фазе при помощи инерционного звена.
Предлагаемый способ предусматривает выполнение следующих операций:
1. Сигнал с дополнительного канала подают в основной канал таким образом, чтобы амплитуда и фаза этого сигнала обеспечивала уменьшение угловой колебательности маятника ЧЭ.
2. Сигнал основного канала, характеризующий величину угловых колебаний маятника ЧЭ, и сигнал с дополнительного канала подают на логическое устройство, которое вырабатывает выходное напряжение, величина и полярность которого зависит от амплитуды сигнала основного канала и соотношения фаз сигналов основного и дополнительного каналов.
3. Выходной сигнал логического устройства подают в дополнительный канал на устройство с изменяющимся в зависимости от величины и полярности этого сигнала коэффициентом усиления.
4. Ввиду того, что фаза колебаний маятника на частотах вибрации выше собственной частоты основного канала ωo меняет свой знак, для распространения эффективности предлагаемого способа на частоты вибрации выше ωo, сигнал с дополнительного канала перед подачей на логическое устройство подвергают преобразованию в инерционном звене с передаточной функцией:

В этом случае выбором  обеспечивают однозначную информацию о необходимом направлении изменения коэффициентов усиления дополнительного канала во всем необходимом частотном диапазоне.
обеспечивают однозначную информацию о необходимом направлении изменения коэффициентов усиления дополнительного канала во всем необходимом частотном диапазоне.
Таким образом, постоянно получая информацию о величине углового перемещения маятника ЧЭ, посредством логического устройства и усилителя с переменным коэффициентом усиления, осуществляют необходимое для требуемой минимизации угловых колебаний маятника автоматическое изменение амплитуды компенсирующего сигнала с дополнительного канала.
Ниже приведен пример схемной реализации предлагаемого способа прецизионного измерения ускорения в условиях воздействия вибрации. На чертеже представлена структурная схема комбинированной системы прецизионного маятникового акселерометра. В качестве основного канала использован маятниковый акселерометр компенсационного типа, состоящий из чувствительного элемента, включающего в себя маятник 1, подвижную систему 2, датчик угла 3 и датчик момента 7 и регулирующего блока, состоящего из усилителя напряжения 4, корректирующего контура 5 и усилителя мощности 6.
В качестве дополнительного канала применен измеритель вибрационных ускорений, состоящий из чувствительного элемента 8 и усилителя с переменным коэффициентом усиления 9.
В качестве логического устройства использован фазовый дискриминатор 10. Выход усилителя напряжения подключают ко входу фазового дискриминатора, а сигнал с выхода дополнительного канала через инерционное звено 11 подают на вход опорного напряжения дискриминатора. Для приведенной структурной схемы передаточная функция дополнительного канала, обеспечивающая выполнение условия исключения вибрационной погрешности, обусловленной колебательностью маятника ЧЭ основного канала, имеет вид:
где Wм(р) - передаточная функция маятника ЧЭ основного канала;
Wум(р) - коэффициент передачи усилителя мощности основного канала;
Wдм(р) - передаточная функция датчика момента ЧЭ основного канала.
Схема работает следующим образом.
Пусть сигнал с дополнительного канала, вследствие изменения параметров звеньев основного или дополнительного каналов, стал меньше (больше) необходимого для требуемой минимизации угловых колебаний маятника ЧЭ основного канала. На выходе усилителя напряжения 4 появляется сигнал, характеризующий параметры угловых колебаний маятника. Этот сигнал поступает на дискриминатор 10, на выходе которого появляется сигнал положительной (отрицательной) полярности, подаваемый на усилитель 9 и увеличивающий (уменьшающий) его коэффициент усиления настолько, что величина сигнала с выхода дополнительного канала возрастает (уменьшается), уменьшая из-за обратной связи через чувствительный элемент основного канала колебательность маятника.
В данной схеме были проведены испытания, при которых на акселерометр воздействовала вибрация, направленная под углом 45° к оси чувствительности ЧЭ, с амплитудой 3 g в диапазоне от 20 гц до 150 гц с одновременной имитацией возможных разбросов параметров звеньев дополнительного и основного каналов. Результаты испытания показали, что погрешность от воздействия вибрации при автоматической подстройке компенсирующего сигнала не превышала 0,05%, в то время как без подачи компенсирующего сигнала - 0,5%, а с компенсирующим сигналом без его автоматической подстройки - 0,2%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА | 1993 |
|
RU2047835C1 |
| Прецизионный компенсационный маятниковый акселерометр | 1970 |
|
SU1839936A1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| Компенсационный маятниковый акселерометр | 1989 |
|
SU1638638A1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ КОМПЕНСАЦИОННЫМ АКСЕЛЕРОМЕТРОМ | 1979 |
|
SU1839854A1 |
| Маятниковый компенсационный акселерометр | 1979 |
|
SU792148A1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| МАЯТНИКОВЫЙ ДАТЧИК УРОВНЯ | 2007 |
|
RU2345325C1 |
Изобретение относится к способам измерения ускорения в условиях воздействия вибрации, способ повышения виброустойчивости маятникового акселерометра путем подачи в цепь его обратной связи сигнала с вибродатчика, причем изменяют амплитуду сигнала с вибродатчика в зависимости от угла отклонения маятника и от сдвига фаз сигнала основного канала и сигнала вибродатчика, предварительно пропущенного через апериодическое звено. Технический результат - повышение точности и расширение рабочего диапазона частот. 1 ил.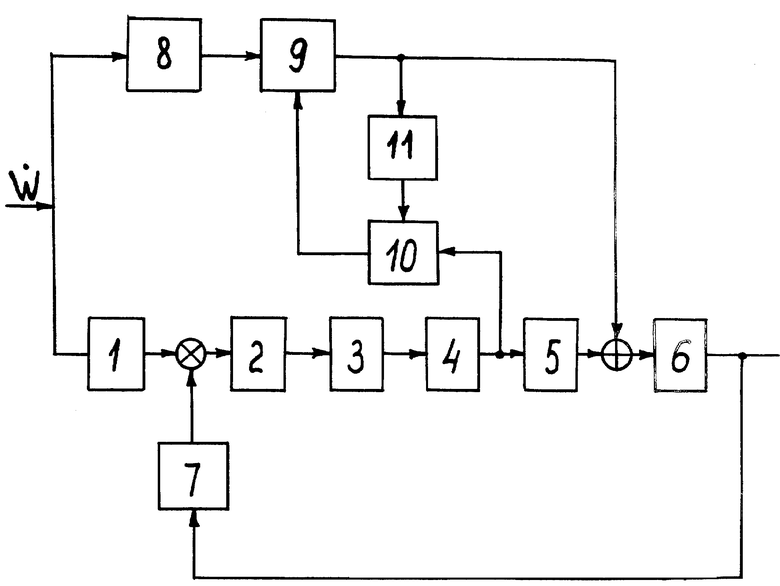
Способ повышения виброустойчивости маятникового акселерометра путем подачи в цепь его обратной связи сигнала с вибродатчика, отличающийся тем, что, с целью повышения точности и расширения рабочего диапазона частот, изменяют амплитуду сигнала с вибродатчика в зависимости от угла отклонения маятника и от сдвига фаз сигнала основного канала и сигнала вибродатчика, предварительно пропущенного через апериодическое звено.

