Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано в системах защиты и управления передвижных грузоподъемных кранов и кранов с перемещаемым оборудованием.
Грузоподъемные краны согласно требованиям промышленной безопасности оборудуются приборами, устройствами и системами безопасности для ограничения их рабочих движений, ограничения грузоподъемности или грузового момента, для предотвращения столкновений с препятствиями при работе в стесненных условиях (координатной защитой) и т.д.
Известна система безопасности грузоподъемного крана, содержащая цифровой вычислительный блок, к информационным входам которого подключены датчики параметров работы крана, включая датчик перемещения крана, соединенный с его ходовым колесом, блок визуальной индикации, блок предупредительной сигнализации и исполнительный блок, а также внешнее запоминающее устройство, соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных. Эта система снабжена концевым выключателем, с использованием которого осуществляется корректировка показаний датчика положения грузоподъемного крана на подкрановом пути при его нахождении на нулевой отметке [1].
Реализация этой корректировки с обязательным перемещением крана на нулевую отметку подкранового пути до срабатывания концевого выключателя приводит к непроизводительным затратам времени и, соответственно, к снижению производительности работы крана. Кроме того, вследствие проскальзывания ходового колеса крана, с которым соединен датчик перемещения, «уход» показаний датчика в течение рабочей смены может превысить предельно допустимую величину, что приведет к неправильной работе координатной защиты крана и к снижению безопасности его работы.
Наиболее близкой к предложенной является система безопасности грузоподъемного крана с перемещаемым крановым оборудованием, содержащая цифровой вычислительный блок, к информационным входам которого подключены мультиплексным каналом обмена данных выходы датчиков параметров крана, включающих, по меньшей мере, один датчик перемещения оборудования крана, а к выходам - регистратор параметров крана с таймером реального времени, блок визуальной индикации, блок предупредительной сигнализации и исполнительный блок. Эта система снабжена, по меньшей мере, одним сигнализатором пересечения оборудованием крана, по меньшей мере, одной контрольной точки, находящейся в рабочей зоне крана. Координаты каждой точки предварительно занесены во внешнее запоминающее устройство, соединенное с цифровым вычислительным блоком двухсторонним каналом обмена данных. Сигнализатор подключен к дополнительному информационному входу цифрового вычислительного блока, приспособленного для коррекции показаний датчика перемещения оборудования крана по сигналам с указанного сигнализатора [2].
Эта система имеет пониженную надежность. Это обусловлено тем, что ее реализация не предусматривает установку каких-либо дополнительных технических устройств в контрольных точках. Сигнализаторы пересечения оборудованием крана контрольных точек, находящихся в рабочих зонах крана, в этой системе представляют собой лишь контактные или бесконтактные дискретные датчики (емкостные, индуктивные, оптические, ультразвуковые, магниточувствительные и др.)». Исходя из их конструктивного исполнения они могут взаимодействовать, например, с конструктивными элементами подкранового пути, положения которых принимаются за контрольные.
Использование в качестве контрольных точек сторонних элементов, например конструктивных элементов подкранового пути, специально не предназначенных для взаимодействия с сигнализаторами, приводит к снижению надежности формирования сигналов положения кранового оборудования и, соответственно, надежности работы системы в целом. В свою очередь это приводит к снижению эффективности работы координатной защиты крана.
Коррекция показаний датчика перемещений в этой системе осуществляется лишь при пересечении оборудованием крана контрольных точек, т.е. эти точки могут располагаться лишь в середине рабочего пути перемещения кранового оборудования. Это снижает область применения данной системы в виду ее неприменимости в тех случаях, когда контрольные точки расположены лишь в конечных положениях рабочего пути, например на тупиковых упорах.
Кроме того, известная система согласно приведенному в его формуле родовому понятию «система безопасности грузоподъемного крана с перемещаемым крановым оборудованием» предусматривает ее функционирование лишь с перемещаемым оборудованием крана, но не крана в целом. Соответственно, известная система не предусматривает, например, реализацию координатной защиты башенного крана при его передвижении по подкрановому пути, поскольку в этом случае происходит перемещение не отдельных крановых механизмов, а крана в целом. Это также приводит к снижению области применения известной системы безопасности.
Техническими результатами, на достижение которых направлено изобретение, являются:
- повышение эффективности работы координатной защиты крана;
- повышение надежности системы безопасности грузоподъемного крана за счет установки дополнительных технических средств в контрольных точках для определения положения крана в целом или его отдельных механизмов;
- расширение области применения системы безопасности за счет обеспечения контроля не только пересекаемых, но и конечных положений кранового оборудования с заранее известными координатами, а также контроля положений не только крановых механизмов, но и крана в целом.
В системе безопасности грузоподъемного крана, содержащей цифровой блок, к информационным входам которого подключены датчики параметров крана, включающие, по меньшей мере, один датчик перемещения, исполнительный блок, подключенный к выходам цифрового блока, и, по меньшей мере, один сигнализатор, выполненный с возможностью формирования сигналов в зависимости от его текущего пространственного положения относительно контрольного положения и подключенный к цифровому блоку, который приспособлен для коррекции показаний датчика перемещения по сигналам с указанного сигнализатора с использованием координат контрольного положения, записанных в цифровом блоке, указанные технические результаты достигаются тем, что эта система дополнительно оснащена, по меньшей мере, одним устройством, установленным в контрольном положении в рабочей зоне перемещения крана и/или кранового оборудования и выполненным в виде активного или пассивного транспондера, или металлического флажка, или стойки, или иного металлического устройства с возможностью его взаимодействия с сигнализатором. При этом сигнализатор может быть выполнен, в частности, в виде устройства считывания информации с транспондера, или контактного устройства, или бесконтактного высокочастотного, или емкостного, или индуктивного, или индукционного, или ультразвукового, или магниточувствительного устройства.
В предложенной системе безопасности используется установка в рабочей зоне с известными координатами устройств, реализованных из условия их надежного обнаружения сигнализатором. Реализуется коррекция показаний датчика положения не только в середине рабочей зоны, но и на ее границах. Реализация этих признаков изобретения обеспечивает достижение указанных технических результатов.
На чертеже изображена функциональная схема системы безопасности. Система безопасности содержит цифровой блок 1, реализованный преимущественно на микроконтроллере 2 и включающий в себя запоминающее устройство 3, регистратор параметров крана с часами реального времени 4, блок визуальной индикации 5, блок предупредительной сигнализации 6, исполнительный блок 7, датчики параметров крана 8, включающие, в частности, датчик нагрузки 9, прочие датчики (угла азимута, угла наклона стрелы, приближения к линии электропередач и т.д.) 10, по меньшей мере, один датчик перемещения 11 (например, датчик перемещения крана по подкрановому пути, датчик перемещения грузовой тележки (каретки) по направляющим поясам стрелы крана и т.д.) и, по меньшей мере, один сигнализатор 12, взаимодействующий с каким-либо устройством 13, расположенным в рабочих зонах крана с известными координатами, записанными в запоминающее устройство 3.
Микроконтроллер 2 цифрового блока 1 кроме запоминающего устройства 3, предназначенного для хранения данных и программы работы микроконтроллера, содержит, в частности, процессор, тактовый генератор и периферийные устройства.
Цифровой блок 1 содержит устройства согласования с датчиками параметров крана 8, встроенные в микроконтроллер 2 или подключенные к нему (на чертеже условно не показаны). Этот блок может именоваться контроллером, блоком обработки данных, блоком индикации, информационно-управляющим или информационно-вычислительным блоком и т.д., что не имеет принципиального значения.
Подключение датчиков параметров крана 8 и сигнализатора 12 к цифровому блоку 1 может осуществляться посредством мультиплексного канала обмена данными (CAN, LIN и т.п.) или с использованием отдельных проводов.
Регистратор параметров крана с часами реального времени 4, блок визуальной индикации 5, блок предупредительной сигнализации 6 и при необходимости другие функциональные блоки системы безопасности выполнены в виде отдельных устройств или входят в состав цифрового блока 1. Регистратор параметров крана с часами реального времени 4 может входить в состав микроконтроллера 3.
Исполнительный (выходной) блок 7 в зависимости от конструктивного исполнения исполнительных приводов грузоподъемного крана выполнен в виде усилителей мощности, электрогидравлических распределителей и т.п. Он может содержать микроконтроллер и средства для подключения к цифровому блоку 1 посредством мультиплексного канала обмена данными.
Датчики параметров работы крана 8, которые могут именоваться периферийными устройствами регистрации, периферийными контроллерами, измерительными устройствами и т.д., размещены в различных зонах крана и включают в себя аналоговые датчики с аналого-цифровыми преобразователями и цифровые датчики. Аналоговые датчики измеряют плавно изменяющиеся параметры работы крана и используют для измерения чувствительные элементы с пропорциональным выходным сигналом. Цифровые датчики измеряют дискретные параметры работы крана.
Сигнализаторы 12 пересечения или достижения оборудованием крана или краном в целом контрольных положений, находящихся в пределах рабочих зон их перемещений, представляют собой контактные или бесконтактные высокочастотные, емкостные, индуктивные, оптические, ультразвуковые, магниточувствительные датчики или устройства.
Эти сигнализаторы могут быть выполнены с использованием технологии RFID (Radiofrequenzidentifikation - радиочастотной идентификации) в виде считывающих устройств транспондеров, генерирующих электромагнитное поле, которое активирует транспондеры, и считывающих ответные сигналы транспондеров. В этом случае устройства 13, установленные в контрольных положениях, выполняются виде активных (с автономным источником питания) или пассивных транспондеров. Транспондер (передатчик-ответчик) - это приемопередающее устройство, посылающее заранее заданное сообщение в ответ на принятый сигнал от активирующего его считывающего устройства-сигнализатора 12.
В качестве устройств 13, установленных в контрольных положениях, могут быть использованы также флажки, стойки и другие металлические устройства (предметы). В этом случае используется индукционный (индуктивный) сигнализатор 12 или сигнализатор, выполненный с использованием датчика Холла.
Выбор контрольных положений, в которых устанавливаются устройства 13, осуществляется исходя из того, что грузоподъемный кран или его оборудование, например грузовая тележка (каретка), во время своей работы максимальное количество раз пересекают это положение или приближаются к нему.
Вместо специальных устройств, установленных в контрольных положениях, могут использоваться конструктивные элементы подкранового пути - подрельсовые опорные элементы, стыки рельсов, стыковые крепления рельсов, фиксирующие элементы рельсового пути в поперечном направлении (стяжки-распорки) или тупиковые упоры, положения которых принимаются за контрольные.
Возможно также расположение сигнализатора 12 на грузоподъемном кране в определенных контрольных положениях из условия обеспечения возможности его взаимодействия с перемещающимся крановым оборудованием. Примером этого является размещение сигнализатора на стреле грузоподъемного крана с возможностью его взаимодействия с грузовой тележкой (кареткой) при ее перемещении по направляющим поясам стрелы.
Для коррекции выходных сигналов каждого датчика положения 11 может использоваться несколько контрольных положений на пути перемещения соответствующего кранового оборудования (механизма) или крана в целом. В этом случае дополнительно применяются средства идентификации устройств, расположенных в этих контрольных положениях. В частности, используются транспондеры, формирующие различные ответные сигналы. Это позволяет неоднократно корректировать показания датчиков перемещения 11 и тем самым повысить точность их работы.
Система работает следующим образом.
При работе грузоподъемного крана датчики 8 осуществляют измерение параметров, характеризующих загрузку крана (посредством датчика нагрузки 9) и положение его грузоподъемного оборудования. Значения рабочих параметров крана от датчиков 8 передаются в цифровой блок 1, который, работая по программе, определенной при проектировании системы безопасности и предварительно записанной в запоминающее устройство 3 микроконтроллера 2, осуществляет сравнение фактического нагружения крана с предельно допустимым, а также сравнение фактического положения грузоподъемного оборудования с зоной его допустимых положений. В зависимости от результатов этих сравнений цифровой блок 1 выдает на исполнительный блок 7 сигнал на разрешение или запрещение отдельных видов движений крана. Одновременно при помощи блока визуальной индикации 5 и блока предупредительной сигнализации 6 для крановщика формируются необходимые информационные и предупреждающие сигналы.
При достижении краном или его оборудованием, например грузовой тележкой (кареткой), контрольного положения на подкрановом пути или на направляющих поясах стрелы, координаты которых предварительно занесены в запоминающее устройство 3, с сигнализатора 12 в цифровой блок 1 поступает сигнал о нахождении крана или его оборудования в контрольной положении. Микроконтроллер 2 цифрового блока 1 производит корректировку показаний датчика 11 перемещения, соответствующего данному сигнализатору. Это позволяет исключить погрешности датчиков перемещения, вызванные проскальзыванием ходовых колес крана, растяжением канатов и другими причинами.
Все виды и направления движений крана из микроконтроллера 2 цифрового блока 1 передаются в регистратор параметров 4 и записываются в нем в режиме реального времени для последующего контроля и анализа работы крана, что позволяет своевременно проводить регламентные работы.
В цифровом блоке 1 может определяться приближение крана и его оборудования к какому-либо граничному положению с отображением информации об этом в блоке визуальной индикации 5 и с выдачей блоком 6 предупредительных сигналов для предупреждения крановщика об опасном приближении к граничным значениям параметров крана, например о приближении к концу или началу пути, к максимальным и минимальным значениям высоты, вылета и поворота и т.д. Это обеспечивает дополнительное повышение эффективности работы координатной защиты и безопасности работы крана.
Изобретение допускает также иные варианты реализации системы безопасности грузоподъемного крана, содержащей признаки, изложенные в его формуле.
Источники информации
1. Ограничитель нагрузки башенного крана ОНК-160Б. Руководство по эксплуатации. ЛГФИ. 408844. 025-01РЭ, ОАО Арзамасский приборостроительный завод, с.1-19, 48-49.
2. RU 233382 C1, B66C 15/00, B66C 23/88, B66C 13/8, 20.09.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ПЕРЕМЕЩАЕМЫМ КРАНОВЫМ ОБОРУДОВАНИЕМ | 2007 |
|
RU2333882C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО КРАНА НА КРАНОВОМ ПУТИ | 2005 |
|
RU2281241C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2269483C2 |
Изобретение относится к системам безопасности и управления передвижных грузоподъемных кранов и кранов с перемещаемым оборудованием. Система безопасности содержит цифровой блок, к информационным входам которого подключены датчики параметров крана, включающие, по меньшей мере, один датчик перемещения, исполнительный блок, подключенный к выходам цифрового блока и, по меньшей мере, один сигнализатор. Сигнализатор подключен к цифровому блоку и выполнен с возможностью формирования сигналов в зависимости от его текущего пространственного положения относительно контрольного положения, а цифровой блок приспособлен для коррекции показаний датчика перемещения по сигналам с сигнализатора с использованием координат контрольного положения, записанных в цифровом блоке. Система безопасности дополнительно оснащена, по меньшей мере, одним устройством, установленным в контрольном положении в рабочей зоне перемещения крана и/или кранового оборудован и выполненным в виде активного или пассивного транспондера, или металлического флажка, или стойки, или иного металлического устройства с возможностью его взаимодействия с сигнализатором. Достигается упрощение технического обслуживания крана с системой безопасности, а также расширение области применения системы безопасности за счет контроля положений не только крановых механизмов, но и крана в целом. 1 з.п. ф-лы, 1 ил.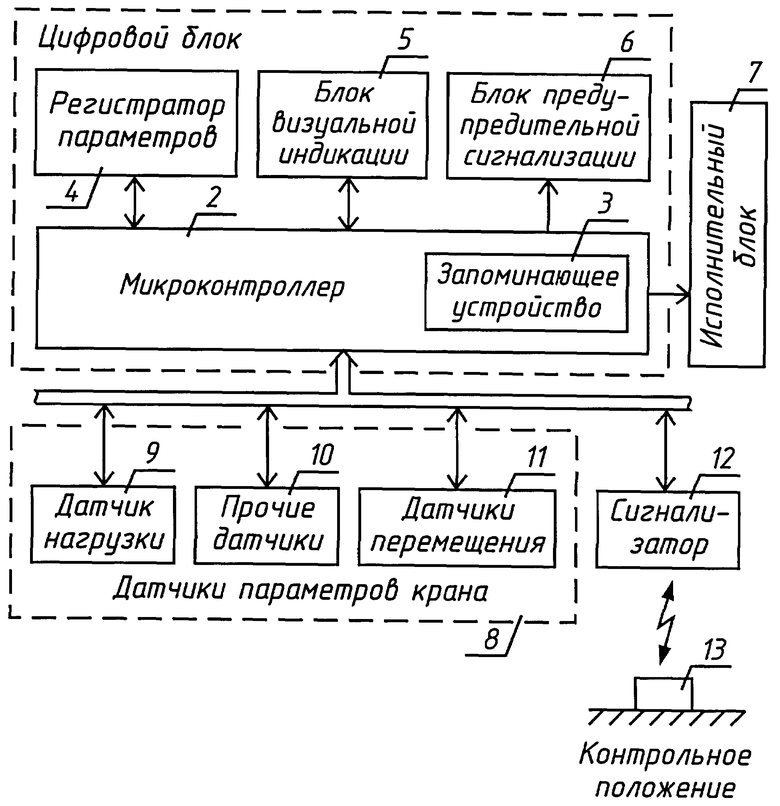
1. Система безопасности грузоподъемного крана, содержащая цифровой блок, к информационным входам которого подключены датчики параметров крана, включающие, по меньшей мере, один датчик перемещения, исполнительный блок, подключенный к выходам цифрового блока, и, по меньшей мере, один сигнализатор, выполненный с возможностью формирования сигналов в зависимости от его текущего пространственного положения относительно контрольного положения и подключенный к цифровому блоку, который приспособлен для коррекции показаний датчика перемещения по сигналам с указанного сигнализатора с использованием координат контрольного положения, записанных в цифровом блоке, отличающаяся тем, что она дополнительно оснащена, по меньшей мере, одним устройством, установленным в контрольном положении в рабочей зоне перемещения крана и/или кранового оборудования и выполненным в виде активного или пассивного транспондера или металлического флажка, или стойки, или иного металлического устройства с возможностью его взаимодействия с сигнализатором.
2. Система по п.1, отличающаяся тем, что сигнализатор выполнен в виде устройства считывания информации с транспондера или контактного устройства, или бесконтактного высокочастотного, или емкостного, или индуктивного, или индукционного, или ультразвукового, или магниточувствительного устройства.
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ПЕРЕМЕЩАЕМЫМ КРАНОВЫМ ОБОРУДОВАНИЕМ | 2007 |
|
RU2333882C1 |
| US 5730305 A, 24.03.1998 | |||
| УСТРОЙСТВО КОДИРОВАНИЯ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ПАССИВНОГО ТРАНСПОНДЕРА | 2004 |
|
RU2270517C1 |
| Способ выявления годичных слоев у древесины лиственных пород | 1939 |
|
SU56887A1 |

