Изобретение относится к области машиностроения, и в частности к цифровым рулевым приводам, предназначенным для отклонения камер жидкостных ракетных двигателей с целью создания управляющих моментов относительно центра масс ракеты-носителя для управления движением.
Предшествующий уровень техники
Известен цифровой привод, содержащий кожух, возвратный электромагнит и электромагниты с сердечниками возвратно-поступательного движения, число которых равно числу разрядов двоичного числа, а воздушные зазоры между ними равны соответственно одной, двум, четырем и т.д. единицам (см. авт. свид. СССР №185118, МКИ F15B 9/17, 1966 г.). Данное техническое решение принимаем за аналог предлагаемого изобретения. Это техническое решение работоспособно и отличается хорошей надежностью.
Однако, такие приводы вряд ли найдут применение в ракетной технике из-за повышенной массы и низкого быстродействия. Такие цифровые приводы нашли применение в маломощных системах управления.
Известен также цифровой рулевой привод для управления вектором тяги жидкостного ракетного двигателя.
Указанный цифровой преобразователь, включает гидроцилиндр с выходным штоком, цифроаналоговый привод, имеющий корпус, внутри которого последовательно расположены семь разрядных раздвижных поршней, семь электрогидравлических преобразователей, которые преобразуют электрические командные сигналы от системы управления, задаваемые в виде семиразрядного двоичного кода в поступательное перемещение штока. Задающими элементами цифрового аналогового преобразователя являются семь магнитоэлектрических преобразователей, которые соединяют полости между разрядными поршнями в зависимости от командного сигнала либо с нагнетанием, либо со сливом. Кроме того, в конструкцию такого привода входит управляющий золотник, обеспечивающий в зависимости от перемещения штока цифроаналогового преобразователя и рычагов обратной связи, подвод рабочей жидкости в гидроцилиндр. Имеется также фиксатор выходного штока, средства для крепления привода к соответствующим узлам жидкостного ракетного двигателя, датчик положения штока и патрубки подвода и слива рабочей жидкости (см. техн. описание жидкостного ракетного двигателя РД-170 под общей редакцией Б.И.Каторгина, с.54-57, 1995 г.). Данное техническое решение принимаем за прототип предлагаемого изобретения.
Несмотря на подтвержденную работоспособность и надежность прототипа, его высокая масса и стоимость, сложная гидромеханическая связь между первичным цифроаналоговым преобразователем и гидроцилиндром может рассматриваться как недостаток. Кроме того, в прототипе в качетсве цифроаналогового преобразователя используются маломощные электромагнитные приборы типа сопло-заслонка, которые не дают необходимого гидроусиления и необходимого кода штока и требуют последующих нескольких каскадов гидроусиления как по усилению, так и по ходу штока с необходимыми для этого случая сложными внутриобратными связями.
Раскрытие изобретения
В основу настоящего изобретения положена задача создания цифрового рулевого привода для управления вектором тяги жидкостного ракетного двигателя, обладающего меньшей массой, сравнительно низкой стоимостью и простой компоновкой привода.
Эта задача решена за счет того, что в цифровом рулевом приводе, включающем гидроцилиндр с выходным штоком, цифроаналоговый привод, имеющий корпус, внутри которого последовательно расположены несколько разрядных поршней, находящихся в зацеплении между собой, и столько же электрогидравлических преобразователей, которые соединяют полости разрядных поршней либо с коллектором управляющего давления, либо с коллектором слива, золотник-гидрораспределитель, обеспечивающий подвод управляющего давления в гидроцилиндр, датчик положения выходного штока, фиксатор выходного штока, средство для крепления корпуса гидроцилиндра и выходного штока к соответствующим узлам жидкостного ракетного двигателя, а также патрубки подвода и отвода управляющего давления в цифровой рулевой привод, при этом гидроцилиндр, золотник-гидрораспределитель и разрядные поршни цифроаналогового привода расположены на одной оси, а корпус гидроцилиндра жестко и герметично соединен с корпусом цифроаналогового привода, золотник-гидрораспределитель имеет управляющую полость, которая соединена с коллектором управляющего давления, выполнен в виде полого цилиндра с глухим дном и установлен внутри поршня гидроцилиндра, указанный золотник находится в зацеплении с поршнем высшего разряда и с поршнем гидроцилиндра и перемещается внутри него в пределах зазора δ, а его ход ограничен гайкой, а в его стенке выполнены: полость давления и две полости слива, при этом управляющие полости гидроцилиндра в зависимости от перемещения золотника-гидрораспределителя могут соединяться с полостью давления либо с полостями слива через каналы, выполненные в поршне гидроцилиндра, кроме того, полости слива сообщаются с входной полостью стабилизатора расхода, который жестко соединен с золотником-гидрораспределителем, причем полости разрядных поршней соединены с коллектором слива или с коллектором управляющего давления через гидромагистрали, в которых установлены электрогидроклапаны (для управляющих полостей поршней меньшего разряда) и гидромагистрали, в которых последовательно установлены электрогидроклапаны и гидроклапаны усиления для полостей поршней среднего и высшего разряда.
Другими отличиями предлагаемого цифрового рулевого привода являются:
- электрогидроклапан имеет электромагнит и затвор, который включает золотник и гильзу, при этом в гильзе выполнены две управляющие полости и полость слива, причем одна из управляющих полостей соединена с коллектором управляющего давления, а вторая - при перемещении золотника соединяется с первой управляющей полостью и с полостью поршня (поршней) меньшего разряда;
- гидроклапан усиления имеет поршень и затвор, который включает золотник и гильзу, при этом в гильзе выполнены две управляющие полости и полость слива, причем одна из управляющих полостей соединена с коллектором управляющего давления, а вторая - при перемещении золотника соединяется с первой управляющей полостью и через магистраль соединена с полостью поршня (поршней) большего разряда, кроме того, золотник выполнен за одно целое с поршнем, а его диаметр меньше диаметра поршня, причем управляющая полость поршня гидравлически соединена с управляющей полостью электрогидроклапана;
- каждый элемент зацепления разрядных поршней имеет в сечении Г-образную форму;
- стабилизатор расхода имеет корпус, содержащий входную полость и полость уменьшенного давления, разделенные перегородкой, в которой выполнены дроссельные отверстия, причем указанный корпус имеет крышку, внутри которой расположен подпружиненный чувствительный элемент с опорной поверхностью, кроме того, между чувствительным элементом и корпусом стабилизатора расхода выполнен регулирующий зазор, выход из которого соединен с патрубком слива, а кольцевая полость, в которой размещен чувствительный элемент, соединена с входной полостью стабилизатора расхода;
- фиксатор положения штока гидроцилиндра имеет корпус и полость, которая гидравлически соединена с коллектором управляющего давления, крышку, подпружиненный полый шток и чеку, при этом шток соединен с чекой с помощью винта, кроме того, в торце чеки выполнена П-образная проточка, взаимодействующая с кольцевым выступом, выполненным на штоке гидроцилиндра.
Технический результат состоит в упрощении компоновки привода, снижении массы и его стоимости.
Краткое описание чертежей
На фиг.1 представлено продольное сечение А-А цифрового рулевого привода;
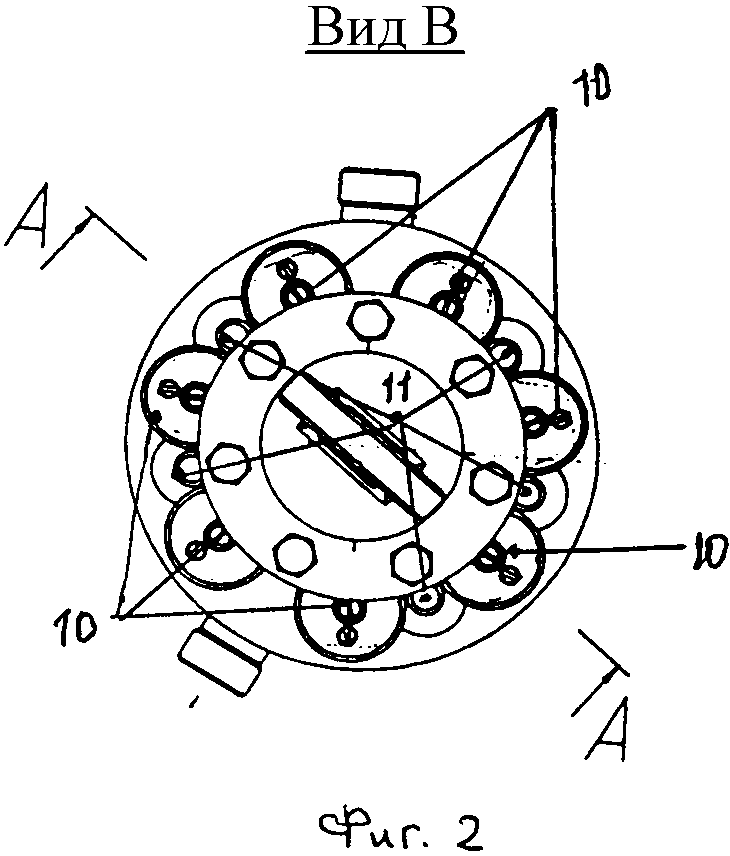
на фиг.2 представлен вид по В;
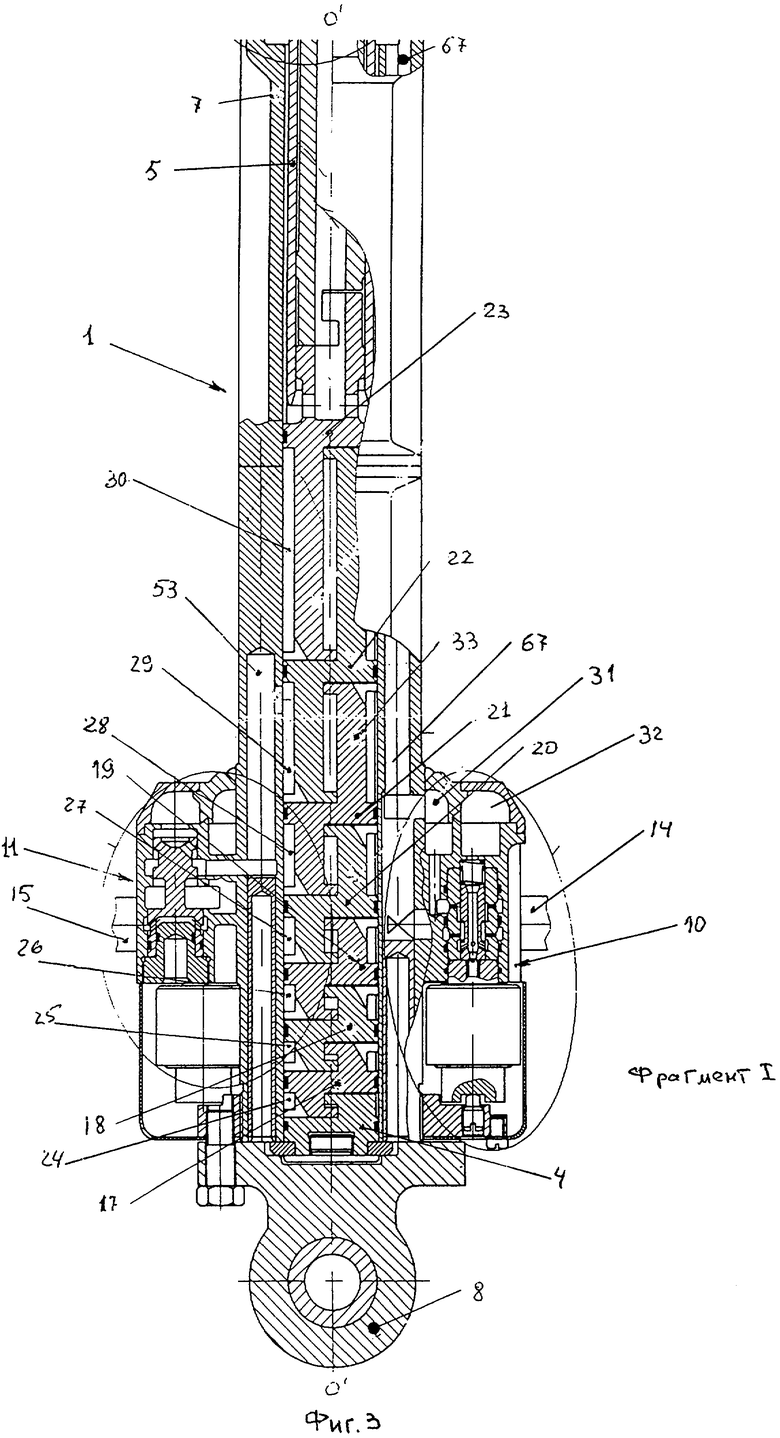
на фиг.3 представлен фрагмент I увеличенного сечения части продольного сечения фиг.1;
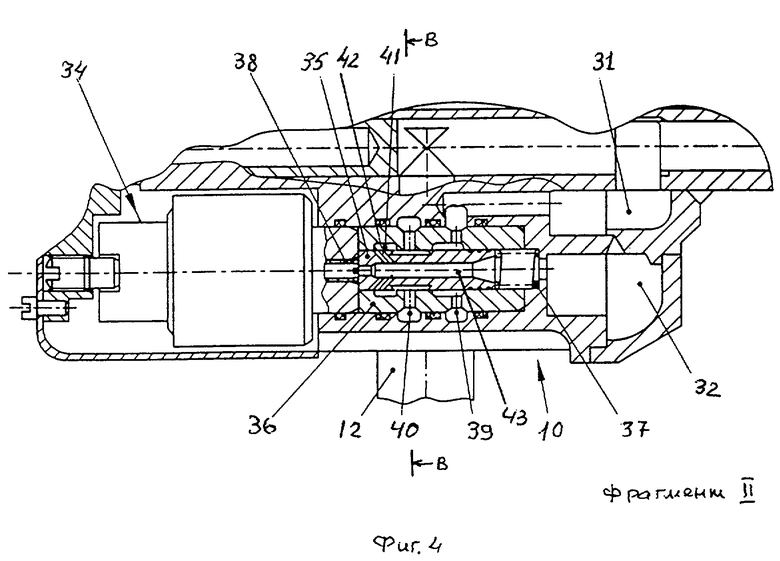
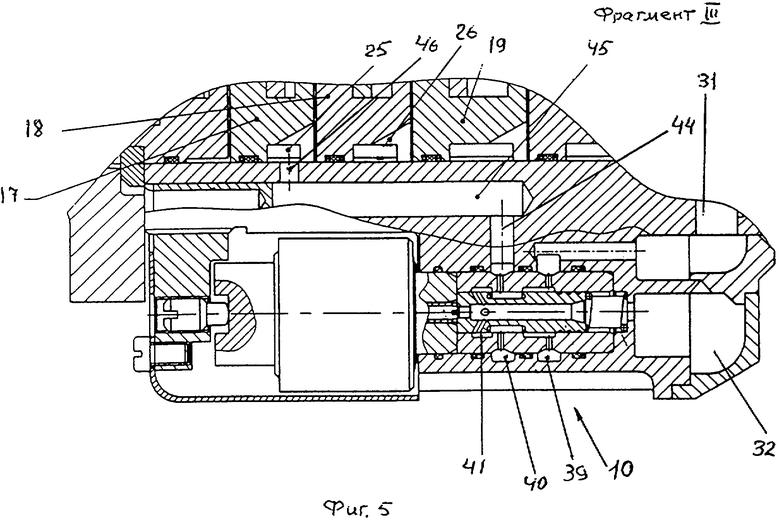
на фиг.4, фиг.5 представлены фрагменты II и III увеличенных сечений электрогидроклапана и его соединение с полостями разрядных поршней;
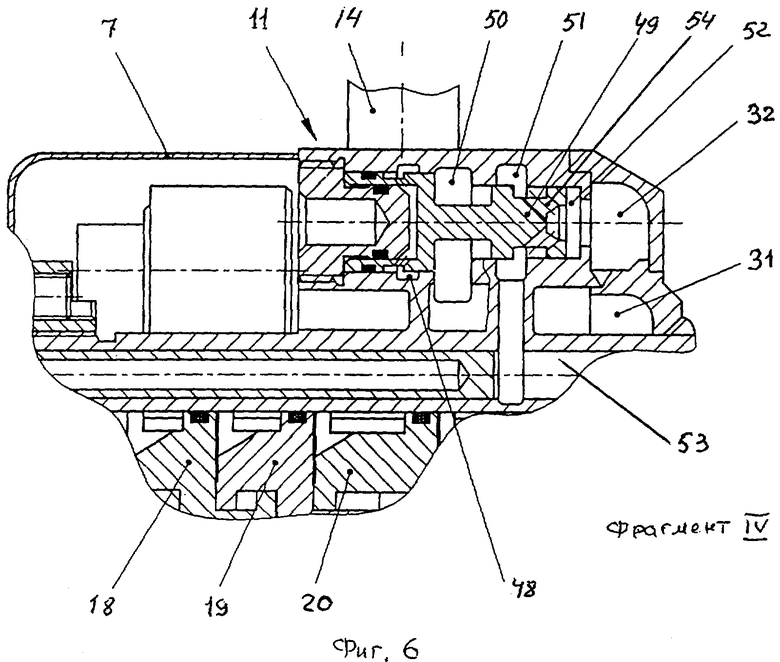
на фиг.6 представлен фрагмент IV увеличенного сечения гидроклапана усиления;
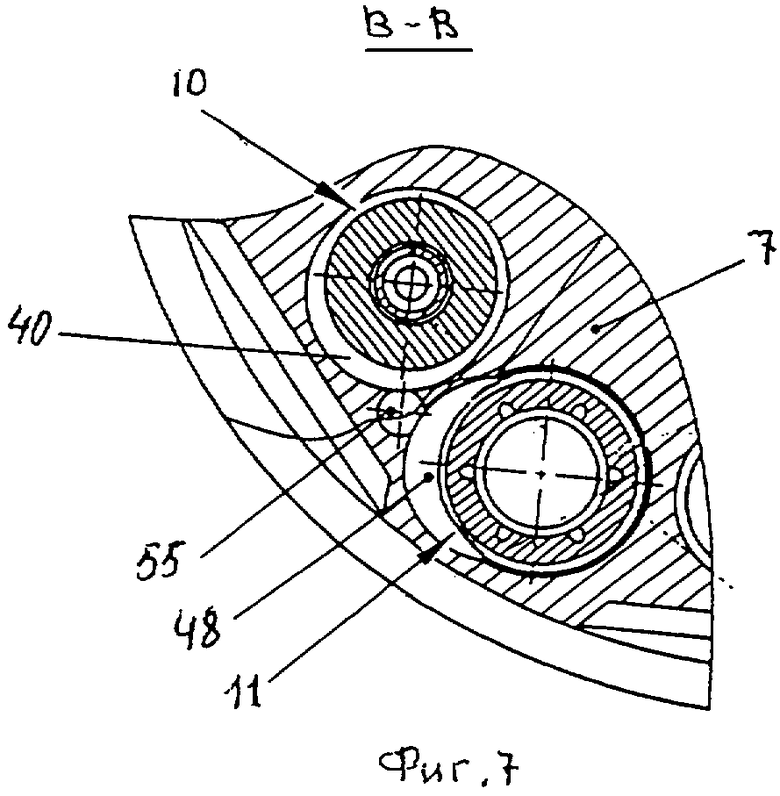
на фиг.7 представлено сечение по В-В на фиг.4;
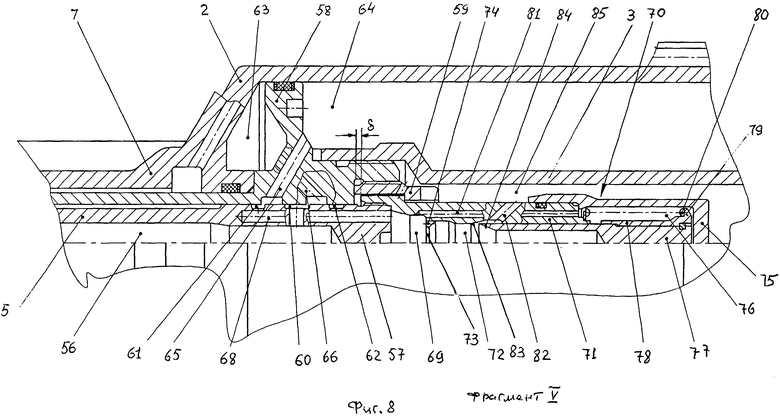
на фиг.8 представлен фрагмент V увеличенного сечения золотника-гидрораспределителя;
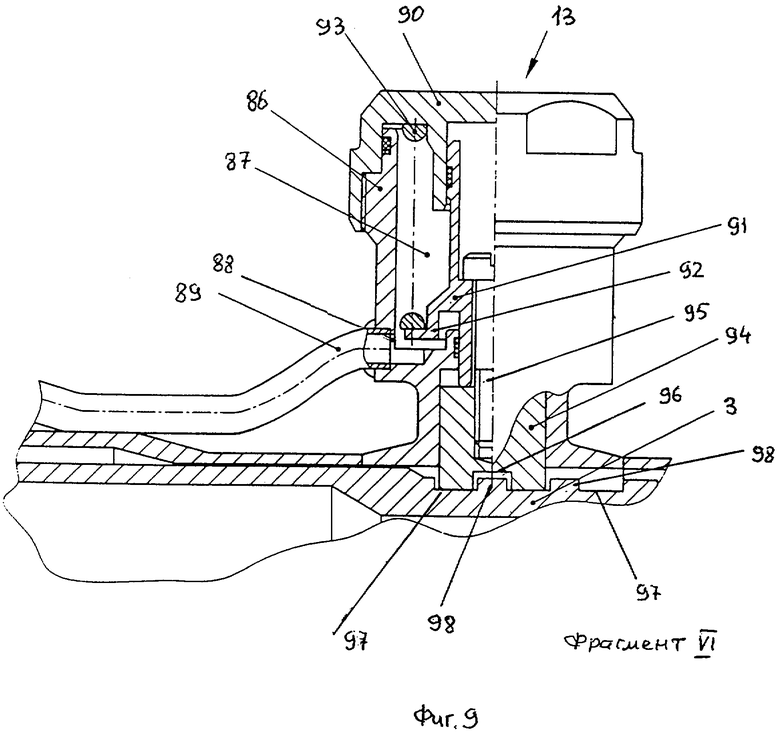
на фиг.9 представлен фрагмент VI увеличенного сечения фиксатора положения штока.
Пример реализации изобретения
Конструкция предлагаемого цифрового рулевого привода является семиразрядной. Семь разрядов в сумме обеспечивают 128 комбинаций положений штока, при этом происходит дискретное приращение хода шагом 1/128 от заданного диапазона указанных параметров. Цифровой рулевой привод 1 (Фиг.1) включает гидроцилиндр 2 со штоком 3, цифроаналоговый привод 4 и золотник-гидрораспределитель 5. На конце штока 3 закреплена серьга 6, с помощью которой шток 3 крепится к качающейся камере жидкостного ракетного двигателя (не показано). Корпус 7 гидроцилиндра 2 прочно соединен с корпусом 8 цифроаналогового привода 4 и находятся на одной оси О'-О'. К нижней части корпуса 8 прикреплен кронштейн 9, с помощью которого привод крепится к раме жидкостного ракетного двигателя (не показано).
В конструкцию привода входят: датчик положения 10 штока 3, фиксатор 11 положения штока 3, патрубок 12 подвода управляющего давления и два патрубка слива 13 и 14. По окружности корпуса 8 размещены (фиг.2, вид В) семь электрогидроклапанов 15 и пять гидроклапанов усиления 16.
В цифроаналоговом приводе (Фиг.3) применены семь разрядных поршней 17, 18, 19, 20, 21, 22, 23 и столько же полостей 24, 25, 26, 27, 28, 29, 30. Внутри корпуса 8 расположены коллектор управляющего давления 31 и коллектор слива 32. Коллектор управляющего давления 31 гидравлически соединен с патрубком 12 управляющего давления, а коллектор слива 32 - с патрубком слива 14. Электрогидроклапаны 15 и гидроклапаны усиления 16 предназначены для соединения полостей разрядных поршней с коллектором управляющего давления 31 или с коллектором слива 32.
Конструкция каждого разрядного поршня выбрана таким образом, что каждый такой поршень при своем движении входит в зацепление с соседним разрядным поршнем, перемещаясь на величину, отличающуюся от относительного перемещения соседнего разрядного поршня в два раза.
Каждый элемент зацепления 33 разрядных поршней выполнен за одно целое с разрядным поршнем и имеет в сечении Г-образную форму.
Каждый электрогидроклапан 15 (Фиг.4) управляется электромагнитом 34 и имеет золотник 35 и гильзу 36. Золотник 35 под действием пружины 37 или штока 38 может перемещаться в осевом направлении. Этот клапан имеет две управляющие полости 39, 40 и полость слива 41. Управляющая полость 39 сообщена с коллектором управляющего давления 31. Полость слива 41 через радиальные каналы 42 и осевой канал 43 сообщена с коллектором слива 32. Полость управления 40 (Фиг.5) через радиальный канал 44 и продольный канал 45 и канал 46 сообщается с полостью 25 поршня 18 младшего разряда (Фиг.5). Аналогично управляющая полость второго электрогидроклапана 15 через такой же канал (не показан), выполненный в корпусе 8, сообщена с полостью 26 второго поршня 19 младшего разряда. Управляющие полости остальных пяти электрогидроклапанов 15 сообщаются с полостями разрядных поршней следующих разрядов через гидроклапаны усиления 16.
Каждый гидроклапан усиления 16 (Фиг.6) управляется поршнем 47, который находится в управляющей полости 48. Поршень 47 выполнен за одно целое с золотником 49, при этом диаметр поршня больше диаметра золотника. Золотник 49 может перемещаться в осевом направлении за счет усилия, создаваемого управляющим давлением, действующим на разность сечений площадей поршня 47 и золотника 49. Гидроклапан усиления 16 имеет также две управляющие полости 50, 51 и полость слива 52. Управляющая полость 50 сообщена с коллектором управляющего давления 31, а полость слива 52 сообщена с коллектором слива 32. Управляющая полость 51 через продольный канал 53 большего диаметра (Фиг.3) сообщена с полостью 29 разрядного поршня 22. Кроме того, управляющая полость 51 при перемещении золотника 49 гидроклапана 16 влево соединяется с полостью слива 32 через каналы 54, выполненные в теле золотника 49. Управляющая полость 48 гидроклапана 16 через продольный канал 55 сообщается с управляющей полостью 40 электрогидроклапана 15 (Фиг.7, сечение В-В на Фиг.4). Полости 26, 27, 28 и 30 разрядных поршней 19, 20, 21 и 23 соединяются с коллектором управляющего давления 31 или с коллектором слива 32 через четыре гидромагистрали, в которых последовательно установлены соединенные между собой электрогидроклапан 15 и гидроклапан усиления 16.
Золотник-гидрораспределитель 5 (Фиг.8) имеет управляющую полость 56, выполнен в виде полого цилиндра с глухим дном 57 и установлен внутри поршня гидроцилиндра 2. Золотник-гидрораспределитель 5 находится в зацеплении с поршнем высшего разряда 23 и с поршнем 58 гидроцилиндра 2. Золотник-гидрораспределитель 5 перемещается внутри поршня 58 в пределах зазора δ, ограниченного гайкой 59. Поршень 58 жестко соединен со штоком 3 (Фиг.1). Золотник-гидрораспределитель 5 имеет полость давления 60 и две полости слива 61 и 62. Управляющие полости 63 и 64 гидроцилиндра 2 в зависимости от перемещения золотника-гидрораспределителя 5 могут соединяться либо с полостью давления 60, либо с полостями слива 61 и 62, через каналы 65 и 66, выполненные в поршне 58. Управляющая полость 56 золотника-гидрораспределителя 5 через продольный канал 67 сообщается с коллектором 31 управляющего давления (Фиг.З). Полости слива 61 и 62 через продольный канал 68 сообщаются с входной полостью 69 стабилизатора расхода 70.
Корпус 71 стабилизатора 70 расположен во внутренней полости штока 3 и жестко соединен с золотником-гидрораспределителем 5. В корпусе 71 стабилизатора 70 выполнена полость пониженного давления 72. Входная полость 69 и полость пониженного давления 72 разделены перегородкой 73, в которой выполнены дроссельные отверстия 74. С другой стороны корпуса стабилизатора закреплена крышка 75.
Во внутренней полости 76 крышки 75 подвижно установлен чувствительный элемент 77, выполненный в виде удлиненного стакана. На внешней поверхности чувствительного элемента 77 закреплена втулка 78, имеющая опорный бурт 79. Между буртом 79 и корпусом 71 стабилизатора расхода размещена пружина 80. Входная полость 69 сообщена с внутренней полостью 76 крышки 75 через продольный канал 81, выполненный в корпусе 71 стабилизатора. В корпусе 71 стабилизатора выполнен регулирующий зазор 82, образованный конической поверхностью 83 корпуса 71 и острой кромкой 84 чувствительного элемента 77. Регулирующий зазор 82 соединяет полость пониженного давления 72 с кольцевой полостью 85, образованной между цилиндрическими поверхностями штока 3 и корпуса 71 стабилизатора расхода 70. Эта полость сообщена с патрубком слива 13 (Фиг.1).
В корпусе 7 гидроцилиндра 2 установлен фиксатор (Фиг.9) положения 11 штока 3. В цилиндрическом корпусе 86 фиксатора 11 выполнена полость 87, которая через отверстие 88, выполненное в стенке корпуса 86, соединена с трубкой 89. Другой конец этой трубки сообщен с коллектором управляющего давления 31. Цилиндрический корпус 86 фиксатора закрыт крышкой 90. Внутри цилиндрического корпуса 86 подвижно установлен полый шток 91, имеющий фланец 92. Между фланцем 92 и крышкой 90 установлена пружина 93. Внутри корпуса 86 фиксатора также установлена цилиндрическая чека 94, которая с помощью винта 95 соединена с полым штоком 91. В торце чеки 94 выполнен П-образный паз 96, а на внешней поверхности выходного штока 3 гидроцилиндра 2 выполнены кольцевые проточки 97 и выступы 98. При фиксации штока 3 П-образный паз 96 чеки 94 входит в кольцевой выступ 98.
Перемещение штока 3 фиксируется датчиком положения 10, расположенным на корпусе 7 гидроцилиндра 2. Шток датчика положения через полукольцо соединен со штоком 3 (не показано).
Наличие в данном изобретении гидроцилиндра с указанным поршнем позволило выполнить наиболее простую компоновку цифрового рулевого привода. Применение в этой конструкции привода электрогидроклапанов и гидроклапанов усиления вместо электромагнитных преобразователей позволило за счет повышенного расхода управляющей жидкости, подаваемой в полости разрядных поршней повысить быстродействие рабочих агрегатов привода.
Кроме того, предлагаемая конструкция цифрового рулевого привода позволяет отказаться от агрегатов, контролирующих внешние и внутренние обратные связи, обеспечивающих стабилизацию управляющего давления, от масляных систем и технического обслуживания приводов в составе ракеты-носителя.
Работа устройства
Перед запуском жидкостного ракетного двигателя гидравлическая система цифрового рулевого привода соединена со входом и выходом центробежного насоса горючего турбонасосного агрегата. При этом внутренние полости рулевого привода и полость горючего жидкостного ракетного двигателя вакуумируются, а затем заполняются горючим - керосином. В это время выходной шток 3 находится в среднем положении и зафиксирован чекой 94 фиксатора положения 11. Электромагниты 34 электрогидроклапанов 15 обесточены.
Отклонение камер ЖРД осуществляется в соответствии с электрическими командами, подаваемыми на ряд электромагнитов электрогидроклапанов 15, отвечающих среднему положению штока 3. При нарастании давления в управляющей полости 87 фиксатора положения 11 штока 3 (Фиг.9), чека 94, преодолевая усилие пружины 93, выходит из зацепления с выходным штоком 3 (П-образный паз 96 отходит от кольцевого выступа 98).
Для изменения положения выходного штока производится подача электрической команды на соответствующие электромагниты 34 электрогидроклапанов 15. При этом (Фиг.4) шток 24 электромагнита 34 перемещает золотник 35, сжимая пружину 37. Это приводит к разобщению полости слива 41 с управляющей полостью 40 и сообщению управляющей полости 40 с управляющей полостью 39, которая в свою очередь сообщается с коллектором управляющего давления 31, при этом полость слива 41 через радиальные каналы 42 в золотнике 35 и осевой канал 43 соединяется с коллектором слива 32. После этого управляющее давление с выхода из упровляющей полости 40 по каналам 44, 45 и 46 (Фиг.5) поступает непосредственно в полость 24 разрядного поршня 17 (поршня меньшего разряда). Аналогично полость 25 разрядного поршня 18 также сообщается с коллектором управляющего давления 31 через другой электрогидроклапан 15 (не показано). В полости 26, 27, 28, 29 и 30 разрядных поршней 19, 20, 21, 22 и 23 управляющее давление из коллектора 31 поступает через пять автономных гидромагистралей, в которых установлены электрогидроклапан 15 и гидроклапан усиления 16. Так, например, после срабатывания следующего электрогидроклапана 10, управляющее давление из управляющей полости 40 поступает в управляющую полость 48 (Фиг.7) гидроклапана усиления 16. Следует заметить, что до этого управляющая полость 50 гидроклапана усиления 16 находится в соединении с коллектором управляющего давления 31. Так как диаметр поршня 47 больше диаметра золотника 49, то золотник 49 будет перемещаться вправо за счет усилия, создаваемого давлением рабочей жидкости, действующей на разность сечений площадей поршня 47 и золотника 49. В результате этого, управляющая полость 50 соединяется с управляющей полостью 51, которая через продольный канал 53 большего сечения (Фиг.3) сообщается с полостью 29 разрядного поршня 22. Аналогично при срабатывании следующих электрогидроклапанов 15, установленных в других гидромагистралях, происходит перемещение золотников 49 других гидроклапанов усиления 16. В результате этого управляющее давление из полостей 51 будет поступать в полости 26, 27, 28 и 30 разрядных поршней 19, 20, 21 и 23. В следствие этого система из семи разрядных поршней будет сдвигаться вдоль оси О'-О' вверх, перемещая золотник-гидрораспределитель 5 в пределах зазора δ, ограниченного гайкой 59.
При перемещении указанного золотника 5 управляющее давление из полости давления 60 поступает в полость 63 гидроцилиндра 2 через канал 66, выполненный в поршне 58. Одновременно другая полость 64 гидроцилиндра 2 через канал 65, выполненный в поршне 58, сообщается с полостью слива 61, при этом происходит перемещение поршня 58. Из этой полости рабочая жидкость через продольный канал 68 поступает во входную полость 69 стабилизатора расхода 70. В результате этого поршень 58 со штоком 3 будет перемещаться до тех пор, пока не произойдет замыкание седьмого разрядного поршня 23 и установка золотника-гидрораспределителя 5 в нейтральное положение.
Стабилизация расхода рабочей жидкости на выходе из управляющих полостей 63 и 64 гидроцилиндра 2 осуществляется следующим образом. Рабочая жидкость из полости слива 61 по каналу 68 поступает во входную полость 69 стабилизатора расхода 70, а из нее через дросселирующие отверстия 74, выполненные в перегородке 73, входит в полость пониженного давления 72 и далее через регулирующий зазор 82 попадает в сливную полость 85, откуда через патрубок слива 13 направляется на вход насоса горючего. Одновременно рабочая жидкость из входной полости 69 через продольный канал 81 в корпусе 71 попадает в полость 76. Так как гидравлическое сопротивление между полостями 69 и 72 осуществляется дросселирующими отверстиями 74, то при постоянном перепаде давлений на них обеспечивается постоянный расход через стабилизатор расхода 70. Величина перепада давлений определяется усилием соответствующей величины сжатия пружины 80, деленной на эффективную площадь чувствительного элемента 77. Когда перепад давлений между полостями 69 и 72 отклоняется в большую сторону, чувствительный элемент 77 под действием сил от перепада давлений, действующих на эффективную площадь, перемещается, уменьшая регулирующий зазор 82, определяя им проходное сечение и понижая расход через стабилизатор расхода 70. Когда перепад давлений между полостями 69 и 72 отклоняется в меньшую сторону, чувствительный элемент 77, перемещается, увеличивая регулирующий зазор 82, что приводит к повышению расхода жидкости через стабилизатор.
Таким образом, наличие стабилизатора расхода, установленного на магистрали слива рабочей жидкости из полостей гидроцилиндра, позволяет поддерживать стабильную скорость перемещения штока 3 цифрового рулевого привода.
Промышленное применение
Предложенный цифровой рулевой привод отличается простотой конструкции, обладает меньшей массой и низкой стоимостью. Привод найдет применение в ракетной технике для управления вектором тяги жидкостных ракетных двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2012 |
|
RU2521446C1 |
| РЕГУЛИРУЕМЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2200866C2 |
| РЕГУЛЯТОР РАСХОДА ЖИДКОСТИ | 2000 |
|
RU2185652C2 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Система автоматического управления гидромеханической трансмиссией | 1990 |
|
SU1763257A2 |
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Рулевое управление транспортного средства | 1984 |
|
SU1217709A1 |
Изобретение относится к области машиностроения, и в частности к цифровым рулевым приводам, предназначенным для отклонения камер жидкостных ракетных двигателей. Привод включает гидроцилиндр с выходным штоком, цифроаналоговый привод, имеющий корпус, внутри которого последовательно расположены несколько разрядных поршней, находящихся в зацеплении между собой, и столько же электрогидравлических преобразователей, которые соединяют полости разрядных поршней либо с коллектором управляющего давления, либо с коллектором слива, золотник-гидрораспределитель, обеспечивающий подвод управляющего давления в гидроцилиндр, датчик положения выходного штока, фиксатор выходного штока, средство для крепления корпуса гидроцилиндра и выходного штока к соответствующим узлам жидкостного ракетного двигателя, а также патрубки подвода и отвода управляющего давления в цифровой рулевой привод, при этом гидроцилиндр, золотник-гидрораспределитель и разрядные поршни цифроаналогового привода расположены на одной оси, при этом корпус гидроцилиндра жестко и герметично соединен с корпусом цифроаналогового привода, золотник-гидрораспределитель имеет управляющую полость, которая соединена с коллектором управляющего давления, выполнен в виде полого цилиндра с глухим дном и установлен внутри поршня гидроцилиндра, указанный золотник находится в зацеплении с поршнем высшего разряда и с поршнем гидроцилиндра и перемещается внутри него в пределах зазора δ, а его ход ограничен гайкой, а в его стенке выполнены: полость давления, две полости слива, при этом управляющие полости гидроцилиндра в зависимости от перемещения золотника-гидрораспределителя могут соединяться с полостью давления либо с полостями слива через каналы, выполненные в поршне гидроцилиндра, кроме того, полости слива сообщаются с входной полостью стабилизатора расхода, который жестко соединен с золотником-гидрораспределителем, причем полости разрядных поршней соединены с коллектором слива или коллектором управляющего давления через гидромагистрали, в которых установлены электрогидроклапаны (для полостей поршней меньшего разряда) и гидромагистрали, в которых последовательно установлены электрогидроклапаны и гидроклапаны усиления для полостей поршней среднего и высшего разряда. Технический результат - повышение быстродействия рабочих агрегатов привода. 6 з.п. ф-лы, 9 ил.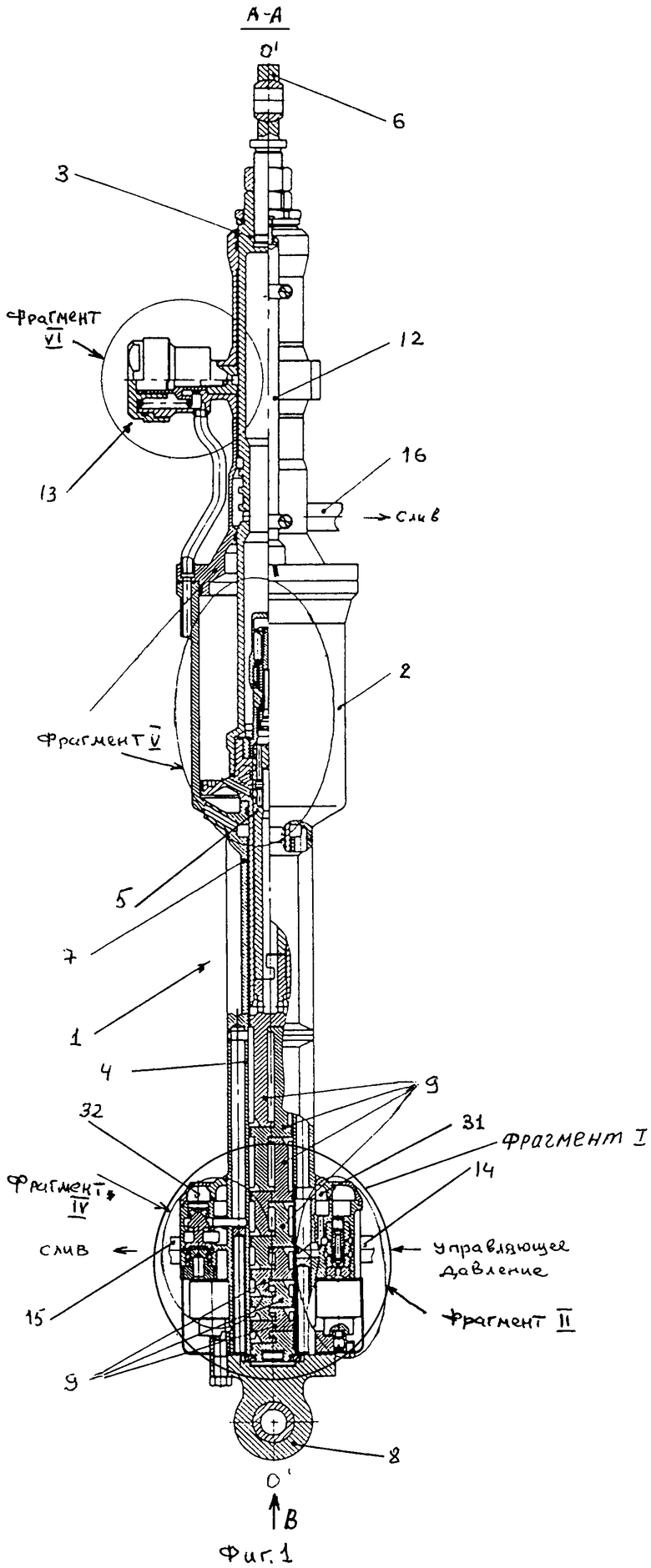
1. Цифровой рулевой привод, включающий гидроцилиндр с выходным штоком, цифроаналоговый привод, имеющий корпус, внутри которого последовательно расположены несколько разрядных поршней, находящихся в зацеплении между собой, и столько же электрогидравлических преобразователей, которые соединяют полости разрядных поршней либо с коллектором управляющего давления, либо с коллектором слива, золотник-гидрораспределитель, обеспечивающий подвод управляющего давления в гидроцилиндр, датчик положения выходного штока, фиксатор выходного штока, средство для крепления корпуса гидроцилиндра и выходного штока к соответствующим узлам жидкостного ракетного двигателя, а также патрубки подвода и отвода управляющего давления в цифровой рулевой привод, отличающийся тем, что гидроцилиндр, золотник-гидрораспределитель и разрядные поршни цифроаналогового привода расположены на одной оси, при этом корпус гидроцилиндра жестко и герметично соединен с корпусом цифроаналогового привода, золотник-гидрораспределитель имеет управляющую полость, которая соединена с коллектором управляющего давления, выполнен в виде полого цилиндра с глухим дном и установлен внутри поршня гидроцилиндра, указанный золотник находится в зацеплении с поршнем высшего разряда и с поршнем гидроцилиндра и перемещается внутри него в пределах зазора δ, а его ход ограничен гайкой, а в его стенке выполнены: полость давления, две полости слива, при этом управляющие полости гидроцилиндра в зависимости от перемещения золотника-гидрораспределителя могут соединяться с полостью давления либо с полостями слива через каналы, выполненные в поршне гидроцилиндра, кроме того, полости слива сообщаются с входной полостью стабилизатора расхода, который жестко соединен с золотником-гидрораспределителем, причем полости разрядных поршней соединены с коллектором слива или коллектором управляющего давления через гидромагистрали, в которых установлены электрогидроклапаны (для полостей поршней меньшего разряда) и гидромагистрали, в которых последовательно установлены электрогидроклапаны и гидроклапаны усиления для полостей поршней среднего и высшего разряда.
2. Цифровой рулевой привод по п.1, отличающийся тем, что число электрогидроклапанов и число разрядных поршней равно семи, а число гидроклапанов усиления равно пяти, причем электрогидроклапаны и гидроклапаны усиления размещены в нижней части корпуса цифроаналогового привода по окружности.
3. Цифровой рулевой привод по п.1, отличающийся тем, что электрогидроклапан имеет электромагнит и затвор, который включает золотник и гильзу, при этом в гильзе выполнены две управляющие полости и полость слива, причем одна из управляющих полостей соединена с коллектором управляющего давления, а вторая - при перемещении золотника соединяется с первой управляющей полостью и с управляющей полостью поршня (поршней) меньшего разряда.
4. Цифровой рулевой привод по п.1, отличающийся тем, что гидроклапан усиления имеет поршень и затвор, который включает золотник и гильзу, при этом в гильзе выполнены две управляющие полости и полость слива, причем одна из управляющих полостей соединена с коллектором управляющего давления, а вторая - при перемещении золотника соединяется с первой управляющей полостью и через магистраль соединена с управляющей полостью поршня (поршней) большего разряда, кроме того, золотник выполнен за одно целое с поршнем, а его диаметр меньше диаметра поршня, причем управляющая полость поршня гидравлически соединена с управляющей полостью электрогидроклапана.
5. Цифровой рулевой привод по п.1, отличающийся тем, что каждый элемент зацепления разрядных поршней и гидроклапана усиления имеет в сечении Г-образную форму.
6. Цифровой рулевой привод по п.1, отличающийся тем, что стабилизатор расхода имеет корпус, содержащий входную полость и полость уменьшенного давления, разделенные перегородкой, в которой выполнены дроссельные отверстия, причем указанный корпус имеет крышку, внутри которой расположен подпружиненный чувствительный элемент с опорной поверхностью, кроме того, между чувствительным элементом и корпусом стабилизатора расхода выполнен регулирующий зазор, выход из которого соединен с патрубком слива, а кольцевая полость, в которой размещен чувствительный элемент, соединена с входной полостью стабилизатора расхода.
7. Цифровой рулевой привод по п.1, отличающийся тем, что фиксатор положения выходного штока гидроцилиндра имеет корпус и полость, которая гидравлически соединена с коллектором управляющего давления, крышку, подпружиненный полый шток и чеку, при этом шток соединен с чекой с помощью винта, кроме того, в торце чеки выполнена П-образная проточка, взаимодействующая с кольцевым выступом, выполненным на выходном штоке гидроцилиндра.
| ЦИФРОВОЙ ПРИВОД | 0 |
|
SU185118A1 |
| Цифровой привод | 1990 |
|
SU1791625A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 0 |
|
SU393481A1 |
| Устройство для сбраживания сахаристых веществ | 1929 |
|
SU45228A1 |
| Огнетушитель | 0 |
|
SU91A1 |

