Уровень техники
Изобретение - инерционный движитель - относится к приводам для перемещения.
Существует патент «Инерционный центробежный двигатель»
[В.Д. Корнилов, В.В. Корнилов, патент РФ №2034170 от 20.01.1993 г. на изобретение «Инерционный центробежный двигатель», RU 2034170 по заявке №93003420/06].
Существует патент «Инерционный двигатель»
[Белый Д.М., патент РФ №2123133 от 05.06.1996 г. на изобретение «Инерционный двигатель», RU 2123133 по заявке №96111867/06].
Данные изобретения используют принцип разности сил, воздействующих на весь инерционный двигатель, а настоящее изобретение использует принцип разности воздействия сил по времени.
Существует патент «Движитель с использованием ускоряющихся масс»
[Ледин В.М. патент РФ №2467202 от 09.03.2011 г. на изобретение «Движитель с использованием ускоряющихся масс», RU 2467202 по заявке №2011108667/11]. Данное изобретение не использует центробежную силу и не перемещает одновременно массы, состоящие в соприкосновении и находящиеся внутри замкнутой диэлектрической полой трубки.
Раскрытие изобретения
Для движения в среде с большей эффективностью и энергосбережением требуется инерционный движитель. Тем не менее данный инерционный движитель не является независимой системой.
Краткое описание чертежей
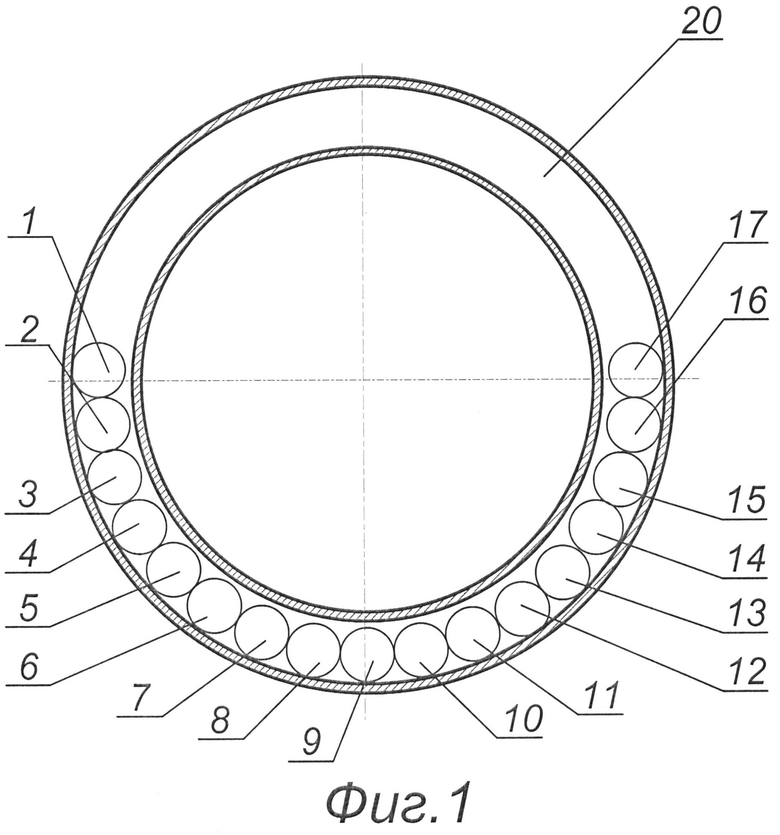
На фиг.1 показана замкнутая диэлектрическая полая трубка 20, внутри которой находятся металлические массы 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17 в неподвижном состоянии.
На фиг.2 показана замкнутая диэлектрическая полая трубка 20, внутри которой двигаются металлические массы 1-17. Металлическая масса 1 двигается отдельно с направлением 21 движения металлической массы. Металлические массы 2-17 двигаются совместно, тесно прижимаясь друг к другу с направлением 30 движения металлических масс.
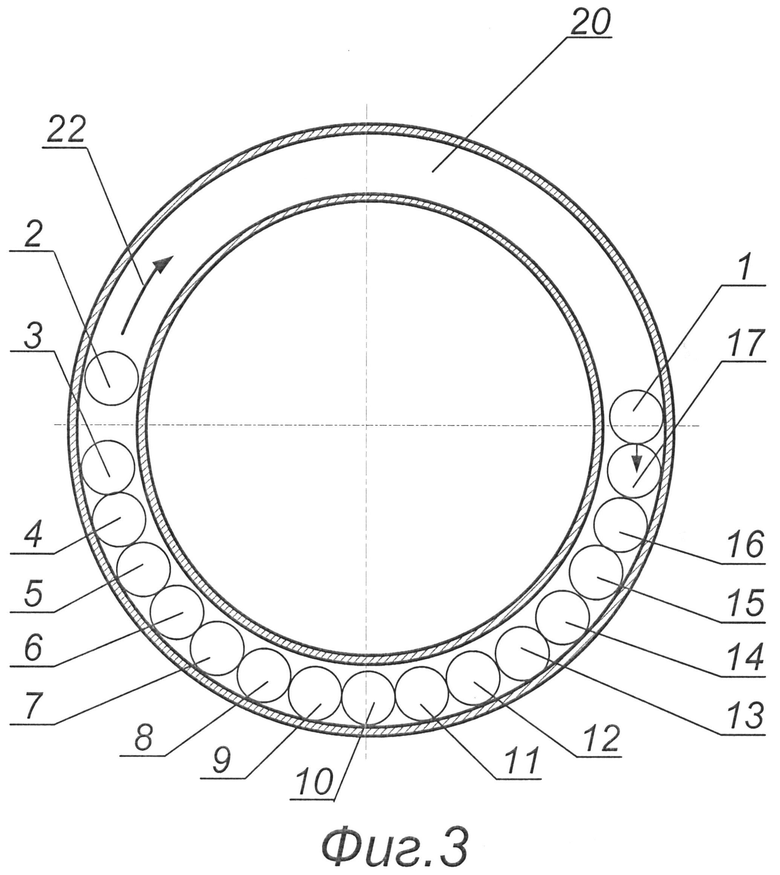
На фиг.3 показана замкнутая диэлектрическая полая трубка 20, внутри которой находятся металлические массы 1-17. Металлическая масса 1, ударившись о металлическую массу 17, создал механическую волну, прошедшую от 17 до 2 металлической массы и двинувшую металлическую массу 2 в направлении 22 движения металлической массы.
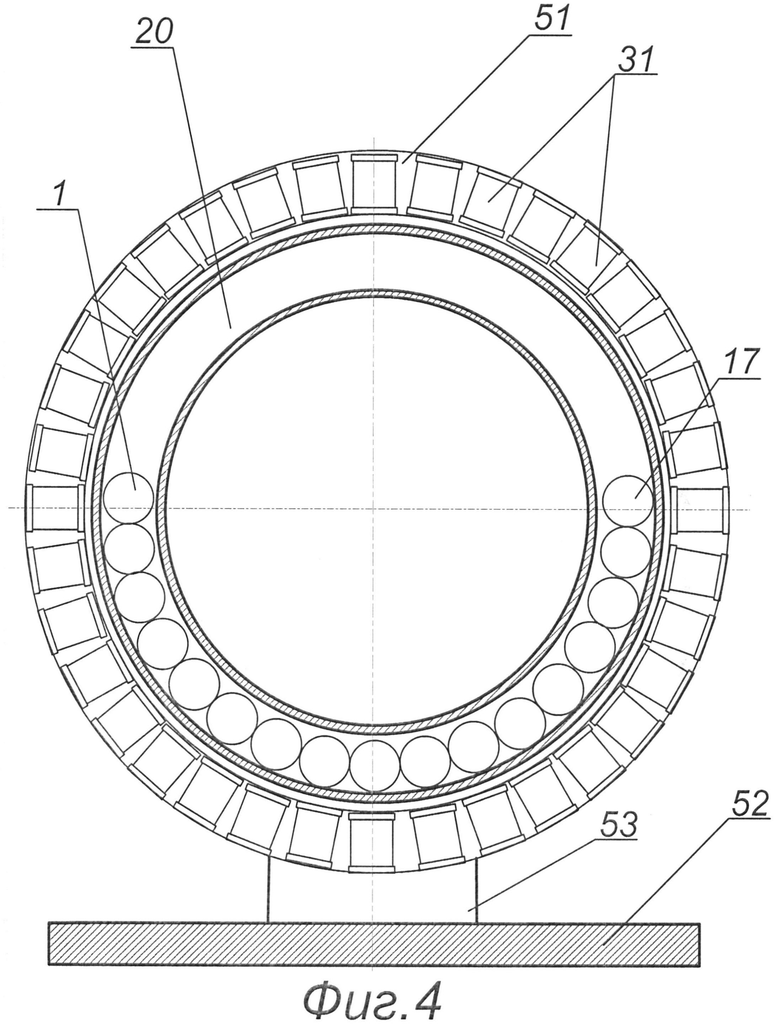
На фиг.4 показана часть инерционного движителя. На основании 52 закреплена стойка 53. Также показана замкнутая диэлектрическая полая трубка 20, с металлическими массами 1-17, вокруг замкнутой диэлектрической полой трубки показано колесо 51 с электромагнитными катушками 31.
На фиг.5 показан инерционный движитель (вид сбоку). Инерционный движитель состоит из основания 52, закрепленных на основании 52 стойки 63 и стойки 53; и замкнутой диэлектрической полой трубки 20, закрепленной с помощью крепежной детали 24. В стойке 63 закреплен электродвигатель 64, на вал которого посажено колесо 61 с электромагнитными катушками 41 и токосъемными щетками 65, также стойка 63 соединена крепежной деталью 23 с диэлектрической полой трубкой 20. В стойке 53 закреплен электродвигатель 54, на вал которого посажено колесо 51 с электромагнитными катушками 31 и токосъемными щетками 55.
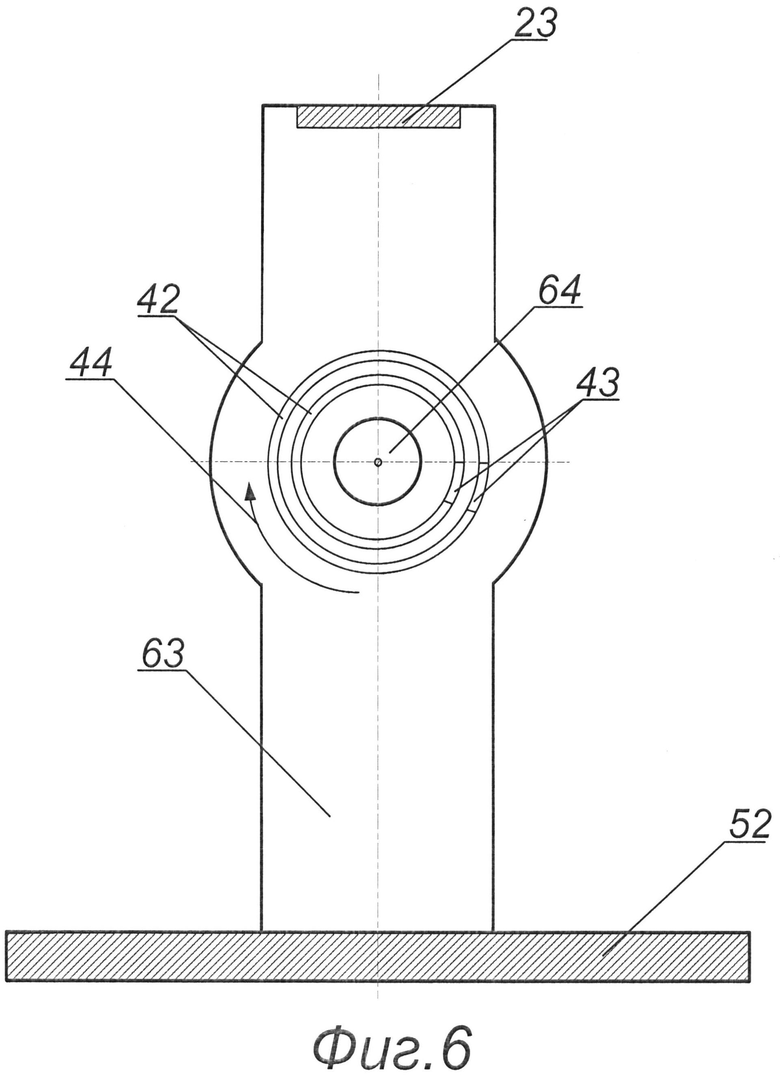
На фиг.6 показана часть инерционного движителя со стойкой 63, которая закреплена на основании 52. На стойке 63 закреплен электродвигатель 64. Также на стойке 63 располагаются латунные шинки 43 удержания металлических масс, шинки 43 продолжаются пластиковыми дорожками 42. Также показан разрез крепежной детали 23. Показано направление 44 движения колеса 61 (см. фиг.5) относительно стойки 63.
На фиг.7 показана часть инерционного движителя со стойкой 53, которая закреплена на основании 52. На стойке 53 закреплен электродвигатель 54. Также на стойке 53 располагаются латунные шинки 33 удержания металлических масс. Шинки 33 отделены от латунных шинок 32 движения металлической массы пластиковыми дорожками 36. Показано направление 34 движения колеса 51 (см. фиг.5) относительно стойки 53.
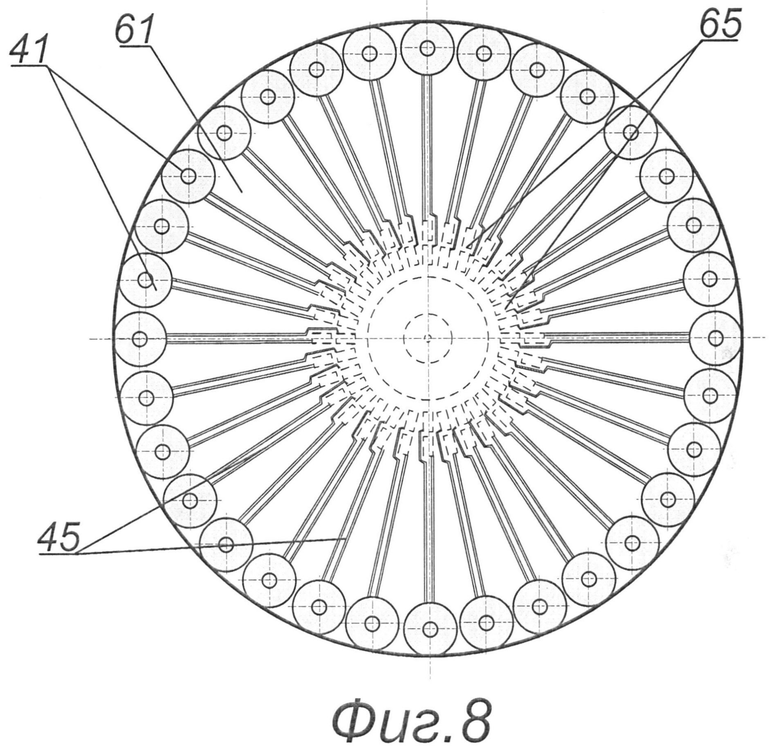
На фиг.8 показано колесо 61. На колесе 61 расположены с одной стороны электромагнитные катушки 41 и шинки 45 питания данных катушек 41, с другой стороны колеса расположены токосъемные щетки 65. Шинки 45 питания достигают токосъемных щеток 65, проходя по специальным прорезям внутри колеса 61.
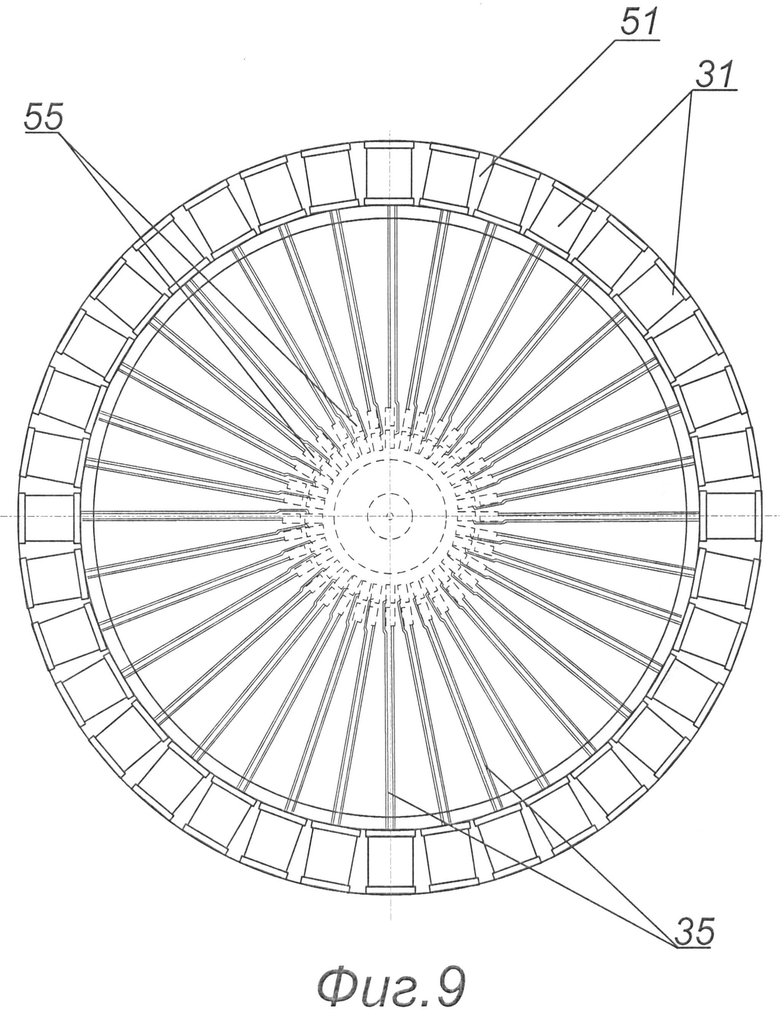
На фиг.9 показано колесо 51. На колесе 51 расположены с одной стороны электромагнитные катушки 31 и шинки 35 питания данных катушек 31, с другой стороны колеса расположены токосъемные щетки 55. Шинки 35 питания достигают токосъемных щеток 55, проходя по специальным прорезям внутри колеса 51.
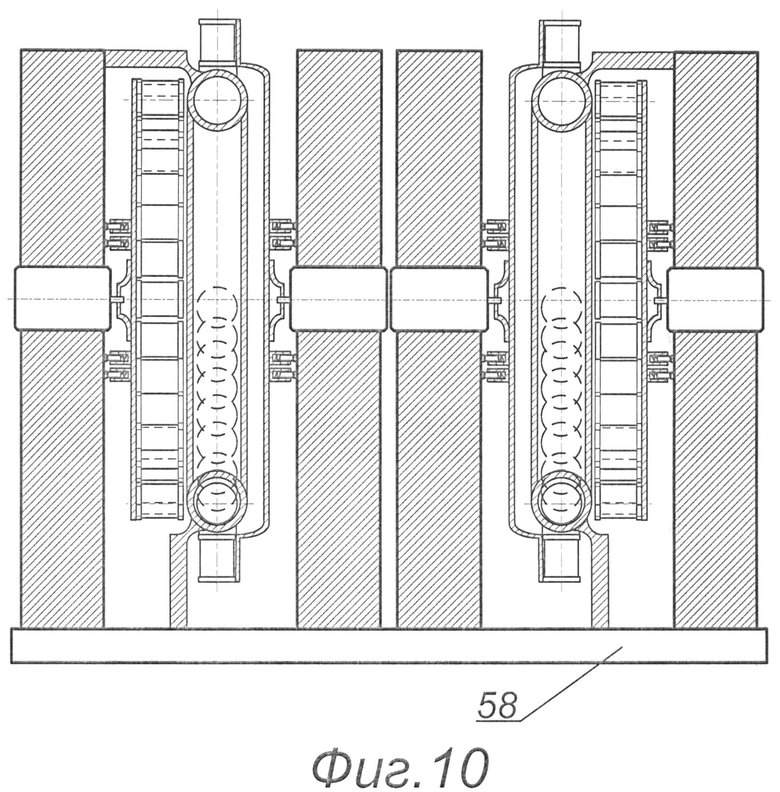
На фиг.10 показано совместное использование двух инерционных движителей, но находящихся на общем основании 58. Для компенсации тангенциальных ускорений и моментов вращения.
Осуществление изобретения
Работа данного инерционного движителя не противоречит законам существующей механики. Известно, что каждое тело обладает силой инерции по отношению к окружающей его системе. Ни одно физическое тело не является полностью закрытой или изолированной системой. Известно, также, что силы действующие внутри вибраторов, также взаимодействуют с внешней средой. Силы эти действуют не одновременно.
1. Инерционный движитель, состоящий из основания 52 (см. фиг.5), жестко закрепленной на основании 52 замкнутой диэлектрической полой трубки 20 с помощью крепежной детали 24, отличается тем, что на основании закреплены две стойки 63, 53; в одной стойке 63 закреплен отдельный электродвигатель 64, на вал которого посажено колесо 61 с электромагнитными катушками 41 и токосъемными щетками 65, также эта стойка 63 соединена крепежной деталью 23 с замкнутой диэлектрической полой трубкой 20; в другой стойке 53 закреплен отдельный электродвигатель 54, на вал которого посажено колесо 51 с электромагнитными катушками 31 и токосъемными щетками 55; на стойках 63, 53 находятся токоведущие шинки (шинки 43, 33 удержания металлических масс, шинки 32 движения металлической массы) (фиг.6, фиг.7), соприкасающиеся со щетками 65, 55 колес 61, 51; замкнутая диэлектрическая полая трубка 20 представляет собой тор, замкнутая диэлектрическая полая трубка 20 содержит внутри себя множество металлических масс 1-17 (фиг.2, фиг.4).
2. Инерционный движитель в п.1 отличается тем, что электромагнитные катушки 41, 31, закрепленные на колесах 61, 51, имеют возможность притягивать металлические массы 1-17, находящиеся в замкнутой диэлектрической полой трубке 20.
3. Инерционный движитель в п.1 отличается тем, что металлические массы 1-17, находящиеся внутри замкнутой диэлектрической полой трубки 20, имеют возможность создавать центробежные силы, различающиеся по времени воздействия на инерционный движитель.
4. Инерционный движитель в п.1 отличается тем, что колеса 61, 51, посаженные на валы электродвигателей, имеют возможность встречно вращаться.
Инерционный движитель работает следующим образом. Колеса 61 и 51, приводимые в движение электродвигателями 64 и 54, соответственно, постоянно вращаются во встречных направлениях со скоростью n=1500 об/мин (см. фиг.5, фиг.6, фиг.7). На шинки 32 движения металлической массы постоянно подается напряжение, достаточное для удержания металлической массы электромагнитной катушкой (см. фиг.7, фиг.9). Шинки 32 расположены в определенном месте дуги окружности. Соответственно, к этому месту все катушки 31, находящиеся на колесе 51, получают напряжение, достаточное для притяжения металлической массы. Напряжение подается изнутри стойки 53 с помощью специальной электрической схемы от аккумуляторов, находящихся внутри стойки 53. Далее с помощью токосъемных щеток 55 и шинок 35 питания, находящихся на колесе 51, напряжение достигает катушек 31 (см. фиг.5, фиг.7, фиг.9). Аналогично происходит подача напряжения на электромагнитные катушки 31 с шинок 33 удержания металлических масс (см. фиг.5, фиг.7, фиг.9).
На шинки 43 удержания шаров постоянно подается напряжение, достаточное для удержания металлических масс электромагнитными катушками (см. фиг.6, фиг.8). Шинки 43 расположены в определенном месте дуги окружности. Соответственно, этому месту все катушки 41, находящиеся на колесе 61, получают напряжение, достаточное для притяжения металлической массы. Напряжение подается изнутри стойки 63 с помощью специальной электрической схемы от аккумуляторов, находящихся внутри стойки 63. Далее с помощью токосъемных щеток 65 и шинок 45 питания, находящихся на колесе 61, напряжение достигает катушек 41 (см. фиг.5, фиг.6, фиг.8). Шинки 33, 43, 32 начинаются ранее положения воздействия на металлическую массу, это связано с тем, что насыщение сердечника катушки происходит не сразу после подачи питания и соответственно катушка начинает работать как электромагнит не сразу после подачи питания на катушку.
Металлическая масса 1 (см. фиг.1, фиг.2) подхватывается катушкой 31 (см. фиг.5, фиг.7, фиг.9). Металлические массы 2-17 стремятся (фиг.2) занять положение (фиг.3), такое, чтобы ось, проходящая через центры металлических масс 2 и 17, стала параллельна наибольшей по площади грани основания 52 (см. фиг.6, фиг.7) инерционного движителя. Металлические массы 2-17 движутся в это положение благодаря электромагнитным катушкам, расположенным на колесах 61, 51 (см. фиг.6, фиг.7), и шинкам 43, 33 удержания металлических масс. А также ввиду того, что колеса 61, 51 движутся навстречу друг другу, металлические массы плотно прижимаются 2-17 друг к другу. Пройдя полуокружность, металлическая масса 1 (фиг.3) ударяется о металлическую массу 17, образуется затухающая механическая волна, пробегающая от металлической массы 17 через металлические массы 16-3 к металлической массе 2. Металлическая масса 2 отрывается от металлической массы 3 и подхватывается электромагнитной катушкой 31, питающейся от шинок 32 удержания металлической массы. Металлические массы 3-17 и 1 стремятся занять положение такое, чтобы ось, проходящая через центры металлических масс 3 и 1, стала параллельна наибольшей по площади грани основания 52. Таким образом, цикл многократно повторяется, пока работают электродвигатели 64, 54. Для снижения сопротивления воздуха внутри диэлектрической полой трубки 20, в стенках трубки находится множество маленьких отверстий, меньших по диаметру, в 20 раз, диаметра металлической массы 1. (Данные отверстия не показаны на фигурах).
На шинках 43, 33 удержания металлических масс напряжение меньше, чем на шинках 32 движения металлической массы, это сделано для того, чтобы металлическая масса легче отрывалась от прижатых друг к другу металлических масс.
Рассмотрим процессы, происходящие во время работы инерционного движителя.
Металлическая масса (в данном случае шар) массой m=0.007 кг, диаметром dш=0.012 ударяется о металлическую массу (шар) с такой же массой, находящийся в соприкосновении с другими шарами.
Радиус трубки 20: R=0.06 м, угловая скорость шара равна n=1500 об/мин, тогда скорость шара будет равна
v=2·π·R·n/60=2·3.14160·0.06·1500/60=9.42 м/с
Сила будет равна
Fш=m·v2/R=0.007·9.4252/0.06=10.36 H
Найдем силу перемещения 16 металлических масс (шаров).
Скорость перемещения одного шара
v1=dш·n/60=0.012·1500/60=0.3 м/с
Найдем силу перемещения 16 шаров (под воздействием встречно вращающихся колес 51, 61 шары должны будут принять равновесное положение внутри трубки, при отрыве одного из шаров от них и присоединении другого):

Таким образом сила, воздействующая на всю конструкцию инерционного движителя, направленная в сторону, противоположную основанию 52, будет равна (см. фиг.2):
Fв=Fш-Fшаров=10.36 H - 0.168 H = 10.192 H
А сила, воздействующая на всю конструкцию инерционного движителя, направленная в сторону основания 52, равна (см. фиг.2):
Fн=Fш+Fшаров=10.36 H + 0.168 H = 10.528 H
При массе всей конструкции инерционного движителя, равной mид=0.4 кг, найдем ускорения всей конструкции в пространстве в ту и другую стороны.
Fвaв·mид, откуда aв=Fв/mид=10.192/0.4=25.48 м/с2;
Fn=aн·mид, откуда aн=Fн/mид=10.528/0.4=26.32 м/с2.
Продолжительность воздействия сил Fв и Fн на конструкцию инерционного движителя неодинакова.
Найдем время, за которое один шар проходит половину трубки, двигаясь один: n=1500 об/мин = 25 об/с = 50 (полуоборотов/с), откуда один полуоборот шар делает за tв=0.02 с.
Теперь найдем время, за которое проходит механическая волна по шарам.
Скорость механической волны vн=5000 м/с.
Т.к. радиус трубки 20:R=0.06 м, тогда длина половины трубки будет равна: l/2=π·R=3.14159·0.06=0.18849 м. Откуда время, за которое механическая волна пробегает половину трубки, 20 будет равно:
tн=(1/2)/vн=5000/0.8849=3.77·10-5 c. Таким образом, время за которое один шар преодолевает половину трубки, будет, примерно, в 530 раз дольше пробегания половины трубки механической волной
(tв/tн=0,02/(3.77·10-5)=530.5039). А значит, и сила Fв действует в 530 раз дольше на инерционный движитель, чем сила Fн. Вследствие чего инерционный движитель будет смещаться в сторону действия силы Fв в 530 раз дольше, чем он смещается в сторону силы Fн, а поскольку ускорения aв и aн отличаются незначительно, то очевидно, что инерционный движитель будет двигаться в сторону силы Fв.
Тангенциальные ускорения, в одном случае, не учитываются поскольку описанный инерционный движитель применяется в удвоенном количестве, как это показано на фиг.10, но с общим основанием 58, когда колеса, передвигающие отдельные металлические массы, движутся во встречных направлениях и колеса, передвигающие соприкасающиеся металлические массы совместно, также движутся во встречных направлениях. (Колеса перемещают металлические массы, как это уже было сказано выше, посредством притяжения электромагнитных катушек, находящихся на колесах). Таким образом, моменты вращения и тангенциальные ускорения взаимно компенсируются.
В другом случае можно учитывать только тангенциальные ускорения инерционного движителя, если установить два инерционных движителя на общее основание так, чтобы компенсировались центробежные ускорения, а тангенциальные ускорения работали.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ВИБРАТОР | 2010 |
|
RU2453380C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2013 |
|
RU2547667C1 |
| Летательный аппарат для транспортирования крупногабаритных грузов | 2019 |
|
RU2714973C1 |
| ТРЕНАЖЕР КОСМОНАВТА | 2012 |
|
RU2490182C1 |
| КОЛЕСО ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА С АЭРОДИНАМИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2495793C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2521862C1 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| Штангоуловитель для токоприемников троллейбусов | 1967 |
|
SU422214A1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| Электродвигатель Андронова II | 2024 |
|
RU2841115C1 |


Изобретение относится к приводам для перемещения. Инерционный движитель состоит из основания, на котором закреплены две стойки. В одной стойке закреплен отдельный электродвигатель, на вал которого посажено колесо с электромагнитными катушками и токосъемными щетками. Стойка соединена крепежной деталью с замкнутой диэлектрической полой трубкой. В другой стойке закреплен отдельный электродвигатель, на вал которого посажено колесо с электромагнитными катушками и токосъемными щетками. На стойках находятся токоведущие шинки, соприкасающиеся со щетками колес. Полая трубка представляет собой тор и содержит внутри себя множество металлических масс. Достигается создание инерционного движителя. 3 з.п. ф-лы, 10 ил.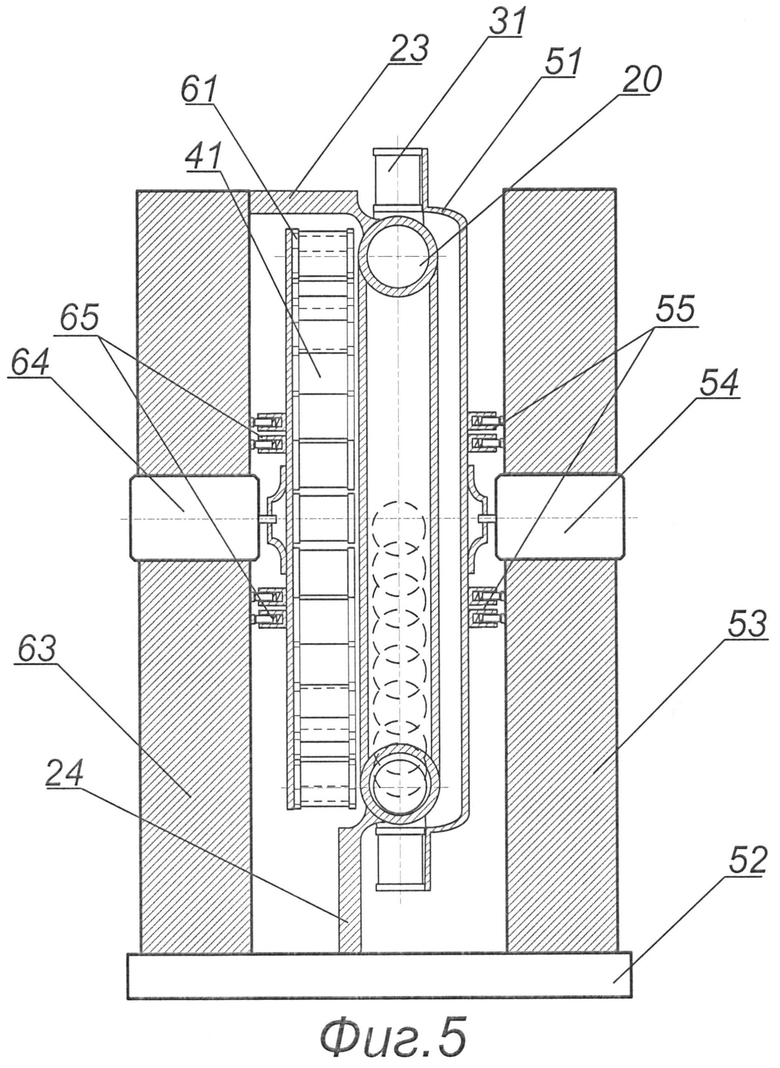
1. Инерционный движитель, состоящий из основания, жестко закрепленной на основании замкнутой диэлектрической полой трубки с помощью крепежной детали, отличающийся тем, что на основании закреплены две стойки, в одной стойке закреплен отдельный электродвигатель, на вал которого посажено колесо с электромагнитными катушками и токосъемными щетками, также эта стойка соединена крепежной деталью с замкнутой диэлектрической полой трубкой; в другой стойке закреплен отдельный электродвигатель, на вал которого посажено колесо с электромагнитными катушками и токосъемными щетками, на стойках находятся токоведущие шинки, соприкасающиеся со щетками колес, полая трубка представляет собой тор, полая трубка содержит внутри себя множество металлических масс.
2. Инерционный движитель по п.1, отличающийся тем, что электромагнитные катушки, закрепленные на колесах, имеют возможность притягивать металлические массы, находящиеся в замкнутой диэлектрической полой трубке.
3. Инерционный движитель по п.1, отличающийся тем, что металлические массы, находящиеся внутри замкнутой диэлектрической полой трубки, имеют возможность создавать центробежные силы, различающиеся по времени воздействия на инерционный движитель и противоположные по направлению воздействия на инерционный движитель.
4. Инерционный движитель по п.1, отличающийся тем, что колеса, посаженные на валы электродвигателей, имеют возможность встречно вращаться.
| ДВИЖИТЕЛЬ С ИСПОЛЬЗОВАНИЕМ УСКОРЯЮЩИХ МАСС | 2011 |
|
RU2467202C1 |
| ИНЕРЦИОННЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2034170C1 |
| ИНГАЛЯЦИОННОЕ УСТРОЙСТВО И АППАРАТ ДЛЯ ИНГАЛЯНТА | 2014 |
|
RU2608689C1 |
| RU 98102898 A, 20.12.1999 | |||
| RU 99102685 A, 20.12.2000 | |||

