Заявляемое изобретение относится к системам автоматического управления полетом самолета, в которых требования продольной устойчивости и управляемости самолета обеспечиваются благодаря использованию статических автоматов продольного управления (АПУ).
Известные системы описаны, например, в книгах: Михалев И.А. и др. Системы автоматического управления самолетом. Методы анализа и расчета. М., Машиностроение, 1971, с.142, 146-150; под ред. Федорова С.М. Автоматизированное управление самолетами и вертолетами. М., Транспорт, 1977, с.76-77.
К недостаткам известных систем автоматического управления, предусматривающих использование АПУ, следует отнести тот факт, что, применительно к высокоманевренному самолету типа МИГ-29КУБ, при выходе привода на предельные значения при определенной величине сигнала с датчика положения ручки, дальнейшее увеличение перемещения ручки и затем перемещение ее в противоположном направлении до момента, когда привод «сходит с упора», не приводит к изменению нормальной перегрузки. В данном диапазоне перемещения ручки управления летчиком самолет становится неуправляемым, что из условий безопасности полета недопустимо.
Наиболее близкой по технической сущности к заявляемой является система автоматического управления полетом высокоманевренного самолета, предусматривающая использование статического АПУ, описанная в книге Оболенского Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007, с.254.
Однако данной системе присущи недостатки, описанные выше, не позволяющие обеспечить требуемые характеристики устойчивости и управляемости в продольном движении самолета.
Целью настоящего изобретения является обеспечение требуемых характеристик управляемости самолета путем динамического ограничения управляющего сигнала и ликвидации «свободного хода» ручки управления летчика и повышения тем самым безопасности полета.
Поставленная цель достигается за счет того, что в систему автоматического управления полетом высокоманевренного самолета, содержащую ручку управления летчика с датчиком положения ручки управления, последовательно соединенные блок формирования коэффициента усиления по сигналу ручки управления, префильтр, первый сумматор, второй сумматор, привод и аэродинамический руль, интегральный блок датчиков, первый выход которого по сигналу нормальной перегрузки подключен ко второму входу первого сумматора, второй выход по сигналу угловой скорости тангажа через изодромный фильтр подключен ко второму входу второго сумматора, дополнительно введены нелинейный элемент с ограничением и зоной нечувствительности, третий сумматор, первый ограничитель, последовательно соединенные первый коммутатор, блок деления, первое запоминающее устройство, четвертый сумматор, второй коммутатор, блок умножения, первое устройство сравнения, второе запоминающее устройство, второй ограничитель, пятый сумматор и второе устройство сравнения, последовательно соединенные блок производной, нелинейный элемент с зоной нечувствительности и устройство определения знака и последовательно соединенные третье устройство сравнения, третий коммутатор и апериодический фильтр, причем выход датчика положения ручки управления подключен к первому входу третьего сумматора и к входу первого ограничителя, второй вход третьего сумматора соединен с выходом пятого сумматора, а выход через блок формирования коэффициента усиления по сигналу ручки управления подключен ко второму входу блока деления, выход первого ограничителя подключен к входу блока производной и ко второму входу четвертого сумматора, вход нелинейного элемента с ограничением и зоной нечувствительности соединен с выходом первого сумматора, а выход нелинейного элемента с ограничением и зоной нечувствительности подключен ко второму входу префильтра, выход которого соединен с первым входом первого коммутатора, и ко вторым входам первого, второго и третьего коммутаторов и апериодического фильтра, третий вход второго коммутатора соединен с выходом третьего устройства сравнения, а выход подключен к входу третьего устройства сравнения и ко второму входу второго запоминающего устройства, к третьему входу которого подключен выход второго устройства сравнения, соединенный с третьим входом апериодического фильтра, выход которого подключен ко второму входу пятого сумматора, третий вход третьего коммутатора соединен с выходом второго ограничителя, а второй вход блока умножения соединен с выходом устройства определения знака.
Сущность изобретения поясняется чертежом, на котором представлена функциональная схема заявляемой системы автоматического управления полетом высокоманевренного самолета.
Система содержит ручку 1 управления летчика, датчик 2 положения ручки управления, блок 3 формирования коэффициента Кш усиления по сигналу ручки управления, префильтр 4, первый сумматор 5, второй сумматор 6, привод 7, аэродинамический руль 8, интегральный блок 9 датчиков, изодромный фильтр 10, нелинейный элемент 11 с ограничением и зоной нечувствительности, третий сумматор 12, первый ограничитель 13, первый коммутатор 14, блок 15 деления, первое запоминающее устройство 16, четвертый сумматор 17, второй коммутатор 18, блок 19 умножения, первое устройство 20 сравнения, второе запоминающее устройство 21, второй ограничитель 22, пятый сумматор 23, второе устройство 24 сравнения, блок 25 производной, нелинейный элемент 26 с зоной нечувствительности, устройство 27 определения знака, третье устройство 28 сравнения, третий коммутатор 29 и апериодический фильтр 30.
При автоматическом управлении самолетом летчик, отклоняя ручку 1 управления, формирует с помощью датчика 2 положения ручки управляющий сигнал, который через сумматор 12 и блок 3 формирования коэффициента Кш поступает на префильтр 4, где осуществляется фильтрация данного сигнала и ограничение скорости его изменения. Сигнал φпреф с выхода префильтра 4 через сумматоры 5 и 6 подают на привод 7, с помощью которого отклоняют аэродинамический руль 8, что приводит к изменению параметров движения самолета. Данные параметры, например, нормальная перегрузка, угловая скорость тангажа определяются с помощью интегрального блока 9 датчиков. Сигнал nу нормальной перегрузки с первого выхода интегрального блока 9 датчиков поступает на второй вход сумматора 5, а сигнал ωz угловой скорости тангажа со второго выхода интегрального блока 9 датчиков через изодромный фильтр 10 поступает на второй вход сумматора 6. Данные сигналы nу и ωz предназначены для обеспечения требуемых характеристик устойчивости и управляемости. Однако при определенном уровне управляющего сигнала на ряде режимов полета привод 7 выходит на предельные значения, и система размыкается по сигналам обратных связей. В этом случае в системе применительно к самолету МИГ-29КУБ возникают колебания по нормальной перегрузке, что приводит к неудовлетворительным характеристикам устойчивости и управляемости. Кроме того, при выходе привода 7 на предельные значения возникает «свободный ход» ручки 1 управления летчика, то есть при ее отклонении свыше некоторого значения не происходит изменение нормальной перегрузки, что с точки зрения безопасности полета неприемлемо. Для ликвидации колебаний в системе сигнал с выхода сумматора 5 подают через нелинейный элемент 11 с ограничением и зоной нечувствительности на второй вход префильтра 4, на интегральном устройстве которого выставляют начальные условия, ограничивающие величину сигнала сумматора 5. За счет этого ограничения демпфирующий сигнал угловой скорости тангажа, пропущенный через изодромный фильтр 10, обеспечивает требуемое демпфирование в системе, и колебания ликвидируются.
Ранее отмечалось, что при выходе привода 7 на предельные значения в системе возникает «свободный ход» по перемещению ручки 1 управления летчика, для ликвидации которого в системе вычисляют значение сигнала датчика 2 положения ручки, соответствующего перемещению привода 7 до предельных значений. Для этого используют последовательно соединенные коммутатор 14, на первый вход которого подают сигнал φпреф с выхода префильтра 4, а на второй вход подают сигнал с нелинейного элемента 11 с ограничением и зоной нечувствительности, фиксирующего момент выхода привода 7 на предельные значения (разовая команда РК1), блок 15 деления, на второй вход которого подают сигнал с блока 3 формирования коэффициента Кш, и запоминающее устройство 16. Сигнал с выхода запоминающего устройства 16, соответствующий запомненному значению сигнала датчика 2 положения ручки 1 управления в момент выхода привода 7 на предельные значения
Хрпр=φпреф/Кш, подается на первый вход сумматора 17, на второй вход которого подается сигнал датчика 2 положения ручки управления, пропущенный через ограничитель 13, который необходим для исключения дополнительного перемещения ручки 1 управления при пересиливании (в частности, на самолете МИГ-29КУБ дополнительное перемещение составляет 20 мм при Р=26 кг). Таким образом, на выходе сумматора 17 формируется сигнал разности между текущим значением сигнала датчика 2 положения ручки управления и запомненным значением сигнала в момент выхода привода 7 на предельные значения. Этот сигнал через коммутатор 18, на второй вход которого подается сигнал с нелинейного элемента 11 с ограничением и зоной нечувствительности, при разовой команде РК1 поступает на первый вход блока 19 умножения. На второй вход блока 19 умножения поступает сигнал, сформированный последовательно соединенными блоком 25 производной, на вход которого подают сигнал с ограничителя 13, нелинейным элементом 26 с зоной нечувствительности, величина которой выбирается из условия исключения малых значений производной перемещения ручки 1, обусловленных высокочастотной тряской ручки в процессе управления, и устройством 27 определения знака. При этом если величина сигнала произведения, полученного в результате умножения сигнала разности между текущим значением сигнала датчика положения ручки управления и запомненным значением сигнала в момент выхода привода на предельные значения на сигнал, соответствующий знаку производной перемещения ручки, и поступающего на вход устройства 20 сравнения, меньше нулевого значения, то, следовательно, летчик изменил направление перемещения ручки 1 управления. Сигнал о смене направления перемещения ручки 1 поступает на запоминающее устройство 21, на второй вход которого поступает сигнал с выхода коммутатора 18. Запомненный сигнал через ограничитель 22, ограничивающий сигнал из условия безопасности полета, и через сумматор 23 подают в качестве компенсационного сигнала «свободного хода» ручки 1 на вход сумматора 12. Таким образом, при управляющем воздействии от ручки 1 управления при изменении направления ее перемещения (при подаче компенсационного сигнала) исчезает «свободный ход» ручки. Теперь необходимо определить момент для исключения компенсационного сигнала из управления. Для этого сигнал с выхода коммутатора 18 подают на устройство 28 сравнения и, при величине рассогласования между текущим значением сигнала с датчика 2 положения ручки управления и запомненным в запоминающем устройстве 16, близкой к нулю, формируют в устройстве 28 сравнения разовую команду РК2, поступающую на первый вход коммутатора 29 и подключающую выход ограничителя 22 к первому входу апериодического фильтра 30, сигнал с выхода которого подается на второй вход сумматора 23 со знаком «минус». В результате происходит списание по экспоненциальному закону компенсационного сигнала. Кроме того, при срабатывании устройства 28 сравнения сигнал разовой команды РК2 поступает на третий вход коммутатора 18 и отключает сигнал, поступающий на первый вход множительного устройства 19. Сигнал с выхода сумматора 23 подают на вход устройства 24 сравнения и, при значении сигнала, близком к нулю, формируют разовую команду РКЗ, обнуляющую сигнал на выходе запоминающего устройства 21 (если РК3=1, то УЗ2=0) и выставляющую начальные условия на выходе апериодического фильтра 30 (если РК3=1, то НУ=0). Кроме того, при разовой команде РК1, поступающей с нелинейного элемента 11 с ограничением и зоной нечувствительности, на выходе апериодического фильтра 30 также выставляются нулевые начальные условия (если РК1=1, то НУ=0).
Для реализации заявленной системы автоматического управления полетом высокоманевренного самолета не требуется специального оборудования. Система может быть реализована с использованием бортовой вычислительной машины и интегрального блока датчиков, например ИБД-51.
Как показали результаты моделирования комплексной системы управления КСУ-941, при использовании данной системы автоматического управления полетом высокоманевренного самолета предоставляется возможность при перемещении привода до максимальных значений ликвидировать колебания в системе и «свободный ход» ручки управления летчика, тем самым улучшить характеристики устойчивости и управляемости системы и повысить безопасность полета.
Таким образом, предлагаемая система реализуема и применима, в частности, для высокоманевренного самолета типа МИГ-29КУБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2387578C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2385823C1 |
Изобретение относится к системам автоматического управления полетом высокоманевренного самолета, обеспечивающим характеристики продольной устойчивости и управляемости самолета. Данная система содержит ручку (1) управления летчика с датчиком (2) положения ручки управления, последовательно соединенные сумматор (12), блок (3) формирования коэффициента Кш усиления по сигналу ручки управления, префильтр (4), сумматоры (5) и (6), привод (7) и аэродинамический руль (8), интегральный блок (9) датчиков, изодромный фильтр (10), нелинейный элемент (11) с ограничением и зоной нечувствительности, ограничитель (13), последовательно соединенные коммутатор (14), блок (15) деления, запоминающее устройство (16), сумматор (17), коммутатор (18), блок (19) умножения, устройство (20) сравнения, запоминающее устройство (21), ограничитель (22), сумматор (23) и устройство (24) сравнения. Система содержит последовательно соединенные блок (25) производной, нелинейный элемент (26) с зоной нечувствительности и устройство (27) определения знака и последовательно соединенные устройство (28) сравнения, коммутатор (29) и апериодический фильтр (30). Обеспечивается возможность при перемещении привода до максимальных значений ликвидировать колебания в системе и «свободный ход» ручки управления летчика, и тем самым улучшить характеристики устойчивости и управляемости системы и повысить безопасность полета. 1 ил.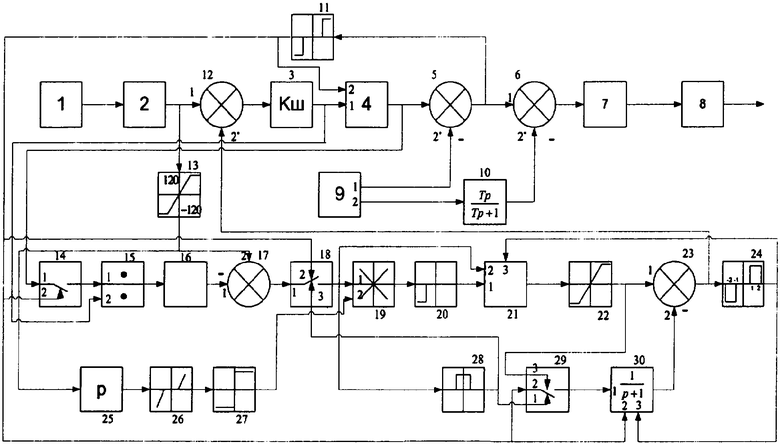
Система автоматического управления полетом высокоманевренного самолета, содержащая ручку управления летчика с датчиком положения ручки управления, последовательно соединенные блок формирования коэффициента усиления по сигналу ручки управления, префильтр, первый сумматор, второй сумматор, привод и аэродинамический руль, интегральный блок датчиков, первый выход которого по сигналу нормальной перегрузки подключен ко второму входу первого сумматора, второй выход по сигналу угловой скорости тангажа через изодромный фильтр подключен ко второму входу второго сумматора, отличающаяся тем, что в нее дополнительно введены нелинейный элемент с ограничением и зоной нечувствительности, третий сумматор, первый ограничитель, последовательно соединенные первый коммутатор, блок деления, первое запоминающее устройство, четвертый сумматор, второй коммутатор, блок умножения, первое устройство сравнения, второе запоминающее устройство, второй ограничитель, пятый сумматор и второе устройство сравнения, последовательно соединенные блок производной, нелинейный элемент с зоной нечувствительности и устройство определения знака и последовательно соединенные третье устройство сравнения, третий коммутатор и апериодический фильтр, причем выход датчика положения ручки управления подключен к первому входу третьего сумматора и к входу первого ограничителя, второй вход третьего сумматора соединен с выходом пятого сумматора, а выход через блок формирования коэффициента усиления по сигналу ручки управления подключен ко второму входу блока деления, выход первого ограничителя подключен к входу блока производной и ко второму входу четвертого сумматора, вход нелинейного элемента с ограничением и зоной нечувствительности соединен с выходом первого сумматора, а выход нелинейного элемента с ограничением и зоной нечувствильности подключен ко второму входу префильтра, выход которого соединен с первым входом первого коммутатора, и ко вторым входам первого, второго и третьего коммутаторов и апериодического фильтра, третий вход второго коммутатора соединен с выходом третьего устройства сравнения, а выход подключен к входу третьего устройства сравнения и ко второму входу второго запоминающего устройства, к третьему входу которого подключен выход второго устройства сравнения, соединенный с третьим входом апериодического фильтра, выход которого подключен ко второму входу пятого сумматора, третий вход третьего коммутатора соединен с выходом второго ограничителя, а второй вход блока умножения соединен с выходом устройства определения знака.
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
RU2040433C1 |
| Система управления углом наклона траектории самолета в продольной плоскости в режиме взлета | 1990 |
|
SU1779638A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2057686C1 |
| US 5863012 A 26.01.1999 | |||
| GB 1239936 A, 21.07.1971 | |||
| US 4607201 A, 19.08.1986. | |||

