Изобретение относится к области механики, микросистемной техники и наномеханики, в частности к технике устройств на основе материалов с эффектом памяти формы, и может найти применение в радиоэлектронике, машиностроении, нанотехнологии, электронной микроскопии, медицине.
Известен аналог предлагаемого технического решения - термобиметаллический актюатор (биметаллическая пластина) [1], включающий термочувствительный элемент в форме пластины, выполненной из двух тонких слоев упругих металлов с различными коэффициентами теплового расширения, прочно соединенных друг с другом плоской стороной. При подогреве биметаллической пластины (от внешнего источника или Джоулевым теплом при пропускании через нее электрического тока) различие в коэффициентах расширения двух слоев пластинки приведет к относительному растяжению пластинки с одной стороны и сжатию - с другой. В результате - пластина изогнется. Эффект изгиба используют для совершения полезной работы: замыкания и размыкания электрических контактов, срабатывания защелки, перекрытия крана магистрали жидкости или газа и т.д.
Недостатком аналога является низкая эффективность, обусловленная малыми изгибными деформациями и соответственно малый максимальный прогиб свободного торца пластинки. Это приводит к невозможности выполнить подобное устройство достаточно малого размера при заданном необходимом прогибе.
Известен также аналог предлагаемого технического решения - актюатор (исполнительный элемент) и способ его изготовления [2], включающий термочувствительный элемент, выполненный из сплава с эффектом памяти формы, управляемым при помощи источника теплового поля, способного вызвать термоупругое мартенситное превращение в сплаве, имеющий предпочтительно двумерную форму, например, в виде пластины, ленты, пленки, фольги или оболочки. Способ его изготовления заключается в том, что сплаву с эффектом памяти формы придают предпочтительно двумерную форму, например, в виде, пластины, ленты, пленки, фольги или оболочки, а затем тренируют, оказывая на него механическую нагрузку в процессе термоциклирования через температурный интервал термоупругого мартенситного превращения до достижения возвратимой деформации (например, изгибной), обусловленной одно- или двухсторонним эффектами памяти формы.
Недостатком аналога является низкая эффективность и низкая технологичность, обусловленная тем, что при одностороннем эффекте памяти формы периодическое воздействие теплового поля и обратимый мартенситный переход вызывают только однократное изменение формы исполнительного элемента и для повторной деформации необходимо повторить операцию тренировки на одностороннюю память формы, то есть операцию деформирования элемента в мартенситном состоянии или при охлаждении через переход аустенит - мартенсит. Периодическое изменение формы при периодическом воздействии теплового поля возможно в аналоге после тренировки на двустороннюю память формы. Однако эффект двухсторонней памяти формы приводит к сравнительно меньшей деформации (обычно на порядок меньше, чем при эффекте односторонней памяти формы), кроме того, операция тренировки на двустороннюю память формы сложна, поскольку сводится к многократному термоциклированию под нагрузкой, что, в свою очередь, нетехнологично, затрудняет автоматизацию производства актюаторов, повышает общую стоимость исполнительного элемента.
Известен также патент [3], в котором описан аналог предлагаемого технического решения. Термочувствительный исполнительный элемент аналога выполнен в виде пластины из ферромагнитного сплава с памятью формы Ni-Mn-Fe-Ga, обладающего тем свойством, что в нем термоупругое мартенситное превращение может быть вызвано изменением внешнего магнитного поля. В процессе изготовления исполнительного элемента его выполняют в форме пластины, а затем тренируют до достижения одно- или двустороннего эффекта памяти формы.
Ему присущи все указанные для второго аналога недостатки, хотя для его работы используется изменение магнитного поля, а не теплового.
Известен также аналог предлагаемого технического решения, патент [4], в котором описан актюатор и способ его изготовления, включающий термочувствительный элемент, выполненный в виде двухслойной пластины, причем один из слоев изготовлен из сплава с эффектом памяти формы, а другой - из упругого металла. В процессе его изготовления до операции соединения слоев, слой с эффектом памяти предварительно псевдопластически деформируют, а операцию соединения слоев производят при температуре ниже температуры перехода аустенит - мартенсит сплава с эффектом памяти формы. Такой способ изготовления актюатора позволяет получить значительно большие относительные деформации, чем у традиционных биметаллических пластин и актюаторов с двусторонним эффектом памяти формы, а также избежать нетехнологичной операции тренировки на двустороннюю память формы. К его недостаткам можно отнести сложность реализации при малых размерах, необходимых для создания микро- и наномеханических устройств, а также связанные с этим ограничения функциональных возможностей и низкое быстродействие.
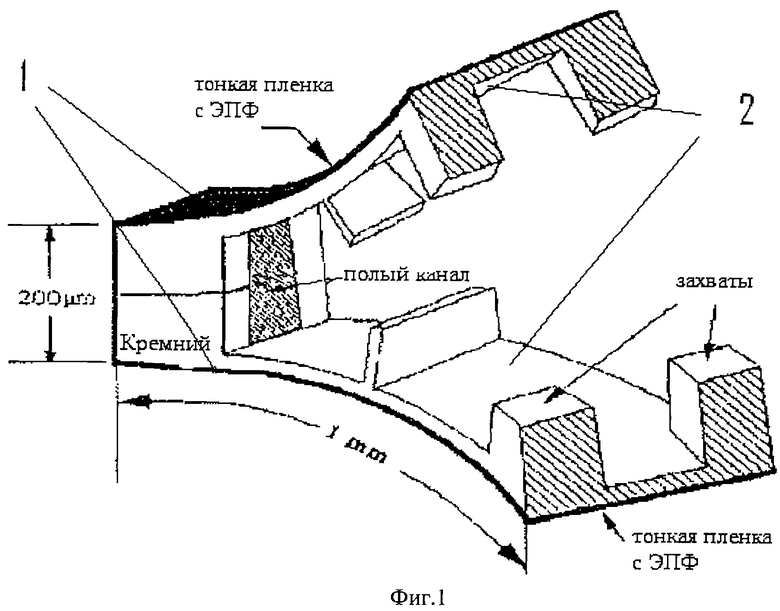
Прототипом предлагаемого технического решения является микромеханическое устройство для захвата микрообъектов (микропинцет), способ его изготовления и система для манипулирования микро- и нанообъектами на его основе [5]. Микромеханическое устройство согласно прототипу выполнено в виде двух плоских элементов, из которых, по крайней мере один выполнен двухслойным и термочувствительным и состоит из двух слоев материалов, из которых один изготовлен в виде сплава с эффектом памяти формы (из сплава Ti-Ni-Cu), а другой - упругий (из кремния), причем плоские элементы прочно соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования. Вся конструкция укреплена на конце микропроволоки со стороны соединения элементов, для удобства приближения к захватываемому объекту. Для достижения раскрывания пинцета при нагреве слой с памятью формы расположен с внешней стороны микропинцета. Микропинцет приводится в действие нагревом всей конструкции от внешнего источника, до температуры мартенситного фазового структурного превращения сплава с эффектом памяти формы, который переводит слой материала с эффектом памяти формы из мартенситного состояния, в котором он находится при комнатной температуре, в аустенитное. Раскрывание микропинцета при нагреве происходит вследствие того, что способ изготовления этого микромеханического устройства предполагает проведение операции магнетронного напыления слоя с эффектом памяти формы (сплав Ti-Ni-Cu) на упругий слой (кремний) при температуре около 500 С. В результате, при охлаждении, в контакте двух слов: слоя с эффектом памяти формы и упругого (кремний - Ti-Ni-Cu) возникают механические напряжения, которые релаксируют при охлаждении элемента до температуры перехода аустенит - мартенсит (около 40°С) и двухслойный термочувствительный элемент является прямолинейным при комнатной температуре. Нагрев элемента выше точки перехода мартенсит - аустенит приводит к фазовому мартенситному переходу, который переводит слой с памятью формы в аустенитное состояние и в нем возникают механические напряжения, которые изгибают двухслойный элемент, в результате чего микропинцет раскрывается, а при повторном охлаждении он опять закрывается, и так многократно.
Недостатком данного прототипа является низкая эффективность, обусловленная невысокой достигаемой изгибной деформации исполнительно элемента, приводящая к тому, что данное микромеханическое устройство невозможно изготовить достаточно малым по габаритным размером (порядка микрометров) и, соответственно, с его помощью невозможно манипулировать малыми микро- и нанообъектами. (В работе [5] сообщается, что размер прототипа - 1 мм).
Способ изготовления прототипа характеризуется следующей последовательностью операций:
1) механическая микрообработка (резка) и травление кремния для формирования двух кремниевых консолей (в т.ч. захвата микропинцета, толкательной прокладки и полого канала);
2) механическое выравнивание двух консолей, нанесение на них двухслойной пленки Ti/Au в место соединения и далее соединение с помощью эвтектической пайки при 380°С (3 мин);
3) напыление пленок NiTiCu с эффектом памяти формы последовательно на обе внешние стороны микропинцета (2 процедуры) и отжиг при 500°С;
4) соединение прототипа с внешними электропроводкой и миллиметровым окончанием механического устройства позиционирования.
Система для манипулирования микрообъектами состоит из микропинцета, резистивной системы нагревания, механического устройства позиционирования. Она позволяет захватывать и перемещать микрообъекты, используя визуальный контроль действий посредством оптического микроскопа. Микропинцет соединен с устройством позиционирования при помощи микротрубки и имеет тепловой контакт с резистором нагревания. Захват микрообъекта происходит при пропускании тока через резистор, нагревающего микропинцет до требуемых значений температуры; производится захват микрообъекта, после чего возможно перемещение микропинцета и захваченного объекта устройством позиционирования.
Цель предлагаемого изобретения заключается в повышении эффективности микромеханического устройства за счет уменьшения его минимально возможных габаритов до микронов и менее, расширение его функциональных возможностей за счет достижения манипулирования микро- и нанообектами, достижения возможности деформирования и обработки микро- и нанообъектов, достижения совместимости предлагаемой системы манипулирования микро- и нанообъектами с существующими системами наблюдения, исследования и наноманипулирования такими, как сканирующие электронные и ионные микроскопы, нанопозиционеры и наноманипуляторы, а также повышение быстродействия и наибольшего преодолеваемого противодействующего усилия, а, кроме того, упрощении технологии серийного производства.
Поставленные цели достигаются тем, что в известном микромеханическом устройстве, включающем два плоских элемента, из которых по крайней мере один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из сплава с эффектом памяти с псевдопластической деформацией растяжения, а другой - из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной с внешней стороны устройства на слой сплава, а захват для удержания объекта сформирован в сплаве с памятью формы.
Поставленные цели достигаются также тем, что для достижения сжатия (закрытия) микромеханического при нагреве, упругий слой расположен на поверхности сплава с памятью формы с внешней стороны микромеханического устройства.
Поставленные цели достигаются также тем, что для достижения раскрытия микромеханического устройства при нагреве, упругий слой расположен на поверхности сплава с памятью формы с внутренней стороны микромеханического устройства.
Таким образом, предлагаемое микромеханическое устройство может иметь исполнение в виде и нормально разомкнутой конструкции, которая до нагрева представляет собой раскрытый пинцет и нормально замкнутой конструкции, которая до нагрева представляет нормально сомкнутый зажим, отличие между этими исполнениями состоит в том, что упругий слой наносится с внутренней и внешней стороны на слой сплава с эффектом памяти формы, соответственно.
Поставленные цели достигаются также тем, что в качестве материала с эффектом памяти формы выбран быстрозакаленный сплав Ti2NiCu.
Поставленные цели достигаются также тем, что в качестве материала с эффектом с памятью формы выбран сплав Ni2+X-YMn1-XFeYGa, 0<X<0,2, 0<Y<0,2.
Поставленные цели достигаются также тем, что в качестве материала с эффектом с памятью формы выбран сплав Ni2-X-YMn1-XIn1-Y, 0<X<0,2, 0,3<Y<0,4.
Поставленные цели достигаются также тем, что в качестве упругого элемента выбран слой платины.
Поставленные цели достигаются также тем, что при формировании микромеханического устройства для манипулирования микро- и нанообъектами для осуществления их отрезания и деформирования захвату придается форма треугольной призмы.
Поставленные цели достигаются также тем, что для достижения отрезания объектов манипулирования и деформирования и раскрытия при нагреве (нормально замкнутое микромеханическое устройство) упругий слой расположен с внутренней стороны микромеханического устройства.
Поставленные цели достигаются также тем, что в качестве материала с эффектом памяти формы выбран быстрозакаленный сплав Ti2NiCu.
Поставленные цели достигаются также тем, что в качестве материала с эффектом памяти формы выбран сплав Ni2+X-YMn1-XFeYGa, 0<X<0,2, 0<Y<0,2.
Поставленные цели достигаются также тем, что качестве материала с эффектом памяти формы выбран сплав Ni2-X-YMn1-XIn1-Y, 0<X<0,2, 0,3<Y<0,4.
Поставленные цели достигаются также тем, что в способе изготовления микромеханического устройства, включающем операцию изготовления слоя материала с эффектом памяти формы с псевдопластической деформацией растяжения, изготовление слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, предварительно производят операцию формирования слоя с эффектом памяти формы и внесения в него деформации псевдопластического растяжения, а затем операции создания упругого слоя и соединения слоев для получения термочувствительного элемента, проводят путем напыления на поверхность слоя сплава с эффектом памяти формы слоя упругого материала, а затем формируют захват манипулируемого объекта на слое с эффектом памяти формы, при этом операцию нанесения упругого слоя производят при температуре материала с эффектом памяти формы менее температуры перехода мартенсит - аустенит сплава.
Предлагаемый способ характеризуется следующей последовательностью операций:
1) изготавливают слой с эффектом памяти формы,
2) вносят в него псевдопластическую деформацию растяжения,
3) на него наносят упругий слой в виде металлического слоя, причем операцию нанесения производят ниже точки превращения мартенсит - аустенит,
4) в слое с эффектом памяти формы формируют захваты,
5) к слою с эффектом памяти формы припаивают микропроволоку микропозиционера.
Поставленные цели достигаются также тем, что операции изготовления упругого слоя и операцию соединения слоев производят одновременно методом ионно-стимулированного осаждения металла на поверхность сплава с эффектом памяти формы.
Поставленные цели достигаются также тем, что операции формирования слоя с эффектом памяти формы и формирования рабочей части захвата производится методом селективного ионного травления.
Поставленные цели достигаются также тем, что в системе манипулирования микрообъектами на основе микромеханического устройства, включающей микромеханическое устройство, закрепленное на конце микропроволоки, рабочее поле с манипулируемым объектом и источник подогрева, другой конец микропроволоки укреплен на нанопозиционере, а система подогрева выполнена в виде лазерного источника нагрева, излучение которого сфокусировано на рабочее поле системы манипулирования, включая конец микропроволоки с микропинцетом.
Поставленные цели достигаются также тем, что в лазерный источник выполнен в виде полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования.
Поставленные цели достигаются также тем, что система манипулирования микрообъектами расположена в вакуумной камере сканирующего ионного или электронного микроскопа с возможностью визуального контроля процесса манипулированиря микро- или нанообъекта и управления этим процессом, путем перемещения конца микропроволоки, укрепленной на нанопозиционере и контроля мощности излучения лазерного источника подогрева рабочего поля, путем регулировки тока питания полупроводникового инжекционного лазера.
Новым в предложенном техническом решении, по сравнению с известным, является то, что в элемент с памятью формы, например, быстрозакаленную ленту или пленку, до соединения с упругим элементом предварительно вносят псевдопластическую деформацию растяжения, а операцию создания биметаллического термочувствительного слоя производят, нанося упругий слой на слой с памятью формы, например, методом ионно-стимулированного осаждения, а затем формируют структуру устройства методом травления, например, ионно-селективного, который производят при температуре ниже точки мартенситного перехода, пока слой с памятью формы находится в мартенситном состоянии и «помнит» возвратимую деформацию. В результате этого работоспособность устройства сохраняется вплоть до субмикронного и нанометрового диапазона толщин слов упругого и с эффектом памяти формы. Таким образом, настоящее устройство может реально быть изготовлено описанными методами с габаритными размерами порядка микрометров и окажется способно манипулировать реальными нанообъектами в составе системы манипулирования.
В дальнейшем предлагаемое техническое решение поясняется чертежами.
На фиг.1 представлена схема, поясняющая принцип работы устройства - прототипа, микропинцета, описанного в [5], в конструкции нормально замкнутого микропинцета; 1 - слой с эффектом памяти формы, 2 - упругий слой, в прототипе выполнен из кремния.
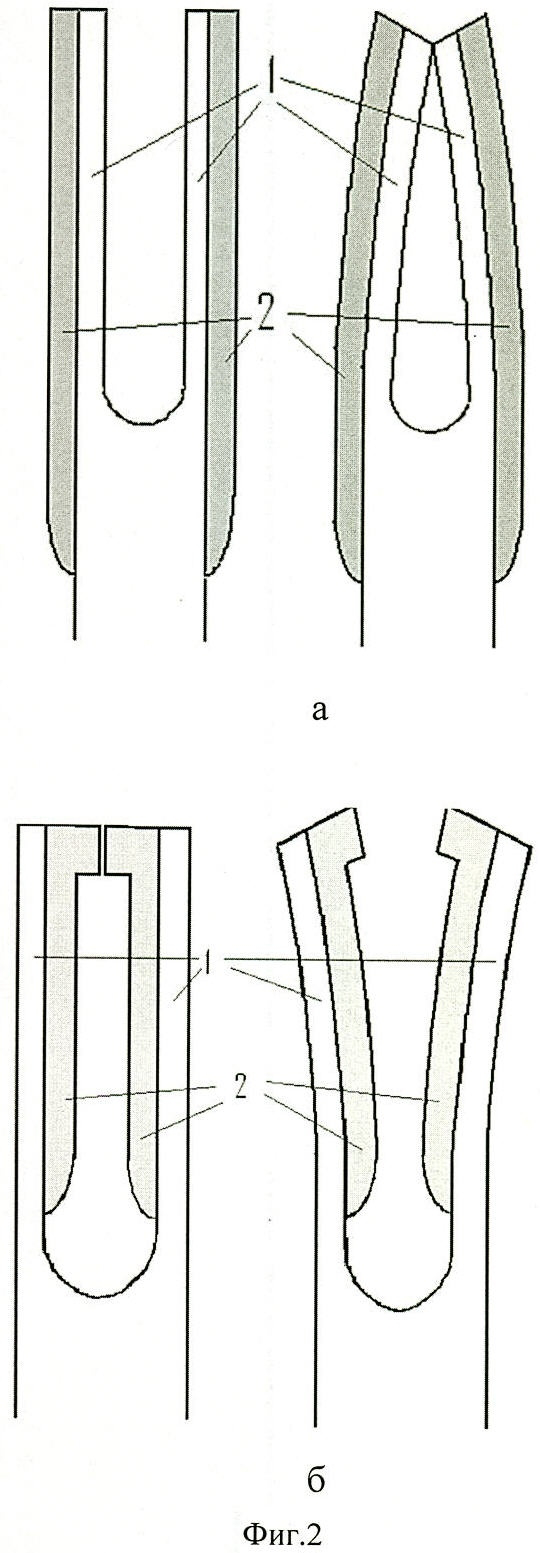
На фиг.2 представлена схема, поясняющая конструкцию предлагаемого устройства в конструкции нормально разомкнутого пинцета (а) и нормально замкнутого пинцета (б); 1 - слой с эффектом памяти формы, 2 - упругий слой.
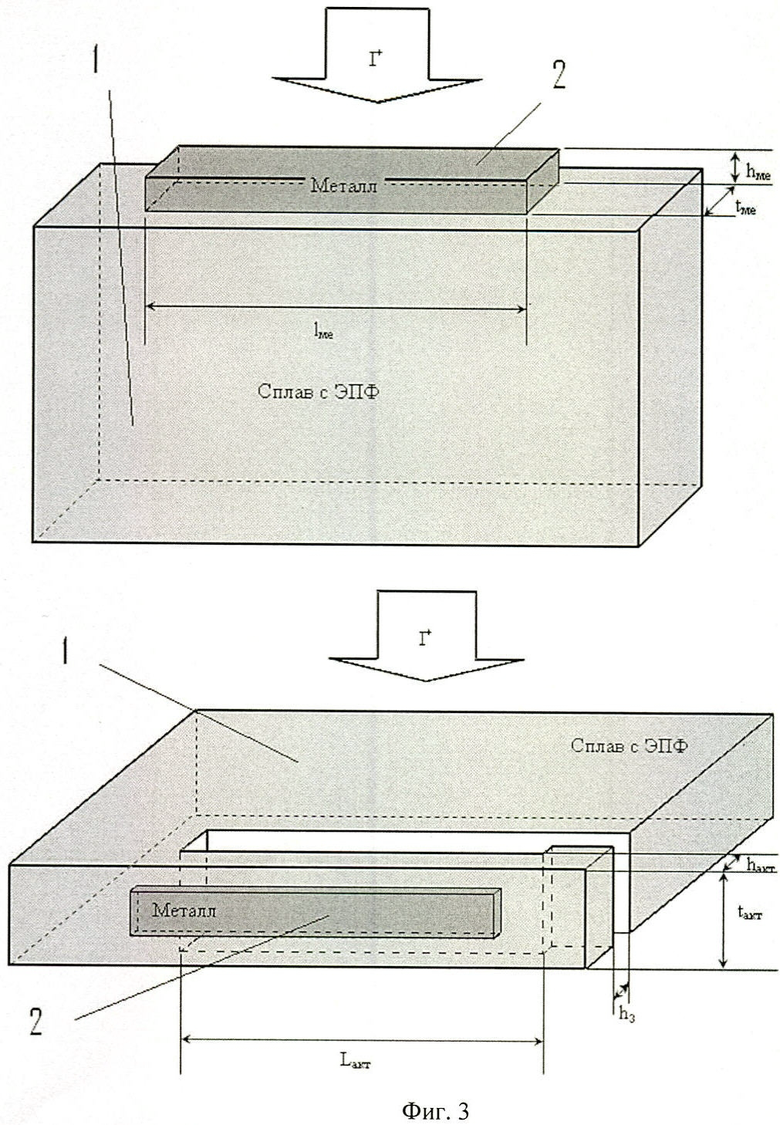
На фиг.3а представлена схема, поясняющая схему операций по изготовлению предлагаемого микромеханического устройства (нанесение упругого слоя); 1 - слой с эффектом памяти формы, 2 - упругий слой.
На фиг.3б представлена схема, поясняющая схему формирования структуры пинцета и захвата для удержания объекта; 1 - слой с эффектом памяти формы, 2 - упругий слой.
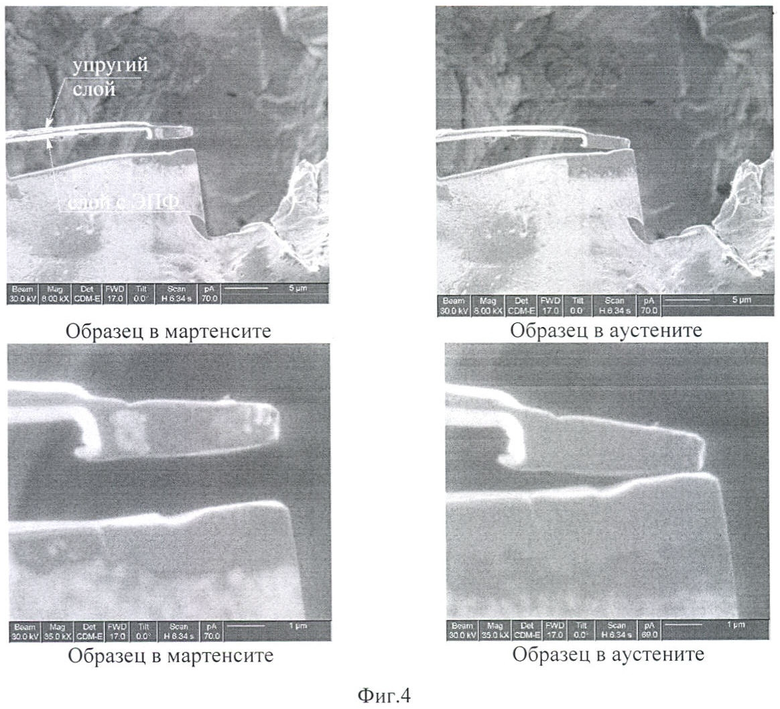
На фиг.4 показаны фотографии, демонстрирующие пример работы нормальноразомкнутого микропинцета в действии.
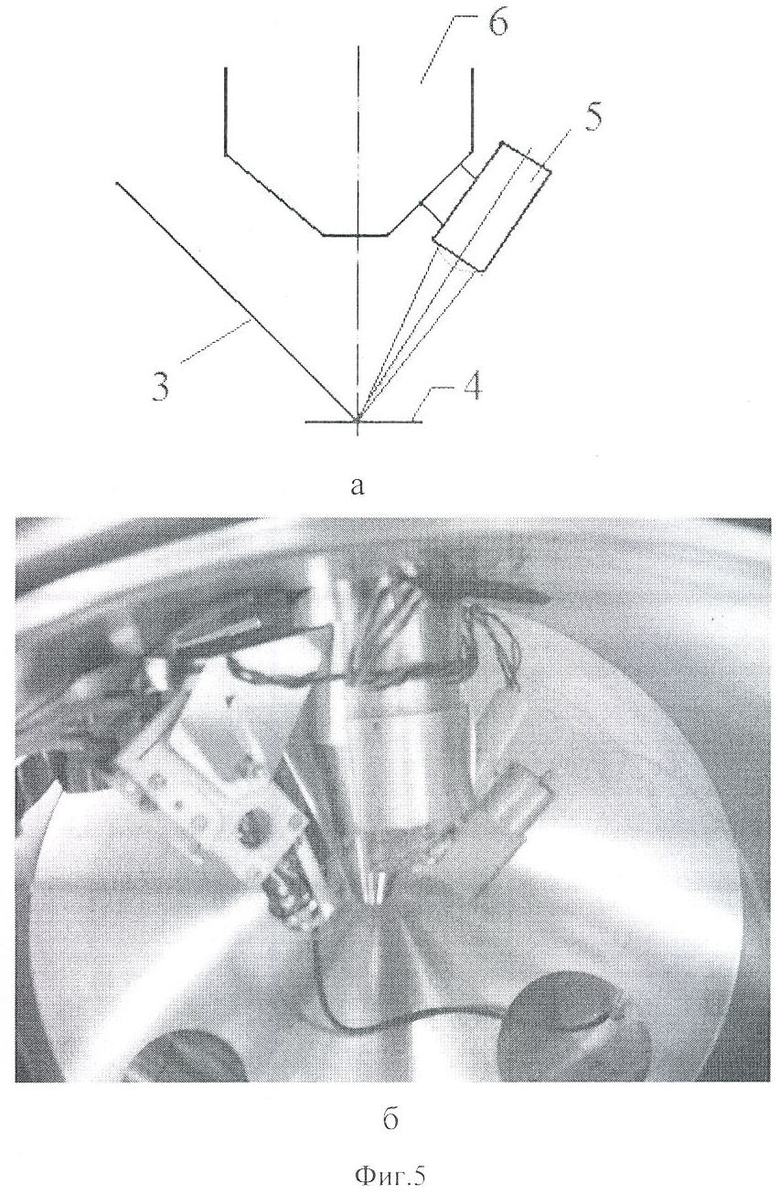
На фиг.5а показана схема системы для манипулирования микро- и нанообъектами, установленной в вакуумной камере ионного сканирующего микроскопа; 3 - микропроволока наноманипулятора, 4 - рабочее поле системы, 5 - полупроводниковый лазер, 6 - пушка ионного сканирующего микроскопа.
На фиг.5б показана фотография действующего макета системы для манипулирования микро- и нанообъектами, установленной в вакуумной камере ионного сканирующего микроскопа.
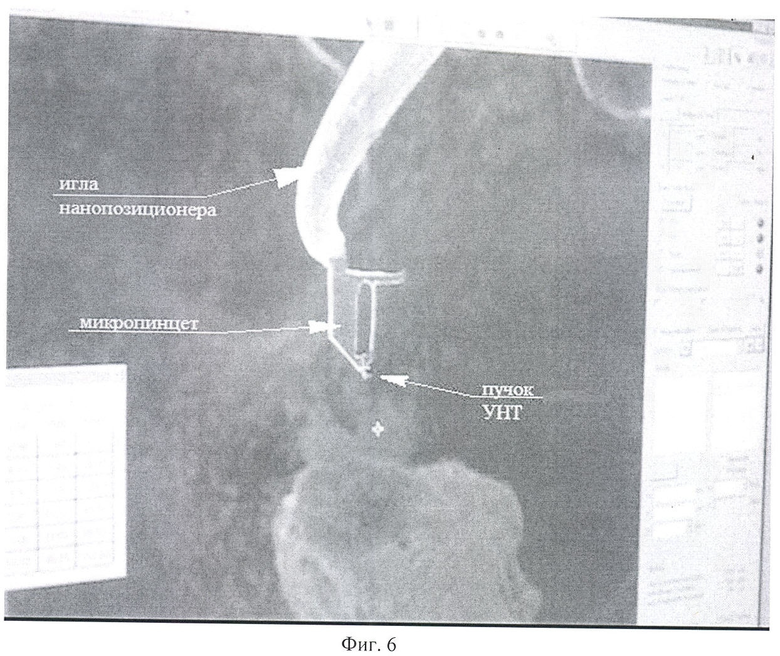
На рис.6 показана фотография, демонстрирующая микропинцет, укрепленный на конце микропроволоки нанопозиционера (наноманипулятора «Omniprobe»).
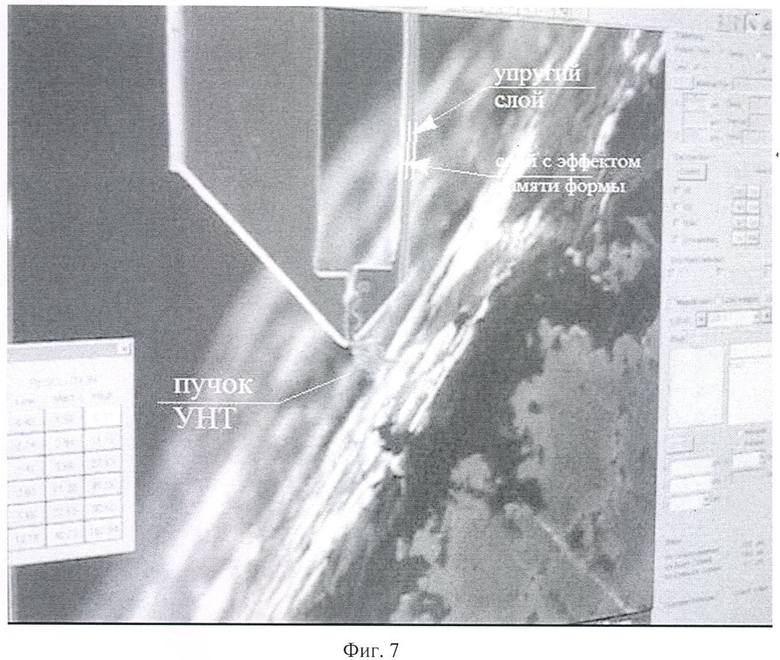
На рис.7 показана фотография, демонстрирующая процесс переноса системой манипулирования захваченного микропинцетом пучка углеродных нанотрубок.
Сущность предлагаемого технического решения состоит в том, что термочувствительные элементы и вся конструкция микромеханического устройства формируются на основе слоя с эффектом памяти формы, в который предварительно внесены псевдопластические деформации растяжения, а все основные операции по изготовлению структуры производятся при температуре ниже температуры перехода аустенит - мартенсит сплава с эффектом памяти формы. Новым является то, что примененные в способе операции, в частности нанесения упругого слоя в виде пленки на слой с памятью формы, позволяют изготовить термочувствительные элементы микро- и наноразмерной толщины, без потери уникальных свойств этих сплавов - гигантских относительных деформаций, управляемых внешними полями. Это обуславливает рекордно малый размер получаемых микромеханических устройств.
Рассмотрим физические принципы работы предлагаемого технического решения и сравним достигаемый эффект с прототипом (см. фиг.1) и известными аналогами. В основе работы предлагаемого микромеханического устройства лежит то, что изгибная деформация композитной пластины есть сжатие на внутренней стороне и растяжение - на внешней. Композитный термоуправляемый элемент состоит из слоя 1 элемента с эффектом памяти формы и слоя 2 упругого материала (например, металла) (см. фиг.2а и б). Сплав с эффектом памяти формы предварительно тренируют до достижения возвратимой деформации растяжения или сжатия.
Физическое объяснение состояния "возвратимой деформации" заключается в том, что под действием достаточно сильного внешнего напряжения температура структурного (мартенситного) перехода аустенит - мартенсит повышается. В напряженном образце, при охлаждении из аустенитного состояния через точку фазового перехода происходит генерация мартенсита. Она начнется в первую очередь в областях максимального напряжения. Будут генерироваться главным образом соответственно ориентированные варианты мартенсита (растянутые или сжатые по осям растяжения или сжатия). Таким образом «возвратимая деформация» - это состояние образца, в котором макроскопическое изменение его формы и/или размера достигнуто в мартенситном состоянии за счет генерации мартенситных вариантов с соответствующими ориентациями кристаллографических осей [2].
При последующем нагреве материал с эффектом памяти формы переходит в аустенитное состояние и возвращается к прежней форме и размеру. Это приведет к сильной изгибной деформации композитного актюатора. Обычно односторонний эффект памяти формы приводит к однократному восстановлению формы, несмотря на периодический нагрев/охлаждение, за что и получил свое название. Актюатор, выполненный из композита, при повторном охлаждении после нагрева восстановит свою форму. Он сохранит способность к периодическому изгибу и выпрямлению при периодическом термоциклировании через мартенситный переход, несмотря на то, что использует односторонний эффект памяти формы. Это объясняется упругими свойствами второго элемента композита. Если композит охладить ниже температуры мартенситного перехода, то упругий слой, возвращаясь в ненапряженное состояние, деформирует элемент с памятью формы и снова натренирует его до достижения состояния возвратимой деформации.
Двусторонний эффект памяти формы заключается в том, что, если образец сплава с термоупругим мартенситным переходом подвергнуть предварительно специальной процедуре «тренировки на двустороннюю память формы», путем сильного многократного деформирования в процессе термоциклирования через температуру мартенситного перехода, то он приобретет способность к периодической деформации при периодическом воздействии тепловым полем. Физическое объяснение двустороннего эффекта памяти формы заключается в том, что в процессе тренировки в сплаве появляются дефекты, например дислокации, создающее внутренние поля напряжений, которые деформируют сплав при мартенситном переходе. Количественно максимально достижимые возвратимые деформации, например в сплаве NiTi при одностороннем эффекте памяти формы, составляют 10-30%, а двусторонней - по крайней мере на порядок слабее (03%-3%) [2].
Основные технические преимущества по сравнению с прототипом [5] связаны с большой достигаемой деформацией, обратимой при повторном воздействии теплового поля и возможностью изготовить микромеханическое устройство на 1-2 порядка меньше по габаритам, чем прототип. В частности, в источнике [5] указывается, что предварительная деформация слоя с эффектом памяти формы достигается за счет напыления слоя с эффектом памяти (спав Ti-Ni-Cu ) на упругий кремниевый слой примерно при 500°С. В результате, когда напыленный слой и кремниевая упругая подложка начинают охлаждаться и слои начинают сжиматься, так как имеют различные коэффициенты теплового расширения, в двухсойном элементе начинают развиваться механические напряжения, и он изгибается (см. Фиг. 1) Однако после снижения температуры до 40-60°С, когда в сплаве Ti-Ni-Cu происходит переход аустенит - мартенсит напряжения релаксируют вследствие псевдопластической деформации мартенсита пленки Ti-Ni-Cu, и она выпрямляется. При нагреве до температры перехода мартенсит - аустенит она опять изогнется. Преимущества предлагаемого микромеханического устройства по величине деформации изгиба связаны с тем, что величина псевдопластической деформации слоя сплава с эффектом памяти формы может быть существенно больше, так как он задается предварительно, до проведения технологических операций формирования элемента. Псевдопластическая деформация сплавов с эффектом памяти формы может достигать 10% [2]. Наиболее удобным и технологичным способом тренировки ленты или пленки с памятью формы на одностороннюю память формы является растяжение в процессе охлаждения через температуру мартенситного перехода.
Магнитоиндуцированный эффект памяти формы, который наблюдается в ферромагнитных сплавах Гейслера с памятью формы (таких, как Ni-Mn-Ga, Co-Ni-Ga, Ni-Fe-Ga), также можно применить в предлагаемом техническом решении [3, 6, 7]. Этот эффект объясняется влиянием магнитного поля на границу мартенсит - аустенит в ферромагнитном образце сплава, который находится в промежуточном состоянии в области гистерезиса мартенситного перехода. Намагниченность насыщения мартенсита в сплавах Гейслера, как правило, выше, чем у аустенита, и в результате, в достаточно сильном магнитном поле, температура мартенситного перехода повышается, а границы мартенсит - аустенит сдвигаются в сторону увеличения объема мартенсита (независимо от ориентации поля). Актюатор по предлагаемому техническому решению с использованием ферромагнитного материала с памятью формы будет изменять свою форму под действием магнитного поля при постоянной температуре, выбранной несколько выше, чем температура мартенситного перехода.
К положительным свойствам, присущим предлагаемой конструкции микромеханического устройства, можно отнести высокое быстродействие. Оно обусловлено тем, что быстродействие актюатора на основе эффекта памяти формы ограничено, главным образом временем теплообмена с окружающей средой. Это время будет минимально (а быстродействие - максимально), если элемент выполнен в форме тонкого слоя. На основе предлагаемого способа можно изготовить рекордно тонкие слои с эффектом памяти формы и сформировать конструкции микроустройств реально микронных размеров.
На Фиг.3 показана схема такого практического процесса. Сначала преварительно растягивают псевдопластический слой сплава с эффектом памяти формы, изготовленный в виде быстрозакаленной ленты сплава Ti-Ni-Cu и при необходимости утоненный химическим травлением до толщины несколько микрон и менее. Затем методом ионностимулированного осждения в вакууме ионного сканирующего микроскопа на его поверхность наносят слой упругого металла - платины (см. фиг.3а). Затем на его краю формируют структуру пинцета и захват для удержания объекта (см. фиг.3б).
Чтобы привести микропинцет в действие, его необходимо нагреть и охладить (см. фиг.4). Для управления актюатором можно применить любой вид подогрева, например электрический подогрев. Однако, чтобы эффективно манипулировать нано- и микрообъектами, необходимо точно подвести микропинцет к объекту. Для этого микромеханическое устройство может быть присоединено к концу микропроволоки нанопозиционера (например, «Omniprobe»). Нагрев микропинцета в этой конфигурации возможен при подведении двух проводов к нагревательному элементу на конце микропроволоки либо путем лучистого подогрева.
Система манипулирования микро- и нанообъектами (см. фиг.5а и 5б). состоит из микропроволоки наноманипулятора (нанопозиционера) 3, на которой укреплен микропинцет, на рабочее поле системы 4 сфокусировано излучение полупроводникового лазера 5, укрепленного на пушке ионного сканирующего микроскопа 4 в его вакуумной камере. Система действует следующим образом: микрообъект на рабочем поле 4 наблюдается с помощью сканирующего микроскопа. С помощью нанопозиционера и системы позиционирования микроскопа конец микропроволоки с пинцетом совмещается с объектом и осуществляется захват путем включения питания лазера и нагрева всего рабочего поля. Размер поля обычно порядка нескольких мм2. Достаточно мощности около 300 мВт, чтобы осуществить нагрев рабочего поля системы до температуры около 60°С. В результате возможен захват, перенос и освобождение объектов, путем выключения питания лазера, как показано на фиг.6, 7.
Пример 1. В качестве конкретного примера реализации микромеханического устройства, способа его изготовления и системы манипулирования микрообъектами на его основе, опишем эксперимент по созданию микропинцета и по манипулированию при его помощи углеродными нанотрубками, который иллюстрируется фиг. 3-7. Микропинцет выполнен из быстрозакаленной ленты сплава с памятью формы Ti-Ni, толщиной 30 мкм, шириной 3 мм. Ленту псевдопластически растягивали, нагружая весом около 10 Н, при охлаждении от 80 С до комнатной температуры, а затем помещали в установку ионного травления фирмы FEI "Strata 200". На ленте формировали структуры, по схеме, отраженной на фиг. 3. Методом ионностимулированного осаждения создавали упругий слой вольфрама, как показано на фиг.4. При толщине упругого слоя 500 нм и толщине слоя с памятью формы 500 нм, нагревом до 70°С достигается сжатие микропинцета около 1 мкм. Этого достаточно для удержания пучка нанотрубок, как показано на фиг. 6 и 7.
Пример 2. То же, что и в примере 1, но согласно фиг.2а, упругий слой платины наносили с внешней стороны термочувствительных элементов микропинцета. В результате, получается конструкция нормально разомкнутого микропинцета, который при нагреве закрывается и, захватив микрообъект, может в дальнейшем, при выключени питании лазера, его освободить.
Пример 3. То же, что и в примере 1, но согласно фиг.2б, упругий слой платины наносили с внешней стороны микромеханического устройства. В результате, получается конструкция нормально замкнутого микрозажима, который при нагреве открывается и, захватив микрообъект, и может в дальнейшем, при выключенном питании лазера, его неограниченно долго удерживать. Для того чтобы освободить объект, необходимо повторно нагреть микропинцет.
Пример 4. То же, что и в примере 1, применяли быстрозакаленный сплав Ti2NiCu. Сразу после изготовления методом быстрой закалки, сплав - аморфный и в нем не наблюдается эффект памяти формы. Поэтому, после изготовления, ленту отжигают в течение 5 мин при 500°С на воздухе до достижения в ней эффекта памяти формы с температурами начала и конца прямого и обратного мартенситного переходов, соответственно, Ms=50°С, Mf=48, As=60, Af=64°С. Сплав отличается повышенной прочностью и технологичностью.
Пример 5. То же, что и в примере 1, но для изготовления сплава применен быстрозакаленный сплав из ферромагнитного сплава с памятью формы Ni2+X-YMn1-XFeyGa, 0<Х<0,2, 0<Y<0,2. При этом достигается возможность управления нанопинцетом без нагрева. При помощи включения и выключения магнитного поля.
Пример 6. То же, что и в примере 1, но для изготовления сплава применен быстрозакаленный сплав из ферромагнитного сплава с памятью формы Ni2-X-YMn1-XIn1-Y, 0<Х<0,2, 0,3<Y<0,4. При этом достигается возможность управления нанопинцетом без нагрева, при помощи включения и выключения магнитного поля с повышенной чувствительностью к полю. Этот материал (см. [6, 8]) обладает невысокими магнитными полями для обеспечения магнитоуправляемого мартенситного перехода, что повышает технологичность системы.
Пример 7. То же, что и в примере 1, но в качестве упругого элемента выбран слой платины. Платина, покрывая слой с эффектом памяти формы при комнатной температуре, образует прочный аморфный композит, повышая технологичность системы.
Пример 8. То, же что и в примере 2, но при формировании захватов микро- и нанообъектов для осуществления их отрезания и деформирования, захватам придается форма треугольной призмы, то есть ножа. В результате появляется возможность не только переносить объекты, но и обрабатывать, например, отрезать или пережимать с деформацией части объекта.
Пример 9. То же, что в Примере 8, но в упругий материал нанесен с внутренней стороны микромеханического устройства.
Пример 10. То же, что и в примере 9, но в качестве материала с эффектом памяти формы выбран быстрозакаленный сплав Ti2NiCu.
Пример 11. То же, что и в примере 9, в качестве материала с эффектом памяти формы выбран сплав Ni2+X-YMn1-XFeyGa, 0<X<0,2, 0<Y<0,2.
Пример 12. То же, что и в примере 9, в качестве материала с эффектом памяти формы выбран сплав Ni2-X-YMn1-XIn1-Y, 0<X<0,2, 0,3<Y<0,4.
Пример 13. То же, что и в примере 11, но в качестве упругого элемента выбран слой платины.
Пример 14. Опишем способ изготовления микромеханического устройства в соответствии с Примером 1. Первоначально изготовляют сплав с эффектом памяти формы, например, в виде быстрозакаленной ленты сплава, затем ленту подготавливают, путем внесения в нее псевдопластической деформации растяжения, как описано в Примере 1. После этой операции она поддерживается при комнатной температуре, в соответствии с температурами мартенситного перехода, указанными в Примере 4. Все дальнейшие операции по изготовлению микропинцета проводятся при температуре ниже 40°С, как описано в Примере 1.
Пример 15. То же, что и в примере 14, но операции изготовления упругого слоя и операцию соединения слоев, производят одновременно методом ионно-стимулированного осаждения металла на поверхность сплава с эффектом памяти формы.
Пример 16. То же, что и в примере 14, но операции формирования слоя с эффектом памяти формы и формирования захвата манипулируемого объекта производится методом селективного ионного травления.
Пример 17. Система манипулирования микрообъектами на основе микромеханического устройства описана в Примере 1 и показана на фиг.5-7. Ее внешний вид в вакуумной камере ионного сканирующего микроскопа показан на фиг.6. Результат действия - захват и перемещение пучка углеродных нанотрубок показан на фиг 6, 7.
Пример 18. То же, что и в Примере 17, но в системе манипулирования микрообъектами применен лазерный источник в виде полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования.
Пример 19. То же, что и в примере 17, но система манипулирования микрообъектами расположена в вакуумной камере сканирующего электронного микроскопа с возможностью визуального контроля процесса манипулирования микро- или нанообъекта и управления этим процессом, путем перемещения конца микропроволоки, укрепленной на нанопозиционере и контроля мощности излучения лазерного источника подогрева рабочего поля, путем регулировки тока питания полупроводникового инжекционного лазера.
Технический результат предлагаемого решения заключается, таким образом, в повышении эффективности систем микро- и наноманипулирования и расширении его функциональных возможностей и повышении технологичности за счет снижения габаритов устройства, в том числе до субмикронного масштаба, увеличения достигаемой контролируемой деформации, достижения контролируемых перемещений и манипуляций с реальными нанообъектами такими, как нанотрубки, наночастицы, нанослои, биологические нанообъекты и т.д., а также за счет повышения технологичности и экономичности за счет достижения возможности изготовления больших количеств изделий в едином технологическом цикле.
ЛИТЕРАТУРА
1. Электрические и электронные аппараты. Под ред. Ю.К.Розанова. М.: Информэлектро. 2001, стр.109.
2. А.Г.Хунджуа. Введение в структурную физику сплавов с эффектом памяти формы. МГУ, 1991. В.Н.Журавлев, В.Г.Пушин. Сплавы с термомеханической памятью и их применение в медицине. Екатеринбург. 2000.
3. А.Н.Васильев и др. Способ управления формой исполнительного элемента. Патент РФ №2221076. Опубл. 10.01.2004, БИ №1.
4. Р.М.Гречишкин, В.В.Коледов, А.В.Королев, Н.И.Коуров, Е.П.Красноперов, Г.А.Лебедев, В.Г.Пушин, А.А.Тулайкова, В.В.Ховайло, В.Г.Шавров. Патент РФ №2305874, Актюатор, система актюаторов и способ его изготовления. Приоритет от 27.05.2005. Опубликовано 10.09.2007, Бюл. №25.
5. A.P.Lee, D.L.Ciarlo, P.A.Krulevitch et al. A practical microgripper by fine alignement, eutectic bonding and SMA actuation. Sensors and Actuators A 54 (1996), p.755-759.
6. J.Liu, S.Aksoy, N.Scheerbaum, et al. Large magnetostrain in polycrystalline Ni-Mn-In-Co. Appl. Phys. Lett. 95 (2009) 232515.
7. A.A.Cherechukin et al. Phys. Lett. A291, 175 (2001).
8. Sanchez Llamazares, J.L., Hernando, В., Prida, V.M., Garcia, C., Gonzalez, J., Varga, R., Ross, C.A. Magnetic field influence on the structural transformation in ferromagnetic shape memory alloy Mn50 Ni40 In 10 melt spun ribbons Journal of Applied Physics, 105 (7), (2009) 07A945.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2021 |
|
RU2778525C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| Система управления устройством с эффектом памяти формы для манипулирования микро- и нанообъектами | 2022 |
|
RU2790934C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА С ОБРАТИМОЙ ПАМЯТЬЮ ФОРМЫ ИЗ КВАЗИБИНАРНОГО СПЛАВА ИНТЕРМЕТАЛЛИЧЕСКОЙ СИСТЕМЫ TiNi-TiCu (ВАРИАНТЫ) | 2016 |
|
RU2692711C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| АКТЮАТОР | 2007 |
|
RU2367573C2 |
| Метаматериал для управления преломлением и отражением электромагнитного излучения | 2023 |
|
RU2819591C1 |
| АКТЮАТОР, СИСТЕМА АКТЮАТОРОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2305874C2 |
Изобретение может найти применение в области радиоэлектроники, машиностроения, нанотехнологии, электронной микроскопии, медицине. Изобретение направлено на уменьшение габаритов, на расширение функциональных возможностей за счёт обеспечения возможности манипулирования микро- и нанообъектами, возможности деформирования и обработки микро- и нанообъектов, возможности совместимости предлагаемой системы манипулирования микро- и нанообъектами с существующими системами наблюдения, исследования и наноманипулирования, а также на повышение быстродействия и упрощение технологии серийного производства, что обеспечивается за счет того, что устройство согласно изобретению содержит два плоских элемента, по крайней мере один из которых выполнен термочувствительным и состоящим из двух прочно соединенных между собой слоев, из которых один изготовлен из сплава с эффектом памяти формы с псевдопластической деформацией растяжения, а другой - из упругого материала. Плоские элементы соединены с одного конца, с другого конца сформирован захват для удержания объекта манипулирования. При изготовлении устройства предварительно изготовляют слой сплава с эффектом памяти формы и вносят в него псевдопластическую деформацию растяжения, а затем соединяют его с упругим слоем, причем соединение слоев производят при температуре ниже температуры мартенситного превращения в сплаве с эффектом памяти формы. Система манипулирования микрообъектами состоит из микромеханического устройства, закрепленного на конце микропроволоки нанопозиционера, рабочего поля с манипулируемым объектом и источника подогрева в виде полупроводникового лазера, излучение которого сфокусировано на рабочее поле системы манипулирования, включая конец микропроволоки с микропинцетом. 4 н. и 15 з.п. ф-лы, 7 ил.
1. Микромеханическое устройство, включающее два плоских элемента, вытянутых вдоль оси устройства, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из сплава с эффектом памяти формы, а другой - из упругого материала, причем слои прочно соединены между собой, плоские элементы соединены с одного конца устройства, а с другого конца сформирован захват для удержания объекта манипулирования, выполненный в форме прямоугольных призм, отличающееся тем, что в термочувствительном элементе упругий слой выполнен в виде пленки упругого материала, нанесенной на слой сплава с эффектом памяти формы с псевдопластической деформацией растяжения вдоль оси устройства, а захват для удержания объекта сформирован в слое сплава с эффектом памяти формы.
2. Микромеханическое устройство по п.1, отличающееся тем, что для достижения его сжатия при нагреве (нормально разомкнутое микромеханическое устройство), упругий слой расположен с внешней стороны устройства.
3. Микромеханическое устройство по п.1, отличающееся тем, что для достижения его раскрытия при нагреве (нормально замкнутое микромеханическое устройство), упругий слой расположен с внутренней стороны устройства.
4. Микромеханическое устройство по п.1, отличающееся тем, что в качестве материала с эффектом памяти формы выбран быстрозакаленный сплав Ti2NiCu.
5. Микромеханическое устройство по п.1, отличающееся тем, что в качестве материала с эффектом памяти формы выбран сплав Ni2+X-YMn1-XFeYGa, 0<Х<0,2, 0<Y<0,2.
6. Микромеханическое устройство по п.1, отличающееся тем, что в качестве материала с эффектом памяти формы выбран сплав Ni2-X-YMn1-XIn1-Y, 0<Х<0,2, 0,3<Y<0,4.
7. Микромеханическое устройство по п.1, отличающееся тем, что в качестве упругого слоя выбран слой платины.
8. Микромеханическое устройство, включающее два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из сплава с эффектом памяти формы с псевдопластической деформацией растяжения, а другой - из упругого материала, причем слои прочно соединены между собой, элементы соединены с одного конца, а с другого конца сформирован захват для работы с объектом манипулирования, отличающееся тем, что в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с эффектом памяти формы, с внешней стороны устройства, а захват сформирован в сплаве с памятью формы, который выполнен в форме треугольных призм, для осуществления отрезания микро- и нанообъектов.
9. Микромеханическое устройство по п.8, отличающееся тем, что для достижения его раскрытия при нагреве (нормально замкнутое микромеханическое устройство), упругий слой расположен с внутренней стороны устройства.
10. Микромеханическое устройство по п.8, отличающееся тем, что в качестве материала с эффектом памяти формы выбран быстрозакаленный сплав Ti2NiCu.
11. Микромеханическое устройство по п.8, отличающееся тем, что в качестве материала с эффектом памяти формы выбран сплав Ni 2+X-YMn1-XFeyGa, 0<Х<0,2, 0<Y<0,2.
12. Микромеханическое устройство по п.8, отличающееся тем, что в качестве материала с эффектом памяти формы выбран сплав Ni2-X-YMn1-XIn1-Y, 0<Х<0,2, 0,3<Y<0,4.
13. Микромеханическое устройство по п.8, отличающееся тем, что в качестве упругого элемента выбран слой платины.
14. Способ изготовления микромеханического устройства, включающий операцию изготовления слоя материала с эффектом памяти формы, изготовление слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, отличающийся тем, что операцию формирования слоя с эффектом памяти формы и внесения в него деформации псевдопластического растяжения производят предварительно до соединения, а затем создают упругий слой и соединяют слои для получения термочувствительного элемента, проводят напыления на поверхность слоя сплава с эффектом памяти формы слоя упругого материала, а затем формируют захват микромеханического устройства на слое с эффектом памяти формы, при этом операцию нанесения упругого слоя производят при температуре материала с эффектом памяти формы менее температуры перехода аустенит - мартенсит.
15. Способ изготовления микромеханического устройства по п.14, отличающийся тем, что операции изготовления упругого слоя и операцию соединения слоев производят одновременно методом ионно-стимулированного осаждения металла на поверхность сплава с эффектом памяти формы.
16. Способ изготовления микромеханического устройства по п.14, отличающийся тем, что операции формирования слоя с эффектом памяти формы и формирования захвата манипулируемого объекта производятся методом селективного ионного травления.
17. Система манипулирования микро- и нанообъектами, включающая микромеханическое устройство по пп.1-7 или 8-13, закрепленное на конце микропроволоки, рабочее поле с манипулируемым объектом и источник подогрева, отличающаяся тем, что другой конец микропроволоки укреплен на нанопозиционере, а система подогрева выполнена в виде лазерного источника нагрева, излучение которого сфокусировано на рабочее поле системы манипулирования, включая конец микропроволоки с микромеханическим устройством.
18. Система манипулирования микрообъектами по п.17, отличающаяся тем, что лазерный источник выполнен в виде полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования.
19. Система манипулирования микрообъектами по п.17, отличающаяся тем, что она расположена в вакуумной камере сканирующего ионного или электронного микроскопа с возможностью визуального контроля процесса манипулирования микро- или нанообъектами и управления этим процессом, путем перемещения конца микропроволоки, укрепленной на нанопозиционере и контроля мощности излучения лазерного источника подогрева рабочего поля, путем регулировки тока питания полупроводникового инжекционного лазера.
| A.P.LEE, D.L.CIARLO, P.A.KRULEVITCH ET | |||
| AL | |||
| A PRACTIAL MICROGRIPPER BY FINE AUGMENT, EUTECTIC BONDING AND SMA ACTUATION | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| АКТЮАТОР, СИСТЕМА АКТЮАТОРОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2305874C2 |
| ТЕРМОЧУВСТВИТЕЛЬНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1997 |
|
RU2117354C1 |
| WO 2008142980 A1, 27.11.2008 | |||
| JP 2002178289 A, 25.06.2002 | |||
| WO 9819320 A1, 07.05.1998. | |||

