Изобретение относится к энергетическим и гидротехническим сооружениям, используемым при перепуске больших объемов воды, в частности к устройствам управления приводом затвора гидротехнического сооружения.
Известен способ позиционирования гидротехнического затвора, включающий пуск электродвигателя при плавном повышении частоты вращения, при этом одновременно, в соответствии с заданным законом движения, подают сигнал на изменение рабочего объема насоса и замедленно переключают в правое положение распределитель, что обеспечивает подачу рабочей жидкости в штоковую полость гидроцилиндра и, как следствие, начало плавного движения гидротехнического затвора, а слив рабочей жидкости производят через гидрозамок, распределитель и гидромотор, обеспечивающий требуемую жесткость привода регулированием нагрузки на электрогенераторе, производимым блоком системы управления в соответствии с величиной и знаком силы сопротивления (см. авторское свидетельство SU 1506015, 07.09.1989).
Из этого же авторского свидетельства известно устройство для позиционирования двустворчатых ворот шлюза, содержащее гидросистемы, каждая из которых включает гидронасосы, связанные с двигателями, и горизонтально установленный гидроцилиндр, соединенные сливной и напорной магистралями с системой распределения жидкости, включающей распределитель с электрогидравлическим управлением, а также блок обработки информации и выработки управляющих сигналов, связанный с датчиками контроля перемещения каждой створки ворот, причем блок обработки информации и выработки управляющих сигналов связан с электромоторами и электрогенераторами каждой гидросистемы.
Данный способ и устройство для его осуществления позволяют обеспечить перемещение гидротехнического затвора. Однако при данном способе позиционирования отсутствует контроль за положением гидротехнического затвора в процессе его перемещения, что снижает надежность работы гидротехнического сооружения.
Известен также способ контроля позиционирования створки ворот шлюза, включающий подачу управляющего сигнала на привод перемещения створки ворот шлюза и контроль положения створки ворот посредством энкодера, при этом сигнальный выход энкодера подключают к вычислительному устройству (см. патент CN 200946259, 12.09.2007).
Из этого же патента известно устройство контроля позиционирования створки ворот шлюза, содержащее привод перемещения створки ворот шлюза и энкодер для контроля положения створки ворот, при этом сигнальный выход энкодера подключен к вычислительному устройству.
Данный способ позиционирования и устройство для его осуществления позволяют контролировать положение и перемещение створки ворот шлюза в процессе его перемещения. Однако данные способ и устройство не позволяют контролировать положение створки при имеющих место быть ее наклонах в любое из радиальных, относительно траектории движения всякой точки поверхности створки, направлений, что сужает возможности устройства для позиционирования. Кроме того, данные способ и устройство обеспечивают контроль положения створки с существенными погрешностями, вызванными местом крепления энкодера, в силу чего на показания последнего влияют присущие месту крепления нелинейности типа люфт, сухое трение и пр., влияние которых непредсказуемо растет по мере эксплуатации затвора, вызывая створение с ударами.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ контроля позиционирования створок двустворчатых ворот шлюза, включающий подачу управляющего сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на внутренней кромке каждой створки ворот жестко закрепляют корпус первого углового энкодера, корпус второго углового энкодера жестко закрепляют на близлежащей стене камеры шлюза, и оба угловых энкодера устанавливают в одной горизонтальной плоскости, каждую створку снабжают пневмоцилиндром со штоком, на каждой створке ворот корпус пневмоцилиндра связывают с валом второго углового энкодера, шток пневмоцилиндра связывают с валом первого углового энкодера, линейный абсолютный энкодер закрепляют на пневмоцилиндре, входы вычислительного устройства соединяют сигнальными выходами всех энкодеров, в котором на основе данных с энкодеров формируют декартову либо полярную систему координат, в которой и осуществляют контроль положения любой точки каждой из створок при повороте последних (см. патент RU 2459033 C1, МПК Е02В 7/20, опубл. 20.08.2012 г., Бюл. №23).
Из данного патента также известно устройство контроля позиционирования створок двустворчатых ворот шлюза, содержащее привод перемещения каждой из створок ворот шлюза и устройство контроля положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на каждой створке ворот на ее внутренней по отношению к камере шлюза кромке жестко закреплен корпус первого углового энкодера, корпус второго углового энкодера жестко закреплен на близлежащей стене камеры шлюза, и оба угловых энкодера установлены в одной горизонтальной плоскости, каждая створка снабжена пневмоцилиндром со штоком, корпус которого связан с валом второго углового энкодера, шток пневмоцилиндра связан с валом первого углового энкодера, линейный абсолютный энкодер закреплен на пневмоцилиндре, причем устройство снабжено вычислительным устройством, входы которого соединены с сигнальными выходами всех энкодеров.
Недостаток данного способа и устройства состоит в следующем.
Данный способ и устройство позволяют контролировать смещение оси поворотной створки двустворчатых ворот шлюзового отсека только в направлении оси абсолютного линейного энкодера, что снижает точность контроля положения створок.
Кроме того, данные способ и устройство сложны в плане установки, эксплуатации, технического обслуживания и ремонта по причине применения в конструкции пневмоцилиндра. Помимо этого, использование в конструкции пневмоцилиндра увеличивает габариты устройства и снижает его надежность.
Задачей, на решение которой направлено настоящее изобретение, является повышение точности контроля положения створок ворот гидротехнического затвора во всем рабочем ходе поворотных створок двустворчатых ворот шлюзового отсека с исключением влияния смещения оси створки для обеспечения безударного створения створок ворот, корректируя в режиме реального времени скорость створения ворот.
Технический результат заключается в том, что достигается снижение влияния смещения оси створки под нагрузкой при определении положения в пространстве створок ворот шлюза в процессе их перемещения и, как следствие, обеспечивается возможность их плавного, безударного створения.
В части способа технический результат достигается за счет того, что производится контроль процесса створения двустворчатых ворот шлюзового отсека, включающий подачу управляющего сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством формирования математической модели в вычислительном устройстве, входы которого соединены с сигнальными выходами всех энкодеров, причем на основе данных с сигнальных выходов всех энкодеров формируется сферическая система координат с началом координат в центре вертикального вращения створки, в данной системе координат и осуществляют контроль положения всякой точки каждой из створок при их повороте, причем угловое положение внутренних стенок створок ворот по отношению к стенам камеры шлюза определяют по показаниям всех энкодеров, как азимутальный угол в используемой системе координат для точки, являющейся точкой соединения вала абсолютного углового энкодера с измерительными штоками линейных энкодеров, а положение в пространстве определяют в рамках тоже системы координат по азимутальному и зенитному углам этой же точки, последний из которых рассчитывается на основании данных с сигнальных выходов линейных энкодеров и констант, определяющих положение точек на поверхности створки относительно оси ее горизонтального вращения, полученных эмпирически при проведении установочно-монтажных работ в отношении устройства для реализации данного способа.
В части устройства технический результат достигается за счет того, что для контроля процесса створения двустворчатых ворот шлюзового отсека производится установка устройства, содержащего установленные на каждой створке абсолютный угловой энкодер и линейный абсолютный энкодер, вычислительное устройство, входы которого соединены с сигнальными выходами всех энкодеров, привод перемещения створки, причем установлен дополнительный абсолютный линейный энкодер, измерительный шток которого, вместе с измерительным штоком уже установленного абсолютного линейного энкодера, соединен с валом абсолютного углового энкодера, а корпусные части абсолютных линейных энкодеров, находясь на некотором, произвольно выбранном расстоянии друг от друга, соединены с близкорасположенной стеной камеры шлюза, а также тем, что абсолютный угловой энкодер закреплен жестко на штанговом креплении таким образом, чтобы ось вращения створки ворот и ось вращения вала абсолютного углового энкодера оказались совмещены, между верхней точкой оси вращения створки и штанговым креплением существует зазор, позволяющий избежать трения оси вращения створки и крепления, а штанговое крепление жестко соединено со створкой ворот, и сигнальные выходы дополнительного энкодера соединены со входами вычислительного устройства, при этом установка устройства производится в створенном состоянии ворот, измерительные штоки абсолютных линейных энкодеров должны составлять со стеной камеры шлюза прямой угол.
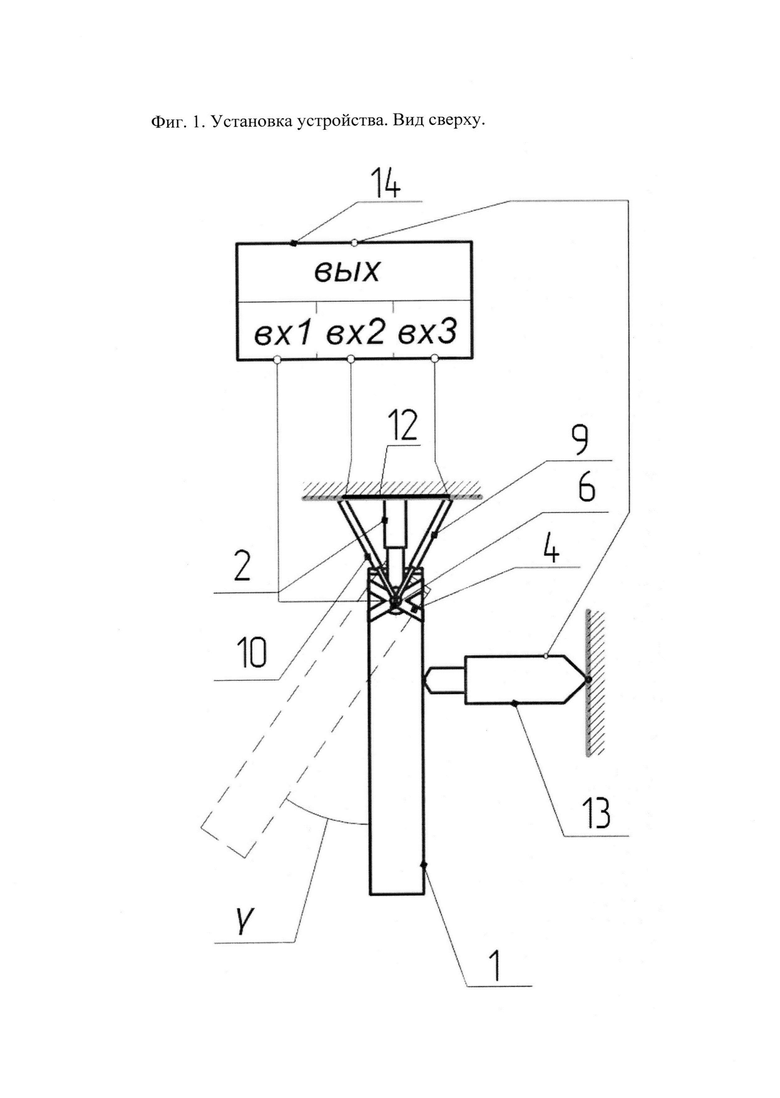
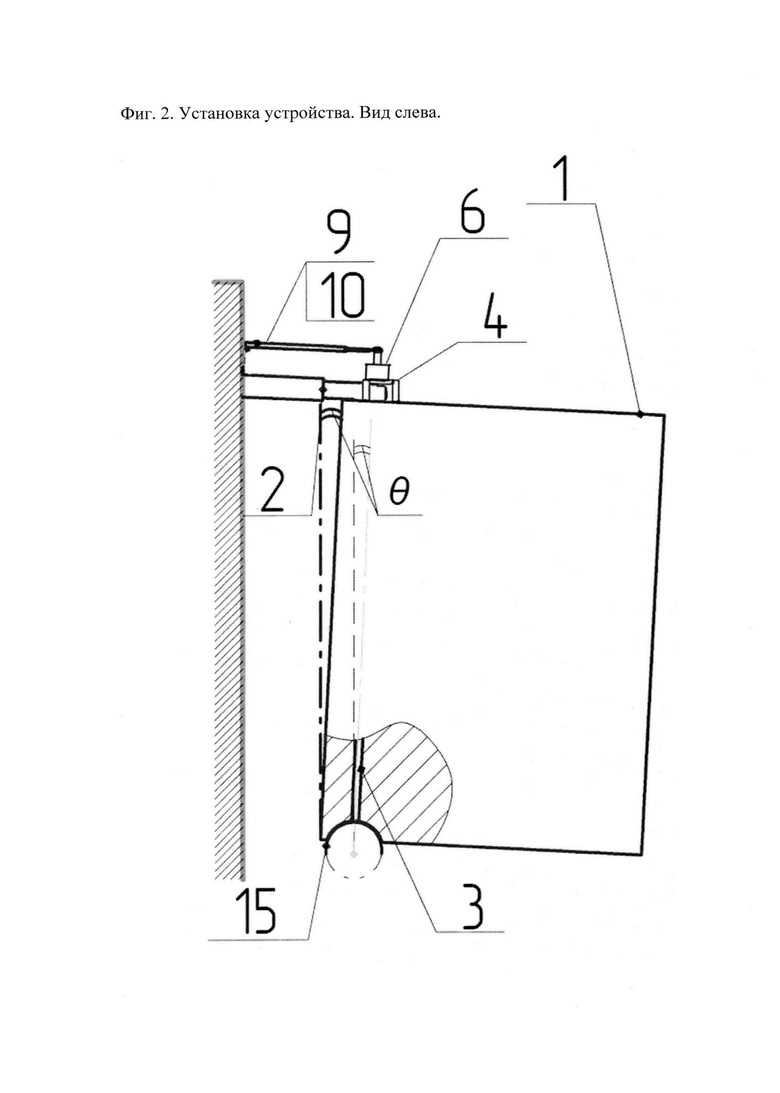
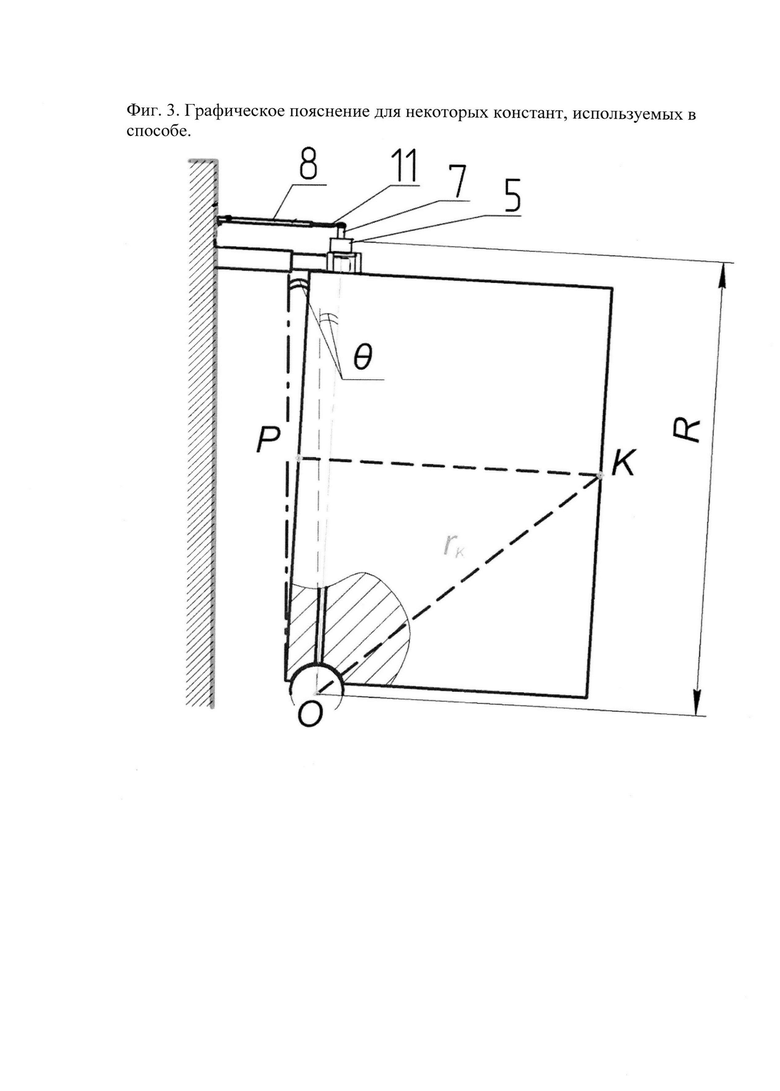
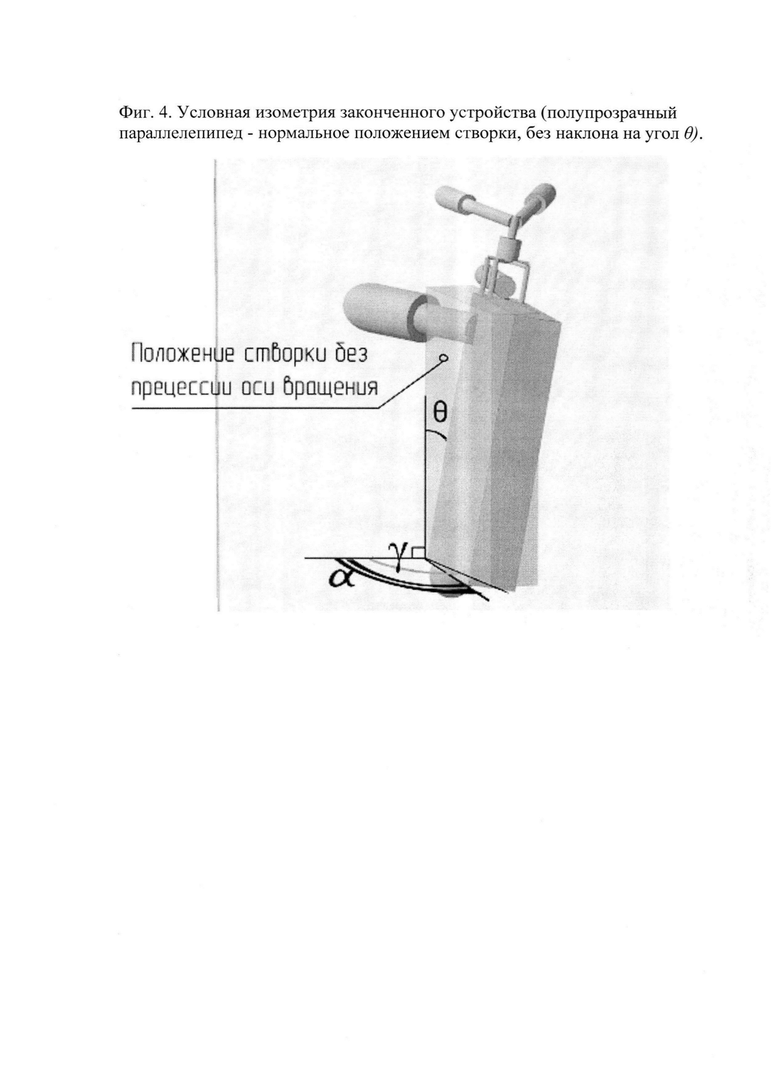
Сущность способа показана на фиг. 1, 2, 3 и 4. На фиг. 1 - показана установка устройства, вид сверху, на фиг. 2 - установка устройства, вид слева, на фиг. 3 отображено графическое пояснение для некоторых констант, используемых в способе, а также некоторые неупомянутые ранее части устройства, на фиг. 4 - изометрия устройства.
На фиг. 1, 2, 3 для реализации способа контроля процесса створения двустворчатых ворот шлюзового отсека створка 1 с помощью гальсбанта 2 установлена подвижно на неподвижную ось 3. Штанговое крепление 4 устанавливается таким образом, чтобы место, предназначенное для установки абсолютного углового энкодера, находилось строго над неподвижной осью 3. На штанговом креплении 4, жестко закрепленном на створке 1, установлен корпус 5 абсолютного углового энкодера 6, при этом собственная ось вращения вала 7 абсолютного углового энкодера 6 и неподвижная ось 3 вращения створки 1 должны быть совмещены. Измерительные штоки 8 абсолютных линейных энкодеров 9 и 10 шарнирно соединены между собой и с валом 7 абсолютного углового энкодера 6. Корпусы 11 абсолютных линейных энкодеров 9 и 10 шарнирно закреплены на близлежащей к створке ворот стене камеры шлюза 12, причем точки крепления корпусов 11 образуют горизонтальную прямую. Вал 7 абсолютного углового энкодера 6 направлен вверх. Створка ворот 1 приводится в движение с подачей управляющего сигнала на привод перемещения 13. Сигнальные выходы абсолютного углового энкодера 6 и абсолютных линейных энкодеров 9 и 10 соединены с входами вычислительного устройства 14, управляющие сигналы которого поступают на привод перемещения 13.
Способ контроля процесса створения двустворчатых ворот шлюзового отсека заключается в том, что створка 1 приводится в движение с подачей управляющего сигнала на привод перемещения 13. Сигнальные выходы абсолютного углового энкодера 6 и абсолютных линейных энкодеров 9 и 10 соединены с входами вычислительного устройства 14, управляющие сигналы которого поступают на привод перемещения 13. Выходные сигналы на сигнальных выходах абсолютного углового энкодера 6 и абсолютных линейных энкодеров 9 и 10 претерпевают функциональные преобразования, в результате которых точка соединения вала 7 абсолютного углового энкодера 6 и измерительных штоков 8 абсолютных линейных энкодеров 9 и 10 определяется в пространстве в сферической системе координат, что дает представление как о текущем состоянии протекающего процесса створения, так и об отклонении створки 1 от нормального положения.
Основываясь на данных о взаимном положении составляющих частей устройства, приведенных на фиг. 1, 2 и 3, а также графическом пояснении некоторых задействованных констант на фиг. 3, можно сказать, что в сформированной сферической системе координат точка соединения вала 7 абсолютного углового энкодера 6 и измерительных штоков 8 абсолютных линейных энкодеров 9 и 10 имеет следующие параметры: азимутальный угол ϕ, совпадающий по знаку и модулю с углом γ поворота створки 1 относительно створенного положения, зенитный угол θ, для нахождения которого используются данные с абсолютных линейных энкодеров 9 и 10 в створенном положении ворот, а также еще один параметр - расстояние от центра оси вертикального вращения створки до места соединения измерительных штоков 8 абсолютных линейных энкодеров 9 и 10 с валом 7 абсолютного углового энкодера 6 в створенном состоянии ворот, обозначенное на фиг. 3 как R, представляющую собой сумму длин двух отрезков - расстояния от центра сферы, частью которой является подпятник 15, до верхней точки неподвижной оси 3 и расстояния от верхней точки неподвижной оси 3 до места соединения измерительных штоков 8 абсолютных линейных энкодеров 9 и 10 и вала 7 абсолютного углового энкодера 6. Эти расстояния, а также расстояние между местами крепления со стеной камеры шлюза корпусов абсолютных линейных энкодеров находятся во время проведения установочно-монтажных работ в отношении устройства для реализации данного способа. Также для контроля положения некоторых точек створки требуется знать ее радиус-вектор относительно сформированной сферической системы координат. Для произвольно выбранной на фиг. 3 точки K такой радиус-вектор обозначен как rK и вычисляется, как гипотенуза OK треугольника OPK. Отрезки OP, PK определяются эмпирически при проведении установочно-монтажных работ в отношении устройства для реализации данного способа.
Так как углы α и γ, при наличии прецессии неподвижной оси 3, не совпадают, на фиг. 4 обозначена разница между этими углами.
Работа устройства заключается в следующем.
При повороте створки 1 с гальсбантом 2 абсолютный угловой энкодер 6 измеряет угол α во время процесса открытия или закрытия ворот, совпадающий с углом γ поворота створки 1 относительно начального, створенного, состояния створки 1 при отсутствии наклона на угол θ створки 1. Под углом θ стоит понимать зенитный угол, используемый в полярной системе координат с началом координат в центре вертикального вращения створки для точки, являющейся местом соединения измерительных штоков 8 абсолютных линейных энкодеров 9 и 10 с валом 7 абсолютного углового энкодера 5. Если же наклон на некоторый угол θ имеет место быть, абсолютные линейные энкодеры 9 и 10 совершают точкой, в которой их измерительные штоки 8 соединены с валом абсолютного углового энкодера 7, движение по окружности радиуса R, а соответственно наклон в вертикальной и разворот в горизонтальной плоскостях. Разворот в горизонтальной плоскости линейных энкодеров 9 и 10 приводит к изменению угла α на некоторую величину, которая вычисляется на основании начальных и текущих значений длины абсолютных линейных энкодеров 9 и 10 и значения поворота абсолютного углового энкодера 6 относительно начального состояния каждого из них (ворота закрыты), поэтому действительный угол поворота γ створки ворот 1 не всегда совпадает с α. Угол θ наклона створки 1 в вертикальной плоскости также вычисляется на основании начальных и текущих значений длины абсолютных линейных энкодеров 9 и 10 и значения поворота абсолютного углового энкодера 6 относительно начального их состояния (ворота закрыты). Исходя из этого получаем возможность оценить отклонение створки 1 от нормального положения в режиме реального времени и скомпенсировать его с помощью подачи управляющего сигнала с вычислительного устройства 14 на привод перемещения 13.
Таким образом, в условиях реальной эксплуатации способа и устройства для его реализации, во время процесса створения (закрытия) ворот с сигнальных выходов абсолютного углового энкодера 6 и абсолютных линейных энкодеров 9 и 10 на вычислительное устройство 14 поступают данные о перемещении измерительных штоков 8 абсолютных линейных энкодеров 9 и 10, а также о угле поворота вала 7 абсолютного углового энкодера 6 относительно начального положения, на основе этих данных вычислительное устройство 14 формирует сферическую систему координат, в которой, при появлении отклонения от заданной, как нормальная, траектории, вычислительное устройство 14 компенсирует вызванные прецессией неподвижной оси 3 створки 1 разности в движении створок 1 друг относительно друга путем подачи выходного управляющего сигнала к приводу перемещения 13, регулируя тем самым скорость движения створки 1 относительно другой такой же створки 1, исключая створение с ударами и аварийные ситуации, связанные с отклонением створки наклоном створки 1.
Техническая эффективность использования данного способа позиционирования створок двустворчатых ворот шлюза и устройство для его осуществления заключается в повышении точности контроля положения створки ворот, уменьшении влияния на позиционирование створок смещения оси вращения в горизонтальной плоскости створки двустворчатых ворот под нагрузкой при их перемещении, снижаются материальные затраты на обслуживание реализаций такого способа, повышается безотказность системы - в случае отсутствия выходного сигнала на одном из абсолютных линейных энкодеров 6 либо 7, угловой энкодеры 5 и оставшийся линейный энкодер 7 либо 6 будут определять приближенно угол поворота и наклон створки 1 по принципу существующих на данный момент методов. Дополнительно, снижение материальных затрат на установку и эксплуатацию достигается посредством того, что в состав устройства для реализации способа входит только типовое стандартное оборудование. Данный способ обеспечивает существенную минимизацию вероятности створения поворотных створок двустворчатых ворот шлюзового отсека с ударами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЗИЦИОНИРОВАНИЯ СТВОРОК ДВУСТВОРЧАТЫХ ВОРОТ ШЛЮЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459033C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Гальсбант двустворчатых ворот | 1980 |
|
SU933872A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Стопорное устройство,преимущественно для двустворчатых ворот шлюзов | 1980 |
|
SU908997A1 |
| Шлюзовые ворота | 1985 |
|
SU1247454A1 |
| Устройство для управления двустворчатым затвором шлюза | 1984 |
|
SU1265706A1 |
| ШЛЮЗООБРАЗНАЯ ПРОХОДНАЯ ДЛЯ ПЕРСОНАЛА | 1994 |
|
RU2123570C1 |
Группа изобретений относится к энергетическим и гидротехническим сооружениям, используемым при перепуске больших водоемов. Способ контроля процесса створения двустворчатых ворот шлюзового отсека включает подачу сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством формирования математической модели в вычислительном устройстве, входы которого соединены с сигнальными выходами всех энкодеров. На основе данных с сигнальных выходов всех энкодеров формируется сферическая система координат с началом координат в центре вертикального вращения створки. В данной системе координат и осуществляют контроль положения всякой точки каждой из створок при их повороте. Угловое положение внутренних стенок створок ворот по отношению к стенкам камеры шлюза определяют по показаниям всех энкодеров, как азимутальный угол в используемой системе координат для точки, являющейся точкой соединения вала абсолютного углового энкодера с измерительными штоками линейных энкодеров. Положение в пространстве определяют в рамках тоже системы координат по азимутальному и зенитному углам этой же точки, последний из которых рассчитывается на основании данных с сигнальных выходов линейных энкодеров и констант, определяющих положение точек на поверхности створки относительно оси ее горизонтального вращения, полученных эмпирически при проведении установочно-монтажных работ в отношении устройства для реализации данного способа. Устройство для контроля процесса створения двустворчатых ворот шлюзового отсека содержит установленные на каждой створке абсолютный угловой энкодер и абсолютный линейный энкодер, вычислительное устройство, входы которого соединены с сигнальными выходами всех энкодеров, привод перемещения створки. В устройтсве установлен дополнительный абсолютный линейный энкодер, измерительный шток которого вместе с измерительным штоком уже установленного абсолютного линейного энкодера соединен с валом абсолютного углового энкодера. Корпусные части абсолютных линейных энкодеров, находясь на некотором произвольно выбранном расстоянии друг от друга, соединены с близкорасположенной стеной камеры шлюза. Абсолютный угловой энкодер закреплен жестко на штанговом креплении таким образом, чтобы ось вращения створки ворот и ось вращения вала абсолютного углового энкодера оказались совмещены. Между верхней точкой оси вращения створки и штанговым креплением существует зазор, позволяющий избежать трения оси вращения створки и крепления, а штанговое крепление жестко соединено со створкой ворот. Сигнальные выходы дополнительного энкодера соединены со входами вычислительного устройства. Установку устройства производят в створенном состоянии ворот, измерительные штоки абсолютных линейных энкодеров должны составлять со стеной камеры шлюза прямой угол. Технический результат заключается в повышении точности контроля положения створок ворот гидротехнического затвора. 2 н.п. ф-лы, 4 ил.
1. Способ контроля процесса створения двустворчатых ворот шлюзового отсека, включающий подачу сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством формирования математической модели в вычислительном устройстве, входы которого соединены с сигнальными выходами всех энкодеров, отличающийся тем, что на основе данных с сигнальных выходов всех энкодеров формируется сферическая система координат с началом координат в центре вертикального вращения створки, в данной системе координат и осуществляют контроль положения всякой точки каждой из створок при их повороте, причем угловое положение внутренних стенок створок ворот по отношению к стенкам камеры шлюза определяют по показаниям всех энкодеров, как азимутальный угол в используемой системе координат для точки, являющейся точкой соединения вала абсолютного углового энкодера с измерительными штоками линейных энкодеров, а положение в пространстве определяют в рамках то же системы координат по азимутальному и зенитному углам этой же точки, последний из которых рассчитывается на основании данных с сигнальных выходов линейных энкодеров и констант, определяющих положение точек на поверхности створки относительно оси ее горизонтального вращения, полученных эмпирически при проведении установочно-монтажных работ в отношении устройства для реализации данного способа.
2. Устройство для контроля процесса створения двустворчатых ворот шлюзового отсека, содержащее установленные на каждой створке абсолютный угловой энкодер и абсолютный линейный энкодер, вычислительное устройство, входы которого соединены с сигнальными выходами всех энкодеров, привод перемещения створки, отличающееся тем, что установлен дополнительный абсолютный линейный энкодер, измерительный шток которого, вместе с измерительным штоком уже установленного абсолютного линейного энкодера, соединен с валом абсолютного углового энкодера, а корпусные части абсолютных линейных энкодеров, находясь на некотором произвольно выбранном расстоянии друг от друга, соединены с близкорасположенной стеной камеры шлюза, а также тем, что абсолютный угловой энкодер закреплен жестко на штанговом креплении таким образом, чтобы ось вращения створки ворот и ось вращения вала абсолютного углового энкодера оказались совмещены; между верхней точкой оси вращения створки и штанговым креплением существует зазор, позволяющий избежать трения оси вращения створки и крепления, а штанговое крепление жестко соединено со створкой ворот, и сигнальные выходы дополнительного энкодера соединены со входами вычислительного устройства, при этом установку устройства производят в створенном состоянии ворот, измерительные штоки абсолютных линейных энкодеров должны составлять со стеной камеры шлюза прямой угол.
| СПОСОБ КОНТРОЛЯ ПОЗИЦИОНИРОВАНИЯ СТВОРОК ДВУСТВОРЧАТЫХ ВОРОТ ШЛЮЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459033C1 |
| Устройство автоматической синхронизации приводов ворот шлюза | 1986 |
|
SU1404580A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| JP 2001279649 A, 10.10.2001 | |||
| US 8602686 B2, 10.12.2013. | |||

