Изобретение относится к области приборостроения, микросистемной техники и наномеханики, в частности, к технике устройств на основе материалов с эффектом памяти формы и может найти применение в радиоэлектронике, машиностроении, нанотехнологии, электронной микроскопии, медицине, биологии.
Известен аналог предлагаемого технического решения, представленный в статье [1], в которой описано микромеханическое устройство для захвата микрообъектов (микропинцет), способ его изготовления, и система управления микропинцетом микро- и нанообъектами на его основе. Микромеханическое устройство выполнено в виде двух плоских элементов, из которых, по крайней мере один выполнен двуслойным и термочувствительным и состоит двух слоев материалов, из которых один изготовлен в виде сплава с эффектом памяти формы (из сплава Ti-Ni-Cu), а другой упругий (из кремния), причем плоские элементы прочно соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования. Вся конструкция укреплена на конце микропроволоки со стороны соединения элементов, для удобства приближения к захватываемому объекту. Для достижения раскрывания пинцета при нагреве слой с памятью формы расположен с внешней стороны микропинцета. Микропинцет приводится в действие нагревом всей конструкции от внешнего источника, до температуры мартенситного фазового структурного превращения сплава с эффектом памяти формы, который переводит слой материала с эффектом памяти формы из мартенситного состояния, в котором он находится при комнатной температуре в аустенитное, что и вызывает его деформация.
Способ изготовления этого микромеханического устройства предполагает проведение операции магнетронного напыления слоя с эффектом памяти формы (сплав Ti-Ni-Cu) на упругий слой (кремний) при температуре около 500 С. В результате, при охлаждении, в контакте двух слов: слоя с эффектом памяти формы и упругого (кремний -Ti-Ni-Cu) возникают механические напряжения, которые релаксируют при охлаждении элемента до температуры перехода аустенит - мартенсит (около 40 С) и двуслойный термочувствительный элемент является прямолинейным при комнатной температуре. Нагрев элемента выше точки перехода мартенсит - аустенит приводит к фазовому мартенситному переходу, который переводит слой с памятью формы в аустенитное состояние и в нем возникают механические напряжения, которые изгибают двуслойный элемент, в результате чего микропинцет раскрывается, а при повторном охлаждении он опять закрывается, и таким образом достигается многократное управляемое срабатывание микропинцета.
Недостатком данного технического решения - аналога является низкая эффективность, которая выражается в невысокой достигаемой изгибной деформации исполнительно элемента, приводящая к тому, что данное микромеханическое устройство невозможно изготовить достаточно малым по габаритным размерам (порядка микрометров) и, соответственно, с его помощью невозможно манипулировать малыми микро- и нанообъектами. (В работе [1] сообщается, что размер аналога - 1 мм), а также низкое быстродействие и высокая потребляемая мощность.
Известен также аналог предлагаемого технического решения, который описан в статье [2]. В этой статье представлено микромеханическое устройство и метод его изготовления. Микромеханическое устройство выполнено в виде П-образной секции с обратным П-образным элементом на конце, а также дополнительными зажимами в виде узких лент.
Способ изготовления микромеханического устройства включает операции изготовления пленки с эффектом памяти формы из сплава Ti-Ni методом магнетронного напыления на кремниевую подложку, которая впоследствии подвергалось жидкостному химическому травлению по заданному шаблону раствором HF-HNO3. После отделения активной части микромеханического устройства от кремниевой подложки, оно подвергалось термомеханической обработке для «запоминания» формы, необходимой для захвата и надежного удержания микрообъекта. Впоследствии устройство подвергалось деформации при температурах ниже мартенсит-аустенитного перехода для придания ему удобной формы для помещения микрообъекта между элементами захвата. Срабатывание микромеханического устройства обусловлено возвращением к «запомненной» форме вследствие мартенсит-аустенитного фазового перехода, возникающего в результате нагрева микромеханического устройства протекающим по нему электрическим током. Таким образом, достигался захват и надежное удержание микрообъекта. Вследствие отсутствия упругих слоев и отсутствия тренировки на двухстороннюю память формы данное техническое решение предусматривает только одноразовое использование.
Недостатком данного технического решения является невозможность многоразового использования зажима и сложность проведения термомеханической обработки для «запоминания» необходимой формы, что обуславливает довольно большие габаритные размеры микромеханического устройства (в работе [2] сообщается, что габаритные размеры аналога были 720×480 микрометров) и, соответственно, с его помощью невозможно манипулировать малыми микро- и нанообъектами. В работе [2] сообщается, что микромеханическое устройство использовано для зажима нервного ствола, насекомого имеющего диаметр 100 микрон.
Известен аналог предлагаемого технического решения, представленный в статье [3], в которой описано микромеханическое устройство для захвата микрообъектов (микропинцет), способ его изготовления, и система для манипулирования микро- и нанообъектами на его основе. Упругий элемент имел форму двойной U-образной конструкции, центральная часть которой имела площадку для жесткого крепления к столику при помощи эпоксидного клея. Активный элемент в виде П-образной пленки крепится к упругому элементу посредством эпоксидного клея таким образом, что поперечная часть оказывается связанной с жестко зафиксированным выступом упругого элемента, а «рукава» фиксируются на нижней части U-образного элемента. Прикрепление активного элемента с ЭПФ производится при нахождении упругого элемента в замкнутом состоянии.
Упругий элемент микромеханического устройства из полимерного фоторезиста SU-8 изготавливался методами химического осаждения из газовой фазы и жидкостного химического травления и впоследствии подвергался термообработке и облучению ультрафиолетом. В статье [3] было предложено два способа изготовления активного элемента из сплава Ti-Ni с эффектом памяти формы. В первом способе в ходе многоступенчатого напыления различных типов фоторезистов и пленок Ti и Ti-Ni была получена структура из никелида титана, которая впоследствии подвергалась отжигу для «запоминания» необходимой формы. Во втором случае был использован модифицированный метод напыления сплава Ti-Ni, и полученная в результате пленка после кристаллизации не подвергалась никаким термическим обработкам, но впоследствии демонстрировала двухстороннюю память формы, что объясняется наличием внутренних напряжений, возникших в процессе изготовление пленки. В обоих способах использовались методы ионно-стимулированного осаждения из газовой фазы, магнетронного напыления и жидкостного химического травления.
При прохождении электрического через П-образную пленку Ti-Ni с ЭПФ происходит сжатие продольных элементов, что обуславливает открытие микромеханического устройства.
Недостатком данного технического решения является сложность и многоступенчатость процессов изготовления упругого и активного элементов, а также значительные размеры полученного микромеханического устройства, составляющие порядка 20 мм.
Известен также аналог, представленный в статье [4]. В этой статье описывается микромеханическое устройство, способ его изготовления и система позиционирования и управления. Упругий элемент микромеханического устройства изготавливается из полимера, усиленного волокном. В качестве активного элемента используются коммерчески доступные пружины из сплава с эффектом памяти формы - TiNi. Активный элемент помещается в специально подготовленные в теле упругого элемента канавки, а его края закрепляются в отверстиях. В качестве удерживающего элемента использовались вольфрамовые иглы, заточенные методом катодного электрохимического травления и помещенные в прецизионно просверленные отверстия подвижной части упругого элемента.
Срабатывание микромеханического устройства обусловлено сокращением активного элемента при нагреве за счет протекающего по нему электрического тока, что таким образом вызывает деформацию упругого элемента. При отключении электрического тока устройство открывается за счет сил упругой деформации элементов микромеханического устройства. Для позиционирования микромеханического устройства в камере электронного микроскопа применялось три пикомотора, отвечающих за передвижения по соответствующим осям. Как было продемонстрировано в статье [4] описанное микромеханическое устройство позволяет выполнять основные задачи манипулирования.
Недостатком данного технического решения является сложность процесса изготовления, большие линейные размеры устройства (порядка 20 мм), низкая скорость срабатывания.
Прототипом предлагаемого технического решения является микромеханическое устройство, способ его изготовления и система манипулирования микро- и нанообъектами, представленное в патенте [5].
Микромеханическое устройство для захвата и манипулирования микро и нанообъектов (нанопинцет), согласно прототипа, включает два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из предварительно псевдопластически растянутого сплава с ЭПФ, а другой из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, причем в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с эффектом памяти формы с внешней стороны устройства, а захват для удержания объекта сформирован в сплаве с памятью формы. Для достижения раскрытия нанопинцета при нагреве, упругий слой расположен с внутренней стороны микропинцета.
Способ изготовления устройства для захвата и манипулирования микро и нанообъектов (нанопинцет), согласно прототипа, включает операцию изготовления слоя материала с эффектом памяти формы с псевдопластической деформацией растяжения, изготовление слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, причем предварительно производят операцию формирования слоя с эффектом памяти формы и внесения в него деформации псевдопластического растяжения, а затем операции создания упругого слоя и соединения слов для получения термочувствительного элемента, проводят путем напыления на поверхность слоя сплава с эффектом памяти формы слоя упругого материала, а затем формируют захват манипулируемого объекта на слое с эффектом памяти формы, при этом операцию нанесения упругого слоя производят при температуре материала с эффектом памяти формы ниже температуры переход мартенсит - аустенит сплава.
Система манипулирования микрообъектами на основе микромеханического устройства, согласно прототипа, включает микромеханическое устройство, закрепленное на конце микропроволоки, рабочее поле с манипулируемым объектом и источник подогрева, причем другой конец микропроволоки укреплен на нанопозиционере, а система подогрева выполнена в виде лазерного источника нагрева, состоящего из полупроводникового инжекционного лазера с оптической системой фокусировки его излучения на рабочем поле системы манипулирования, включая конец микропроволоки с микропинцетом.
Цель предполагаемого изобретения заключается в повышении качества и производительности процесса манипулирования микро- и нанообъектами, в расширении возможностей интеграции предлагаемой системы манипулирования микро- и нанообъектами с существующими системами наблюдения, исследования и наноманипулирования, такими, как сканирующие электронные и ионные микроскопы, нанопозиционеры и наноманипуляторы, в повышении технологичности процессов производства и установки устройства, расширении его функциональных возможностей в рамках выполняемых задач, увеличении быстродействия и эффективности, повышении эффективности, экономичности, компактности и удобства в эксплуатации системы управления.
Поставленные цели достигаются тем, что устройство для манипулирования микро и нанообъектами, включающее два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из предварительно псевдопластически растянутого сплава с ЭПФ, а другой из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, причем в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с эффектом памяти формы с внешней стороны устройства, а захват для удержания объекта сформирован в сплаве с памятью формы, дополнительно содержит защитный слой диэлектрического прочного материала, нанесенный на рабочие поверхности микромеханического устройства.
Поставленные цели достигаются тем, что защитный слой выполнен из оксида гафния.
Поставленные цели достигаются тем, что защитный слой выполнен из оксида алюминия.
Поставленные цели достигаются тем, что защитный слой выполнен из оксида олова.
Поставленные цели также достигаются тем, что толщина защитного слоя составляет преимущественно от 10-100 нанометров.
В части способа изготовления устройства для манипулирования микро и нанообъектами, предлагаемое техническое решение, включающее операцию изготовления слоя материала с эффектом памяти формы с псевдопластической деформацией растяжения, изготовление слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, причем предварительно производят операцию формирования слоя с эффектом памяти формы и внесения в него деформации псевдопластического растяжения, а затем операции создания упругого слоя и соединения слов для получения термочувствительного элемента, проводят путем напыления на поверхность слоя сплава с эффектом памяти формы слоя упругого материала, а затем формируют захват манипулируемого объекта на слое с эффектом памяти формы, при этом операцию нанесения упругого слоя производят при температуре материала с эффектом памяти формы ниже температуры переход мартенсит - аустенит сплава, дополнительно включает операцию нанесения на рабочую поверхность микромеханического устройства защитного слоя из диэлектрического материала.
Поставленные цели также достигаются тем, что защитный слой из диэлектрического материала наносят методом атомно-слоевого осаждения.
Система управления устройством для манипулирования микро и нанообъектами, согласно предлагаемому техническому решению, включает микропроволоку, на одном конце которой, закреплено устройством для манипулирования микро и нанообъектами, а также рабочее поле с манипулируемым объектом и источник подогрева, причем другой конец микропроволоки укреплен на нанопозиционере, а источник подогрева, выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте вблизи конца микропроволоки, и электронную систему питания и управления током, протекающим через резистивный элемент, а также подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током.
Поставленные цели достигаются также тем, что в качестве материала микропроволоки выбран инвар.
Поставленные цели достигаются также тем, что в качестве материала микропроволоки выбран вольфрам.
Поставленные цели достигаются также тем, что конец микропроволоки выполнен коническим, заточка которого осуществляется методами электрохимического травления.
Поставленные цели достигаются тем, что нагревательный резистивный элемент выполнен в виде малоразмерного резистора.
Поставленные цели достигаются также тем, что нагревательный резистивный элемент выполнен в виде малоразмерного полупроводникового диода.
Поставленные цели достигаются также тем, что нагревательный резистивный элемент выполнен в виде малоразмерной диодной сборки, состоящей из двух полупроводниковых диодов.
Поставленные цели достигаются также тем, что электронная система питания и управления током, протекающим через резистивный нагревающий элемент, содержит электронный блок для поддержания температуры кончика иглы с закрепленным устройством захвата микрообъектов во включенном состоянии при заранее заданной температуре выше температуры перехода мартенсит - аустенит сплава с эффектом памяти формы, а в выключенном состоянии ниже перехода мартенсит - аустенит сплава с эффектом памяти формы.
Поставленные цели достигаются также тем, что электронная система питания и управления током резистивного элемента выполнена в виде электронного блока под управлением ЭВМ и работающего в импульсном периодическом режиме, причем в промежутке между импульсами управляющего тока через малоразмерный диод осуществляется измерение температуры путем измерения падения напряжения на малоразмерном диоде, а в течение импульса подается скорректированное значение тока для нагрева диода.
Поставленные цели достигаются также тем, что система управления устройством для манипулирования микро и нанообъектами содержит микропроволоку, с концом которой в тепловом контакте размещен резистивный элемент нагрева в виде диодной сборки, состоящей из двух диодов, а электронный блок под управлением ЭВМ измеряет температуру кончика иглы путем регистрации падения напряжения на первом диоде и подает на второй диод скорректированный сигнал электрического тока для его нагрева до заранее заданной температуры: во включенном состоянии - выше температуры перехода мартенсит - аустенит сплава с эффектом памяти формы, а в выключенном состоянии - ниже температуры перехода аустенит - мартенсит сплава с эффектом памяти формы для осуществления контроля срабатывания устройства манипулирования в режиме реального времени.
В дальнейшем предлагаемое техническое решение поясняется в связи с рисунками.
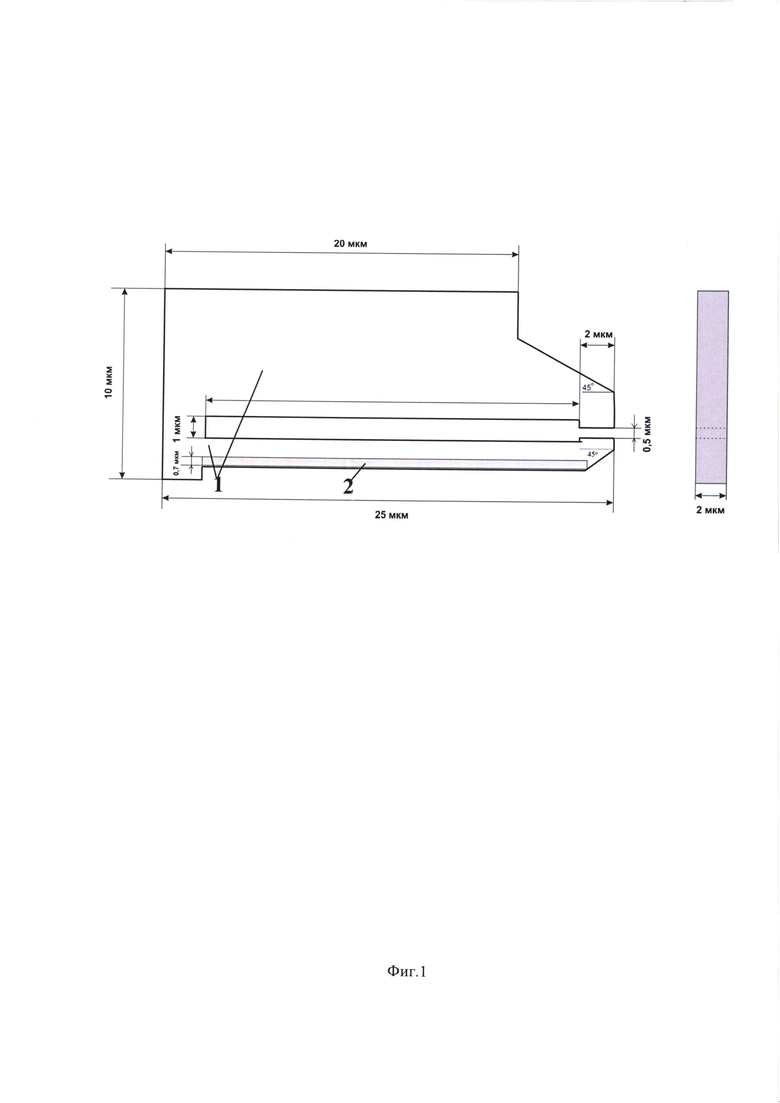
На фиг. 1 показан чертеж устройства для манипулирования микро и нанообъектами (нанопинцета) с ЭПФ.
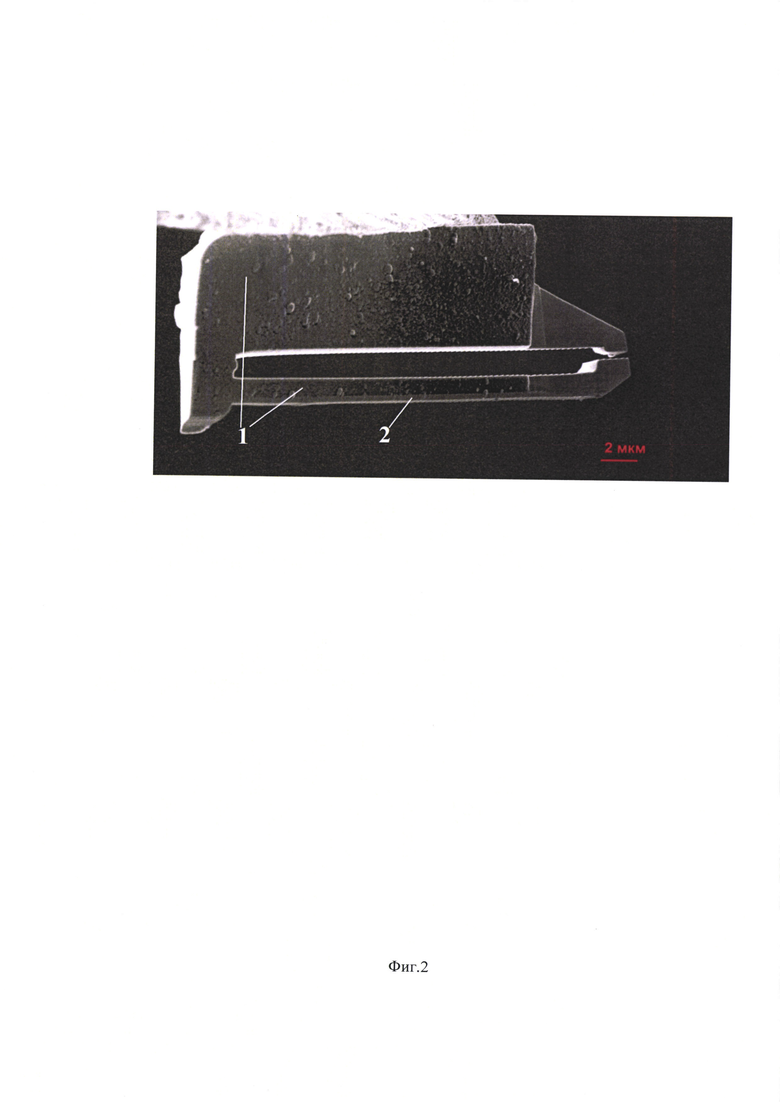
На фиг. 2 показана микрофотография, выполненная в сканирующем электронном микроскопе, демонстрирующая общий вид устройства для манипулирования микро и нанообъектами (нанопинцета) с ЭПФ согласно чертежу, на фиг. 1.
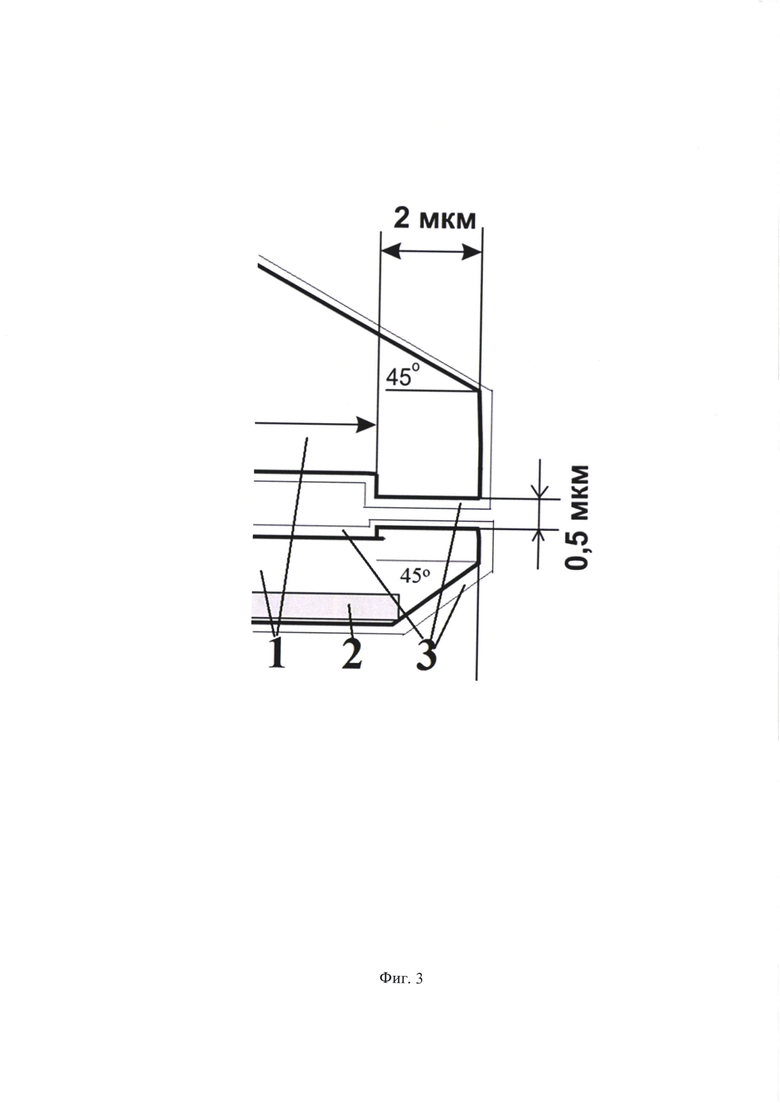
На фиг. 3 показана схема слоев на поверхности композита с эффектом памяти формы согласно предлагаемому техническому решению.
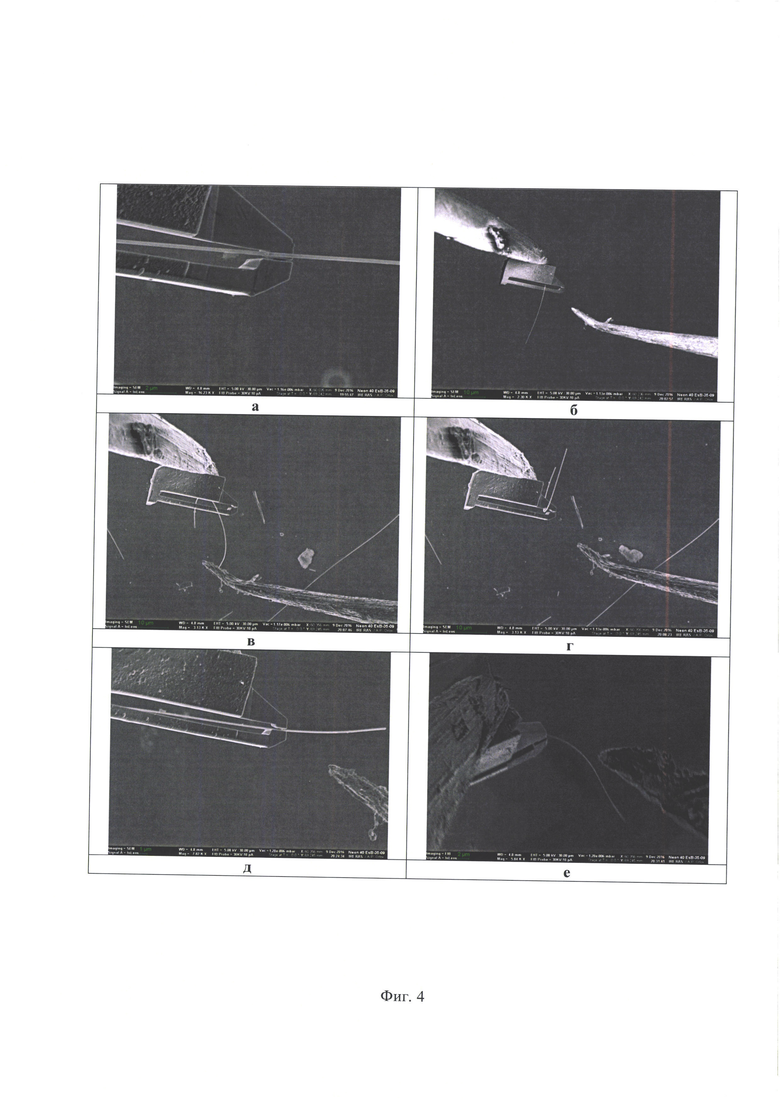
На фиг. 4 показана микрофотография нанопинцета согласно прототипу (без защитного диэлектрического слоя), на котором поверхностными силами удерживается нанобъект - углеродная нанотрубка.
На фиг. 5 показана схема узла системы управления микромеханического устройства, включающего микропроволоку с резистивным нагревательным элементом, расположенным в тепловом контакте вблизи ее кончика и с нанопинцетом на конце.
На фиг. 6 показана фотография микропроволоки с резистивным нагревательным элементом, расположенным в тепловом контакте вблизи ее кончика и с нанопинцетом на конце.
На фиг. 7 представлена электрическая схема системы питания и управления резистивным нагревательным элементом.
На фиг. 8 показана электрическая схема импульсного блока для автоматического поддержания температуры конца микропроволоки.
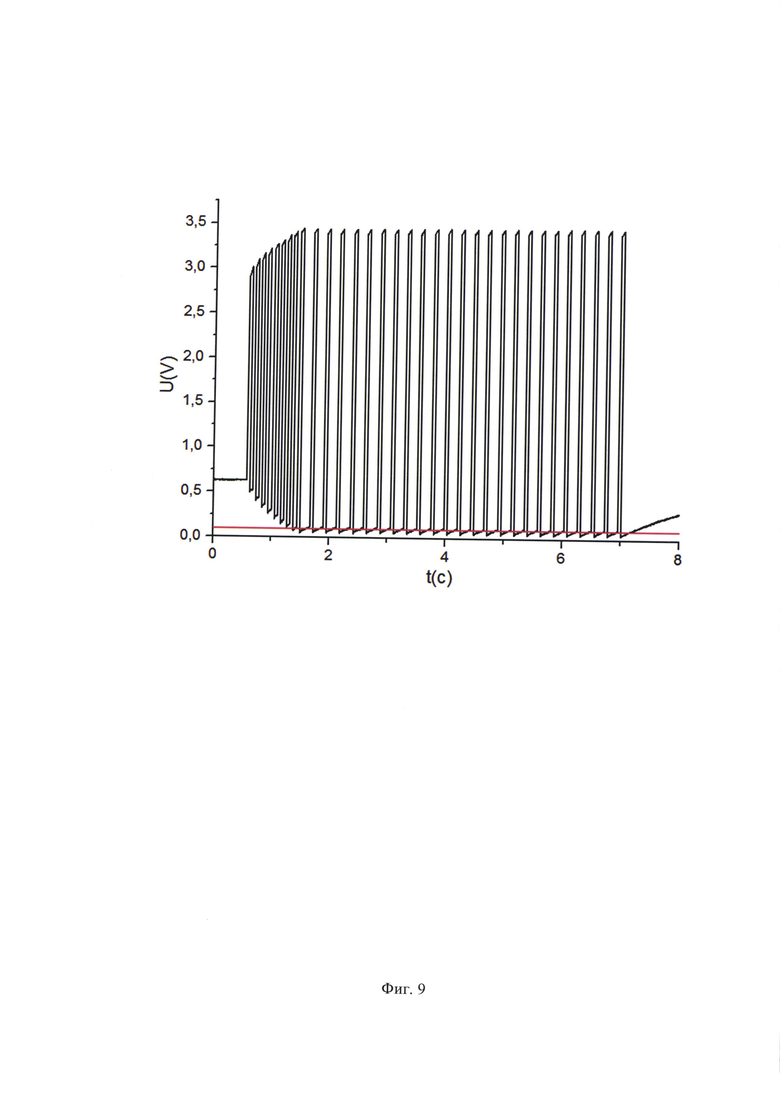
На фиг. 9 показана временная диаграмма напряжения на диоде, укрепленном в тепловом контакте с микропроволокой, иллюстрирующая работу блока управления при поддержании постоянной температуры конца микропроволоки и нанопинцета в импульсном режиме, при котором для измерения и нагрева используется один т тот же диод.
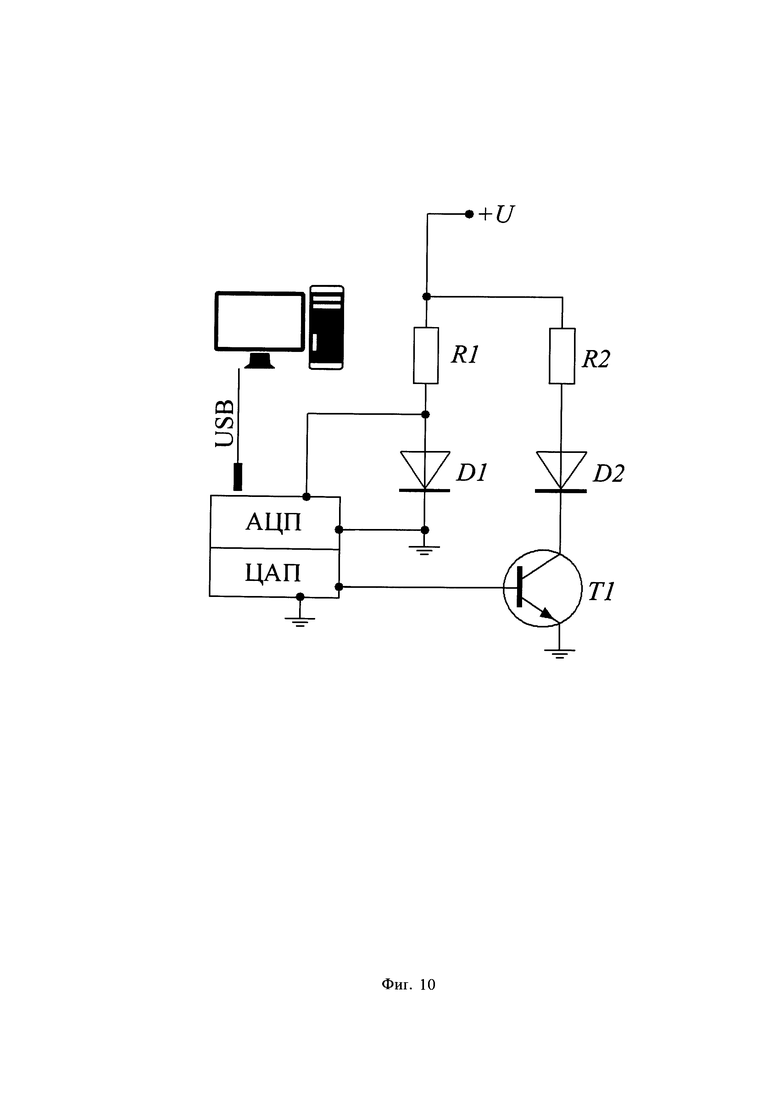
На фиг. 10 показана принципиальная схема устройства для питания и управления элементов резистивного нагрева в аналоговом режиме, при котором для измерения температуры и нагрева используются два различных диода.
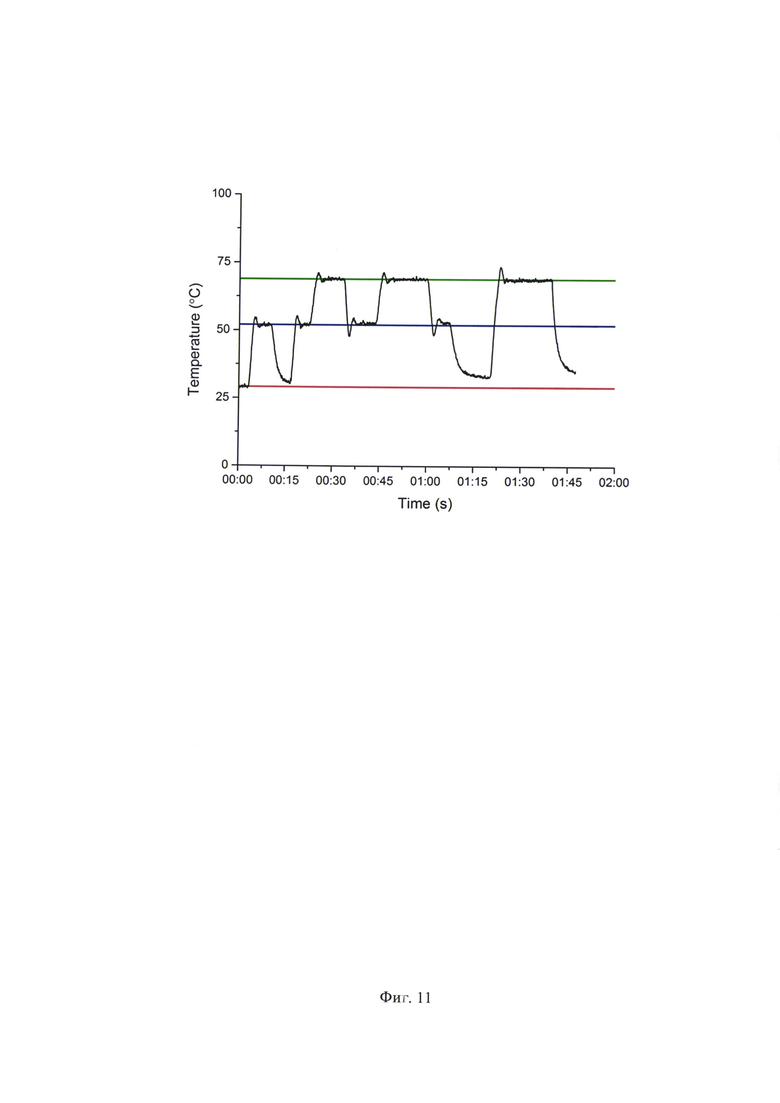
На фиг. 11 показана временная диаграмма эксперимента по испытанию системы управления микромеханическим устройством в аналоговом режиме, при котором для измерения температуры и нагрева используются два различных диода.
Новым в предложенном техническом решении, по сравнению с известным, является то, что рабочий участок поверхности микромеханического устройства, то есть та площадь его поверхности, которая может соприкасаться с манипулируемыми нанообъектами покрывается защитным диэлектрическим слоем, который позволяет снизить притяжение и залипание нанообъектов к его поверхности и повысить качество, удобство и точность манипулирования нанообъектами, а также то, что микромеханическое устройство размещено на вольфрамовой игле с малоразмерным нагревательным элементом в виде резистора, диода или диодной сборки. Это обеспечивающие удобство при монтаже микромеханического устройства в вакуумной камере сканирующего микроскопа, при этом микропроволока легко крепится на стандартных нанопозиционерах, а система управления подогревом микропроволоки связана с резистивным элементом по проводам, то есть наиболее простым и технологичным способом. Предусмотрено, что резистивные элементы могут выполнять две функции - измерения и контроль температуры кончика иглы в реальном времени с помощью цепи обратной связи.
Рассмотрим физические принципы работы предлагаемого технического решения и сравним достигаемый эффект с прототипом (см. фиг. 1, 2) и известными аналогами. В основе работы, как предлагаемого микромеханического устройства, так и прототипа лежит то, что изгибная деформация композитной пластины, есть сжатие на внутренней стороне и растяжение на внешней. Композитный термоуправляемый элемент состоит из слоя 1 элемента с эффектом памяти формы и слоя 2 упругого материала (например, металла) (см. фиг. 1). Сплав с эффектом памяти формы предварительно псевдопластически растягивают до достижения возвратимой деформации растяжения. Последующие операции по изготовлению микромеханического устройства производят при температуре ниже температуры перехода аустенит-мартенсит сплава с эффектом памяти формы.
Физическое объяснение состояния "возвратимой деформации" и «псевдопластической» деформации можно понять из следующего рассуждения. Под действием достаточно сильного внешнего напряжения, температура структурного (мартенситного) перехода аустенит - мартенсит повышается сплава с эффектом памяти формы повышается. В напряженном образце, при охлаждении из аустенитного состояния через точку фазового перехода, происходит генерация мартенсита. Она начнется в первую очередь в областях максимального напряжения. Будут генерироваться главным образом соответственно ориентированные варианты мартенсита (растянутые или сжатые по осям растяжения или сжатия). Таким образом «возвратимая деформация» - это состояние образца, в котором макроскопическое изменение его формы и/или размера достигнуто в мартенситном состоянии за счет генерации мартенситных вариантов с соответствующими ориентациями кристаллографических осей [6, 7]. Величина обратимой деформации может быть очень значительной - до 10%, существенно превышая предел прочности большинства известных металлов и сплавов. За это ее часто именуют «псевдопластической».
При последующем нагреве материал с эффектом памяти формы переходит в аустенитное состояние и возвращается к прежней форме и размеру - то есть сжимается. Это приведет к сильной изгибной деформации композитного актюатора. Обычно односторонний эффект памяти формы приводит к однократному восстановлению формы, несмотря на периодический нагрев/охлаждение, за что и получил свое название. Актюатор, выполненный из композита, при повторном охлаждении после нагрева восстановит свою форму. Он сохранит способность к периодическому изгибу и выпрямлению при периодическом термоциклировании через мартенситный переход, несмотря на то, что использует односторонний эффект памяти формы. Это объясняется упругими свойствами второго элемента композита. Если композит охладить ниже температуры мартенситного перехода, то упругий слой, возвращаясь в ненапряженное состояние, деформирует элемент с памятью формы и снова натренирует его до достижения состояния возвратимой деформации. Таким образом, достигается рекордно большая относительная термоуправляемая обратимая изгибная деформация микро- и нанокомпозитов с эффектом памяти формы (до нескольких %). Это позволяет при заданном размере манипулируемого, захватываемого инструментом объекта, изготовить инструмент с минимальными габаритными размерами (см. фиг. 1 и 2).
Сущность предлагаемого технического решения в части устройства для манипулирования микро- и нанообъектов и способа его изготовления поясняется фиг. 3. После изготовления микромеханического устройства для манипулирования микро и нанообъектами на его поверхность наносят, например, методом атомного-слоевого нанесения (atomic layer deposition - ALD) тонкий порядка десятков нанометров слой 3 прочного диэлектрического материала [8]. Назначение этого слоя иллюстрирует серия фотографий, полученных в сканирующий электронный микроскоп фиг. 4 (а-е). На этих фотографиях представлены различные этапы экспериментов по манипулированию с помощью устройства - прототипа реальными нанообъектами: УНТ и нановискерами TaS3. В частности, видно, что объекты легко прилипают к рабочей поверхности инструмента - пинцета. В силу ничтожного веса этих объектов, однажды притянувшись и прилипнув, объекты с трудом отделяются, даже если не были зажаты механически в створе пинцета.
Таким образом «рабочей» поверхностью пинцета мы будем именовать не только внутреннюю поверхность створа пинцета, а всю поверхность инструмента, к которой может прикасаться объект, например, УНТ (см. Фиг. 3). В литературе хорошо известен метод атомно-слоевого осаждения (ALD), применяемый в частности для нанесения слоев диэлектриков - оксидов, например, для повышения коррозионной стойкости металлических деталей [9]. Однако, насколько известно авторам заявки, впервые предлагается использовать нанесение тонкого диэлектрического слоя для снижения силы притяжения между поверхностью металлического микроинструмента и манипулируемыми нанообъектами и для снижения вероятности случайного прилипания нанообъектов к рабочей поверхности нанопинцета. Это может свидетельствовать о достижении положительного эффекта - повышение удобства, точности, надежности и производительности манипулирования реальными микро, субмикро и нанообъектами, а также о выполнении критерия «изобретательский уровень».
Новой в предлагаемом техническом решении является и система управления. Рассмотрим ее принцип и особенности конструкции. А также достигаемый эффект при манипулировании реальными микро- и нанообъектами.
На фиг. 5 представлен схематически основной узел системы управления, который включает металлическую, например, вольфрамовую микропроволоку 4, заостренную с одного конца, причем на острие укреплено устройство для манипулирования нанообъектами (нанопинцет) 5. Вблизи кончика иголки в тепловом контакте с нею расположен резистивный нагревательный элемент 6, например, резистор, малоразмерный диод или диодная сборка, состоящая из 2-х диодов. Система включает также контактные площадки 7, расположенные на поддерживающем элементе 8 для монтажа соединительных проводов 9. Провода соединяют узел, находящийся в вакуумной камере электронного или ионного микроскопа и устройство его питания и управления, расположенное вне вакуумной камеры. На фиг. 5 показано 2 провода, однако, практическая схема может включать, как больше проводов, например, 3, так и всего 1 провод. В первом случае два диода могут выполнять раздельно 2 функции - измерения температуры и нагрева микропроволоки. Во втором случае, только один провод выводится из вакуумной камеры микроскопа, а для замыкания цепи питания резистивного нагревательного элемента 6 используется корпус микроскопа, в качестве общего провода. На схеме показан также цанговый держатель 10, который обычно входит в комплектацию систем микроманипулирования, таких, как Kliendiek, Zywex и других. Общий вид практической системы управления с нанопинцетом на конце проволоке показан на фото Фиг. 6.
В самом простом случае электронный блок питания и управления может быть выполнен по схеме, показанной на фиг. 7. Резистивный элемент 6 обозначен на принципиальной схеме D3. Назначение электронной схемы на фиг. 7 - осуществить во включенном состоянии (верхнее или нижнее положение переключателя S2) подачу одного из двух значений тока. В верхнем положении S2 - ток через диод 6 равен I1, он определяется положением движка потенциометра R1 и сопротивление R3. В нижнем положении S2, ток равен I2, он определяется положением движка потенциометра R2 и сопротивлением R3. Токи I1 и I2 определяют температуру конца проволоки, соответственно, выше окончания перехода мартенсит-аустенит или ниже окончания перехода аустенит-мартенсит сплава с эффектом памяти формы. Путем переключения ключа S2 достигается быстрое изменение тока от значения I1 к значению I2 для того, чтобы обеспечить сжатие-раскрытие нанопинцета. Такая простая схема не позволяет поддерживать ток в течение длительного эксперимента.
На фиг. 8 показана принципиальная схема электронного блока питания и управления, позволяющего поддерживать постоянной в автоматическом режиме температуру диода D1 на конце микропроволоки. Устройство включает компьютер и блок ЦАП/АЦП, подключенные к ключевой схеме на основе транзистора Т1.
Схема работает следующим образом. На временной оси выбирается интервал управления и измерения. В течение интервала измерения ключ Т1 открыт положительным напряжением с ЦАП, а падение напряжение на диоде D1 измеряется ФЦП. Ток через диод ограничен сопротивлениями R1 R2 вблизи 100 мкА. Компьютерная программа, обслуживающая ЦАП/АЦП либо откроет ключ Т1, либо не откроет на следующий полупериод рабочего интервала в зависимости от результатов сравнения измеренного падения напряжения на диоде D1 от заданного исходя из необходимой температуры диода выше температуры мартенситного перехода мартенсит - аустенит. Такая последовательность действий - измерения напряжения на диоде и подачи (не подачи) нагревающего тока на диод повторяется периодически, при включении системы управления. Чтобы изменить температуру в программу компьютера вносится корректива - измеряется значение константы с которой сравнивается напряжение на диоде.
На фиг. 9. Показана временная диаграмме эксперимента по поддержанию температуры микропроволоки постоянной и нанопинцета в сжатом положении без перегрева. Видно, что сразу после включения нагрева импульсы тока нагрева следуют в каждом интервале. При достижении заданной температуры частота импульсов снижается. Горизонтальная прямая - отвечает заданному значению напряжения через диод, которое отвечает сжатому пинцету.
На фиг. 10 показана принципиальная схема варианта блока питания и управления, которая поддерживает температуру кончика иголки в непрерывном режиме. Для нагрева и измерения используются два различных диода D1 и D2. Временная диаграмма работы блока питания и управления резистивного нагревателя в непрерывном режиме показана на фиг. 11. На графике показана температура конца иголки, которая измеряется путем измерения напряжения на диоде D1. Горизонтальная красная прямая на временной диаграмме эксперимента - комнатная температура. Синяя прямая - нанопинцет разомкнут. Температура диода составляет около 50 С (ниже температуры перехода аустенит-мартенсит). Зеленая прямая - нанопинцет замкнут. Температура диода - 67 С (выше температуры мартенсит-аустенит сплава с эффектом памяти формы).
Технический эффект от применения предлагаемого решения может заключаться, в повышении эффективности процесса манипулирования микро и нанообъектами за счет повышения качества, удобства и точности перемещения индивидуальных нанообъектов, а также повышение эффективности и расширении функциональных возможностей устройства и повышении технологичности, за счет снижение габаритов устройства и совместимости с большим количеством известных систем наблюдения микро и нанообъектов, такими как электронные и ионные микроскопы.
Пример 1. В качестве конкретного примера реализации микромеханического устройства для манипулирования микро- и нанообъектами и способа его изготовления, рассмотрим микропинцет, изготовленный согласно чертежу, представленному на фиг. 1 методом ионно-селективного травления в установке FEI-Strata 201 FIB. Микропинцет выполнен из быстрозакаленной ленты сплава с памятью формы Ti2NiCu толщиной 30 мкм, шириной 3 мм. Температуры начала и конца прямого и обратного мартенситного перехода Ms=54, Mf=52, As=63, Af=67 С. Ленту псевдопластически растягивали, нагружая весом около 10 Н, при охлаждении от 80 С до комнатной температуры, а затем помещали в установку ионного травления фирмы FEI "Strata 200". На ленте формировали ножку пинцета, зазор и захват объекта, как показано на фиг. 1. Затем наносили слой упругого металла - платины толщиной 700 нм, в этой же установке. Результат - нанопинцет показанный на фиг. 2. Нанопинцет укрепляли в той же установке к кончику вольфрамовой микропроволоки, заточенной электрохимическим способом. Затем на рабочую область нанопинцета наносили методом атомно-слоевой эпитаксии слой Al2O3 толщиной h=10 нм. Для этого использовали триметил-алюминий (ТМА, 98% Strem Chemicals) и химически чистую воду (Ricca Chemical) при 150°С и скорости роста 1.2  . Нанопинцет был покрыт тонким слоем, используя метод ALD в самодельном реакторе осаждения атомных слоев с горячими стенками, работающем в ультра высоко чистом азотном реактиве и промывочном газе, который в дальнейшем очищается, используя Gatekeeper-очиститель инертного газа (оценка <100 ppt Н2О и O2, Entegris) до поступления в реактор между 1 и 2 Торр.
. Нанопинцет был покрыт тонким слоем, используя метод ALD в самодельном реакторе осаждения атомных слоев с горячими стенками, работающем в ультра высоко чистом азотном реактиве и промывочном газе, который в дальнейшем очищается, используя Gatekeeper-очиститель инертного газа (оценка <100 ppt Н2О и O2, Entegris) до поступления в реактор между 1 и 2 Торр.
Пример 2. То же, что и в примере 1, но защитный диэлектрический слой наносили методом атомно-слоевой эпитаксии из оксида TiO2 толщиной 50 нм, используя тетрахлорид титана (TiCl4, 99% Strem Chemicals) и воду при 150°С и скорости 0.4 .
Пример 3. То же, что и в примере 1, но защитный диэлектрический слой наносили методом атомно-слоевой эпитаксии из ZnO толщиной 50 нм, используя диэтилцинк (DEZ, 95% Strem Chemicals) и воду при 150°С и скорости 2.5 .
Пример 4. То же, что и в примере 1, но защитный диэлектрический слой наносили методом атомно-слоевой эпитаксии из HfO2, используя тетракис диметиламидо) гафний (TDMAH, 99.99% Strem Chemicals) и воду при 150°С и скорости 1.0 .
Пример 5. То, же что и в примере 3, защитный диэлектрический слой наносили методом атомно-слоевой эпитаксии из ZrO2, используя тетракис диметиламидо) цирконий (TDMAZ, 99.99% Sigma-Aldrich) и воду при 175°С и скорости 1.1 .
Пример 6. Система управления устройством для манипулирования микрообъектами на основе микромеханического устройства, описанного в Примере 1 и показанного на фиг. 5. Система включает узел с нагревательным резистивным элементом в виде резистора SMD 50 Ом, который приклеен эпоксидной смолой к концу вольфрамовой иглы, заточенной электрохимическим способом. Система управления выполнена по схеме на фиг. 6. Внешний вид в вакуумной камере ионного сканирующего микроскопа показан на фиг. 6. Результат действия - захват и перемещение пучка углеродных нанотрубок показан на фиг. 7, 8.
Пример 7. Система управления, устройством для манипулирования микрообъектами на основе микромеханического устройства, описанная в Примере 1, закрепленная на конце заточенной проволоки с резистивным элементом и подключенная к блоку управления через вакуумные входы на корпусе сканирующего электронного микроскопа. Оператор, визуально наблюдая на мониторе срабатывания устройства, фиксирует посредством потенциометров на блоке управления уровни, соответствующие замкнутому и разомкнутому состоянию микромеханического устройства. В дальнейшем оператор может осуществлять манипуляции, переключаясь между уровнями при помощи тумблера на корпусе блока управления. Принципиальная схема блока управления представлена на фиг. 7.
Пример 8. То же, что и в примере 7, только используется импульсная система управления. При отдаче команды на срабатывание микромеханического устройства через программное обеспечение блока управления, блок управления начинает посылать нагревательные импульсы на резистивный элемент. В промежутке между импульсами, посредством резистивного элемента, производится измерение температуры и сравнением его с установленным оператором уровнем. Если заданная температура не была достигнута, то следует следующий импульс нагрева, если же измеренная температура достигла или превысила установленный уровень, то блок управления продолжает находиться в режиме измерения до тех пор, пока температура не опустится ниже установленного уровня, после чего последует следующий импульс нагрева. Принципиальная схема блока управления, работающего в импульсном режиме изображена на фиг. 8. На фиг. 9 представленная временная диаграмма работы импульсного блока управления, где красной линией показана граница срабатывания.
Пример 9. То же, что и в примере 7, только на заточенной иголке установлен дополнительный резистивный элемент и используется система управления с обратной связью. Оператором в программном обеспечении блока управления задаются температура подогретого состояния и температура срабатывания. Микромеханическое устройство в процессе работы находится в подогретом состоянии в близи границы фазового перехода, что позволяет увеличить быстродействие устройства. При отдаче команды на срабатывание микромеханического устройства через программное обеспечение блока управления происходит увеличение напряжения на выходе ЦАП, одновременно с этим осуществляется измерение температуры микромеханического устройства посредством дополнительного резистивного элемента и корректировка выходного напряжения ЦАП таким образом, чтобы максимально быстро достичь заданной температуры и эффективно поддерживать ее на необходимом уровне. Принципиальная схема блока управления с обратной связью изображена на фиг. 10. На фиг. 11 представленная временная диаграмма работы блока управления с обратной связью, где красной линией показан уровень комнатной температуры, синей - уровень подогретого состояния вблизи границы фазового перехода, зеленой - граница срабатывания.
ЛИТЕРАТУРА
1. A.P. Lee, D.L. Ciarlo, P.A. Krulevitch et.al. A practical microgripper by fine alignement, eutectic bonding and SMA actuation. Sensors and Actuators A 54 (1996) p. 755-759.
2. S. Takeuchi and I. Shimoyama. Three dimensional SMA microelectrodes with clipping structure for insect neural recording. Proc. IEEE, MEMS'99 p 464.
3. I Roch, Ph Bidaud, D Collard and L Buchaillot. Fabrication and characterization of an SU-8 gripper actuated by a shape memory alloy thin film. J. Micromech. Microeng. 13 (2003) 330-336.
4. Hao Zhao, Ming Chang, Xiaojun Liu, Jacque Lynn Gabayno, and Hsieh Tsun Chen. Design and implementation of shape memory alloy-actuated nanotweezers for nanoassembly. J. Micromech. Microeng. 24 (2014) 095012 (8pp)
5. Афонина B.C., Захаров Д.И., Иржак A.B., Коледов B.B., Лега П.В., Маширов А.В., Пихтин Н.А., Ситников Н.Н., Тарасов И.С., Шавров В.Г., Шеляков А.В. Микромеханическое устройство, способ его изготовления и система манипулирования микро- и нанообъектами. Патент №2458002, подача заявки: 05.08.2010, публикация патента: 10.08.2012.
6. А.Г. Хунджуа. Введение в структурную физику сплавов с эффектом памяти формы. МГУ, 1991.
7. В.Н. Журавлев, В.Г. Пушин. Сплавы с термомеханической памятью и их применение в медицине. Екатеринбург. 2000.
8. James S. Daubert, Grant Т. Hill, Hannah N. Gotsch, et al. Parsons. Corrosion Protection of Copper Using Al2O3, TiO2, ZnO, HfO2, and ZrO2 Atomic Layer Deposition. ACS Appl. Mater. Interfaces. 2017 ACS Appl. Mater. Interfaces, 2017, 9 (4), pp 4192-4201.
9. Suntola Т., Antson J. Method for producing compound thin films Patent. US 4058430 A 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2021 |
|
RU2778525C1 |
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| Система управления устройством с эффектом памяти формы для манипулирования микро- и нанообъектами | 2022 |
|
RU2790934C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА С ОБРАТИМОЙ ПАМЯТЬЮ ФОРМЫ ИЗ КВАЗИБИНАРНОГО СПЛАВА ИНТЕРМЕТАЛЛИЧЕСКОЙ СИСТЕМЫ TiNi-TiCu (ВАРИАНТЫ) | 2016 |
|
RU2692711C1 |
| АКТЮАТОР | 2007 |
|
RU2367573C2 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Метаматериал для управления преломлением и отражением электромагнитного излучения | 2023 |
|
RU2819591C1 |
| КОМПОЗИТНЫЙ ФУНКЦИОНАЛЬНЫЙ МАТЕРИАЛ | 2008 |
|
RU2381903C2 |
Использование: для манипулирования микро- и нанообъектами. Сущность изобретения заключается в том, что устройство для манипулирования микро- и нанообъектами включает два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из предварительно псевдопластически растянутого сплава с ЭПФ, а другой из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, причем в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с эффектом памяти формы с внешней стороны устройства, а захват для удержания объекта сформирован в сплаве с памятью формы, дополнительно содержит защитный слой диэлектрического прочного материала, нанесенный на рабочие поверхности микромеханического устройства. Технический результат: обеспечение возможности повышения качества, точности манипулирования нанообъектами. 4 н. и 13 з.п. ф-лы, 11 ил.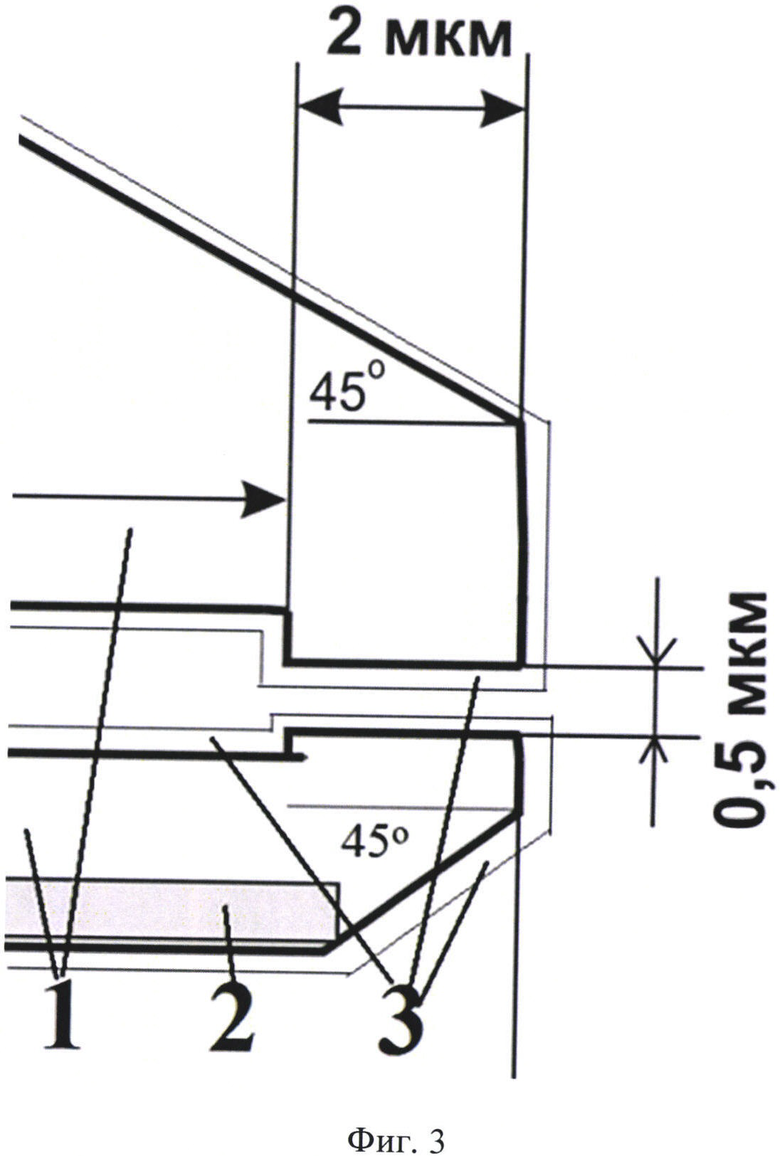
1. Устройство для манипулирования микро- и нанообъектами, включающее два плоских элемента, из которых, по крайней мере, один выполнен термочувствительным, состоящим из двух слоев, из которых один изготовлен из предварительно псевдопластически растянутого сплава с ЭПФ, а другой из упругого материала, причем слои прочно соединены между собой, а элементы соединены с одного конца, а с другого конца сформирован захват для удержания объекта манипулирования, причем в термочувствительном элементе упругий слой выполнен в виде пленки металла, нанесенной на слой сплава с эффектом памяти формы с внешней стороны устройства, а захват для удержания объекта сформирован в сплаве с памятью формы, отличающееся тем, что дополнительно содержит защитный слой диэлектрического прочного материала, нанесенный на рабочие поверхности микромеханического устройства.
2. Устройство для манипулирования микро- и нанообъектами по п. 1, отличающееся тем, что защитный слой выполнен из оксида гафния.
3. Устройство для манипулирования микро- и нанообъектами по п. 1, отличающееся тем, что защитный слой выполнен из оксида алюминия.
4. Устройство для манипулирования микро- и нанообъектами по п. 1, отличающееся тем, что защитный слой выполнен из оксида олова.
5. Устройство для манипулирования микро- и нанообъектами по п. 1, отличающееся тем, что толщина защитного слоя составляет преимущественно от 10-50 нанометров.
6. Способ изготовления устройства для манипулирования микро- и нанообъектами по пп. 1-5, включающий операции изготовления слоя материала с эффектом памяти формы с псевдопластической деформацией растяжения, изготовления слоя упругого материала и операцию механически прочного соединения этих слоев между собой плоскими сторонами, а также операцию формирования захвата манипулируемого объекта, причем предварительно производят операцию формирования слоя с эффектом памяти формы и внесения в него деформации псевдопластического растяжения, а затем операции создания упругого слоя и соединения слов для получения термочувствительного элемента, проводят путем напыления на поверхность слоя сплава с эффектом памяти формы слоя упругого материала, а затем формируют захват манипулируемого объекта на слое с эффектом памяти формы, при этом операцию нанесения упругого слоя производят при температуре материала с эффектом памяти формы ниже температуры переход мартенсит - аустенит сплава, отличающийся тем, что он включает операцию нанесения на рабочую поверхность микромеханического устройства защитного слоя из диэлектрического материала.
7. Способ изготовления устройства для манипулирования микро- и нанообъектами по пп. 1-5, отличающийся тем, что защитный слой из диэлектрического материала наносят методом атомно-слоевого осаждения при комнатной температуре.
8. Система управления устройством для манипулирования микро- и нанообъектами по п. 1, согласно предлагаемому техническому решению, включает микропроводку, на одном конце которой, закреплено устройство для манипулирования микро- и нанообъектами, а также рабочее поле с манипулируемым объектом и источник подогрева, другой конец микропроволоки укреплен на нанопозиционере, отличающийся тем, что источник подогрева выполнен в виде малоразмерного резистивного нагревающего элемента, расположенного в тепловом контакте вблизи конца микропроволоки, и электронную систему питания и управления током, протекающим через резистивный элемент, а также подводящие провода, соединяющие резистивный элемент с электронной системой питания и управления током.
9. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что в качестве материала микропроволоки выбран инвар.
10. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что в качестве материала микропроволоки выбран вольфрам.
11. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что конец микропроволоки выполнен коническим, заточка которого осуществляется методами электро-химического травления.
12. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что нагревательный резистивный элемент выполнен в виде малоразмерного резистора.
13. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что нагревательный резистивный элемент выполнен в виде малоразмерного полупроводникового диода.
14. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что нагревательный резистивный элемент выполнен в виде малоразмерной диодной сборки, состоящей из двух полупроводниковых диодов.
15. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что электронная система питания и управления током, протекающим через резистивный нагревающий элемент, содержит электронный блок для поддержания температуры кончика иглы с закрепленным устройством захвата микрообъектов во включенном состоянии при заранее заданной температуре выше температуры перехода мартенсит - аустенит сплава с эффектом памяти формы, а в выключенном состоянии ниже перехода мартенсит - аустенит сплава с эффектом памяти формы.
16. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что электронная система питания и управления током резистивного элемента выполнена в виде электронного блока под управлением ЭВМ и работающего в импульсном периодическом режиме, причем в промежутке между импульсами управляющего тока через малоразмерный диод осуществляется измерение температуры путем измерения падения напряжения на малоразмерном диоде, а в течение импульса подается скорректированное значение тока для нагрева диода.
17. Система управления устройством для манипулирования микро- и нанообъектами по п. 8, отличающаяся тем, что система управления устройством для манипулирования микро- и нанообъектами содержит микропроволоку, с концом которой в тепловом контакте размещен резистивный элемент нагрева в виде диодной сборки, состоящей из двух диодов, а электронный блок под управлением ЭВМ измеряет температуру кончика иглы путем регистрации падения напряжения на первом диоде и подает на второй диод скорректированный сигнал электрического тока для его нагрева до заранее заданной температуры: во включенном состоянии - выше температуры перехода мартенсит - аустенит сплава с эффектом памяти формы, а в выключенном состоянии - ниже температуры перехода аустенит - мартенсит сплава с эффектом памяти формы для осуществления контроля срабатывания устройства манипулирования в режиме реального времени.
| Н.Н | |||
| Ситников, И.А | |||
| Хабибуллина, А.В | |||
| Шеляков, БЫСТРОЗАКАЛЕННЫЕ АМОРФНО-КРИСТАЛЛИЧЕСКИЕ ЛЕНТЫ С ЭФФЕКТОМ ОБРАТИМОЙ ПАМЯТИ ФОРМЫ ИЗ СПЛАВА Ti50Ni25Cu25 ДЛЯ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ, Вектор науки ТГУ | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| П.В | |||
| Лега, В.В | |||
| Коледов, Д.С | |||
| Кучин, П.В | |||
| Мазаев, А.М | |||
| Жихарев, А.В | |||
| Маширов, В.С | |||
| Калашников, С.А | |||
| Зыбцев, В.Я | |||
| Покровский, В.Г | |||
| Шавров, В.А | |||
| Дикан, Л.В | |||
| Коледов, А.В | |||
| Шеляков, А.В | |||
| Иржак, МОДЕЛИРОВАНИЕ ПРОЦЕССА УПРАВЛЕНИЯ МИКРОМЕХАНИЧЕСКИМ УСТРОЙСТВОМ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ, РАДИОТЕХНИКА И ЭЛЕКТРОНИКА, том 60, N 10, с | |||
| ПРОМЫВНОЙ АППАРАТ | 1923 |
|
SU1080A1 |
| WO 2002026624 A1, 04.04.2002 | |||
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| JP 2010043530 A, 25.02.2010. | |||

