Изобретение относится к области приборостроения, микросистемной техники и наномеханики, в частности, к технике устройств на основе материалов с эффектом памяти формы (ЭПФ) для манипулирования микро- и нанообъектами и может найти применение в радиоэлектронике, машиностроении, нанотехнологии, электронной микроскопии, медицине, биологии.
Известно техническое решение (аналог) - микромеханическое устройство с ЭПФ, способ его изготовления и система манипулирования микро- и нанообъектами, представленное в патенте [1].
Микромеханическое устройство для захвата и манипулирования микро и нанообъектов (нанопинцет), согласно аналога, включает два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из предварительно псевдопластически растянутого сплава с ЭПФ, а другой из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, причем в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с ЭПФ с внешней стороны устройства, а захват для удержания объекта сформирован в сплаве с памятью формы. Для достижения раскрытия нанопинцета при нагреве, упругий слой расположен с внутренней стороны микропинцета.
Способ изготовления устройства для захвата и манипулирования микро и нанообъектов (нанопинцета), согласно аналога, включает операцию изготовления слоя материала с ЭПФ с псевдопластической деформацией растяжения, изготовление слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, причем предварительно производят операцию формирования слоя с ЭПФ и внесения в него деформации псевдопластического растяжения, а затем операции создания упругого слоя и соединения слов для получения термочувствительного элемента, проводят путем напыления на поверхность слоя сплава с ЭПФ слоя упругого материала, а затем формируют захват манипулируемого объекта на слое с ЭПФ. при этом операцию нанесения упругого слоя производят при температуре материала с ЭПФ ниже температуры переход мартенсит - аустенит сплава.
Система манипулирования микрообъектами на основе микромеханического устройства, согласно аналога, включает микромеханическое устройство, закрепленное на конце микропроволоки, рабочее поле с манипулируемым объектом и источник подогрева, причем другой конец микропроволоки укреплен на нанопозиционере, а система подогрева выполнена в виде лазерного источника нагрева, состоящего из полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования, включая конец микропроволоки с нанопинцетом.
К недостаткам аналога относится низкая технологичность, и низкая экономичность (энергоэффективность) системы нагрева устройства для захвата и манипулирования микро и нанообъектов (нанопинцета) с ЭПФ при помощи лазерного источника нагрева, состоящего из полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования, включая конец микропроволоки с нанопинцетом, а также большие размеры лазерной системы и системы фокусировки, которую необходимо разместить в вакуумной камере электронного или ионного микроскопа.
Прототипом предлагаемого технического решения является система управления устройством с ЭПФ для манипулирования микро- и нанообъектами [2]. Известная система управления устройством с ЭПФ для манипулирования микро- и нанообъектами, включает микропроволку, на ее конце, который выполнен коническим, заточка которого осуществляется методами электро-химического травления, закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, а также рабочее поле с манипулируемым объектом и источник подогрева, а основание микропроволоки укреплено на нанопозиционере, причем источник подогрева, выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте с микропроволокой вблизи ее конца, и электронную систему питания и управления током, протекающим через резистивный элемент, а также подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током.
К недостаткам прототипа можно отнести низкую технологичность и низкое качество манипулирования, обусловленные тем, что при активации тепловым воздействием устройства с ЭПФ для манипулирования нанообъектами, происходит тепловой дрейф устройства из-за теплового расширения микропроволоки, на коническом конце которой укреплено устройство.
Цель предполагаемого изобретения: повышение качества и технологичности процесса наноманипулирования за счет минимизации теплового дрейфа устройства манипулирования (нанопинцета) при его термической активации, что приводит к уменьшению погрешности процесса манипулирования, а также снижение потребляемого тока и повышение его быстродействия и производительности в целом.
Поставленные цели достигаются тем, что в системе управления устройством с ЭПФ для манипулирования микро- и нанообъектами, которая включает микропроволку, на ее конце, который выполнен коническим, заточка которого осуществляется методами электро-химического травления, закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, а также рабочее поле с манипулируемым объектом и источник подогрева, а основание микропроволоки укреплено на нанопозиционере, причем источник подогрева, выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте с микропроволокой вблизи ее конца, и электронную систему питания и управления током, протекающим через резистивный элемент, а также подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током, конец микропроволоки имеет переменный профиль, который является комбинацией геометрических фигур - усеченный конус, цилиндр с диаметром меньшим, чем диаметр проволоки у ее основания и конус, на острие которого расположено устройство с ЭПФ для манипулирования микро- и нанообъектами, причем, нагревательный элемент располагается на поверхности цилиндра с меньшим диаметром в непосредственной близости к конусу.
Поставленные цели достигаются также тем, что в системе управления устройством с ЭПФ для манипулирования микро- и нанообъектами цилиндрическая часть микропроволоки на ее конце имеет диаметр преимущественно в 5-10 раз меньше, чем микропроволока у ее основания.
В дальнейшем предлагаемое техническое решение поясняется в связи с рисунками.
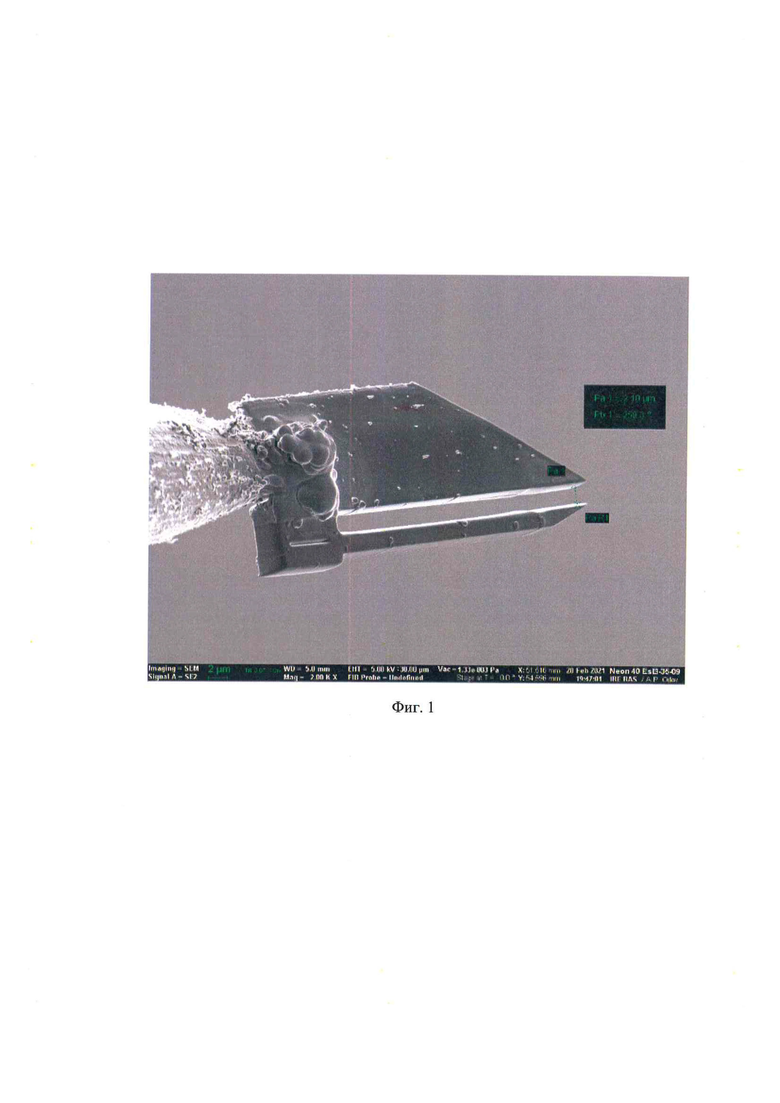
На фиг.1 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая общий вид устройства для манипулирования микро- и нанообъектами (нанопинцета) с ЭПФ согласно аналогу [1].
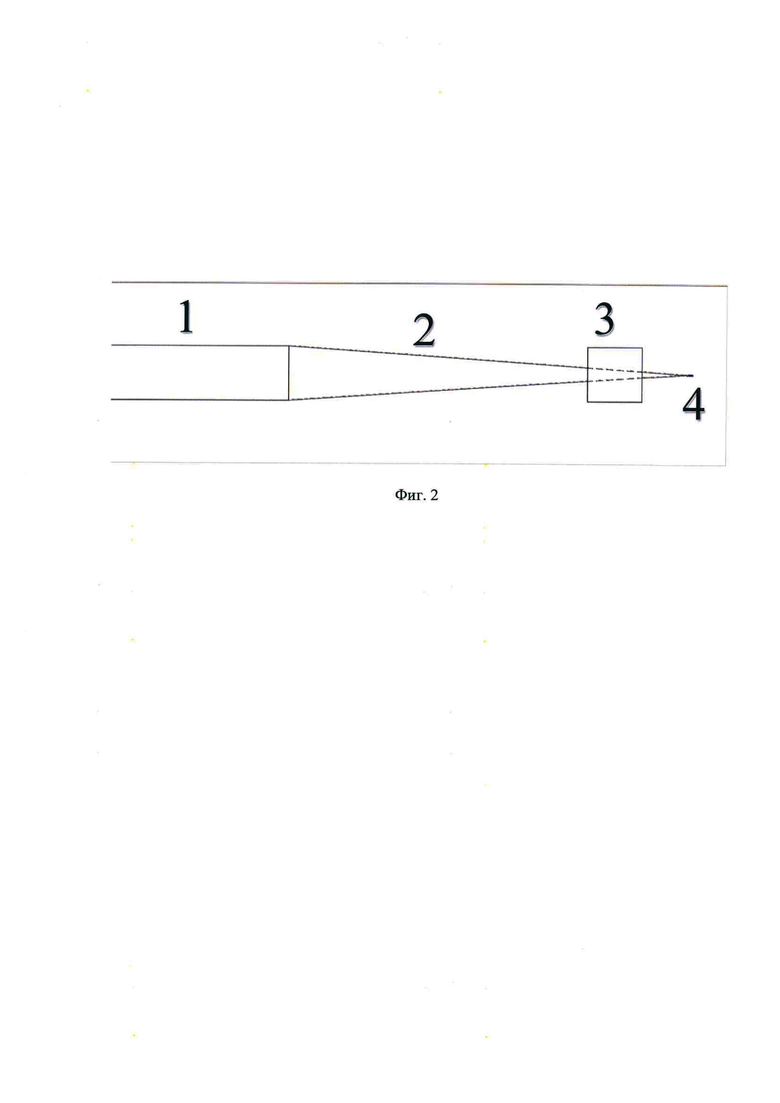
На фиг.2 показана схема системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета), включающая в себя микропроволоку (1), заостренный конец микропроволоки (2), резистивный нагревательный элемент (3) и устройство для манипулирования микро- и нанообъектами (нанопинцет) с ЭПФ (4) согласно прототипу [2].
На фиг.3 показана схема системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) с ЭПФ, включающая в себя микропроволоку (1), усеченный конус (5), цилиндр меньшего диаметра, чем диаметр микропроволоки (6), резистивный нагревательный элемент (3), конусовидный конец микропроволоки (7) и устройство для манипулирования микро- и нанообъектами (нанопинцет) с ЭПФ (4) согласно предлагаемому техническому решению.
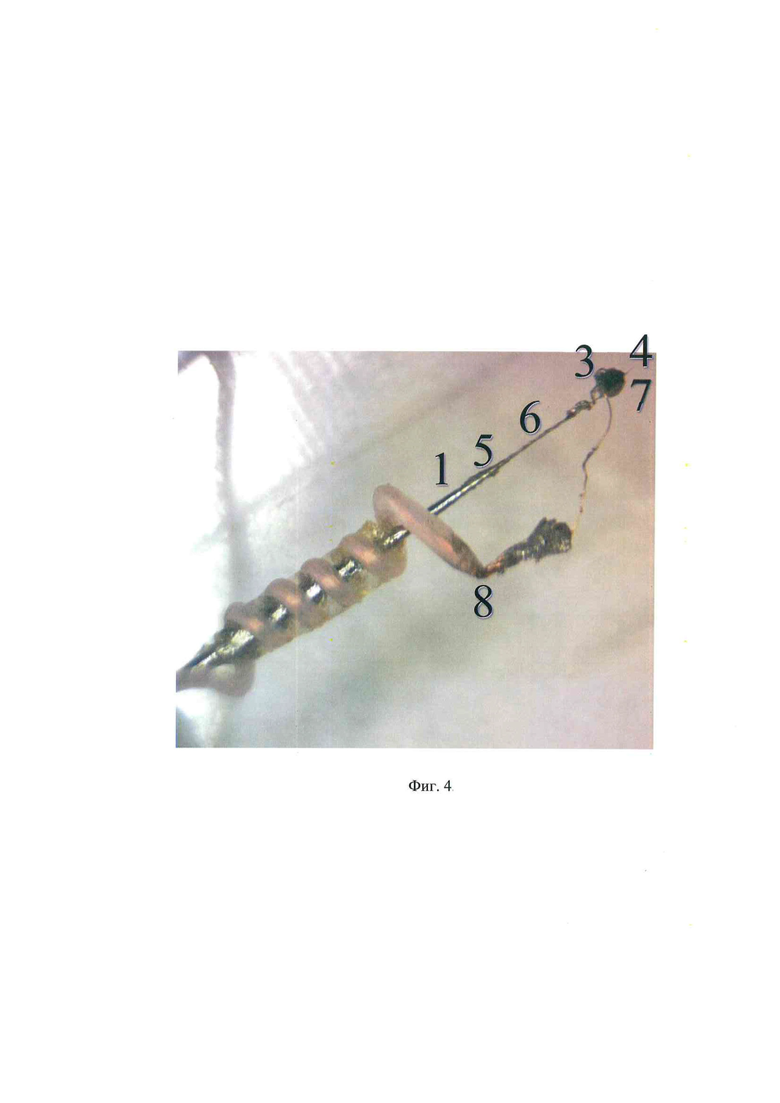
На фиг.4 показана фотография системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета), включающая в себя подводящие провода (8), микропроволоку (1), усеченный конус (5), цилиндр меньшего диаметра, чем диаметр микропроволоки (6), резистивный нагревательный элемент (3), конусовидный конец микропроволоки (7) и устройство для манипулирования микро- и нанообъектами (нанопинцет) с ЭПФ (4) согласно предлагаемому техническому решению.
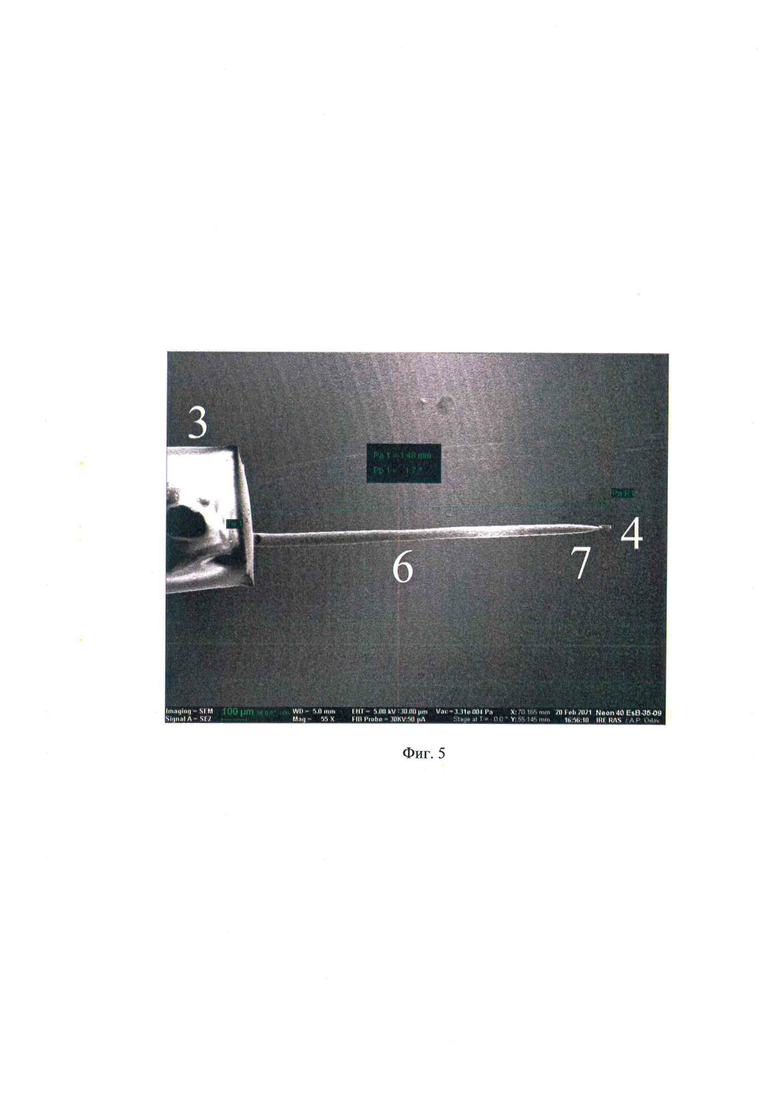
На фиг.5 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая систему управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета), включающая в себя резистивный нагревательный элемент (3), цилиндр меньшего диаметра, чем диаметр микропроволоки (6), конусовидный конец микропроволоки (7) и устройство для манипулирования микро- и нанообъектами (нанопинцет) с ЭПФ (4) согласно предлагаемому техническому решению.
На фиг.6 показан график зависимости температуры микропроволоки в зависимости от времени и координаты, полученный в результате численного моделирования, при условии постоянства температуры в основании микропроволоки.
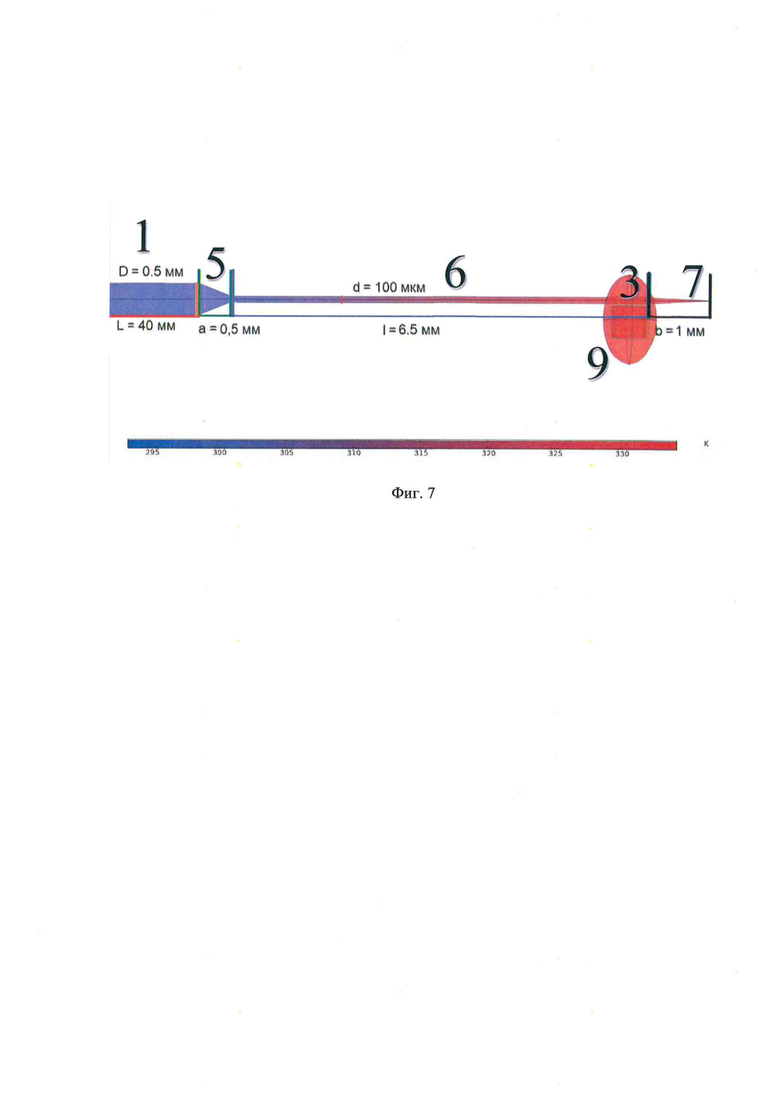
На фиг.7 трехмерная модель структуры системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) примятая для численного моделирования процесса продольного нагрева микропроволоки вблизи ее кончика, при условии постоянства температуры в основании микропроволоки (усеченный конус (5), цилиндр меньшего диаметра, чем диаметр микропроволоки (6), резистивный нагревательный элемент (3), конусовидный конец микропроволоки (7), теплопроводящий клей, с помощью которого резистивный нагревательный элемент прикреплен к микропроволоке.
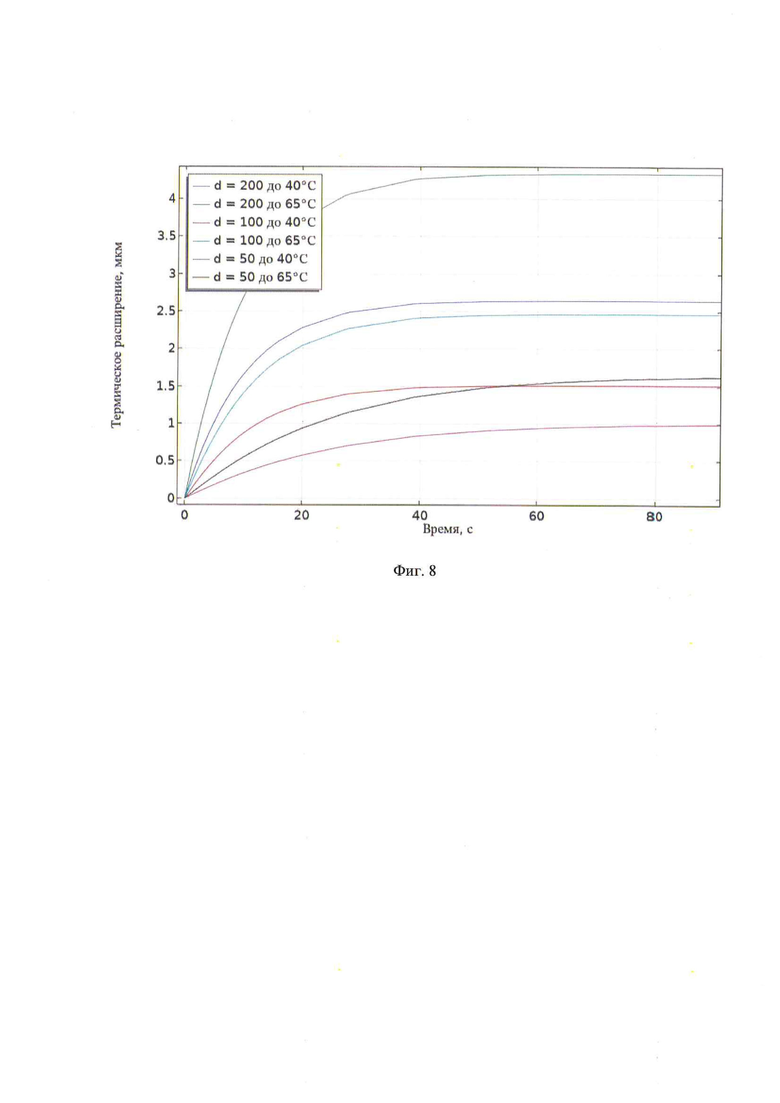
На фиг.8 показан график зависимости термического расширения микропроволоки с различными значениями диаметра (200, 100, 50 мкм) цилиндра (6) меньшего диаметра чем диаметр проволоки от времени, полученный в результате численного моделирования, при условии постоянства температуры в основании микропроволоки.
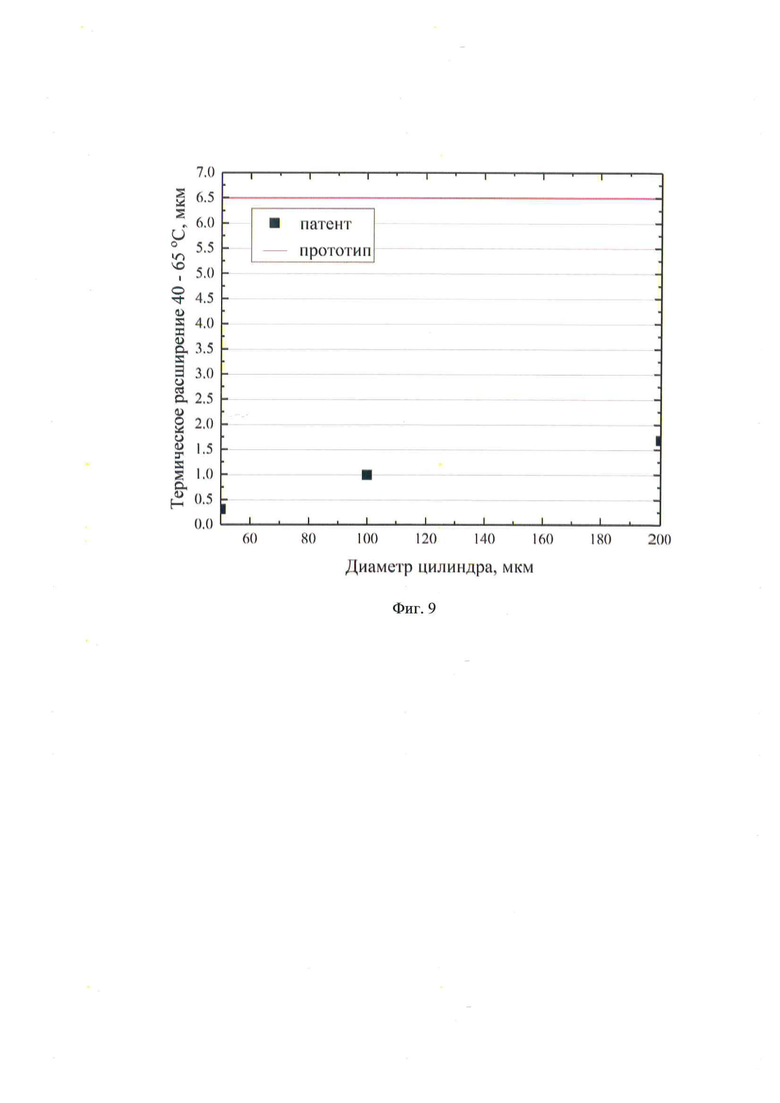
На фиг, 9 показан график зависимости термического расширения микропроволоки от значения диаметра (200, 100, 50 мкм) цилиндра (6) меньшего диаметра, чем диаметр проволоки, в диапазоне температур 40-60°С, полученный в результате численного моделирования, при условии постоянства температуры в основании микропроволоки.
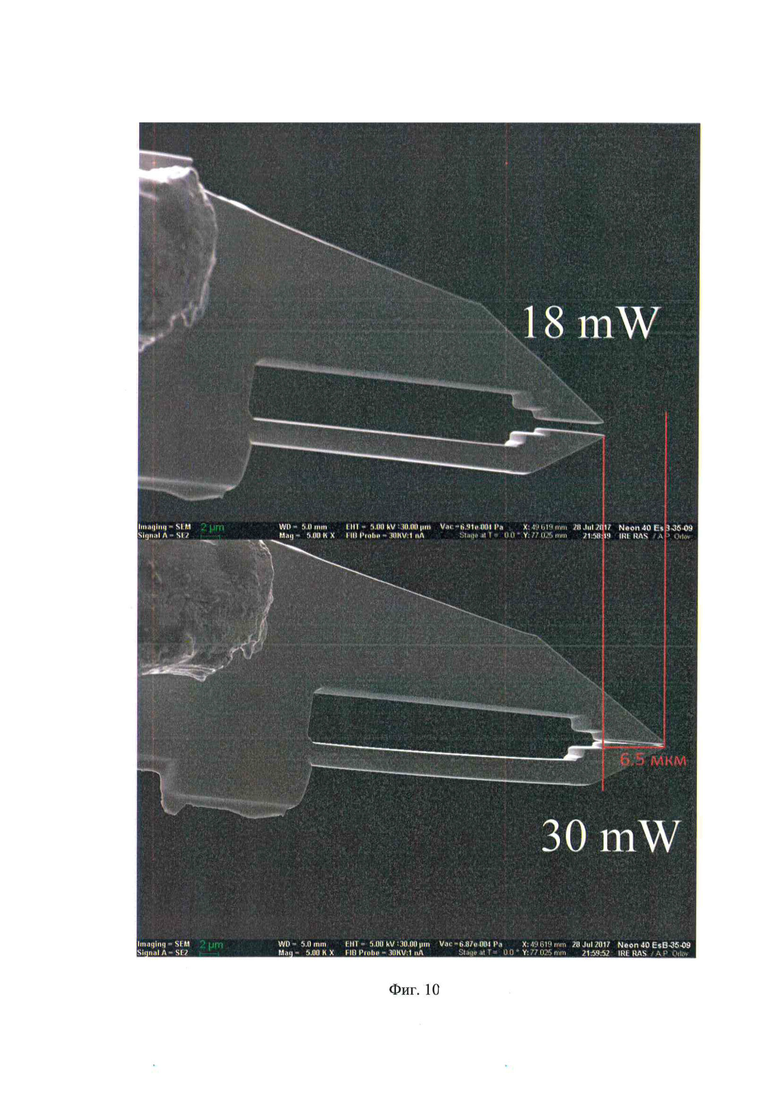
На фиг.10 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая тепловой дрейф системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) в диапазоне температур 40-65°С согласно прототипу.
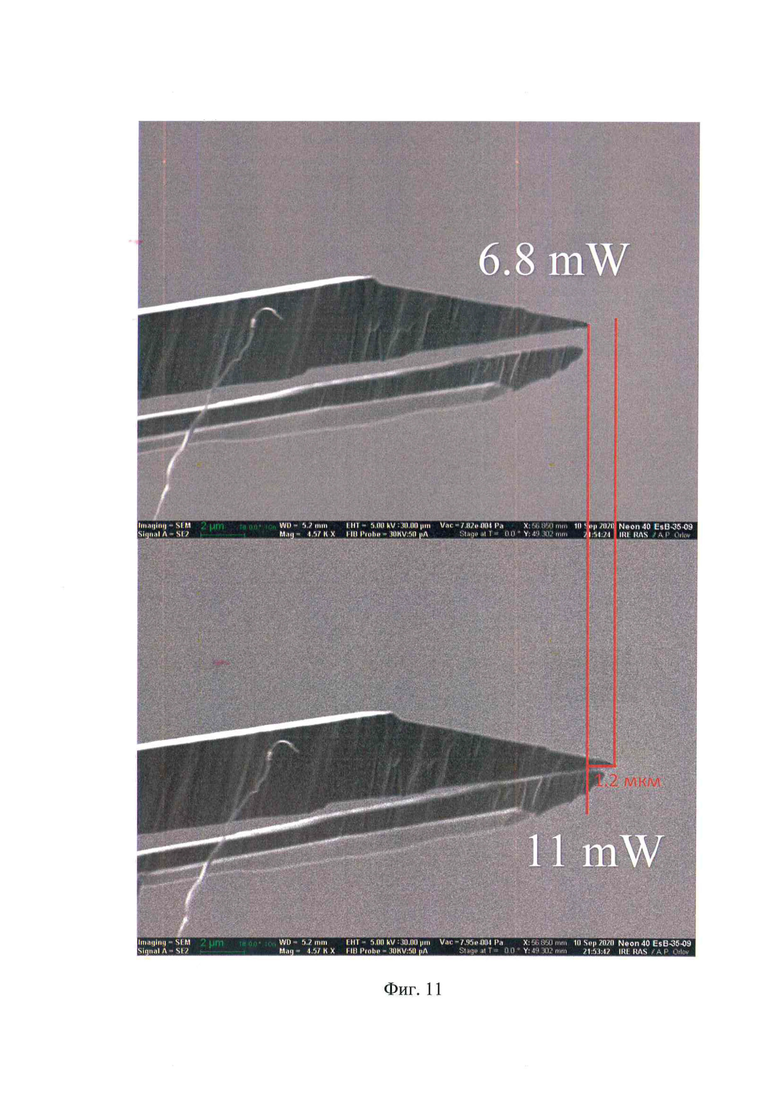
На фиг.11 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая тепловой дрейф системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) в диапазоне температур 40-65°С согласно предлагаемому техническому решению по примеру 1.
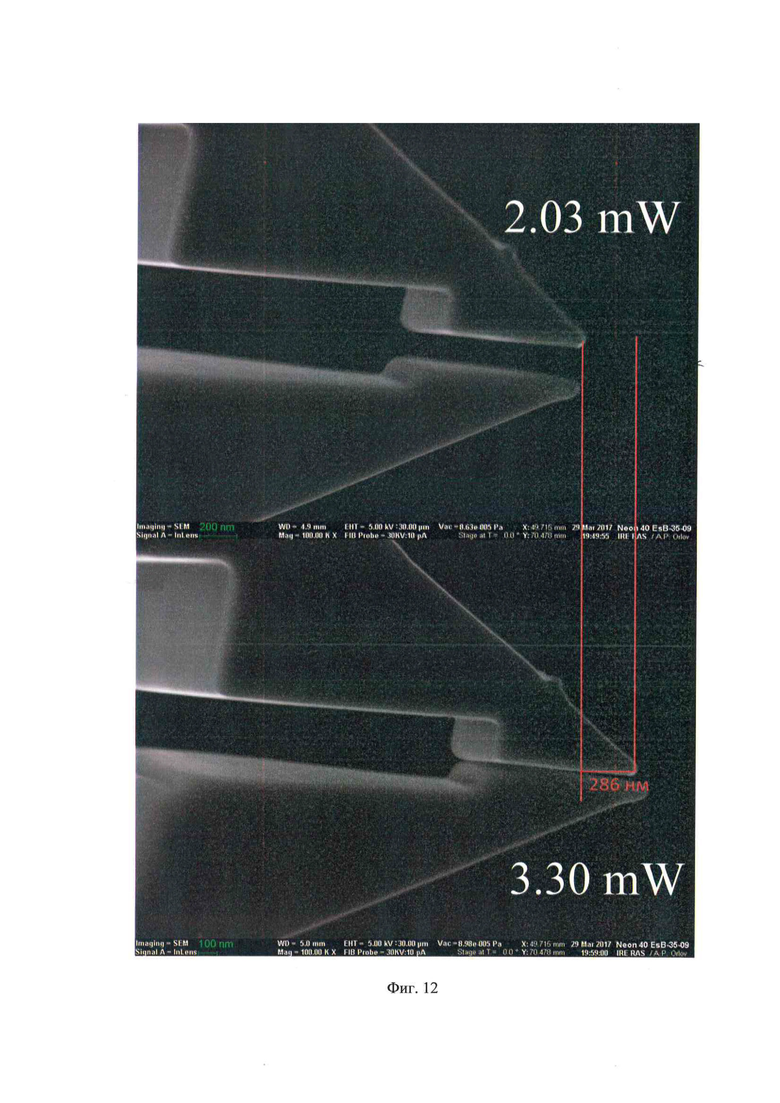
На фиг.12 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая тепловой дрейф системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) в диапазоне температур 40-65°С согласно предлагаемому техническому решению по примеру 2.
Новым в предложенном техническом решении, по сравнению с известным, является то, что конец микропроволоки имеет переменный профиль, который является комбинацией геометрических фигур - усеченный конус, цилиндр с диаметром меньшим, чем диаметр проволоки у ее основания и конус, на острие которого расположено устройство с ЭПФ для манипулирования микро- и нанообъектами, причем, нагревательный элемент располагается на поверхности цилиндра с меньшим диаметром в непосредственной близости к конусу. Такая геометрия конца микропроволоки позволяет лимитировать распространение теплового потока вглубь микропроволоки, снижает неизбежный тепловой дрейф нанопинцета, а также снижает количество потребляемой энергии, необходимой для нагрева устройства с ЭПФ, что в конечном итоге значительно уменьшает тепловой дрейф системы управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета), а как следствие повышает скорость, энергоэффективность и точность наноманипулирования.
Снижение потребляемой мощности и увеличение быстродействия обусловлено уменьшенным, по сравнению с прототипом, объемом вещества проволоки, который необходимо нагреть для активации ЭФП в устройстве для манипулирования микро- и нанобъектами. Это связано с тем, что уменьшение диаметра микропроволоки на конце вызывает увеличение ее теплового сопротивления. Обратно пропорционально тепловому сопротивлению уменьшается тепловой поток, необходимый для поддержания температуры нанопинцета.
Система управления устройством с ЭПФ для манипулирования микро- и нанообъектами (нанопинцета) функционирует на принципе термической активации ЭПФ в сплаве с термоупругим мартенситным переходом, например, T2NiCu. Принцип активации нанопинцета заключается в его нагреве и охлаждении, соответственно выше и ниже, температуры завершения обратного (от мартенситиой фазы к аустенитной) (Af) и прямого (от аустенитной фазы к мартенситной) - (Mf). При фазовом мартенситном термоупругом переходе происходит изменение кристаллографической симметрии сплава. При температуре Т > Af сплав находится в кубической аустенитной фазе. При охлаждении ниже Mf, он переходит в низкосимметричную орторомбическую мартенситную фазу [3]. Переход сплава из аустенитной в мартенситную фазу сопровождается появлением двойников мартенситиой фазы. Механическое воздействие в момент перехода через температуру перехода снимает вырождение между двойниками и вызывает макроскопическое изменение формы образца сплава в целом. Последующий нагрев выше Af возвращает фазовое состояние в кубическую, симметричную фазу. Двойники исчезают и образец возвращается к первоначальной форме. Этот эффект и получил название «односторонний эффект памяти формы». Например, для сплава Ti2NiCu характерные температуры начала и конца прямого и обратного мартенситного перехода равны, соответственно, Ms = 54, Mf = 52, As = 63, Af = 67°C. Таким образом, для этого сплава необходимый для проявления ЭПФ интервал температур нагрева/охлаждения составляет не менее Af - Mf = 13°С.
При применении нанопинцетов из предварительно напряженных биметаллических композитов с ЭПФ [1] интервал температур нагрева/охлаждения для обратимого срабатывания нанопницета - еще выше, так как при внешней механической нагрузке интервал фазового термоупругого перехода расширяется. Пример практической конструкции композитного нанопинцета с ЭПФ показан на фиг.1.
В прототипе, схематически изображенном на фиг.2, нагрев, необходимый для активации нанопинцета, установленного на кончике микропроволоки (1), которой придана форма конуса (2) осуществляется с помощью точно контролируемого изменения величины электрического тока, протекающего через резистивный элемент (3), закрепленный с помощью теплопроводящего клея вблизи конца микропроволоки с нанопинцетом (4). Охлаждение для восстановления формы микроинструмента осуществляется за счет теплоотвода из микропроволоки в массивные элементы системы нанопозиционирования, которые находятся при комнатной температуре.
Конструкция системы подогрева согласно предлагаемому техническому решению показана на фиг.3. Простая коническая форма согласно прототипу изменена на более сложную: цилиндрическая проволока (1) посредством участка (5) в форме усеченного конуса, переходит в участок циллиндрической формы меньшего диаметра (6), чем проволока у ее основания (1). Затем этот участок переходит в конический (7), на конце которого закреплен нанопинцет (4).
В предлагаемой схеме устройства резистивный нагреватель размещен на циллиндре меньшего радиуса (6), вблизи конуса (7) с нанопинцетом (4) на конце. На резистивный элемент (3) с помощью системы контроля подаваемого на него электрического тока устанавливается такое значение величины электрического тока, которое обеспечивает нелинейное стационарное распределение температуры в микропроволоке, при котором на конце конуса фиксируется температура Т > Af для сжатия нанопинцета и Т < Mf для восстановления формы и раскрытия нанопинцета. Внешний вид экспериментального образца системы управления в оптический микроскоп показан на фиг.4. Видно, что роль двух контактных проводников, необходимых для подключения нагревателя 7 к источнику тока, выполняет сама проволока (1) и изолированный проводник (8). Фото на фиг.5, выполненное в сканирующем электронном микроскопе, демонстрирует нанопинцет с ЭПФ (4), закрепленный методом фокусированного ионного пучка (ФИГ!) непосредственно на острие микропроволоки.
В предлагаемом техническом решении путем подбора оптимальной геометрии конца микропроволоки удалось существенно снизить тепловой дрейф и мощность резистивного нагревательного элемента, необходимую для достижения требуемой температуры микроинструмента с ЭПФ (4). Достижение цели изобретения доказано теоретически и экспериментально. Результаты численных расчетов проиллюстрированы на графиках, представленных на фиг.6-9, где показано семейство графиков температуры в сечении микропроволоки в зависимости от координаты и времени для случаев, когда длина микропроволоки L = 40 мм, диаметр поперечного сечения микропроволоки D = 0.5 мм, длина усеченного конуса а = 0.5 мм, диаметр узкого цилиндрического участка микропроволоки d = 200, 100 и 50 мкм, длина узкого цилиндрического участка 1 = 6.5 мм, длина конического кончика микропроволоки b = 1 мм и диаметр острия этого конуса dend = 1 мкм, а основание поддерживается при комнатной температуре 295 К (см. обозначения принятых в расчетной модели величин на фиг.7). Из фиг.6 видно, что основное изменение температуры сконцентрировано в коротком, узком участке проволоки. Этот эффект обусловил результат, показанный на фиг.8 графиком зависимости результирующего теплового дрейфа микропроволоки (1) с нанопинцетом (4) в зависимости от времени для различных значений диаметра узкой цилиндрической части (d) микропроволоки. Уменьшение параметра d приводит к резкому уменьшению теплового дрейфа при одних и тех же заданных температурах сжатия (Т = 65°С) и раскрытия (Т = 40°С) нанопинцета.
Фиг. 9 демонстрирует график, на котором в зависимости от диаметра цилиндрического участка d отложен тепловой дрейф (погрешность наноманипулирования), имеющий место в диапазоне температур 40-65°С согласно прототипу и согласно предложенному техническому решению. Показано существенное преимущество по сравнению с прототипом (простой конический кончик иглы).
Технический эффект от применения предлагаемого решения может заключаться, в повышении эффективности процесса манипулирования микро- и нанообъектами за счет повышения качества, удобства, скорости и точности перемещения индивидуальных нанообъектов, а также повышение эффективности и расширении функциональных возможностей устройства и повышении технологичности, за счет снижение энергопотребления и повышения скорости процесса манипулирования при сохранении совместимости с большим количеством известных систем наблюдения микро- и нанообъектов, такими как электронные и ионные микроскопы.
Пример 1. В качестве конкретного примера реализации предлагаемого технического решения рассмотрим систему управления микромеханическим устройством с ЭПФ для манипулирования микро- и нанообъектами согласно прототипу, фото которого представлено на фиг.1. Микропинцет изготовлен методом ионно-селективного травления (ФИП) в установке FEI-Strata 201 FIB. Микропинцет выполнен из быстрозакаленной ленты сплава с памятью формы Ti2NiCu толщиной 30 мкм, шириной 3 мм. Температуры начала и конца прямого, и обратного мартенситного перехода Ms = 54, Mf = 52, As = 63, Af = 67 С. Ленту псевдопластически растягивали, нагружая весом около 10 Н, при охлаждении от 80°С до комнатной температуры, а затем помещали в установку ионного травления фирмы FEI "Strata 200". На ленте формировали ножку пинцета, зазор и захват объекта, как показано на фиг.1. Затем наносили слой упругого металла - платины толщиной 700 им, в этой же установке. После изготовления нанопинцет укрепляли методом ионно-стимулированного осаждения платины в той же установке к кончику вольфрамовой микропроволоки (1), заточенной электрохимическим способом. Микропроволока погружается в водный раствор КОН на 1 см. Через микропроворолоку пропускается постоянный электрический ток 0.6 А в течении 1.5 минут, затем проволока плавно извлекается из раствора, не выключая ток. Во всех случаях полученный травлением кончик вольфрамовой микропроволоки имел коническую форму, однако согласно прототипу (см. фиг.2), конус (2) имеет в основании толщину проволоки - 0,5 мм, а в случае предлагаемого техническою решения конфигурация кончика имеет участок усеченного конуса (5), циллиндрическую часть толщиной менее толщины проволоки (6), и коническую часть (7). Вблизи конической части (7) закреплен теплоповодящим клеем нагреватель (3). В качестве нагревателя использован бескорпусной кремниевый диод. На фиг.10 показан тепловой дрейф при срабатывании нанопинцета по прототипу, который равен Δх = 6,5 мкм, при этом величина мощности, необходимой для закрытия и открытия нанопинцета, составляет P1 = 18 мВт и Р2 = 30 мВт, соответственно, или в перерасчете на силу тока, подаваемую на резистивный нагреватель, используя формулу I = P/U, где U падение напряжения на диоде равное 0.6 В, 30 мА и 50 мА соответственно. На фиг.11 показан тепловой дрейф при срабатывании нанопинцета по предлагаемому решению при d = 100 мкм, Δх = 1,2 мкм, P1 = 6.8 мВт, Р2 = 11 мВт, соответственно, или в перерасчете на силу тока, подаваемую на резистивный нагреватель, используя формулу I=P/U, где U падение напряжения на диоде равное 0.6 В, тогда I1 = 11.3 мА и I2 = 18.3 мА соответственно.
Пример 2. То же, что и в примере 1, но толщина цилиндрической части кончика вольфрамовой иглы составляет 50 мкм. На фиг.11 показан дрейф при срабатывании нанопинцета по предлагаемому решению при d = 50 мкм, Δх = 286 нм, P1 = 2.03 мВт, Р2 = 3.3 мВт, соответственно, или в перерасчете на силу тока, подаваемую на резистивный нагреватель, используя формулу I=P/U, где U падение напряжения на диоде равное 0.6 В, тогда I1 = 3.4 мА и I2 = 5.5 мА соответственно.
Пример 3. То же, что и в примерах 2, но проволока выполнена из сплава инвар. Так как вольфрам имеет коэффициент линейного теплового расширения равный 4.5⋅10-6 (1/К), а коэффициент теплового расширения инвара ~1,2⋅10-6/°С в интервале температур от -20 до 100°С, у очень чистого сплава 36Н (с содержанием кобальта менее 0,1%) коэффициент теплового расширения еще меньше 0,62 - 0,65⋅10-6/°С, то использование инвара в качестве материала микропроволоки снижает тепловой дрейф в 4-7 раз, до 72 и 40 нм соответственно, по сравнению с примером 2.
ЛИТЕРАТУРА
1. Афонина B.C., Захаров Д.И., Иржак А.В., Коледов В.В., Лега П.В., Маширов А.В., Пихгин Н.А., Ситников Н.Н., Тарасов И.С, Шавров В.Г., Шеляков А.В. Микромеханическое устройство, способ его изготовления и система манипулирования микро- и нанообъектами. Патент №2458002, подача заявки: 05.08.2010, публикация патента: 10.08.2012.
2. Лега П.В. Орлов А.П., Фролов А.В., Жихарев A.M.. Кучин Д.С, Иржак А.В., Коледов В.В., Шеляков А.В. Устройство для манипулирования микро- и нанообъектами, способ его изготовления и система управления. Патент РФ №2 698 570. Дата подачи заявки: 26.06.2018. Опубликовано: 28.08.2019 Бюл. №25.
3. P.L. Potapov, A.V. Shelyakov, D. Schryvers. On the crystal structure of Ti-Ni-C martensite. Scripta mater. 44 (2001) 1-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| Система управления устройством с эффектом памяти формы для манипулирования микро- и нанообъектами | 2022 |
|
RU2790934C1 |
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА С ОБРАТИМОЙ ПАМЯТЬЮ ФОРМЫ ИЗ КВАЗИБИНАРНОГО СПЛАВА ИНТЕРМЕТАЛЛИЧЕСКОЙ СИСТЕМЫ TiNi-TiCu (ВАРИАНТЫ) | 2016 |
|
RU2692711C1 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| АВТОНОМНАЯ ТЕРМОЗАПОРНАЯ КЛАПАННАЯ СИСТЕМА | 2022 |
|
RU2794019C1 |


Изобретение относится к системе управления устройством с ЭПФ для манипулирования микро- и нанообъектами. Система содержит микропроволоку с основанием и концом, выполненным коническим и заточенным путем электрохимического травления, на котором закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, рабочее поле с манипулируемым объектом и источник подогрева, при этом основание микропроволоки укреплено на нанопозиционере, причем источник подогрева выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте с микропроволокой, и электронную систему питания и управления током, протекающим через резистивный элемент, подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током, причем конец микропроволоки выполнен с переменным профилем в виде комбинации геометрических фигур - усеченного конуса, цилиндра с диаметром меньшим, чем диаметр основания проволоки, и конуса, на острие которого закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, а нагревательный элемент расположен на поверхности цилиндра с меньшим диаметром. Технический результат заключается в повышении качества и технологичности процесса наноманипулирования за счет минимизации теплового дрейфа устройства манипулирования (нанопинцета) при его термической активации, что приводит к уменьшению погрешности процесса манипулирования, а также снижению потребляемого тока и повышению его быстродействия и производительности в целом. 2 з.п. ф-лы, 3 пр., 12 ил.
1. Система управления устройством с эффектом памяти формы (ЭПФ) для манипулирования микро- и нанообъектами, содержащая микропроволоку с основанием и концом, выполненным коническим и заточенным путем электрохимического травления, на котором закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, рабочее поле с манипулируемым объектом и источник подогрева, при этом основание микропроволоки укреплено на нанопозиционере, причем источник подогрева выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте с микропроволокой, и электронную систему питания и управления током, протекающим через резистивный элемент, подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током, отличающаяся тем, что конец микропроволоки выполнен с переменным профилем в виде комбинации геометрических фигур - усеченного конуса, цилиндра с диаметром меньшим, чем диаметр основания проволоки, и конуса, на острие которого закреплено устройство с ЭПФ для манипулирования микро- и нанообъектами, причем нагревательный элемент расположен на поверхности цилиндра с меньшим диаметром.
2. Система управления по п.1, отличающаяся тем, что цилиндр имеет диаметр, преимущественно в 5-10 раз меньше, чем микропроволока у ее основания.
3. Система управления по п.2, отличающаяся тем, что проволока выполнена из сплава инвар.
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| В | |||
| С | |||
| АФОНИНА и др | |||
| Двухслойный композит на основе материала с эффектом памяти формы, полученный при помощи направленной аморфизации ионным пучком | |||
| ИРЭ им | |||
| В.А | |||
| Котельникова РАН, Журнал радиоэлектроники, N1, 2015 | |||
| CN 110407154 A, 05.11.2019 | |||
| JP 2001170900 A, 26.06.2001 | |||
| JP 7164370 A, 27.06.1995. | |||

