Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок и повреждения стреловых грузоподъемных кранов с телескопической (гидравлической) или решетчатой стрелой.
Известен способ защиты грузоподъемного механизма от перегрузки путем формирования сигнала управления грузоподъемным механизмом, измерения веса поднимаемого груза, выявления перегрузки грузоподъемного механизма путем сопоставления измеренного и предельно допустимого веса груза, и последующей блокировки сигнала управления грузоподъемным механизмом при наличии перегрузки [1].
Устройство для реализации этого способа содержит датчик веса поднимаемого груза, соединенный со входом блока управления, содержащим исполнительное реле блокировки. Контакты реле блокировки включены в цепь управления грузоподъемным механизмом [1].
Недостатком известного способа и устройства для его реализации является отсутствие защиты грузоподъемного оборудования от повреждения при столкновении с различными препятствиями при работе в стесненных условиях (отсутствие координатной защиты).
Кроме того, в известном способе и устройстве для его реализации формирование сигналов управления грузоподъемным механизмом и сигнала блокировки этого управления осуществляется одновременно. Т.е. несмотря на наличие перегрузки, сигнал управления грузоподъемным механизмом продолжает формироваться, а предотвращение дальнейшей перегрузки грузоподъемного механизма осуществляется путем блокировки сформированного сигнала управления. Это приводит к снижению надежности защиты. В частности, в случае отказа электронного блока или реле блокировки управление грузоподъемным механизмом не прекращается, что приводит к его дальнейшей перегрузке и повреждению.
Более совершенным и наиболее близким к предложенному является способ защиты грузоподъемного крана от перегрузки и повреждения, заключающийся в том, что формируют сигналы управления гидрораспределителями исполнительных механизмов грузоподъемного крана, осуществляют вычисление грузового момента и сравнение его с предельно допустимым, задание зоны допустимых положений грузоподъемного стрелового оборудования, определение фактического положения этого оборудования и сравнение этого положения с зоной допустимых положений, после чего в зависимости от полученных данных осуществляют отключение указанных сигналов управления гидрораспределитями исполнительных механизмов крана [2].
Известное устройство, наиболее близкое к предложенному, содержит электронный блок (цифровую вычислительную машину), в котором хранятся данные о допустимых режимах нагружения и зоне допустимого положения грузоподъемного стрелового оборудования. Электронный блок имеет элементы индикации и органы управления. Устройство содержит также датчик угла наклона стрелы, датчик азимута и датчики определения усилия, данные которых сравниваются с заданными параметрами в электронном блоке. Причем указанные датчики и блок выходных реле подключены к электронному блоку по радиальной схеме (при помощи отдельных проводов) [3].
Электронный блок производит опрос датчиков, вычисляет степень загрузки крана по грузовому моменту, определяет фактическое положение грузоподъемного стрелового оборудования крана, производит сравнение этого положения с заданной зоной допустимых положений, а также формирует сигналы блокировки управления механизмами крана в случае перегрузки крана по грузовому моменту и выхода грузоподъемного стрелового оборудования из зоны допустимых положений (осуществляет координатную защиту). Сигналы блокировки в виде контактов исполнительных реле включаются в цепи сигналов управления. Крановщик имеет возможность формировать сигналы управления механизмами крана в ручном режиме одновременно и независимо от загрузки крана и положения грузоподъемного оборудования, и далее эти сигналы поступают на исполнительные механизмы крана или блокируются контактами исполнительных реле.
Поэтому в данном способе и реализующем его устройстве перегрузка крана по грузовому моменту или перемещение грузоподъемного оборудования в запрещенную зону приводят не к отсутствию формирования сигналов управления механизмами крана, а только к их блокировке (отключению) на промежуточном этапе. Это приводит к снижению надежности защиты крана, поскольку в случае отказа электронного блока или реле блокировки управление краном не прекращается.
Кроме того, в известном способе и реализующем его устройстве отказ блокировки перемещения какого-либо механизма крана не может компенсироваться автоматическим включением движения другого механизма, компенсирующего действие механизма с отказавшей блокировкой. Если, например, крановщик формирует управляющие воздействия на опускание стрелы и происходит перегрузка крана по грузовому моменту, то в случае отсутствия блокировки дальнейшего опускания стрелы из-за отказа механизмов крана, гидрораспределителей или прибора безопасности (ограничителя грузоподъемности) происходит дальнейшая перегрузка крана, его повреждение или опрокидывание. Конструкция существующих кранов обеспечивает возможность компенсации последствий отказа блокировки опускания стрелы путем автоматического включения, например, втягивания стрелы или опускания груза. Однако в известных приборах безопасности эта возможность не используется, что приводит к снижению надежности защиты крана.
Недостатком известного устройства является также подключение каждого датчика к электронному блоку отдельным жгутом, что приводит к наличию большого количества электрических жгутов на кране и соответственно снижает надежность устройства.
Сущность предложенного способа защиты грузоподъемного крана и устройства для его осуществления заключается в том, что при возникновении опасных режимов работы крана (при перегрузке крана по грузовому моменту, при выходе грузоподъемного оборудования из заданной предельно допустимой зоны по координатной защите и т.д.) формирование сигналов управления механизмами крана не производится. Т.е. эти сигналы не блокируются на какой-либо промежуточной стадии, а не формируются изначально.
Кроме того, в предложенном способе и реализующем его устройстве реализуется дополнительный контур защиты крана за счет компенсации опасных перемещений механизмов крана путем автоматического включения движения других механизмов, обеспечивающих перевод крана в область безопасной работы.
В предложенном способе защиты грузоподъемного крана от перегрузки и повреждения, заключающемся в том, что осуществляют вычисление грузового момента и сравнение его с предельно допустимым, задание зоны допустимых положений грузоподъемного стрелового оборудования, определение фактического положения этого оборудования и сравнение этого положения с зоной допустимых положений, после чего в зависимости от полученных данных разрешают или не разрешают включение гидрораспределителей исполнительных механизмов крана, технический результат - повышение надежности защиты крана, достигается за счет того, что после получения результатов сравнений грузовых моментов и положений грузоподъемного стрелового оборудования осуществляют формирование сигналов разрешения управления исполнительными механизмами крана и их передачу на аппараты управления секций гидрораспределителей, выполненных электрогидравлическими, тех исполнительных механизмов крана, включение которых является безопасным для крана, после чего в зависимости от наличия такого сигнала разрешения и управляющих воздействий крановщика осуществляют включение этих исполнительных механизмов, причем сигналы разрешения формируют в закодированном виде с использованием адреса, а для передачи этих сигналов используют мультиплексную линию связи.
Кроме того, повышение надежности защиты крана достигается тем, что в аварийных ситуациях, при отказе электрогидравлических распределителей, в случае дальнейшего опускания стрелы и увеличения перегрузки крана, независимо от оператора по мультиплексной линии связи на аппараты управления передаются сигналы принудительного включения секций всех электрогидравлических распределителей, которые обеспечивают уменьшение грузового момента.
В устройстве для осуществления предложенного способа защиты грузоподъемного крана от перегрузки и повреждения, содержащем электронный блок, в котором хранятся данные о допустимых режимах нагружения и зоне допустимого положения грузоподъемного стрелового оборудования, и имеющем элементы индикации и органы управления, а также датчик угла наклона стрелы, датчик азимута и датчики определения усилия, данные которых сравниваются с заданными параметрами в электронном блоке, технический результат достигается за счет того, что устройство дополнительно снабжается мультиплексной линией связи, передаваемой сигналы в закодированном виде с использованием соответствующего адреса, причем к мультиплексной линии связи параллельно подключаются снабженные схемами согласования с этой линией упомянутые датчики и аппараты управления электрогидравлическими распределителями исполнительных механизмов крана.
Для достижения поставленной цели устройство может дополнительно содержать датчик длины стрелы, подключенный к мультиплексной линии связи.
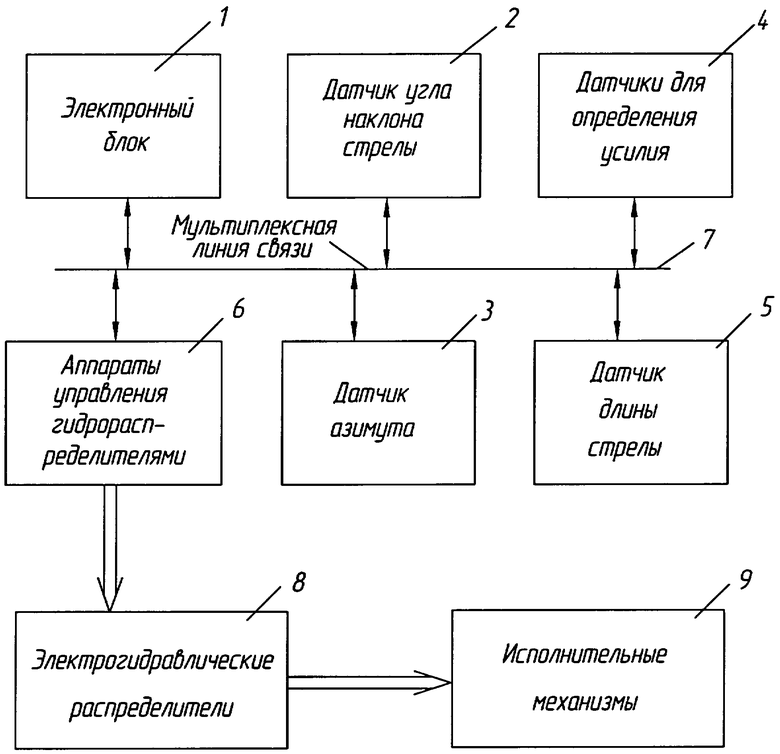
На чертеже приведена функциональная схема предложенного устройства.
Устройство защиты грузоподъемного крана от перегрузки, повреждения и опрокидывания содержит электронный блок 1 с элементами индикации и органами управления, датчик угла наклона стрелы 2, датчик азимута 3, датчики (датчик) для определения усилия (преобразователи давления) 4, датчик длины стрелы 5 (только для кранов с телескопической стрелой) и аппараты управления 6 электрогидравлическими распределителями крана, подключенные к общей мультиплексной линии связи 7. Аппараты управления 6 подключены к электрогидравлическим распределителям 8 исполнительных механизмов крана 9.
Электронный блок 1 может быть выполнен на основе микроконтроллера фирмы Atmel, блока памяти на микросхемах серии АТ24, подключенных непосредственно к микроконтроллеру, и жидкокристаллического индикатора.
В качестве датчиков азимута 3 и датчика длины стрелы 5 могут быть использованы потенциометры, связанные через аналого-цифровые преобразователи с контроллером последовательного интерфейса.
Датчик угла наклона стрелы 2 может быть выполнен на основе акселерометра и контроллера последовательного интерфейса.
Датчики для определения усилия (преобразователи давления) 4 могут быть выполнены в виде тензометрических мостов, установленных в штоковой и поршневой полостях гидроцилиндра подъема стрелы и подключенных к контроллерам последовательного интерфейса.
Аппараты управления 6 в общем случае содержат рукоятку управления, связанную с потенциометрическими или индукционными датчиками угла ее отклонения и силовыми регуляторами тока электромагнитов секционных гидрораспределителей 8, связанными с этими датчиками через микроконтроллер, имеющий встроенный последовательный интерфейс и обеспечивающий согласование с мультиплексной линией связи 7.
Число аппаратов управления 6 и соответственно число секций электрогидравлических распределителей 8 определяется конструкцией крана. В частности, на кране может быть установлено 2 аппарата и 8 секций электрогидравлических распределителей, предназначенных для управления поворотом крана, телескопированием стрелы (два направления перемещения рукоятки 1-го аппарата управления 6), подъемом/опусканием стрелы и управления лебедкой (два направления 2-го аппарата управления 6).
В предложенное устройство с целью реализации дополнительных функций и его приведения с соответствие с дополнительными требованиями Правил ПБ 10-382-00 Госгортехнадзора России могут быть введены дополнительные датчики и блоки, в частности датчик предельного подъема крюка, датчик последнего витка каната лебедки, датчики положения опор, датчик высокого напряжения и т.д. Эти датчики подключаются аналогично указанным и их наличие не влияет на техническую сущность предложенного технического решения.
Поясним суть предложенного способа на примере описания работы реализующего его устройства.
Электронный микропроцессорный блок 1 работает по записанной в его памяти программе и осуществляет обмен с датчиками 2, 3, 4 и 5 по общей мультиплексной линии связи 7. После получения информации от датчиков электронный блок 1 определяет текущую нагрузку крана и положение его грузоподъемного (стрелового) оборудования. Допустимые режимы нагружения в виде грузовых характеристик крана хранятся в памяти электронного блока 1. Зона допустимых значений положения грузоподъемного стрелового оборудования крана вводится при задании параметров координатной защиты при помощи органов управления, расположенных на электронном блоке 1, и сохраняется в его памяти. Электронный блок 1 осуществляет сравнение фактического нагружения крана с предельно допустимым, а также сравнение фактического положения грузоподъемного оборудования с зоной допустимых положений, заданных при введении координатной защиты. Далее электронный блок 1 в зависимости от результатов указанных сравнений по общей мультиплексной линии связи 7 передает на аппараты управления 6 сигналы разрешения включения тех секций электрогидравлических распределителей 8, включение которых безопасно для крана. Одновременно электронный блок 1 отображает на индикаторах основные режимы работы крана (степень загрузки по грузовому моменту, величину вылета, высоту оголовка стрелы и т.д.). Крановщик, воздействуя на рукоятки аппаратов управления 6, формирует необходимые сигналы электрогидравлическими распределителями 8 и соответственно исполнительными механизмами крана 9.
Если, например, кран работает с малой нагрузкой, то электронный блок 1 передает в аппараты управления 6 сигналы разрешения подъема груза и опускания стрелы. В этом случая воздействие крановщика на аппараты управления приводят к формированию сигналов управления гидрораспределителей привода лебедки (подъема груза) и гидрораспределителей привода опускания стрелы.
Если же нагрузка крана по грузовому моменту равна предельно допустимой, то электронный блок 1 не передает в аппараты управления 6 сигналы разрешения включения указанных гидрораспределителей. Поэтому воздействие крановщика на рукоятки аппаратов управления 6 не приводит к формированию сигналов управления электрогидравлическими распределителями 8 и соответственно не может привести к подъему груза или опусканию стрелы (т.е. к увеличению грузового момента). Сигналы управления механизмами крана формируются только после того, когда электронный блок 1 передаст подтверждение возможности формирования этих сигналов (подтверждение допустимости управления соответствующими механизмами крана).
Сигналы по мультиплексной линии связи 7 передаются в закодированном виде по установленному протоколу с использованием адреса блока, датчика и аппарата управления. При этом случайная передача на аппараты управления 6 сигналов разрешения включения какого-либо электрогидравлического механизма (привода) крана исключена. Поэтому отказ электронного блока или любого датчика автоматически приводит к отключению сигналов разрешения работы аппаратов управления 6 и соответственно к невозможности формирования опасных для крана сигналов управления. Благодаря этому и достигается необходимый технический результат.
Если произошла перегрузка крана по грузовому моменту и по непредвиденным причинам продолжается движение механизмов крана в опасной зоне, в частности, вследствие отказа гидрораспределителей (например, при заклинивании золотников), то в предложенном техническом решении осуществляется автоматическое включение механизмов крана, обеспечивающих его переход в безопасную область работы.
Например, при опускании стрелы происходит увеличение вылета и соответственно грузового (опрокидывающего) момента крана. Поэтому опускание стрелы до определенного (предельного) значения приводит к перегрузке крана. В этом случае электронный блок 1 с учетом сравнения текущего значения грузового момента с предельно допустимым не передает по общей мультиплексной линии связи 7 на аппараты управления 6 сигналов разрешения включения секций электрогидравлических распределителей 8 опускания стрелы. Соответственно происходит отключение электрогидравлических распределителей опускания стрелы независимо от воздействий оператора на рукоятки аппаратов управления 6. Благодаря этому и осуществляется защита крана от перегрузки и опрокидывания.
Однако в аварийных ситуациях, например при отказе электрогидравлических распределителей 8, происходит дальнейшее опускание стрелы и увеличение перегрузки крана. В этих ситуациях в предложенных способе и устройстве реализуется дополнительная защита крана - происходит автоматическое включение других механизмов крана, обеспечивающих снижение его грузового момента.
Электронный блок 1 по изменению выходного сигнала датчика наклона стрелы 2 выявляет продолжающееся движение грузоподъемного оборудования крана в зоне недопустимо больших грузовых моментов и независимо от оператора передает по общей мультиплексной линии связи 7 на аппараты управления 6 сигналы принудительного включения секций всех электрогидравлических распределителей 8, которые обеспечивают уменьшение грузового момента - подъема стрелы, опускания груза лебедкой и втягивания стрелы.
Поэтому отказ механизма опускания стрелы и соответствующее независящее от оператора аварийное увеличение грузового момента автоматически компенсируется включением движения других механизмов 9, обеспечивающих уменьшение грузового момента.
Это обеспечивает надежную защиту крана по грузовому моменту даже в случае отказа отдельных элементов его системы управления.
Кроме того, изменение формы связи между отдельными узлами устройства (электронным блоком, датчиками и т.д.), а именно применение мультиплексной линии связи, позволяет обеспечить последовательное соединение всех узлов и соответственно значительное сокращение линий связи на кране, что обеспечивает повышение надежности устройства и, как следствие, надежности защиты крана.
Источники информации, использованные при составлении заявки
1. Ограничитель предельного груза ОПГ-1. Руководство по эксплуатации ЛГФИ.408844.011 РЭ, г. Арзамас. - 14с.
2. RU 2078021 С1, МПК6 В 66 С 23/88, 13/18, 27.04.1997.
3. RU 2129524 C1, МПК6 В 66 С 23/00, 27.04.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2237006C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОВОЙ УСТОЙЧИВОСТЬЮ МОБИЛЬНОГО ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349536C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2321534C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| СИСТЕМА БЕЗОПАСНОСТИ КРАНА СТРЕЛОВОГО ТИПА | 2006 |
|
RU2314248C1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2268232C2 |
Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок и повреждения стреловых грузоподъемных кранов с телескопической стрелой. Способ защиты грузоподъемного крана от перегрузки и повреждения заключается в том, что осуществляют вычисление грузового момента и сравнение его с предельно допустимым, задание зоны допустимых положений грузоподъемного стрелового оборудования, определение фактического положения этого оборудования и сравнение этого положения с зоной допустимых положений, после чего в зависимости от полученных данных разрешают или не разрешают включение гидрораспределителей исполнительных механизмов крана. После получения результатов сравнений грузовых моментов и положений грузоподъемного стрелового оборудования осуществляют формирование сигналов разрешения управления исполнительными механизмами крана и их передачу на аппараты управления секций гидрораспределителей, выполненных электрогидравлическими, тех исполнительных механизмов крана, включение которых является безопасным для крана, после чего осуществляют включение этих исполнительных механизмов. Устройство защиты грузоподъемного крана от перегрузки и повреждения содержит электронный блок, в котором хранятся данные о допустимых режимах нагружения и зоне допустимого положения грузоподъемного стрелового оборудования, имеющий элементы индикации и органы управления, а также датчик угла наклона стрелы, датчик азимута и датчики определения усилия, данные которых сравниваются с заданными параметрами в электронном блоке. Устройство снабжено мультиплексной линией связи, передающей сигналы в закодированном виде с использованием соответствующего адреса, причем к мультиплексной линии связи параллельно подключены снабженные схемами согласования с этой линией упомянутые датчики и аппараты управления электрогидравлическими распределителями исполнительных механизмов крана. Изобретение обеспечивает повышение надежности защиты крана от перегрузки и повреждения. 2 н. и 2 з. п. ф-лы, 1 ил.
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2078021C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |
| УСТРОЙСТВО ДЛЯ МУЛЬТИПЛЕКСНОГО ОБМЕНА ИНФОРМАЦИЕЙ | 1991 |
|
RU2012045C1 |

