Изобретение относится к измерительной технике и может применяться для создания микромеханических поворотно-чувствительных устройств с колеблющимися массами, измеряющих скорость вращения с помощью гироскопического эффекта.
Известен вибрационный гироскоп [1], построенный на основе датчика угловой скорости, учитывающий значение кориолисовой силы.
Недостатком такого устройства является влияние перекрестных связей по всем направлениям, т.к. чувствительный элемент выполнен в виде трезубца, элементы которого являются балками и деформируются при отсутствии полезного сигнала под воздействием перекрестных ускорений.
Известен также микромеханический гироскоп [2], который содержит чувствительный элемент, выполненный в виде сосредоточенной массы, подвешенной с помощью двухрамочной системы упругих подвесов, причем подвесы внешней и внутренней рамок расположены под углом 90° друг к другу, силовой электростатический преобразователь, сообщающий внешней рамке угловые колебательные движения относительно подвесов, емкостной преобразователь перемещений, выявляющий движения внутренней рамки под действием кориолисовых сил, возникающих в результате воздействия на внутреннюю рамку двух движений: радиальных перемещений и измеряемой угловой скорости.
Роль гирочувствительного узла выполняет внутренняя рамка, совмещенная с сосредоточенной массой, а роль мотора выполняет внешняя рамка, приводимая в принудительные колебательные движения электростатическим преобразователем силы. Осью чувствительности является линия, проходящая через подвесы внутренней рамки. При наличии угловой скорости колебательные движения от внешней рамки передаются внутренней. Частота колебаний внутренней рамки совпадает с частотой внешней рамки, а амплитуда является пропорциональной величине угловой скорости. Выявление колебаний внутренней рамки осуществляется емкостным преобразователем перемещений. Для получения оптимальной чувствительности резонансную частоту внутренней рамки настраивают на частоту внешней.
Недостатком известного устройства является влияние перекрестных составляющих угловой скорости и ускорений на точность измерений по оси чувствительности.
Наиболее близким по существенным признакам к предлагаемому является микросистемный гироскоп, содержащий чувствительный элемент, выполненный из монокремния в виде проводящей сосредоточенной массы прямоугольной формы, подвешенной с помощью упругих двунаправленных подвесов, выполненных в монтажной пластине, которая соединена с корпусной пластиной с помощью консольной балки, проводящая сосредоточенная масса является одновременно подвижным электродом электростатического силового преобразователя и подвижным электродом емкостного преобразователя перемещений, первая и вторая неподвижные диэлектрические обкладки, тактовый генератор, прямой и инверсный выходы которого соединены с управляющими входами ключевой схемы, источник положительного и отрицательного опорных напряжений, выходы которого соединены со входами ключевой схемы и с суммирующими входами линеаризатора, информационный вход линеаризатора соединен с выходом силового электростатического преобразователя, выходы линеаризатора соединены с первым и вторым электродами электростатического силового преобразователя, масштабный усилитель, выход которого соединен со входом электростатического силового преобразователя и одновременно является выходом микросистемного гироскопа.
Недостатки прототипа - невысокая точность и чувствительность измерений.
Предлагаемым изобретением решается задача повышения точности. Технический результат - повышение чувствительности микросистемного гироскопа в режиме измерения угловой скорости.
Для достижения этого технического результата в микросистемном гироскопе, содержащем чувствительный элемент, выполненный из монокремния в виде проводящей сосредоточенной массы прямоугольной формы, подвешенной с помощью упругих двунаправленных подвесов, выполненных в монтажной пластине, которая соединена с корпусной пластиной с помощью консольной балки, проводящая сосредоточенная масса является одновременно подвижным электродом электростатического силового преобразователя и подвижным электродом емкостного преобразователя перемещений, первая и вторая неподвижные диэлектрические обкладки, тактовый генератор, прямой и инверсный выходы которого соединены с управляющими входами ключевой схемы, источник положительного и отрицательного опорных напряжений, выходы которого соединены со входами ключевой схемы и с суммирующими входами линеаризатора, информационный вход линеаризатора соединен с выходом силового электростатического преобразователя, выходы линеаризатора соединены с первым и вторым электродами электростатического силового преобразователя, масштабный усилитель, выход которого соединен со входом электростатического силового преобразователя и одновременно является выходом микросистемного гироскопа, первая и вторая неподвижные диэлектрические обкладки выполнены одинаковыми, на каждой обкладке выполнены электроды: возбуждения принудительных колебаний проводящей сосредоточенной массы, первый и второй электроды емкостного преобразователя перемещений, первый и второй электроды электростатического силового преобразователя и электроды противошумного устройства, в прямую цепь микросистемного гироскопа введено корректирующее устройство в виде интегрально-дифференциального преобразователя, вход которого соединен с выходом емкостного преобразователя перемещений, а выход соединен со входом масштабного усилителя, в цепь отрицательной обратной связи введено противошумное устройство, состоящее из функционального усилителя, вход которого соединен с выходом микросистемного гироскопа, а выход соединен с противошумным неподвижным электродом на диэлектрической обкладке, с противоположной стороны диэлектрические обкладки металлизированы и заземлены.
Признаками, отличающими предлагаемый микросистемный гироскоп от известного прототипа, являются введение корректирующего устройства, повышающего точность измерений за счет введения астатизма и возможности демпфирования вакуумированного чувствительного элемента в электрическом контуре и снижения уходов с помощью введенного противошумного устройства.
Предлагаемый микромеханический гироскоп иллюстрируется чертежами, представленными на фиг.1-3.
На фиг.1 показан вид в плане чувствительного элемента (ЧЭ) предлагаемого микросистемного гироскопа. ЧЭ содержит чувствительный элемент 1 (корпусная пластина) из монокристаллического проводящего кремния, в который методом анизотропного травления вытравлены все элементы микросистемного гироскопа. Внутри чувствительного элемента 1 выполнена монтажная пластина 2, соединенная с корпусной посредством консольной балки 3. На монтажной пластине 2 посредством сквозного травления 4 выполнена проводящая сосредоточенная масса 5 за одно целое с упругими подвесами 6, дающими сосредоточенной массе 5 степень свободы вдоль оси x, а также упругие подвесы 7, дающие сосредоточенной массе 5 степень свободы вдоль оси z. Упругие подвесы 6 и 7 представляют собой единую упругую балку, состоящую из двух плоских пластин, расположенных друг к другу крестообразно.
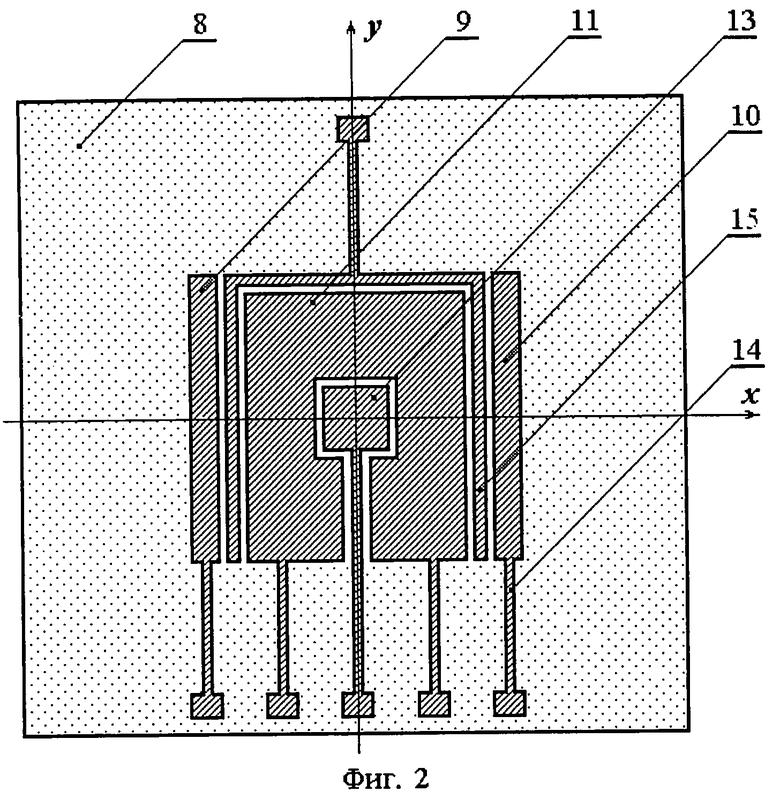
На фиг.2 показана диэлектрическая обкладка 8, выполненная, например, из непроводящего кремния. На диэлектрической обкладке 8 нанесены проводящие электроды 9 и 10, предназначенные для создания принудительных колебаний по оси x сосредоточенной массы 5. Проводящие электроды 11 предназначены для создания силы в составе электростатического преобразователя 12, а проводящие электроды 13 являются обкладками плоского конденсатора емкостного преобразователя перемещений 14. Проводящие электроды 15 в составе противошумного устройства предназначены для вычитания из нулевого сигнала шумовой подставки, подаваемой от функционального усилителя 16.
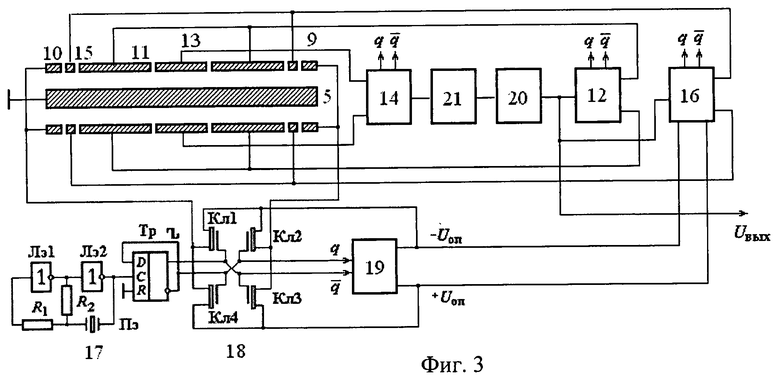
На фиг.3 приведена электрическая структурная схема микросистемного гироскопа. Схема содержит тактовый генератор 17, ключевую схему 18, двухполярный источник 19 опорных напряжений, масштабный усилитель 20.
Тактовый генератор 17 предназначен для переключения опорных напряжений, подаваемых на ключевую схему 18, на электроды 15 для синхронизации силового электростатического преобразователя 12 и для синхронизации емкостного преобразователя перемещений 14.
Ключевая схема 18 предназначена для коммутации положительного и отрицательного опорных напряжений. Прямой q и инверсный  выходы генератора 17 соединены с управляющими входами ключевой схемы 18 и с входами синхронизации емкостного преобразователя перемещений 14, выходы которых соединены со входами ключевой схемы, а выходы ключевой схемы соединены с неподвижными электродами 9 и 10. Все неподвижные проводящие электроды 9, 11, 13 и 15 выполнены по одинаковой топологии на первой и второй диэлектрических обкладках. Диэлектрические обкладки проводящими электродами обращены к чувствительному элементу, а на другой стороне обкладок нанесена металлизация, которая заземлена, что выполняет роль экранизации проводящих электродов. Сосредоточенная масса 5 приводится в колебательное движение по оси x посредством поочередно подключаемых к проводящим электродам 9, 10 ключевой схемой 18 разнополярных источников 19 опорных напряжений. Вход масштабного усилителя 20 соединен с выходом корректирующего устройства 21, с информационным входом которого соединен выход емкостного преобразователя перемещений 14. Сосредоточенная масса является подвижным электродом емкостного датчика перемещения, выполнена из проводящего монокремния и соединена со входом емкостного преобразователя перемещений 14, который одновременно является преобразователем высокого сопротивления емкостного моста в низкое выходное сопротивление операционного усилителя для согласования со следующими узлами электрической схемы.
выходы генератора 17 соединены с управляющими входами ключевой схемы 18 и с входами синхронизации емкостного преобразователя перемещений 14, выходы которых соединены со входами ключевой схемы, а выходы ключевой схемы соединены с неподвижными электродами 9 и 10. Все неподвижные проводящие электроды 9, 11, 13 и 15 выполнены по одинаковой топологии на первой и второй диэлектрических обкладках. Диэлектрические обкладки проводящими электродами обращены к чувствительному элементу, а на другой стороне обкладок нанесена металлизация, которая заземлена, что выполняет роль экранизации проводящих электродов. Сосредоточенная масса 5 приводится в колебательное движение по оси x посредством поочередно подключаемых к проводящим электродам 9, 10 ключевой схемой 18 разнополярных источников 19 опорных напряжений. Вход масштабного усилителя 20 соединен с выходом корректирующего устройства 21, с информационным входом которого соединен выход емкостного преобразователя перемещений 14. Сосредоточенная масса является подвижным электродом емкостного датчика перемещения, выполнена из проводящего монокремния и соединена со входом емкостного преобразователя перемещений 14, который одновременно является преобразователем высокого сопротивления емкостного моста в низкое выходное сопротивление операционного усилителя для согласования со следующими узлами электрической схемы.
Емкости между подвижной сосредоточенной массой 5 и неподвижными проводящими электродами 13 на первой и второй диэлектрических обкладках представляют измерительные емкости C1 и С2, которые при перемещении сосредоточенной массы 5 по оси z изменяются дифференциально, т.е. одна увеличивается, а другая уменьшается на точно такую же величину. При перемещении сосредоточенной массы 5 по оси x - разности между измерительными емкостями С1 и C2 не происходит.
Отрицательная обратная связь имеет две независимые цепочки. Одна из них является основной и предназначена для силовой обработки, вторая - для шумоподавления. В основной цепочке отрицательной обратной связи выход масштабного усилителя 20, являющийся выходом гироскопа, подключен ко входу силового электростатического преобразователя 12. Электростатический силовой преобразователь 12 функционально представляет суммирующий линеаризатор, и соответственно его прямой и инверсный выходы соединены с неподвижными проводящими электродами 11 на первой и второй диэлектрических обкладках. Размеры проводящих электродов 11 и электродов емкостного преобразователя перемещений выполнены меньше размеров в плане сосредоточенной массы 5 на величину максимального значения амплитуды перемещения по оси х. Сделано это с целью исключения чувствительности емкостного преобразователя перемещений в направлении оси х. Цепочка шумоподавления состоит из функционального усилителя 16, прямой и инверсный выходы которого соединены с неподвижными проводящими электродами 15 на первой и второй диэлектрических обкладках.
Для описания работы предлагаемого устройства рассмотрим три возможных режима:
- угловая скорость по оси чувствительности микромеханического гироскопа отсутствует, и действует только помеха в виде линейного ускорения по той же оси;
- по оси чувствительности микромеханического гироскопа действует угловая скорость без помех;
- по оси чувствительности микромеханического гироскопа действует угловая скорость с помехой в виде линейного ускорения по той же оси.
Для всех случаев общим является то, что сосредоточенная масса 5 всегда находится в колебательном движении по оси x, приводимом посредством поочередно подключаемых к проводящим электродам 9 и 10 ключевой схемой 18 разнополярных источников 19 опорных напряжений. Частота принудительных колебаний задается тактовым генератором 17. При этом подвесы 7 (фиг.1) работают на изгиб. Резонансные частоты колебаний сосредоточенной массы 5 по разным осям являются разными. Сделано это с целью исключения захвата колебаний по разным осям, а реализовано посредством соответствующего выбора жесткостей подвесов 6 и 7.
При отсутствии угловой скорости вращения корпуса гироскопа кориолисова сила не возникает, и подвесы 7 не деформируются (фиг.1). Деформация их возможна при действии помехи в виде линейного ускорения по оси z. Однако в результате работы емкостного преобразователя перемещений 14 не модулированные сигналы, например постоянная составляющая линейного ускорения (или случайная составляющая уходов), на выход преобразователя не пропускаются.
При наличии угловой скорости вращения корпуса гироскопа возникает кориолисова сила, которая действует на сосредоточенную массу 5 по оси z. Величина развиваемой кориолисовой силы равна:

где m - сосредоточенная масса 5 (или масса подвижного электрода); V - линейная скорость перемещения сосредоточенной массы 5 по оси x; 'Ω - измеряемая угловая скорость, направленная по оси у. Поскольку линейная скорость по оси x является знакопеременной, то и кориолисова сила также является знакопеременной. При этом сосредоточенная масса 5 начинает колебаться по оси z с той же частотой, что и по оси x, и с амплитудой, прямо пропорциональной величине кориолисовой силы и в конечном итоге прямо пропорциональной измеряемой угловой скорости. При одновременном действии помехи сигнал помехи вычитается с помощью емкостного преобразователя перемещений 14, а на выходе схемы имеет место чистый сигнал, пропорциональный угловой скорости.
Помехи по перекрестным осям в предлагаемом микросистемном гироскопе компенсируются. Например, по оси у они сводятся к бесконечно малым значениям за счет большой жесткости подвесов 6 и 7 на растяжение-сжатие. Кроме того, измерительные емкости C1 и С2 представляют собой два противоположных плеча дифференциального моста, при перемещении сосредоточенной массы по оси у обе емкости изменяются на одинаковую величину. По оси z исключение помех осуществляется конструкцией емкостного преобразователя перемещений, который выполнен так, что является нечувствительным к не модулированным перемещениям по оси z и не приводит к разбалансу моста.
Чувствительность не вакуумированного микросистемного гироскопа может быть оценена по формуле:

где ώ - частота возбуждения принудительных колебаний сосредоточенной массы (m); δ - амплитуда принудительных колебаний; G=4E[100]c3 пbп/a3 п - жесткость четырех растяжек подвеса; ап, bп cп - размеры растяжки подвеса; E[100] - модуль упругости кремния для [100]-го кристаллографического направления. Основным назначением введенного корректирующего устройства является придание возможности осуществить демпфирование сосредоточенной массы в электрическом контуре гироскопа. Это снимает необходимость применения газодинамического демпфирования подвижной сосредоточенной массы. При этом внутренний объем гироскопа вакуумирован, а добротность контура принудительных колебаний увеличивается на величину снижения потерь на трение газа о поверхность подвижной сосредоточенной массы:

где η - безразмерный коэффициент потерь, зависит от трения газа о твердую поверхность. Чувствительность предложенного вакуумированного микросистемного гироскопа определяется по формуле:

Из (4) видно, что чувствительность предложенного вакуумированного микросистемного гироскопа увеличена, а это напрямую приводит к улучшению точности.
Кроме того, к повышению чувствительности и соответственно к повышению точности приводит снижение шумов в выходном сигнале гироскопа. С этой целью введена цепочка шумоподавления, которая состоит из настроенного функционального усилителя 16. Вход функционального усилителя 16 подключен к выходу масштабного усилителя 20, а прямой и инверсный выходы функционального усилителя 16 соединены с неподвижными проводящими электродами 15 на первой и второй диэлектрических обкладках.
Все отмеченное выше в описании доказывает, что технический результат изобретения достигнут.
Источники информации
1. Sugawara Sumio, Tomikawa Yoshiro "Nihon onkyo gakkaishi", том 55, вып.7, 1999 г. с.496-503.
2. Северов Л.А. и др. «Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития». Известия ВУЗов. Приборостроение. 1998. Т.41. №1-2, стр.57-73.
3. Патент РФ №2209394, G01С 19/56, опубл. 27.07.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО ГИРОСКОПА | 2014 |
|
RU2556334C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| УСИЛИТЕЛЬ ОБРАТНОЙ СВЯЗИ ДЛЯ ИНТЕГРАЛЬНЫХ ДАТЧИКОВ | 2010 |
|
RU2431849C1 |
| ИНЕРЦИАЛЬНЫЙ ЭЛЕМЕНТ | 2014 |
|
RU2573616C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2426134C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
Изобретение относится к измерительной технике. Микросистемный гироскоп содержит чувствительный элемент, выполненный в виде сосредоточенной массы прямоугольной формы, подвешенный с помощью двунаправленных упругих подвесов, силовой электростатический преобразователь, сообщающий сосредоточенной массе колебательные движения, емкостный преобразователь перемещений, выявляющий движения массы под действием кориолисовых сил. Гироскоп содержит также корректирующее устройство и устройство шумоподавления. Изобретение обеспечивает высокую чувствительность к измерению угловой скорости и полную помехозащищенность от перекрестных влияний и может быть реализовано на любой диапазон измерений угловых скоростей. 3 ил.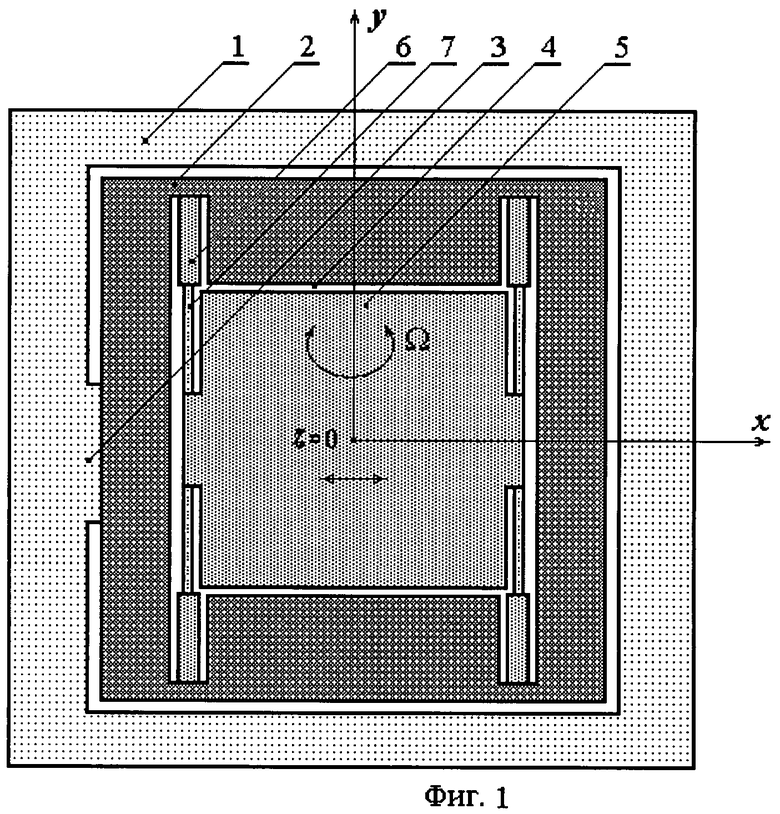
Микросистемный гироскоп, содержащий чувствительный элемент, выполненный из монокремния в виде проводящей сосредоточенной массы прямоугольной формы, подвешенной с помощью упругих двунаправленных подвесок, выполненных в монтажной пластине, которая соединена с корпусной пластиной с помощью консольной балки, проводящая сосредоточенная масса является одновременно подвижным электродом электростатического силового преобразователя и подвижным электродом емкостного преобразователя перемещений, первую и вторую неподвижные диэлектрические обкладки, тактовый генератор, прямой и инверсный выходы которого соединены с управляющими входами ключевой схемы, источник положительного и отрицательного опорных напряжений, выходы которого соединены со входами ключевой схемы и с суммирующими входами линеаризатора, информационный вход линеаризатора соединен с выходом силового электростатического преобразователя, выходы линеаризатора соединены с первым и вторым электродами электростатического силового преобразователя, масштабный усилитель, выход которого соединен со входом электростатического силового преобразователя и одновременно является выходом микросистемного гироскопа, отличающийся тем, что первая и вторая неподвижные диэлектрические обкладки выполнены одинаковыми, на каждой обкладке выполнены электроды возбуждения принудительных колебаний проводящей сосредоточенной массы, первый и второй электроды емкостного преобразователя перемещений, первый и второй электроды электростатического силового преобразователя и электроды противошумного устройства, в прямую цепь микросистемного гироскопа введено корректирующее устройство в виде интегрально-дифференциального преобразователя, вход которого соединен с выходом емкостного преобразователя перемещений, а выход соединен со входом масштабного усилителя, в цепь отрицательной обратной связи введено противошумное устройство, состоящее из функционального усилителя, вход которого соединен с выходом микросистемного гироскопа, а выход соединен с противошумным электродом на диэлектрической обкладке, с противоположной стороны диэлектрические обкладки металлизированы и заземлены.
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| СЕВЕРОВ Л.А | |||
| и др | |||
| Микромеханические гироскопы: конструкции, характеристики, технологии, пути развития | |||
| - Изв | |||
| ВУЗов, Приборостроение, 1998, т.41, №1-2, с.57-73 | |||
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2234679C2 |
| JP 2000161963 A, 16.06.2000 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| JP 2006170914 A, 29.06.2006 | |||
| JP 2004309280 A, 04.11.2004 | |||
| JP 2000321075 A, 24.11.2000. | |||

