Заявляемое изобретение относится к способам автоматического управления полетом самолета, в частности к способам автоматического управления боковым движением высокоманевренного самолета.
Известны способы автоматического управления боковым движением самолета. Подобные способы описаны, в частности, в патентах RU 2096263, B64C 13/18, публ. 1997.11.20; RU 2272747, B64C 13/18, публ. 2006.03.27; в а.с. SU 749030, B64C 13/18, публ. 2004.10.27; в книге Михалева А.И. и др. Системы автоматического управления самолетом. М., Машиностроение, 1987, с.174.
К недостаткам известных способов автоматического управления боковым движением высокоманевренного самолета следует отнести тот факт, что при больших управляющих воздействиях от ручки управления управляющие сигналы системы выводят привод на предельные значения, и характеристики управляемости высокоманевренного самолета становятся неприемлемыми. Это связано с тем, что при известных способах управления происходит «размыкание» контура управления по сигналам обратных связей, и фактически характеристики управляемости будут соответствовать самолету без системы управления боковым движением.
Наиболее близким по технической сущности к заявляемому является способ автоматического управления полетом высокоманевренного самолета, представленный в книге Михалева А.И. и др. Системы автоматического управления самолетом. М., Машиностроение, 1987, с.174.
Однако данному способу управления боковым движением маневренного самолета присущи недостатки, описанные выше, не позволяющие обеспечить требуемые характеристики управляемости боковым движением маневренного самолета.
Целью изобретения является обеспечение требуемых характеристик управляемости во всем диапазоне перемещения ручки управления.
Поставленная цель достигается за счет того, что согласно предлагаемому способу автоматического управления боковым движением высокоманевренного самолета, при котором в качестве параметра, связанного с воздействием летчика, используют перемещение ручки управления, в каналах крена и рысканья формируют сигналы управления, пропорциональные перемещению ручки управления, с использованием префильтров, а также формируют демпфирующие изодромированные сигналы угловых скоростей крена и рысканья, величины которых при их малых значениях приравнивают нулю, сформированные сигналы суммируют, полученные суммарные сигналы динамически ограничивают посредством интегрирующих звеньев соответствующих префильтров каналов крена и рысканья, для чего используют данные сигналы в качестве сигналов обратной связи, которые поступают на входы интегрирующих звеньев в том случае, если абсолютные величины этих сигналов превышают величины ограничения, и дополнительно суммируют эти сигналы с соответствующими демпфирующими изодромированными сигналами угловых скоростей крена и рысканья, которые ранее приравнивались нулю, сформированные сигналы управления подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления.
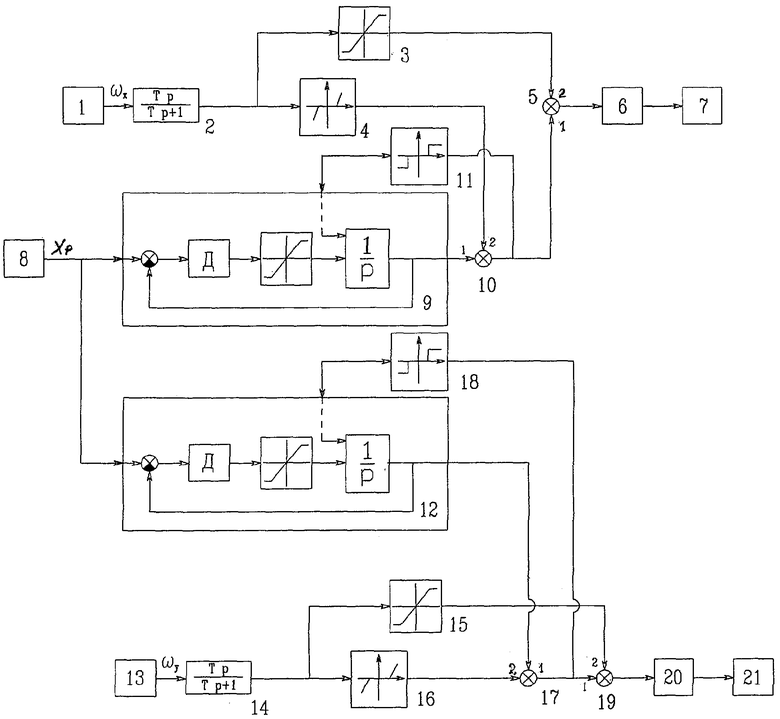
Сущность изобретения поясняется чертежом, на котором представлена блок-схема системы, реализующей заявляемый способ управления боковым движением высокоманевренным самолетом.
Система содержит датчик 1 угловой скорости крена, первый изодромный фильтр 2, первый ограничитель 3, первое звено 4 с зоной нечувствительности, первый сумматор 5, привод 6 элеронов, элероны 7, датчик 8 положения ручки управления, первый префильтр 9, третий сумматор 10, первое звено 11 с зоной нечувствительности и ограничением, второй префильтр 12, датчик 13 угловой скорости рысканья, второй изодромный фильтр 14, второй ограничитель 15, второе звено 16 с зоной нечувствительности, четвертый сумматор 17, второе звено 18 с зоной нечувствительности и ограничением, второй сумматор 19, привод 20 руля направления и руль 21 направления.
При воздействии летчика на ручку управления на выходе датчика 8 положения ручки формируется сигнал хр, поступающий на вход первого 9 и второго 12 префильтров, представляющих собой устройства, состоящие из последовательно соединенных сумматора, усилительного звена, ограничителя и интегрирующего звена, охваченных отрицательной обратной связью. Сигнал с выхода первого префильтра 9 через третий 10 и первый 5 сумматоры поступает на вход привода 6 элеронов и отклоняет элероны 7. Сигнал с выхода второго префильтра 12 через четвертый 17 и второй 19 сумматоры поступает на вход привода 20 руля направления и отклоняет руль 21 направления. При отклонении органов бокового управления (элеронов, руля направления) изменяются параметры движения самолета, которые измеряются датчиком 1 угловой скорости крена и датчиком 13 угловой скорости рысканья. Сигнал wx датчика 1 угловой скорости крена подают на вход первого изодромного фильтра 2, сигнал с выхода которого через первый ограничитель 3 подают на второй вход сумматора 5 и через первое звено 4 с зоной нечувствительности - на второй вход сумматора 10. Сигнал с выхода сумматора 10 подают на первый вход сумматора 5 и через первое звено 11 с зоной нечувствительности и ограничением - на вход интегрирующего звена первого префильтра 9.
Таким образом, при сигнале на выходе сумматора 10, большем по абсолютной величине, чем величина зоны нечувствительности первого звена 11 с зоной нечувствительности и ограничением, на вход интегрирующего звена префильтра 9 поступает сигнал, по которому на выходе интегрирующего звена выставляют начальные условия, динамически ограничивающие сигнал сумматора 10, причем величину ограничения сигнала выбирают такой, чтобы сумма сигналов с ограничителя 3 и с сумматора 10 не превышала величины, соответствующей предельному отклонению привода 6 элеронов. В результате на входе привода 6 элеронов всегда присутствует демпфирующий изодромированный сигнал угловой скорости крена, и не происходит «размыкания» системы по демпфирующему сигналу.
Аналогичным образом формируют сигнал управления в канале руля направления. Сигнал ωу с выхода датчика 13 угловой скорости рысканья подают на вход второго изодромного фильтра 14, сигнал с выхода которого через ограничитель 15 подают на второй вход сумматора 19 и через второе звено 16 с зоной нечувствительности - на второй вход сумматора 17. Сигнал с выхода сумматора 17 подают на первый вход сумматора 19 и через второе нелинейное звено 18 с зоной нечувствительности и ограничением - на вход интегрирующего звена второго префильтра 12.
Таким образом, при сигнале на выходе сумматора 17, большем по абсолютной величине, чем величина зоны нечувствительности звена 18 с зоной нечувствительности и ограничением, на вход интегрирующего звена префильтра 12 поступает сигнал, по которому на выходе интегрирующего звена выставляют начальные условия, динамически ограничивающие сигнал сумматора 17, причем величину ограничения сигнала выбирают такой, чтобы сумма сигналов с ограничителя 15 и с сумматора 17 не превышала величины, соответствующей предельному отклонению привода 20 руля направления. В результате на входе привода 20 руля направления всегда присутствует демпфирующий изодромированный сигнал угловой скорости рысканья, и не происходит «размыкания» системы по демпфирующему сигналу.
Для реализации заявляемого способа автоматического управления боковым движением высокоманевренного самолета не требуется специального оборудования. В системе могут быть использованы стандартные датчики угловых скоростей и боковой перегрузки, выпускаемые промышленностью. Функции вычислителей могут быть реализованы с помощью БЦВМ.
Как показали результаты моделирования САУ-451-05 СМТ-И для самолета МИГ-29 СМТ-И, при использовании данного способа автоматического управления боковым движением обеспечиваются требуемые характеристики устойчивости и управляемости во всем диапазоне перемещения ручки управления. В особенности положительный эффект следует отметить при пилотировании самолета на предельных углах атаки.
Таким образом, предлагаемый способ реализуем и применим, в частности, для высокоманевренных самолетов типа МИГ-29 СМТ-И.
В настоящее время принято решение о проведении испытаний данного способа управления на летающей лаборатории МИГ-29 СМТ-И.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
Изобретение относится к способам автоматического управления полетом самолета. Способ заключается в том, что в качестве параметра, связанного с воздействием летчика, используют перемещение ручки управления. В каналах крена и рысканья формируют сигналы управления, пропорциональные перемещению ручки управления, формируют демпфирующие изодромированные сигналы угловых скоростей крена и рысканья, величины которых при их малых значениях приравнивают нулю. Сформированные сигналы суммируют, полученные суммарные сигналы динамически ограничивают посредством интегрирующих звеньев соответствующих префильтров каналов крена и рысканья. Используют данные сигналы в качестве сигналов обратной связи, которые поступают на входы интегрирующих звеньев в том случае, если абсолютные величины этих сигналов превышают величины ограничения. Дополнительно суммируют эти сигналы с соответствующими демпфирующими изодромированными сигналами угловых скоростей крена и рысканья, которые ранее приравнивались нулю. Сформированные сигналы управления подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления. Технический результат заключается в обеспечении требуемых характеристик управляемости во всем диапазоне перемещения ручки управления. 1 ил.
Способ автоматического управления боковым движением высокоманевренного самолета, при котором в качестве параметра, связанного с воздействием летчика, используют перемещение ручки управления, отличающийся тем, что в каналах крена и рысканья формируют сигналы управления, пропорциональные перемещению ручки управления, с использованием префильтров, а также формируют демпфирующие изодромированные сигналы угловых скоростей крена и рысканья, величины которых при их малых значениях приравнивают нулю, сформированные сигналы суммируют, полученные суммарные сигналы динамически ограничивают посредством интегрирующих звеньев соответствующих префильтров каналов крена и рысканья, для чего используют данные сигналы в качестве сигналов обратной связи, которые поступают на входы интегрирующих звеньев в том случае, если абсолютные величины этих сигналов превышают величины ограничения, и дополнительно суммируют эти сигналы с соответствующими демпфирующими изодромированными сигналами угловых скоростей крена и рысканья, которые ранее приравнивались нулю, сформированные сигналы управления подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления.
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| US 3980258 A, 14.09.1976. | |||

