Изобретение относится к строительному и дорожному машиностроению, а именно к управлению рабочими органами землеройных машин.
Известна система управления рабочим органом, содержащая силовой цилиндр, цилиндр слежения, гидрораспределитель, насос основного гидропривода, насос, приводимый от ведомого колеса, и насос, приводимый от ведущего колеса 1.
Недостатком указанной системы является слохсность конструкции и низкая надежность.
Наиболее близкой к предлагаемой является следящая система управления рабочим органом, включающая силовой цилиндр подъема рабочего органа, распределитель с подпружиненным золотником, рукоять управления распределителем и механизм обратной связи силового цилиндра 2 ).
Однако известная следящая система управления имеет сложную систему рлчагов и связь непосредственно с, рабочим органом, что может привести к Повреждению систем: управления грунтом при работе зеиперойно-транспортной машины; кроме того, невозможна установка плавающего положения,
необходимого при планировочных работах, что сужает область применения cиcтe u управления.
Цель, изобретения. - расширение технологических возможностей г ашины.
Указанная цель достигается тем, что машина снабжена установленным между распределителем и силовым цилиндром электрогидравлическим клапа10ном и сообщенным с последним пнёвмогидроаккумулятором с предохранительным клапаног, а механизм обратной связи выполнен из параллельно расположенных между собой и установленных
5 между распределителем и электрогидроклапаном регулируемого дросселя и гадродвигателя и из трособлочкой систе14л с барабаном, на котором закреплена рукоять управления с прием20ным блоком, установленным на валу шдродвигателя, и с промежуточным блоком, смонтированным на золотнике распределит еля.
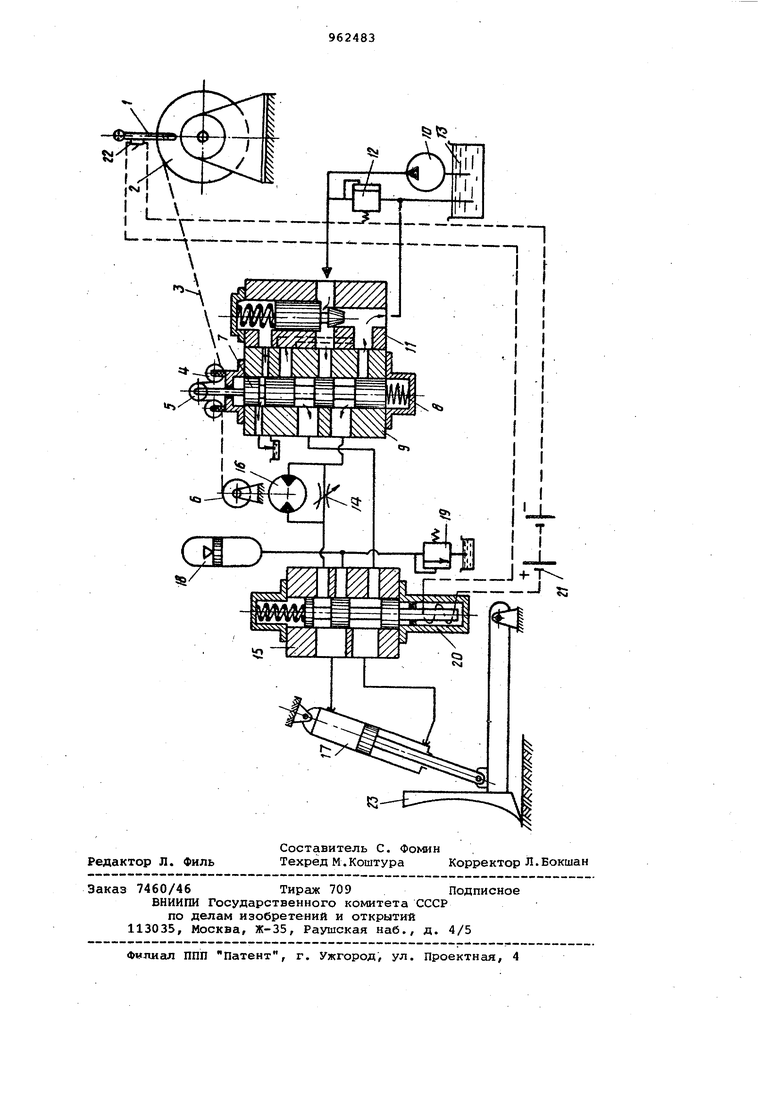
На чертеже изображена кинематическая схема следящей систеьвл управления зе1«1ероПной машины.
Система управления включает ручку 1 управления, смонтированную на корпусе поворотного барабана 2. Трос 3
30 закреплен на барабане и через неподвижные блоки 4 и подвижный блок 5 соединен с приемным барабаном 6. По вижный блок 5 закреплен на золотнике 7, соединенном с пружиной 8 и Вмонтированном в корпус распределителя 9. Распределитель 9 соединен с гидронасосом 10, переливным 11 и предохранительным 12 клапанами, масляным баком 13 и через регулируемый дроссель 14 с электрогидроклапаном 15. Параллельно регулируемому дросселю 14 подключен гидромЬтор 16 двухстороннего действия, на валу ко торого установлен приемный барабан Электрогидроклапан 15 соединен с си ловым гидроцилиндром 17, гидропневмоаккумулятором 18 и предохранитель ным клапаном 19. Электрогидроклапан 15 снабжен электромагнитом 20, соединенным с аккумуляторной батареей 21 и тумблером 22, смонтированным на ручке 1 управления. Силовой гидроцилиндр 17 соединен с рабочим органом 23. Устройство работает следующим образом. При выполнении операции копания грунта Электрогидроклапан 15 выключен и через его корпус жидкость от распределителя 9 проходит к гидроцилиндру 17. При необходимости выглубления рабочего органа 23 оператор перемещает ручку управления на себя (на схеме по часовой Стрелке) с необходимой скоростью. Трос 3 наматывается на барабан 2, перемещает золотник 7 распределителя 9 вниз и сжимает пружину 8. Рабочая жидкость че рез .переливной клапан 11, корпус распределителя 9. и электрогидроклапан 15 поступает в нижнюю (штоковую полость силового гидроцилиндра 17. Поршень гидроцилиндра перемещается вверх, выглубляя рабочий орган 23, и вытесняет рабочую жидкость из вер ней (поршневой) полости гидроцилинд ра 17, которая проходит через злект рогидроклапан 15, регулируемый дрос сель 14, корпус распределителя 9 и переливной клапан 11 в бак 13. Так как проходное сечение регулируемого дросселя 14 мало для того, чтобы (Пропустить всю рабочую жидкость, поступающую от гидроцилиндра 17, то часть ее пройдет на слив через гидромотор 16, который, вращаясь по часовой стрелке, сматывает трос 3, закрепленный на нем. Ослабление натяжения троса приводит к тому, что золотник 7 под действием пружины 8 начинает перемещаться -вверх, перекрывая рабочие окна распределителя останавливая гидроцилиндр 17 и гидромотор 16. При увеличении угла поворота ручки 1 управления по часовой стрелке , происходит дальнейшее выглубление рабочего органа 23 со скоростью, пропорциональной скорости вращения ручки 1 управления. Дросселем 14 можно регулировать расход жидкости через гидромотор 16, изменяя тем самым величину перемещения рабочего органа 23 при одном и том же перемещении ручки 1 управления, т.е. дроссель 14 позволяет регулировать коэффициент усиления следящей систеил управления, При необходимости заглубления рабочего органа 23 оператор перемещает ручку 1 управления от себя (на схеме против часовой стрелки). Трос 3 при вращении барабана 2 ослабляется, и золотник 7 под действием пружины 8 перемещается вверх. Жидкость от насоса 10 через переливной клапан 11, корпус распределителя 9, дроссель 14 и корпус электрогидроклапана 15 поступает в поршневую полость гидроцилиндра 17, заглубляющего рабочий орган 23. Часть жидкости, которую не пропустит дроссел-ь 14, пройдет в гидроцилиндр 17 через гидромотор 16. Последний, вращаясь против часовой стрелки, натянет трос 3. Золотник 7 под действием натяжения троса 3 перемещается вниз, закрывая рабочие окна распределителя 9 и останавливая силовой гидрогтилиндр 17. При увеличении угла поворота ручки 1 управления против часовой стрелки происходит дальнейшее заглубление рабочего органа 23 со скоростью, пропорциональной скорости перемещения ручки 1 управления. Для установки плавающего положения оператор опускает рабочий орган 23 на грунт и включает тумблер 22, установленный на ручке 1 управления. Напряжение от аккумуляторной батареи 21 поступает в электромагнит 20, который, срабатывая, включает Электрогидроклапан 15. При этом полости гидроцилиндра 17 отсоединяются от дросселя 14 и распределителя 9 и, замыкаясь между собой, подключаются к гидропневмоаккумулятору 18 и предохранительному клапану 19. Если теперь к рабочему органу 23 будут приложены внешние силы, то он под их воздействием будет свободно перемещаться. Рабочая/жидкость при этом перетекает из штоковой полости гидроцилиндра 17 в поршневую (или наоборот) через Электрогидроклапан 15. Так как объем жидкости, вытесняемой из поршневой полости гидроцилиндра 17, больше объема, который может войти в штоковую полость-, из-за наличия в ней штока гидроцилиндра, то
лишняя жидкость, пройдя электрогидроклапан 15, зарядит гидропневмоаккумулятор 18. При обратном движении рабочегЪ органа 23 жидкость из гидропневмоаккумулятора 18 под действием находящегося в его верхней полости воздуха будет заполнять поршневую полость гидроцилиндра 17 вместе с жидкостью, вытесняемой из его штоковой полости. При полной зарядке гидропневмоаккумулятора, когда давление жидкости в нем превысит величчину настройки предохранительного клапана 19, последний срабатывает и перепускает жидкость на слив в бак 13.
Применение барабана, гибкого троса, запасованного по системе блоков, подпружиненного золотника, гадромотора, включенного парсшлельно регулируемому дросселю и имеющего укрепленный на валу приемный барабан, электрозолотника и гидропневмоаккумулятора позволяет отсоединить обратную связь от рабочего органа и осуществить его плавающее положение.
Использование предлагаемой следящей cиcтe и управления дает положительнь1й экономический эффект, так как позволяет оператору быстрее реагировать на быстрой3меняющиеся условия процесса копания в широком диапазоне характеристик грунта и обеспечить полное использование- тяговой мощности землеройной машины, что приведет к увеличению рабочей ско:рости и, как следствие, к увеличению
производительности землеройной машины.
Формула изобретения Следящая система управления рабочим органом землеройной машины,
включающая силовой цилиндр подъема рабочего органа, распределитель с подпружиненным золотником, рукоять управления распределителем и механизм обратной связи силового цилиндра, отличающаяся тем, что, с целью расширения технологических возможностей, она снабжена установленным межцу распределителем и силовым цилиндром электрогидравлическим клапаном и сообщенным с последним пневмогидроаккумулятором с предохранительным клапаном, а механизм обратной связи выполнен из параллельно расположенных между собой
и установленньсс меясду распределителем и электрогидравлическим клапаном регулируемого дросселя и гидродвигателя и из трособлочной системы с барабаном, на котором закреплена рукоять .управления с приемным блоком, установленным на валу гидродвигателя, и с промежуточным блоком, смонтированным на золотнике распределителя.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свитедельство СССР 206417, кл. Е 02 F 9/22, 1966.
2.Авторское свидетельство СССР W 424950, кл. Е 02 F 9/22, 1971
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1076551A1 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1074975A2 |
| Следящий гидропривод рабочего органа землеройной машины | 1982 |
|
SU1084391A1 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| Землеройная машина | 1979 |
|
SU861510A1 |
| Гидропривод землеройной машины | 1980 |
|
SU866077A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| Гидропривод рабочего органа землеройной машины | 1990 |
|
SU1773274A3 |
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |