Заявляемое изобретение относится к системам автоматического управления полетом высокоманевренного летательного аппарата, в частности к системам управления продольным движением высокоманевренного летательного аппарата.
Известны системы автоматического управления полетом высокоманевренного летательного аппарата. Подобные системы описаны, например, в патенте RU 2310899, G05D 1/08, публ. 20.11.2007, книгах: Оболенский Ю.Г. Управление полетом маневренных самолетов. - М.: Филиал Воениздат, 2007, с.248-260; Михалев И.А. и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987, с.186.
К недостаткам известных систем автоматического управления полетом высокоманевренного летательного аппарата следует отнести тот факт, что применительно к высокоманевренным летательным аппаратам, к которым предъявляются достаточно высокие требования по точности управления, они не обеспечивают ограничения предельных значений угла атаки, угловой скорости и углового ускорения тангажа, а также требуемых характеристик управляемости во всем диапазоне изменения управляющего сигнала. Последний недостаток связан с тем, что в известных системах при больших управляющих воздействиях исполнительный привод объекта управления выходит на предельные значения и происходит размыкание цепей по сигналам обратных связей.
Наиболее близкой по технической сущности к заявляемой является система автоматического управления полетом высокоманевренного летательного аппарата, представленная в книге Михалева И.А. и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987, с.186. Однако данной системе присущи недостатки, описанные выше.
Целью настоящего изобретения является ограничение предельных значений угла атаки, угловой скорости и углового ускорения тангажа, а также обеспечение требуемых характеристик управляемости во всем диапазоне изменения управляющего сигнала.
Поставленная цель достигается за счет того, что в систему автоматического управления полетом высокоманевренного летательного аппарата, содержащую вычислитель заданных траекторных значений перегрузки, датчик нормальной перегрузки, датчик угловой скорости тангажа, первый сумматор, последовательно соединенные интегрирующее устройство, второй, третий и четвертый сумматоры, изодромный фильтр и исполнительный привод, причем выход датчика нормальной перегрузки соединен с первыми входами первого и второго сумматоров, выход датчика угловой скорости тангажа соединен с первым входом третьего сумматора и через изодромный фильтр с первым входом четвертого сумматора, дополнительно введены первый управляемый ограничитель, первый вход которого соединен с выходом вычислителя заданных траекторных значений перегрузки, а выход соединен со вторым входом первого сумматора, второй управляемый ограничитель, первый вход которого соединен с выходом первого сумматора, а выход соединен с первым входом интегрирующего устройства, динамический ограничитель, вход которого соединен с выходом четвертого сумматора, а выход соединен со вторым входом интегрирующего устройства, пятый сумматор, первый вход которого соединен с выходом четвертого сумматора, второй вход соединен с выходом датчика угловой скорости тангажа, а выход соединен с исполнительным приводом, бесплатформенная инерциальная система (БИНС), первый, второй и третий функциональные блоки, первые входы которых соединены с выходом БИНС по сигналу скорости, а вторые входы соединены с выходом БИНС по сигналу высоты, и схема «минимум», первый и второй входы которой соединены с выходами первого и второго функциональных блоков соответственно, выход соединен со вторым входом первого управляемого ограничителя, а выход третьего функционального блока соединен со вторым входом второго управляемого ограничителя.
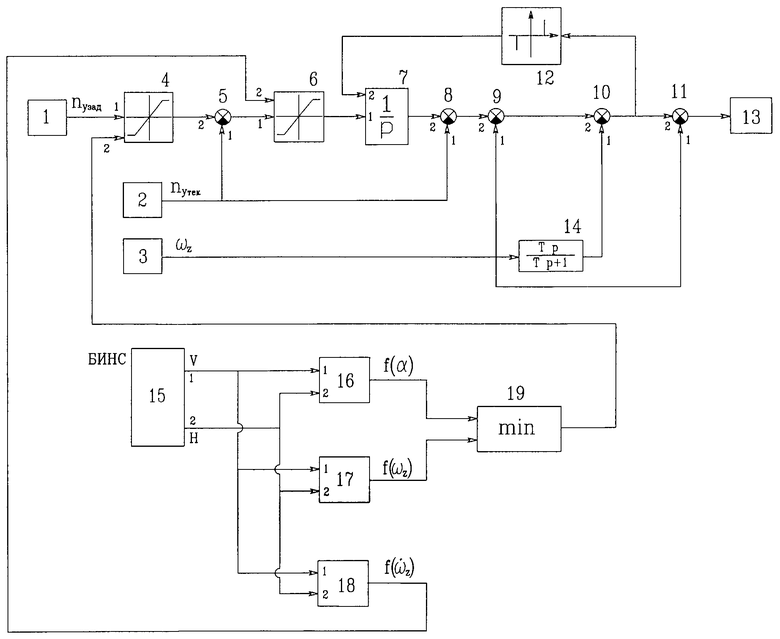
Сущность изобретения поясняется чертежом, на котором представлена блок-схема заявляемой системы автоматического управления полетом высокоманевренного летательного аппарата.
Данная система содержит вычислитель 1 заданных траекторных значений перегрузки, датчик 2 нормальной перегрузки, датчик 3 угловой скорости тангажа, первый управляемый ограничитель 4, первый сумматор 5, второй управляемый ограничитель 6, интегрирующее устройство 7, второй, третий, четвертый и пятый сумматоры 8, 9, 10 и 11, динамический ограничитель 12, исполнительный привод 13, изодромный фильтр 14, бесплатформенную инерциальную систему (БИНС) 15, первый, второй и третий функциональные блоки 16, 17 и 18 и схему 19 «минимум».
При автоматическом управлении полетом высокоманевренного летательного аппарата на выходе вычислителя 1 заданных траекторных значений перегрузки формируется сигнал, соответствующий необходимому изменению пространственного положения летательного аппарата. Изменение пространственного положения сопровождается изменением нормальной перегрузки и угловой скорости тангажа, которые фиксируются датчиками 2 и 3 нормальной перегрузки и угловой скорости тангажа. Сигнал с выхода вычислителя 1 заданных траекторных значений перегрузки подается через первый управляемый ограничитель 4 на второй вход первого сумматора 5. Отметим, что с помощью данного управляемого ограничителя 4 осуществляют ограничение предельных значений угла атаки и угловой скорости тангажа. На первый вход первого сумматора 5 подается сигнал с датчика 2 нормальной перегрузки. Сигнал рассогласования между текущим и заданным значениями нормальной перегрузки с выхода первого сумматора 5 через второй управляемый ограничитель 6, осуществляющий ограничение предельных значений углового ускорения тангажа, подается на первый вход интегрирующего устройства 7, осуществляющего астатическое управление нормальной перегрузкой. Сигнал с выхода интегрирующего устройства 7 поступает на второй вход второго сумматора 8, на первый вход которого подается сигнал обратной связи с датчика 2 нормальной перегрузки. Сигнал с выхода второго сумматора 8 подается на второй вход третьего сумматора 9, на первый вход которого поступает демпфирующий сигнал с датчика 3 угловой скорости тангажа.
Для повышения устойчивости в системе используется изодромный фильтр 14, на вход которого поступает сигнал с датчика 3 угловой скорости тангажа, а сигнал с его выхода поступает на первый вход четвертого сумматора 10.
Для обеспечения удовлетворительных характеристик управляемости при больших управляющих воздействиях осуществляют защиту исполнительного привода 13 объекта управления от выхода на предельные значения, приводящие к размыканию системы по сигналам обратных связей, что является причиной ухудшения характеристик управляемости. Чтобы этого не происходило, в систему введен динамический ограничитель 12, на вход которого подается сигнал с выхода четвертого сумматора 10, а сигнал с его выхода подается на второй вход интегрирующего устройства 7. Если уровень управляющего сигнала на выходе четвертого сумматора 10 по абсолютной величине больше предельного, на выходе интегрирующего устройства 7 формируют сигнал, при котором сумма всех сигналов сумматора 10 равнялась бы этому предельному значению. Сигнал с выхода четвертого сумматора 10 подается на первый вход пятого сумматора 11, на втором входе которого всегда присутствует демпфирующий сигнал датчика 3 угловой скорости тангажа. Так как знаки данных сигналов противоположны, исполнительный привод 13 объекта управления, на вход которого поступает сигнал с выхода пятого сумматора 11, никогда не выходит на предельные значения.
Система также снабжена БИНС 15, выход которой по сигналу скорости подключен к первым, а выход по сигналу высоты - к вторым входам функциональных блоков 16, 17 и 18, при этом на выходах первого и второго функциональных блоков 16 и 17 формируются сигналы максимального значения перегрузок, соответствующие максимально допустимому значению угла атаки и максимально допустимому значению угловой скорости тангажа соответственно. Отметим, что данные максимальные значения перегрузок зависят от высоты и скорости полета. На выходе третьего функционального блока 18 формируется сигнал, равный величине ограничения сигнала рассогласования между текущим и заданным значениями перегрузки. Сформированный сигнал, зависящий от величин скорости и высоты полета, с выхода третьего функционального блока 18 подают на второй вход второго ограничителя 6, изменяют величину данного ограничения и, тем самым, ограничивают максимальную величину углового ускорения.
Кроме того, в системе предусмотрена схема 19 «минимум», на первый вход которой подается сигнал с выхода первого функционального блока 16, а на второй вход - сигнал с выхода второго функционального блока 17.
Сигнал, соответствующий минимальному из двух максимальных значений заданной перегрузки, с выхода схемы 19 «минимум» подают на второй вход первого управляемого ограничителя 4, осуществляя ограничение заданных значений перегрузки, при этом ограничивая максимальный угол атаки либо угловую скорость тангажа объекта управления.
Для реализации заявленной системы автоматического управления полетом высокоманевренного летательного аппарата не требуется специального оборудования. В системе могут быть использованы стандартные датчики угловых скоростей и нормальной перегрузки. Функции вычислителей системы и БИНС могут быть реализованы с помощью БЦВМ.
Как показали результаты моделирования системы автоматического управления с использованием предлагаемого технического решения, обеспечивается возможность ограничения предельных значений угла атаки, угловой скорости и углового ускорения тангажа, а также обеспечиваются требуемые характеристики управляемости во всем диапазоне изменения управляющего сигнала.
Таким образом, предлагаемая система реализуема и применима, в частности, для высокоточного высокоманевренного объекта управления.
В настоящее время изготавливаются первые образцы заявляемой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2446429C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2015 |
|
RU2588174C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
Изобретение относится к системам автоматического управления полетом высокоманевренного летательного аппарата, в частности к системам управления продольным движением. Технический результат заключается в том, чтобы обеспечить ограничение предельных значений угла атаки, угловой скорости и углового ускорения тангажа, а также требуемые характеристики управляемости во всем диапазоне изменения управляющего сигнала. Система содержит вычислитель заданных траекторных значений перегрузки, датчик нормальной перегрузки, датчик угловой скорости тангажа, первый управляемый ограничитель, первый сумматор, второй управляемый ограничитель, интегрирующее устройство, второй, третий, четвертый и пятый сумматоры, динамический ограничитель, исполнительный привод, изодромный фильтр, бесплатформенную инерциальную систему (БИНС), первый, второй и третий функциональные блоки и схему «минимум». 1 ил.
Система автоматического управления полетом высокоманевренного летательного аппарата, содержащая вычислитель заданных траекторных значений перегрузки, датчик нормальной перегрузки, датчик угловой скорости тангажа, первый сумматор, последовательно соединенные интегрирующее устройство, второй, третий и четвертый сумматоры, изодромный фильтр и исполнительный привод, причем выход датчика нормальной перегрузки соединен с первыми входами первого и второго сумматоров, выход датчика угловой скорости тангажа соединен с первым входом третьего сумматора и через изодромный фильтр - с первым входом четвертого сумматора, отличающаяся тем, что в нее дополнительно введены первый управляемый ограничитель, первый вход которого соединен с выходом вычислителя заданных траекторных значений перегрузки, а выход соединен со вторым входом первого сумматора, второй управляемый ограничитель, первый вход которого соединен с выходом первого сумматора, а выход соединен с первым входом интегрирующего устройства, динамический ограничитель, вход которого соединен с выходом четвертого сумматора, а выход соединен со вторым входом интегрирующего устройства, пятый сумматор, первый вход которого соединен с выходом четвертого сумматора, второй вход соединен с выходом датчика угловой скорости тангажа, а выход соединен с исполнительным приводом, бесплатформенная инерциальная система (БИНС), первый функциональный блок, формирующий сигнал максимального значения перегрузки, соответствующий максимально допустимому значению угла атаки, второй функциональный блок, формирующий сигнал максимального значения перегрузки, соответствующий максимально допустимому значению угловой скорости тангажа, третий функциональный блок, формирующий сигнал, равный величине ограничения сигнала рассогласования между текущим и заданным значениями перегрузки, первые входы функциональных блоков соединены с выходом БИНС по сигналу скорости, а вторые входы соединены с выходом БИНС по сигналу высоты, и схема «минимум», первый и второй входы которой соединены с выходами первого и второго функциональных блоков соответственно, выход соединен со вторым входом первого управляемого ограничителя, а выход третьего функционального блока соединен со вторым входом второго управляемого ограничителя.
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления полетом | |||
| - М.: Машиностроение, 1987, с.186. | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА СХЕМЫ "УТКА" С КРЫЛОМ ОБРАТНОЙ СТРЕЛОВИДНОСТИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1984 |
|
SU1830843A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2025413C1 |
| RU 93047514 A, 20.11.1996 | |||
| АВТОМАТ ПРОДОЛЬНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2339989C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2007 |
|
RU2340510C1 |
| СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2007 |
|
RU2344460C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| RU | |||

