Изобретение относится к области медицинской техники, а именно к адаптивным мобильным пространственным роботам-манипуляторам применительно к роботизированному протезированию и протезостроению и предназначено для протезирования верхней конечности, манипуляционных воздействий на нее и обслуживания пациента. Данный протез подходит пациентам независимо от количества ампутированных верхних конечностей, их поперечных размеров и уровня ампутации.
Из уровня техники известны следующие решения.
Известна искусственная рука с цифровым управлением. Устройство представляет собой интегрированный дистанционный манипулятор с цифровым управлением, способный воспроизводить все основные движения предплечья, запястья и кисти человека. (US 4246661. Pinson G.T. Digitally-controlled artificial hand. Jan. 27, 1981. МПК A61F 1/00; A61F 1/06).
Известен протез предплечья, содержащий искусственную электромеханическую кисть с биоэлектрическим управлением приводом, несущую гильзу, соединенную с опорным корпусом и снабженную элементами крепления, приемную гильзу, размещенную в несущей гильзе с возможностью поворота, привод ротации кисти, привод сгибания кисти, разъемный наплечник с возможностью охвата плечевого сустава руки (Буров Г.Н., Большаков В.А. Протез предплечья. Патент РФ на изобретение №2615278. МПК A61F 2/54; A61F 2/56; A61F 2/58; A61F 2/68; A61F 2/72. Опубл. в БИ, №10, 2017).
Известен электромеханический протез кисти на длинную культю предплечья, содержащий корпус, приемную гильзу, каркасы пальцев, механизм движения кисти, систему управления кистью с блоком автономного питания. (Ершов С.В., Лапицкий Д.Ю., Андреев Б.Д., и др. Электромеханическая кисть. Патент РФ на изобретение №2663942. МПК A61F 2/54, A61F 2/56, A61F 2/72. Опубл. в БИ, №23, 2018).
Известно устройство искусственной руки, в котором лучезапястный сустав и сустав большого пальца выполнены в виде пространственных механизмов параллельной структуры (ЕР 1340478 B1. Fig. 14. Yasui, Yuji; Kiyomoto, Hiroshi; Usukura, Isao, et al. Parallel linkage and artificial joint device using the same. 10.10.2007, Bulletin 2007/41. МПК A61F 2/66; B62D 57/02-прототип). При этом в механизме лучезапястного сустава основание в виде плоской монтажной пластины, с одной стороны, жестко соединяется с гильзой культи. С другой стороны основание через четыре стержня изменяемой длины с линейными приводами и один стержень неизменяемой длины с шаровыми шарнирами на их концах подвижно соединено с платформой, жестко связанной с несущей конструкцией кисти руки с подвижными пальцами. При этом большой палец снабжен пространственным механизмом параллельной структуры, основанием которого служит несущая конструкция кисти руки, а подвижная платформа связана с фалангами большого пальца. В свою очередь, пространственный механизм параллельной структуры большого пальца через три стержня изменяемой длины с линейными приводами и один стержень неизменяемой длины с шаровыми шарнирами на их концах подвижно соединяет платформу с фалангами большого пальца с несущей конструкцией кисти руки. Пространственная подвижность механизмов параллельной структуры позволяет приблизить движения искусственных суставов к естественным. После остановки линейных приводов описанные пространственные структуры становится фермами, в которых все стержни работают на растяжение-сжатие. Благодаря этому пространственные механизмы параллельной структуры искусственных суставов обладают более высокими удельной жесткостью и весом по сравнению с электромеханическими протезами рук последовательного действия, в которых несущие элементы конструкции работают на изгиб и кручение. Управление движениями искусственной руки осуществляется от системы управления, включающей контроллер, источник питания, датчик положения сустава. Волевые команды от пациента формируются в имплантированном в его мозг чипе, который электрически связан с датчиком положения сустава и контроллером системы управления. На основе волевых команд и показаний датчика пространственного положения сустава система управления искусственной рукой формирует управляющие команды которые согласованно подаются на исполнительные органы в виде линейных приводов пространственных механизмов параллельной структуры и организуют требуемые пространственные движения подвижных частей искусственной руки. Схватывание предметов осуществляется путем их прижатия механизмом большого пальца к несущей конструкции кисти руки (поверхности, имитирующей ладонь). Кроме того, устройство позволяет передавать волевые команды к системе управления не только через имплантируемый в мозг чип, но и с помощью других средств, таких, например, как датчики обнаружения изменений в потенциале нервной системы, датчики обнаружения движения мышц, а также датчики обнаружения голоса пользователя.
Указанные устройства имеют следующие недостатки:
• отсутствует адаптация протеза к поперечным размерам культи и уровням ампутации верхней конечности и требуется его индивидуальная подгонка;
• самостоятельная установка протезов на культи обеих верхних конечностей крайне затруднена;
• отсутствие очувствления может привести к разрушению хрупких предметов при их схватывании пальцами искусственной кисти;
• отсутствует возможность надежного схватывания разнообразных предметов, независимо от их геометрической формы, размеров и физических свойств материала изготовления;
• отсутствует возможность схватывания нескольких предметов и одновременного манипулирования ими;
• отсутствует возможность самоустановки протеза на культю и его самоснятие, а также самоперемещения внутри помещения, например, до места хранения или/и зарядки источника питания и обратно;
• отсутствие возможности самодоставки пациенту каких-либо предметов, находящихся в помещении;
• отсутствие возможности передачи системе управления протезом информации о пространственных координатах местоположения контактной поверхности культи пациента в помещении;
Техническим результатом предлагаемых адаптивного мобильного пространственного робота-манипулятора для протезирования верхней конечности пациента и способа обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора является снижение массовых характеристик и расширение функциональных возможностей за счет:
• адаптации протеза к поперечным размерам культи и его самоустановки (самоснятия) независимо от уровня ампутации и количества ампутированных конечностей;
• надежного и очувствленного схватывания разнообразных предметов, независимо от их геометрической формы, размеров и физических свойств материала изготовления;
• возможности схватывания нескольких предметов и одновременного манипулирования ими;
• самоперемещения протеза внутри помещения, например, до места его хранения или/и зарядки источника питания и обратно;
• самодоставки пациенту каких-либо предметов, находящихся в помещении с помощью протеза;
• передачи системе управления протезом информации о пространственных координатах местоположения контактной поверхности культи пациента в помещении;
• управления протезом через сотовую связь, беспроводное или спутниковое соединение, а также Интернет.
Это достигается тем, что в адаптивном мобильном пространственном роботе-манипуляторе для протезирования верхней конечности пациента, содержащем искусственный сустав в виде пространственного механизма параллельной структуры с исполнительными органами в виде линейных приводов с датчиками относительного перемещения, механически соединенный со схватом с одной стороны и гильзой культи верхней конечности с датчиком пространственного положения - с другой, систему управления электрически соединенную с датчиком пространственного положения гильзы культи, исполнительными органами и средствами формирования волевых команд пациента, пространственный механизм параллельной структуры выполнен в виде октаэдрального модуля в исходном положении с ребрами в виде стержней, концы которых шарнирно соединены в вершинах октаэдрального модуля, при этом стержни снабжены линейными приводами с осевыми датчиками силы и относительной скорости, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом, одна из граней октаэдрального модуля выполнена стыковочной и снабжена трехупорным упругим стыковочным схватом, а остальные четыре рабочие грани, не имеющих со стыковочной гранью общих линейных приводов, снабжены трехупорными жесткими и трехупорными упругими схватами, при этом каждый из упругих упоров трехупорного схвата выполнен в виде пластин из упругого материала, концы которых жестко соединены с концами соответствующих линейных приводов, образующих соответствующие стыковочную и рабочую грани октаэдрального модуля, при этом пластины из упругого материала установлены на линейных приводах в положении их максимальной длины и с начальным прогибом в сторону центра соответствующей грани, а каждый из трехупорных жестких схватов грани расположен в ее плоскости и выполнен в виде трех двузвенных шарнирных устройств, наружные концы которых соединены цилиндрическими шарнирами с концами соответствующих линейных приводов, образующих данную грань октаэдрального модуля, при этом контактные поверхности упругих упоров стыковочного схвата снабжены электродами и выполнены с возможностью механического и электрического соединения с гильзой культи верхней конечности и расположенными на ней электродами средств формирования волевых команд пациента, а вершины октаэдрального модуля снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде трехосных блоков гироскопов-акселерометров, при этом средства формирования волевых команд, датчики силы, относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, включающей нейрокомпьютер с соответствующим программно-алгоритмическим обеспечением, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, выходы которой через последовательно соединенные цифро-аналоговые преобразователи и усилители мощности электрически соединены с линейными приводами, а также через беспроводное соединение с датчиком пространственного положения гильзы культи верхней конечности, при этом каждая из вершин октаэдрального модуля может быть выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств.
Это достигается тем, что в способе обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора, включающем его установку на гильзу культи верхней конечности и управление пространственным перемещением его элементов путем контроля длин всех стержней линейных приводов и определение пространственных координат его элементов с помощью датчиков относительного перемещения линейных приводов, датчика пространственного положения гильзы культи верхней конечности, системы управления и средств формирования волевых команд пациента, перед установкой адаптивного мобильного пространственного робота-манипулятора на гильзу культи верхней конечности, устанавливают беспроводное соединение между средствами формирования волевых команд пациента и системой управления, затем в систему управления вводят образцы голосовых команд пользователя с характеристиками схватываемых предметов, планировку помещения и координаты предметов пользования, включая устройство беспроводной зарядки источника питания и связывают их с базовой системой координат и самоустанавливают адаптивный мобильный пространственный робот-манипулятор на гильзу культи верхней конечности, при этом культю с гильзой подводят к стыковочной грани и подают голосовую команду системе управления на схватывание гильзы, далее в режиме реального времени по беспроводному соединению в систему управления от датчика пространственного положения гильзы культи верхней конечности поступают ее пространственные координаты относительно базовой системы координат, которые анализируют и формируют управляющие команды к линейным приводам, согласованно изменяют их длины и совмещают плоскость стыковочного схвата со стыковочной плоскостью гильзы культи, после этого линейные приводы отключают и уменьшают длины линейных приводов стыковочного схвата и производят схватывание гильзы культи верхней конечности упругими упорами с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы стыковочной грани отключают и приступают к эксплуатации, при которой используют все свободные схваты, при этом перед схватыванием предмета выбирают плоскость контакта с предметом, организуют согласованное движение культи верхней конечности и соответствующих линейных приводов и совмещают с выбранной плоскостью плоскость схвата, при этом плоскость контакта охватываемого предмета располагают внутри схвата, а плоскость контакта охватывающего предмета располагают снаружи вершин грани схвата и осуществляют согласованное изменение длин ее стержней и схватывают предмет с требуемыми усилиями, которое определяю по показаниям датчиков силы, после этого линейные привода отключают и вычисляют координаты вершин граней относительно базовой системы координат, при этом перед схватыванием предмета голосовой командой называют характеристики предмета, а при голосовом управлении схватом называют его обозначение, далее согласованно двигают культей верхней конечности и изменяют длины стержней свободных граней и осуществляют требуемое манипулирование предметом, далее предмет устанавливают на выбранное место, пространственное положение которого относительно базовой системы координат определяют по показаниям датчиков пространственного положения культи и вершин октаэдрального модуля, а также датчиков относительного перемещения, и согласованно изменяют длины стержней грани схвата и предмет освобождают от схвата и приступают к дальнейшей эксплуатации адаптивного мобильного пространственного робота-манипулятора, после окончания эксплуатации пациент подает голосовую команду на освобождение гильзы культи от стыковочного схвата и подзарядку источника питания, при этом длины стержней стыковочной грани увеличивают, гильзу освобождают и соответствующие линейные привода выключают, и устанавливают контакт одной из граней октаэдрального модуля с поверхностью перемещения, уменьшают длины ее стержней до минимального значения и соответствующие линейные приводы выключают, далее по показаниям датчиков пространственного положения вершин октаэдрального модуля в системе управления определяют их пространственные координаты относительно базовой системы координат, сравнивают с пространственными координатами устройства беспроводной зарядки источника питания, формируют маршрут следования, траекторию которого при необходимости разбивают на повороты и прямолинейные участки, и алгоритм управляющих команд на линейные привода октаэдрального модуля, затем согласованно изменяют длины линейных приводов и организуют ползающее движение октаэдрального модуля по контактируемой поверхности до конечного пункта маршрута следования, при этом прямолинейный участок траектории прокладывают от вершины контактируемой с поверхностью грани близлежащей к конечному пункту маршрута следования или точке поворота к следующему прямолинейному участку траектории, далее организуют поворот биссектрисы, проходящей через лежащую на траектории вершину и совмещают ее с прямолинейным участком траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону лежащей на траектории и наиболее удаленной от нее вершин и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на близлежащую к траектории вершину, после этого выключают соответствующие линейные привода и увеличивают длину стержня, соединяющего не лежащие на траектории вершины, при этом близлежащую к траектории вершину перемещают и поворачивают связанный с ним стержень относительно вершины лежащей на траектории на угол 30 градусов относительно траектории и соответствующий привод выключают, после этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону перемещенной вершины и вершины лежащей на траектории и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на третью вершину и выключают соответствующие линейные привода, далее максимально уменьшают длину стержня соединяющего вершины не лежащие на траектории, при этом биссектрису проходящую через лежащую на траектории вершину совмещают с прямолинейным участком траектории и соответствующий привод выключают, затем организуют прямолинейное движение октаэдрального модуля вдоль траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону не лежащих на траектории вершин и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на лежащую на траектории вершину, после этого выключают соответствующие линейные привода и синхронно увеличивают длины стержней связанных с вершиной, лежащей на траектории и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов и соответствующие приводы выключают и синхронно увеличивают длины стержней связанных с вершиной лежащей на траектории и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов и соответствующие приводы выключают, после этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону вершины лежащей на траектории и обеспечивают превышение давления от веса октаэдрального модуля на нее по отношению к суммарному давлению от веса октаэдрального модуля на вершины не лежащие на траектории, после этого выключают соответствующие линейные привода и синхронно уменьшают длины стержней связанных с вершиной лежащей на траектории и симметрично и прямолинейно перемещают не лежащие на траектории вершины относительно траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов и соответствующие приводы выключают, после этого алгоритм прямолинейного движения октаэдрального модуля повторяют и обеспечивают его перемещение до конечного пункта маршрута или до точки поворота к следующему прямолинейному участку и алгоритм поворота и прямолинейного движения повторяют, затем все линейные приводы выключают, заряжают источник питания и включают режим ожидания команд, которые пациент передает системе управления через средства формирования волевых команд пациента.
При этом для перемещения октаэдрального модуля по неровной поверхности организуют его перекатывающееся движение, при котором согласованно увеличивают длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести октаэдрального модуля за пределы линии, проходящей через точки контакта с поверхностью двух выбранных смежных вершин и осуществляют плавный поворот октаэдрального модуля до контакта смежной грани с поверхностью, после этого длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее выбирают следующую ось поворота октаэдрального модуля и алгоритм перекатывающегося движения повторяют.
При этом для перемещения октаэдрального модуля по неровной поверхности и недостаточным рабочим ходом линейных приводов организуют его перекатывающееся движение с использованием сил инерции, при котором длину стержней согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на октаэдральный модуль действуют силы инерции, которые поворачивают его относительно оси между точками контакта с поверхностью выбранных вершин, после этого длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее выбирают следующую ось поворота октаэдрального модуля и алгоритм перекатывающегося движения с использованием сил инерции повторяют.
При этом для преодоления препятствий на пути перемещения октаэдрального модуля организуют его прыгающее движение с использованием сил инерции, при котором перед прыжком вертикальные стержни ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на октаэдральный модуль действуют силы инерции, которые отрывают его от поверхности и перемещают в заданном направлении, после окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее продолжают движение октаэдрального модуля по выбранному алгоритму.
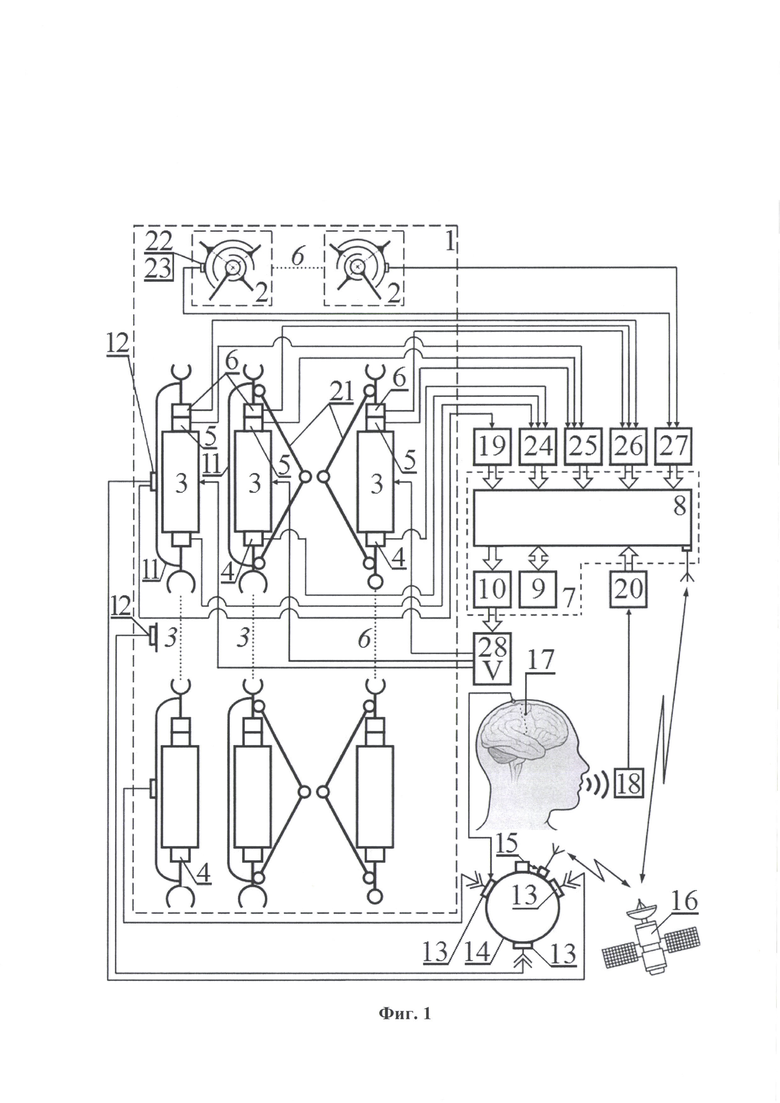
На фиг. 1 представлено схематическое изображение октаэдрального модуля ABCDEF адаптивного мобильного пространственного робота-манипулятора для протезирования верхней конечности пациента. Стрелками показаны направления возможных изменений длин линейных приводов ребер октаэдрального модуля ABCDEF.
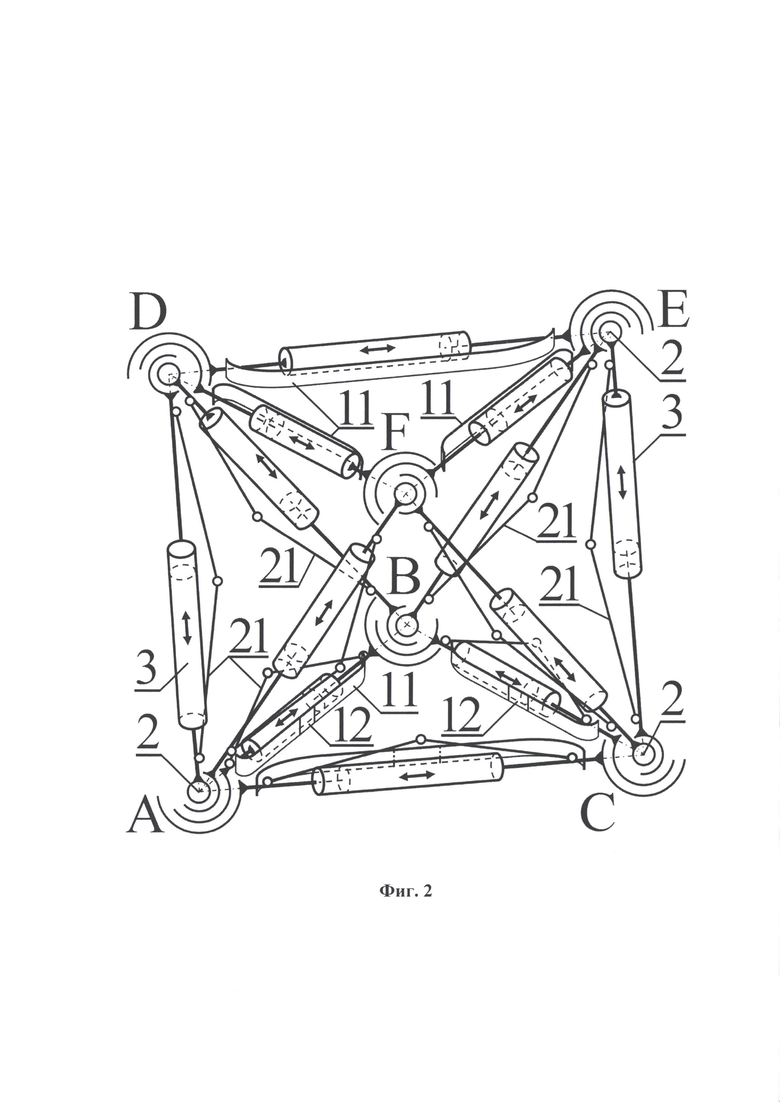
На фиг. 2 представлена структурная схема адаптивного мобильного пространственного робота-манипулятора для протезирования верхней конечности.
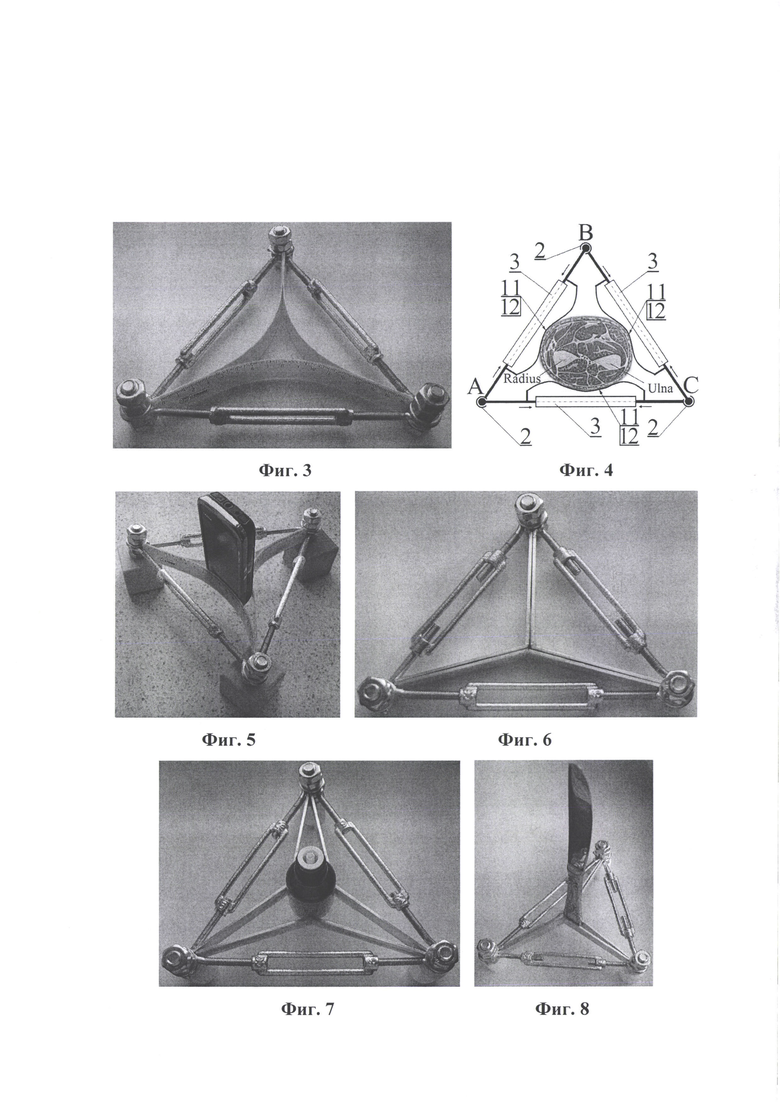
На фиг. 3 показан прототип грани октаэдрального модуля с трехупорным упругим схватом.
На фиг. 4 показана схема фиксации стыковочной грани с трухупорным упругим схватом на предплечье.
На фиг. 5 показан пример фиксации мобильного телефона с помощью прототипа трухупорного упругого схвата.
На фиг. 6 показан прототип грани октаэдрального модуля с трехупорным жестким схватом.
На фиг. 7 показан пример фиксации пузырька с лекарством с помощью прототипа трухупорного жесткого схвата.
На фиг. 8 показан пример фиксации ножа с помощью прототипа трухупорного жесткого схвата.
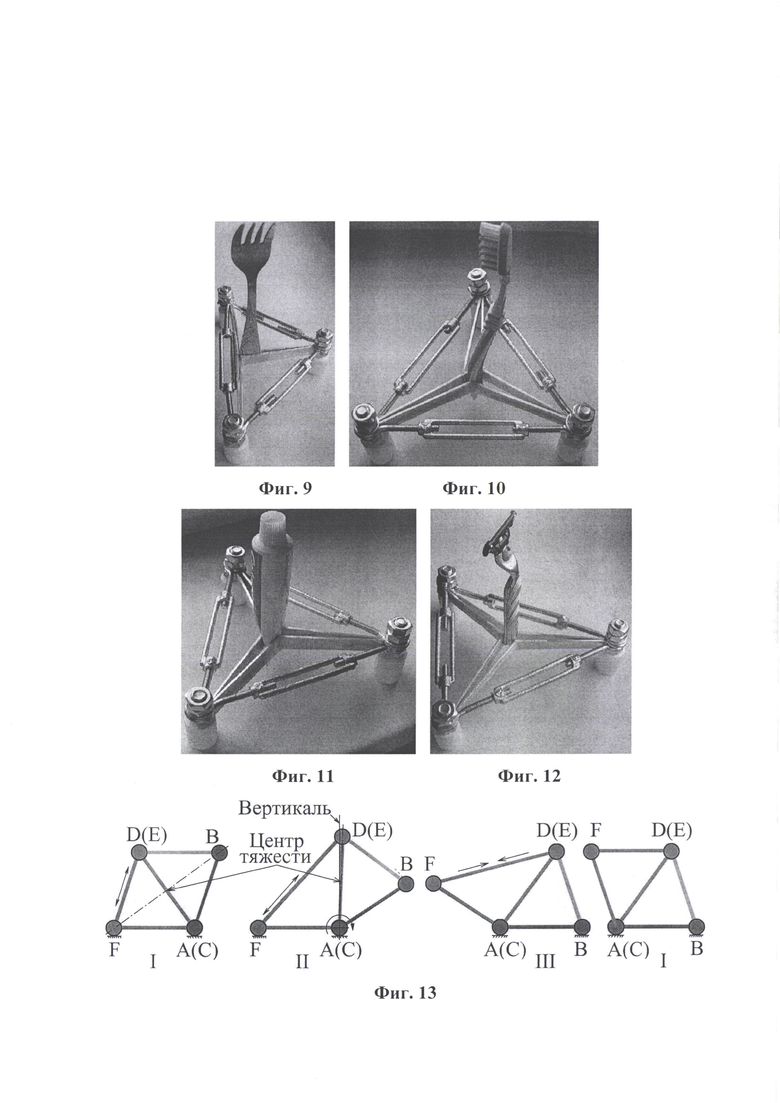
На фиг. 9 показан пример фиксации вилки с помощью прототипа трухупорного жесткого схвата.
На фиг. 10 показан пример фиксации зубной щетки с помощью прототипа трухупорного жесткого схвата.
На фиг. 11 показан пример фиксации тюбика с зубной пастой с помощью прототипа трухупорного жесткого схвата.
На фиг. 12 показан пример фиксации бритвенного станка с помощью прототипа трухупорного жесткого схвата.
На фиг. 13 показана схема перемещения октаэдрального модуля ABCDEF путем организации перекатывающегося движения по горизонтальной или наклонной поверхности за счет смещения его центра тяжести.
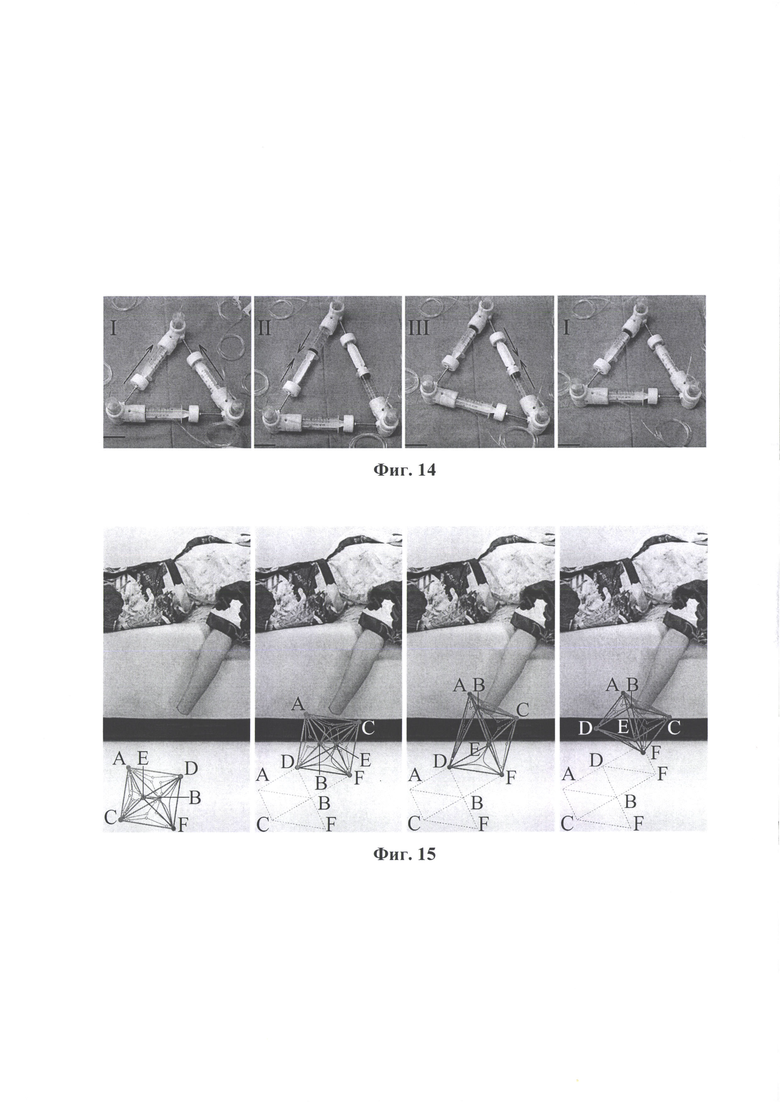
На фиг. 14 показано перемещение прототипа грани октаэдрального модуля ABCDEF путем организации ползания по-пластунски.
На фиг. 15 показан пример возможного перемещения октаэдрального модуля ABCDEF адаптивного мобильного пространственного робота-манипулятора для протезирования верхней конечности пациента по горизонтальной поверхности внутри помещения от места его локального расположения до культи верхней конечности пациента и его самоустановка на ней.
Адаптивный мобильный пространственный робот-манипулятор для протезирования верхней конечности пациента, выполнен в виде октаэдрального модуля (ОМ) ABCDEF 1 в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах 2 ОМ 1 (фиг. 1). Каждый из стержней снабжен линейным приводом 3 с осевыми датчиками силы 4, относительного перемещения, 5 и относительной скорости 6 и выполнен с возможностью изменения своей длины по управляющим командам на его линейный привод 3 от системы управления (СУ) 7, включающей нейрокомпьютер 8 с соответствующим программно-алгоритмическим обеспечением 9 (фиг. 2) и цифро-аналоговыми преобразователями (ЦАП) 10. Концы линейных приводов 3 всех стержней, образующих ОМ 1 соединены с помощью сферических или эквивалентных им шарниров в его вершинах 2. При этом одна из граней ОМ 1, например DEF, выполнена стыковочной и снабжена трехупорным упругим схватом, каждый из упоров которого выполнен в виде упругой пластины 11 с электродом 12. При этом электроды 12 установлены на контактной поверхности пластин 11 с возможностью механического и электрического соединения с соответствующими электродами 13, расположенными на контактной поверхности гильзы культи 14 верхней конечности. На гильзе культи 14 верхней конечности установлен датчик пространственного положения 15, который через беспроводное соединение глобальной системы позиционирования GPS-ГЛОНАСС 16 связан с нейрокомпьютером 8. Пациент связан с СУ 7 через средства формирования волевых команд, включающие имплантированный в его мозг чип 17, датчик обнаружения изменений потенциала нервной системы (на фигуре 1 условно не показан), датчик обнаружения движения мышц (на фигуре 1 условно не показан), датчик звуковых колебаний 18, а также их комбинации. При этом чип 17 и датчики обнаружения изменений потенциала нервной системы и движения электрически связаны с СУ 7 через, электроды 13 и 12 и аналого-цифровые преобразователи (АЦП) 19, а датчик звуковых колебаний 18 - через звуковые волны голосовых команд пациента и АЦП 20. Концы упругой пластины 11 жестко соединены с концами соответствующего линейного привода 3 и установлены на нем в положении его максимальной длины и с начальным прогибом в сторону центра данной грани. При этом остальные четыре грани ОМ 1, не имеющие со стыковочной гранью общих линейных приводов 3, снабжены трехупорными упругими схватами без электродов, кинематически подобными стыковочному, и/или трехупорными жесткими схватами в виде трех двухзвенных шарнирных устройств 21, наружные концы которых соединены цилиндрическими шарнирами с концами соответствующих линейных приводов 3. Внутренние концы двухзвенных шарнирных устройств 21, соответствующей грани ОМ 1 соединены цилиндрическими шарнирами с образованием адаптивных схватов (фиг. 1-2). При необходимости каждая из вершин 2 может быть выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств (на фигурах условно не показаны).
Вершины 2 ОМ 1 снабжены совмещенными датчиками пространственного положения 22 и ускорений 23, которые выполнены в виде трехосных блоков гироскопов-акселерометров и служат для оперативного контроля пространственного положения каждой из вершин 2 и виброускорений вдоль каждой из осей стержней с линейными приводами 3.
Входы СУ 7 через шины данных АЦП подключены соответственно к выходам АЦП 24 датчиков силы 4, АЦП 25 датчиков относительного перемещения 5, АЦП 26 датчиков относительной скорости 6; АЦП 27 совмещенных датчиков пространственного положения и ускорений 22 и 23, а выходы СУ 7 через шины выходных данных подключены к соответствующим входам программно-алгоритмического обеспечения 9 и последовательно соединенных ЦАП 10, усилителей мощности 28 и исполнительных органов в виде линейных приводов 3. При этом СУ 7 и система энергопитания (на фигурах условно не показана) выполнены автономными.
Адаптивный мобильный пространственный робот-манипулятор для протезирования верхней конечности пациента, выполненный в виде ОМ 1 (в исходном положении), работает следующим образом.
ОМ 1 является базовым элементом и позволяет объединяться через любую из граней (кроме стыковочной) с подобными модулями с образованием двух и многомодульных манипуляционных структур. Для этого перед объединением удаляют одну из стыкуемых граней вместе с ее вершинами 2, а образовавшиеся свободные концы боковых граней шарнирно подсоединяют к свободным концам вершин 2.
Каждая из граней ОМ 1 снабжена трехупорным упругим или трехупорным жестким схватом. (фиг. 1, 2, 15). При этом стыковочный трехупорный упругий схват предназначен для самоустановки ОМ 1 на гильзе культи верхней конечности (фиг. 1,4, 15), а остальные трехупорные упругие схваты - для схватывания предметов с разнообразной геометрической формой и размерами, а также физическими свойствами материала. Схватывание предметов и гильзы культи 14 происходит путем уменьшения длин линейных приводов 3 соответствующих граней ОМ 1 и последующего контакта упругих пластин 11 или двухзвенных шарнирных устройств 21 с поверхностью схватываемого предмета с заданным сжимающим усилием. Процесс схватывания предмета прекращается либо по сигналам от осевых датчиков силы 4, либо по голосовой команде пациента, например, «СТОП». На фиг. 3-12 показаны примеры организации схватывания и фиксации предметов с разнообразной геометрической формой, размерами и физическими свойствами материала с помощью прототипов трехупорных упругих (фиг. 3-5) и жестких (фиг. 6-12) схватов. Кроме того на контактной поверхности упругих и жестких схватов при необходимости могут быть установлены датчики температуры (на фиг. не показаны). С помощью датчиков относительного перемещения 5, датчиков пространственного положения 15 и 22 осуществляется контроль позиционирования схватываемого предмета в пространстве, а с помощью осевых датчиков силы 4, датчиков относительной скорости 6 и датчиков ускорений 23 - скорости и ускорения движений схватов, а также ударно-вибрационных воздействий на схваченный предмет.
При этом сигналы от датчиков поступают на входы АЦП 19, 20, 24-27 и через шину данных в нейрокомпьютер 8 СУ 7. После обработки в реальном масштабе времени данных с использованием соответствующего программно-алгоритмического обеспечения 9, формируются управляющие команды, которые через ЦАП 10 и усилители мощности 28 поступают на исполнительные органы (линейные привода 3), и ОМ 1 изменяет свою геометрическую форму (трансформируется).
Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора для протезирования его верхней конечности реализуется следующим образом. Способ включает установку адаптивного мобильного пространственного робота-манипулятора в виде ОМ 1 на гильзу культи 14 верхней конечности (фиг. 1, 4, 15), управление пространственным перемещением его элементов путем контроля с помощью датчиков относительного перемещения 5 длин всех стержней линейных приводов 3 и определение пространственных координат его элементов с помощью датчиков относительного перемещения 5 линейных приводов 3, датчика пространственного положения 15 гильзы культи 14 верхней конечности и датчиков пространственного положения 22 вершин 2 ОМ 1, СУ 7 и средств формирования волевых команд пациента. При этом перед установкой ОМ 1 на гильзу культи 14 верхней конечности пациента, устанавливают беспроводное соединение между средствами формирования волевых команд пациента, включающие имплантированный в его мозг чип 17, датчик обнаружения изменений потенциала нервной системы (на фигуре 1 условно не показан), датчик обнаружения движения мышц (на фигуре 1 условно не показан), датчик звуковых колебаний 18, а также их комбинации, и СУ 7 (фиг. 1). После этого в СУ 7 вводят образцы голосовых команд пользователя с характеристиками схватываемых предметов, планировку помещения и координаты предметов пользования, включая устройство беспроводной зарядки источника питания и связывают их с базовой системой координат и самоустанавливают ОМ 1 на гильзу культи 14 верхней конечности. При этом культю с гильзой 14 подводят к стыковочной грани и подают голосовую команду СУ 1 на схватывание гильзы 14, далее в режиме реального времени по беспроводному соединению в СУ 7 от датчика пространственного положения 15 гильзы культи 14 верхней конечности поступают ее пространственные координаты относительно базовой системы координат, которые анализируют и формируют управляющие команды к линейным приводам 3. Далее, согласованно изменяют длины линейных приводов 3 стержней ОМ 1 (AD, АЕ, BD, BF, CF, СЕ) таким образом, чтобы совместить плоскость стыковочного схвата ОМ1 (стыковочная грань ABC) со стыковочной плоскостью гильзы культи 14 (фиг. 15). После этого линейные приводы 3 стержней ОМ1 (AD, АЕ, BD, BF, CF, СЕ) отключают и уменьшают длины линейных приводов 3 стержней АВ, ВС, СА стыковочного схвата ОМ 1 и производят схватывание гильзы культи 14 верхней конечности упругими упорами с заданными усилиями, которые определяют по показаниям осевых датчиков силы 4. После этого линейные приводы 3 стыковочной грани ABC отключают и приступают к эксплуатации ОМ 1, при которой используют все свободные схваты (грани DEF, DBF, FCE, DAE). При этом перед схватыванием предмета выбирают плоскость контакта с предметом, организуют согласованное движение культи 14 верхней конечности и соответствующих линейных приводов 3 и совмещают с выбранной плоскостью плоскость схвата. При этом плоскость контакта охватываемого предмета располагают внутри схвата, а плоскость контакта охватывающего предмета располагают снаружи вершин грани схвата и осуществляют согласованное изменение длин ее стержней с помощью соответствующих линейных приводов 3 и схватывают предмет с требуемыми усилиями, которое определяют по показаниям осевых датчиков силы 4. После этого линейные привода 3 отключают и вычисляют координаты вершин 2 граней ОМ 1 относительно базовой системы координат. При этом перед схватыванием предмета голосовой командой называют характеристики предмета (например, «мягкий предмет», «твердый предмет», «хрупкий предмет» и т.д.), а при голосовом управлении схватом называют его обозначение (например, ABC DEF, DBF, FCE, DAE или «схват 1, 2, 3, 4, 5»). Далее совершают требуемое пространственное манипулирование предметом путем согласованных движений гильзы культи 14 верхней конечности и изменения длины стержней свободных граней ОМ 1. После установки предмета на выбранное место, пространственное положение которого относительно базовой системы координат определяют по показаниям датчиков пространственного положения 15 гильзы культи 14 и датчиков пространственного положения 22 вершин 2 ОМ 1, а также датчиков относительного перемещения 5, согласованно увеличивают длины стержней грани схвата до момента освобождения предмета от схвата, о котором судят по показаниям его осевых датчиков силы 4 и датчиков относительного перемещения 5 и продолжают эксплуатацию ОМ 1. После окончания эксплуатации ОМ 1 пациент подает голосовые команды на освобождение гильзы культи 14 от стыковочного схвата ABC и подзарядку источника питания ОМ 1. При этом длины стержней стыковочной грани ABC увеличивают и после освобождения гильзу культи 14 верхней конечности от схвата, выключают соответствующие линейные привода 3 и устанавливают контакт одной из граней ОМ 1 с поверхностью перемещения. Далее уменьшают длины всех стержней ОМ 1 до минимальных значений и линейные приводы 3 выключают. После этого по показаниям датчиков пространственного положения 22 вершин 2 ОМ 1 в СУ 7 определяют их пространственные координаты относительно базовой системы координат, сравнивают с пространственными координатами устройства беспроводной зарядки источника питания, формируют маршрут следования, траекторию которого при необходимости разбивают на повороты и прямолинейные участки, и алгоритм управляющих команд на линейные привода 3 ОМ 1. Затем согласованно изменяют длины линейных приводов 3 и организуют ползающее движение ОМ 1 по контактируемой поверхности до конечного пункта маршрута следования. При этом прямолинейный участок траектории прокладывают от вершины 2 контактируемой с поверхностью грани ОМ 1 близлежащей к конечному пункту маршрута следования или точке поворота к следующему прямолинейному участку траектории. Далее организуют поворот биссектрисы, проходящей через лежащую на траектории вершину 2 ОМ 1 и совмещают ее с прямолинейным участком траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения. Затем смещают проекцию центра тяжести ОМ 1 на контактируемую поверхность в сторону лежащей на траектории и наиболее удаленной от нее вершин и обеспечивают превышение давления от веса ОМ 1 на каждую из них по отношению к давлению от веса октаэдрального модуля на близлежащую к траектории вершину. После этого выключают соответствующие линейные привода 3 и увеличивают длину стержня, соединяющего не лежащие на траектории вершины, при этом близлежащую к траектории вершину 2 перемещают и поворачивают связанный с ним стержень относительно вершины лежащей на траектории на угол 30 градусов относительно траектории и соответствующий привод выключают, после этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести ОМ 1 на контактируемую поверхность в сторону перемещенной вершины и вершины лежащей на траектории и обеспечивают превышение давления от веса ОМ 1 на каждую из них по отношению к давлению от веса ОМ 1 на третью вершину и выключают соответствующие линейные привода 3. Далее максимально уменьшают длину стержня соединяющего вершины не лежащие на траектории, при этом биссектрису проходящую через лежащую на траектории вершину совмещают с прямолинейным участком траектории и соответствующий линейный привод 3 выключают. Затем организуют прямолинейное движение ОМ 1 вдоль траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести ОМ 1 на контактируемую поверхность в сторону не лежащих на траектории вершин и обеспечивают превышение давления от веса ОМ 1 на каждую из них по отношению к давлению от веса ОМ 1 на лежащую на траектории вершину. После этого выключают соответствующие линейные привода 3 и синхронно увеличивают длины стержней связанных с вершиной, лежащей на траектории и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения 5 линейных приводов 3 и соответствующие линейные приводы выключают и синхронно увеличивают длины стержней связанных с вершиной, лежащей на траектории и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения 5 линейных приводов 3 и соответствующие линейные приводы 3 выключают. После этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести ОМ 1 на контактируемую поверхность в сторону вершины лежащей на траектории и обеспечивают превышение давления от веса ОМ 1 на нее по отношению к суммарному давлению от веса ОМ 1 на вершины не лежащие на траектории. После этого выключают соответствующие линейные привода 3 и синхронно уменьшают длины стержней связанных с вершиной лежащей на траектории и симметрично и прямолинейно перемещают не лежащие на траектории вершины относительно траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения 5 линейных приводов 3 и соответствующие линейные приводы 3 выключают. После этого алгоритм прямолинейного движения ОМ 1 повторяют и обеспечивают его перемещение до конечного пункта маршрута или до точки поворота к следующему прямолинейному участку и алгоритм поворота и прямолинейного движения повторяют, затем все линейные приводы 3 выключают, заряжают источник питания и включают режим ожидания команд, которые пациент передает системе управления через средства формирования волевых команд пациента. Пример перемещения прототипа контактирующей грани ОМ 1 по гладкой горизонтальной поверхности путем организации ее ползания по-пластунски показан на фиг. 14.
В случае неровной контактируемой поверхности или наличии на ней препятствующих предметов с размерами меньшими размеров внутренней поверхности граней ОМ 1 при минимальной длине их стержне, организуют перекатывающееся движение ОМ 1. При этом согласованно увеличивают длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения и смещают проекцию центра тяжести ОМ 1 за пределы линии, проходящей через точки контакта с поверхностью двух выбранных смежных вершин 2 и осуществляют плавный поворот ОМ 1 до контакта смежной грани с поверхностью. После этого длины стержней уменьшают до первоначального состояния и соответствующие линейные приводы 3 выключают. Далее выбирают следующую ось поворота ОМ 1 модуля и алгоритм перекатывающегося движения повторяют. На фиг. 13 показана схема перемещения ОМ 1 ABCDEF путем организации перекатывающегося движения по горизонтальной или наклонной поверхности за счет смещения его центра тяжести. Так, например, на начальном этапе I все стержни ОМ 1 имеют одинаковую длину, а грань FAC является контактирующей с поверхностью. На этапе II стержни FD и FE увеличивают до момента, пока центр тяжести ОМ 1 не переместится вправо от вертикальной плоскости, проходящей через вершины А и С. В результате произойдет поворот ОМ 1 относительно оси АС и контактирующей станет грань ABC (этап III). Далее стержни FD и FE уменьшают до первоначальной длины и ОМ 1 принимает исходное положение (этап I). После этого алгоритм перемещения путем перекатывания ОМ 1 по горизонтальной или наклонной поверхности повторяют.На фиг. 15 показан пример перекатывающегося перемещения ОМ 1 ABCDEF по горизонтальной поверхности внутри помещения от места его локального расположения до культи верхней конечности пациента и его самоустановка на ней.
В случае недостаточного рабочего хода линейных приводов 3 при организации перекатывающегося движения ОМ 1, например, вверх по наклонной поверхности, его перекатывание может быть организовано с использованием сил инерции. При этом длину стержней согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы 3 в заданный момент времени, которые определяют с помощью датчиков относительного перемещения 5, относительной скорости 6, совмещенных датчиков пространственного положения 22 и ускорений 23. В результате кроме момента от силы тяжести на ОМ 1 будут действовать моменты от сил инерции, направленные в противоположную сторону, которые после достижения превышающего значения осуществят перекат ОМ 1 с одной грани на другую. При этом потребуется меньшее значение величины рабочего хода линейных приводов 3 по сравнению в предыдущим случаем. После перекатывания длины выдвинутых стержней стержней уменьшают до первоначального состояния и соответствующие линейные приводы 3 выключают. Далее выбирают следующую ось поворота ОМ 1 и алгоритм перекатывающегося движения с использованием сил инерции повторяют.
В случае наличия на пути перемещения ОМ 1 препятствий разноуровневых поверхностей со ступенью, а также крупногабаритных длинномерных предметов типа железнодорожного пути и т.д. для их преодоления организуют прыгающее движение ОМ 1 с использованием сил инерции. При этом перед прыжком вертикальные стержни ОМ 1 ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы 3 в заданный момент времени, который определяют с помощью датчиков относительного перемещения 5, относительной скорости 6, совмещенных датчиков пространственного положения 22 и ускорений 23. При этом на ОМ 1 действуют силы инерции, которые отрывают его от контактируемой поверхности и перемещают в заданном направлении, после окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие линейные приводы 3 выключают, далее продолжают движение ОМ 1 по выбранному алгоритму.
Применение в составе СУ 7 нейрокомпьютера 8 с соответствующим программно-алгоритмическим обеспечением 9 позволяет организовать работу в приведенных режимах в масштабе реального времени.
Приведенные адаптивный мобильный пространственный робот-манипулятор и способ организации движений при обслуживании и ремонте линий электропередач могут быть реализованы на базе имеющихся на сегодняшний день разработок и функционирующих устройств. Так, известны «Адаптивный мобильный пространственный реабилитационный робот-манипулятор и способ организации движений и диагностики пациента с его помощью» (Патент РФ на изобретение №2564754. МПК А61Н 1/00. Опубл. в БИ, №28, 2015). В описании патента представлены сведения о возможностях организации различных операций с помощью адаптивного мобильного пространственного робота-манипулятора, выполненного на основе октаэдрального модуля.
Сведения о возможности реализации совмещенных датчиков пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, выполненных, например, в виде микромеханических вибрационных гироскопов-акселерометров, представлены в описании реализованного технического решения «Микромеханический вибрационный гироскоп-акселерометр» (Патент РФ на изобретение №2162229. МПК G01P 15/08, G01C 19/56. Опубл. в БИ, №2, 2001).
В качестве линейных приводов могут быть использованы широко применяемые в машиностроении электромеханические, гидравлические и пневматические линейные приводы. В качестве приведенных в описании устройства датчиков силы, относительной скорости, относительного перемещения, температуры, а также шарнирных соединений линейных приводов с вершинами октаэдрального модуля могут быть применены типовые датчики и узлы, широко известные в машиностроении и робототехнике.
Положительный эффект заявляемого адаптивного мобильного пространственного робота-манипулятора для протезирования верхней конечности пациента и способа обслуживания пациента с его помощью является снижение массовых характеристик и расширение функциональных возможностей за счет:
• адаптации протеза к поперечным размерам культи и его самоустановки (самоснятия) независимо от уровня ампутации и количества ампутированных конечностей;
• надежного и очувствленного схватывания разнообразных предметов, независимо от их геометрической формы, размеров и физических свойств материала изготовления;
• возможности схватывания нескольких предметов и одновременного манипулирования ими;
• самоперемещения протеза внутри помещения, например, до места его хранения или/и зарядки источника питания и обратно;
• самодоставки пациенту каких-либо предметов, находящихся в помещении с помощью протеза;
• передачи системе управления протезом информации о пространственных координатах местоположения контактной поверхности культи пациента в помещении;
• управления протезом через сотовую связь, беспроводное или спутниковое соединение, а также Интернет.
Группа изобретений относится к медицине, а именно к адаптивным пространственным роботам-манипуляторам для протезирования верхней конечности пациента. Робот содержит искусственный сустав в виде пространственного механизма параллельной структуры. Пространственный механизм параллельной структуры выполнен в виде октаэдрального модуля (1) в исходном положении с ребрами в виде стержней, концы которых шарнирно соединены в вершинах (2) октаэдрального модуля. Стержни снабжены линейными приводами (3) с осевыми датчиками силы (4) и относительной скорости (6). Стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления. Одна из граней октаэдрального модуля выполнена стыковочной и снабжена трехупорным упругим стыковочным схватом. Остальные четыре рабочие грани, не имеющие со стыковочной гранью общих линейных приводов, снабжены трехупорными жесткими и трехупорными упругими схватами. Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора включает его установку на гильзу культи верхней конечности и управление пространственным перемещением его элементов путем контроля длин всех стержней линейных приводов. Достигается снижение массовых характеристик и расширение функциональных возможностей протеза. 2 н. и 3 з.п. ф-лы, 15 ил.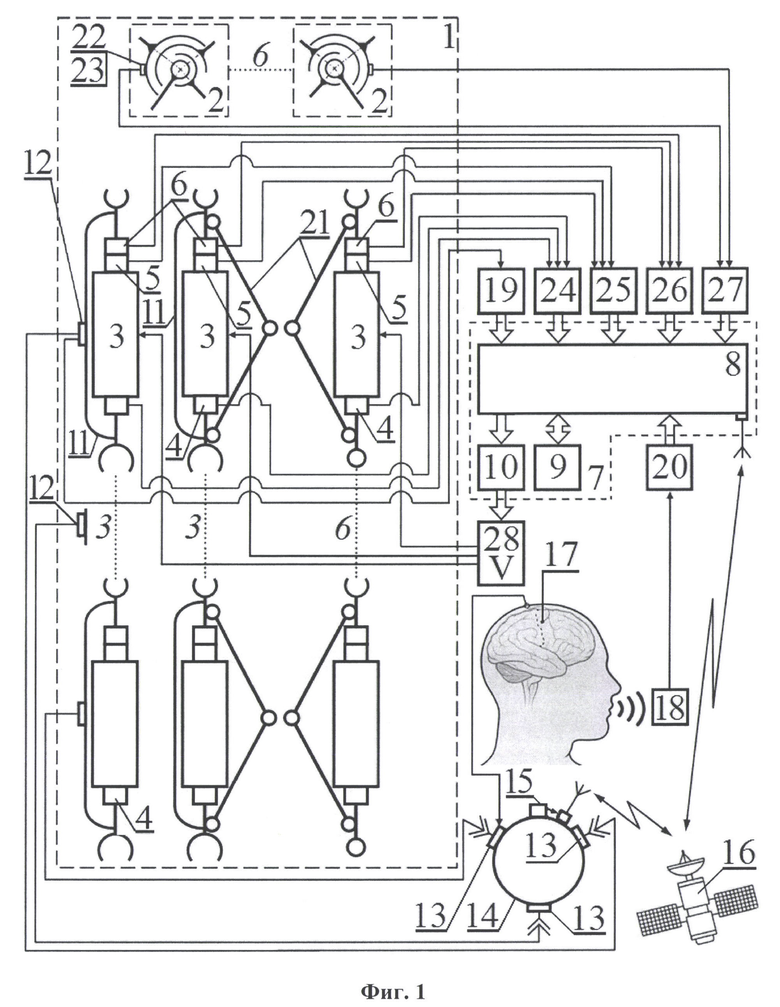
1. Адаптивный мобильный пространственный робот-манипулятор для протезирования верхней конечности пациента, содержащий искусственный сустав в виде пространственного механизма параллельной структуры с исполнительными органами в виде линейных приводов с датчиками относительного перемещения, механически соединенный со схватом с одной стороны и гильзой культи верхней конечности с датчиком пространственного положения - с другой, систему управления электрически соединенную с датчиком пространственного положения гильзы культи, исполнительными органами и средствами формирования волевых команд пациента, отличающийся тем, что пространственный механизм параллельной структуры выполнен в виде октаэдрального модуля в исходном положении с ребрами в виде стержней, концы которых шарнирно соединены в вершинах октаэдрального модуля, при этом стержни снабжены линейными приводами с осевыми датчиками силы и относительной скорости, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом одна из граней октаэдрального модуля выполнена стыковочной и снабжена трехупорным упругим стыковочным схватом, а остальные четыре рабочие грани, не имеющие со стыковочной гранью общих линейных приводов, снабжены трехупорными жесткими и трехупорными упругими схватами, при этом каждый из упругих упоров трехупорного схвата выполнен в виде пластин из упругого материала, концы которых жестко соединены с концами соответствующих линейных приводов, образующих соответствующие стыковочную и рабочую грани октаэдрального модуля, при этом пластины из упругого материала установлены на линейных приводах в положении их максимальной длины и с начальным прогибом в сторону центра соответствующей грани, а каждый из трехупорных жестких схватов грани расположен в ее плоскости и выполнен в виде трех двузвенных шарнирных устройств, наружные концы которых соединены цилиндрическими шарнирами с концами соответствующих линейных приводов, образующих данную грань октаэдрального модуля, при этом контактные поверхности упругих упоров стыковочного схвата снабжены электродами и выполнены с возможностью механического и электрического соединения с гильзой культи верхней конечности и расположенными на ней электродами средств формирования волевых команд пациента, а вершины октаэдрального модуля снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде трехосных блоков гироскопов-акселерометров, при этом средства формирования волевых команд, датчики силы, относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, включающей нейрокомпьютер с соответствующим программно-алгоритмическим обеспечением, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, выходы которой через последовательно соединенные цифроаналоговые преобразователи и усилители мощности электрически соединены с линейными приводами, а также через беспроводное соединение с датчиком пространственного положения гильзы культи верхней конечности, при этом каждая из вершин октаэдрального модуля может быть выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств.
2. Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора, выполненного по п. 1, включающий его установку на гильзу культи верхней конечности и управление пространственным перемещением его элементов путем контроля длин всех стержней линейных приводов и определения пространственных координат его элементов с помощью датчиков относительного перемещения линейных приводов, датчика пространственного положения гильзы культи верхней конечности, системы управления и средств формирования волевых команд пациента, отличающийся тем, что перед установкой адаптивного мобильного пространственного робота-манипулятора на гильзу культи верхней конечности устанавливают беспроводное соединение между средствами формирования волевых команд пациента и системой управления, затем в систему управления вводят образцы голосовых команд пользователя с характеристиками схватываемых предметов, планировку помещения и координаты предметов пользования, включая устройство беспроводной зарядки источника питания, и связывают их с базовой системой координат и самоустанавливают адаптивный мобильный пространственный робот-манипулятор на гильзу культи верхней конечности, при этом культю с гильзой подводят к стыковочной грани и подают голосовую команду системе управления на схватывание гильзы, далее в режиме реального времени по беспроводному соединению в систему управления от датчика пространственного положения гильзы культи верхней конечности поступают ее пространственные координаты относительно базовой системы координат, которые анализируют и формируют управляющие команды к линейным приводам, согласованно изменяют их длины и совмещают плоскость стыковочного схвата со стыковочной плоскостью гильзы культи, после этого линейные приводы отключают и уменьшают длины линейных приводов стыковочного схвата и производят схватывание гильзы культи верхней конечности упругими упорами с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы стыковочной грани отключают и приступают к эксплуатации, при которой используют все свободные схваты, при этом перед схватыванием предмета выбирают плоскость контакта с предметом, организуют согласованное движение культи верхней конечности и соответствующих линейных приводов и совмещают с выбранной плоскостью плоскость схвата, при этом плоскость контакта охватываемого предмета располагают внутри схвата, а плоскость контакта охватывающего предмета располагают снаружи вершин грани схвата и осуществляют согласованное изменение длин ее стержней и схватывают предмет с требуемыми усилиями, которое определяю по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, при этом перед схватыванием предмета голосовой командой называют характеристики предмета, а при голосовом управлении схватом называют его обозначение, далее согласованно двигают культей верхней конечности и изменяют длины стержней свободных граней и осуществляют требуемое манипулирование предметом, далее предмет устанавливают на выбранное место, пространственное положение которого относительно базовой системы координат определяют по показаниям датчиков пространственного положения культи и вершин октаэдрального модуля, а также датчиков относительного перемещения, и согласованно изменяют длины стержней грани схвата и предмет освобождают от схвата и приступают к дальнейшей эксплуатации адаптивного мобильного пространственного робота-манипулятора, после окончания эксплуатации пациент подает голосовую команду на освобождение гильзы культи от стыковочного схвата и подзарядку источника питания, при этом длины стержней стыковочной грани увеличивают, гильзу освобождают и соответствующие линейные приводы выключают, и устанавливают контакт одной из граней октаэдрального модуля с поверхностью перемещения, уменьшают длины ее стержней до минимального значения и соответствующие линейные приводы выключают, далее по показаниям датчиков пространственного положения вершин октаэдрального модуля в системе управления определяют их пространственные координаты относительно базовой системы координат, сравнивают с пространственными координатами устройства беспроводной зарядки источника питания, формируют маршрут следования, траекторию которого при необходимости разбивают на повороты и прямолинейные участки, и алгоритм управляющих команд на линейные приводы октаэдрального модуля, затем согласованно изменяют длины линейных приводов и организуют ползающее движение октаэдрального модуля по контактируемой поверхности до конечного пункта маршрута следования, при этом прямолинейный участок траектории прокладывают от вершины контактируемой с поверхностью грани, близлежащей к конечному пункту маршрута следования или точке поворота к следующему прямолинейному участку траектории, далее организуют поворот биссектрисы, проходящей через лежащую на траектории вершину, и совмещают ее с прямолинейным участком траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения, и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону лежащей на траектории и наиболее удаленной от нее вершины и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на близлежащую к траектории вершину, после этого выключают соответствующие линейные приводы и увеличивают длину стержня, соединяющего не лежащие на траектории вершины, при этом близлежащую к траектории вершину перемещают и поворачивают связанный с ним стержень относительно вершины, лежащей на траектории, на угол 30 градусов относительно траектории и соответствующий привод выключают, после этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения, и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону перемещенной вершины и вершины, лежащей на траектории, и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на третью вершину и выключают соответствующие линейные приводы, далее максимально уменьшают длину стержня, соединяющего вершины, не лежащие на траектории, при этом биссектрису, проходящую через лежащую на траектории вершину, совмещают с прямолинейным участком траектории и соответствующий привод выключают, затем организуют прямолинейное движение октаэдрального модуля вдоль траектории, при этом согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения, и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону не лежащих на траектории вершин и обеспечивают превышение давления от веса октаэдрального модуля на каждую из них по отношению к давлению от веса октаэдрального модуля на лежащую на траектории вершину, после этого выключают соответствующие линейные приводы и синхронно увеличивают длины стержней, связанных с вершиной, лежащей на траектории, и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов, и соответствующие приводы выключают и синхронно увеличивают длины стержней, связанных с вершиной, лежащей на траектории, и перемещают ее вдоль прямолинейного участка траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов, и соответствующие приводы выключают, после этого согласованно изменяют длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения, и смещают проекцию центра тяжести октаэдрального модуля на контактируемую поверхность в сторону вершины, лежащей на траектории, и обеспечивают превышение давления от веса октаэдрального модуля на нее по отношению к суммарному давлению от веса октаэдрального модуля на вершины, не лежащие на траектории, после этого выключают соответствующие линейные приводы и синхронно уменьшают длины стержней, связанных с вершиной, лежащей на траектории, и симметрично и прямолинейно перемещают не лежащие на траектории вершины относительно траектории на заданную величину, которую определяют по показаниям датчиков относительного перемещения линейных приводов, и соответствующие приводы выключают, после этого алгоритм прямолинейного движения октаэдрального модуля повторяют и обеспечивают его перемещение до конечного пункта маршрута или до точки поворота к следующему прямолинейному участку и алгоритм поворота и прямолинейного движения повторяют, затем все линейные приводы выключают, заряжают источник питания и включают режим ожидания команд, которые пациент передает системе управления через средства формирования волевых команд пациента.
3. Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора по п. 2, отличающийся тем, что для перемещения октаэдрального модуля по неровной поверхности организуют его перекатывающееся движение, при котором согласованно увеличивают длины стержней, кроме стержней грани, контактируемой с поверхностью перемещения, и смещают проекцию центра тяжести октаэдрального модуля за пределы линии, проходящей через точки контакта с поверхностью двух выбранных смежных вершин, и осуществляют плавный поворот октаэдрального модуля до контакта смежной грани с поверхностью, после этого длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее выбирают следующую ось поворота октаэдрального модуля и алгоритм перекатывающегося движения повторяют.
4. Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора по п. 2, отличающийся тем, что для перемещения октаэдрального модуля по неровной поверхности и недостаточным рабочим ходом линейных приводов организуют его перекатывающееся движение с использованием сил инерции, при котором длину стержней согласованно увеличивают с заданной величиной ускорения, и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на октаэдральный модуль действуют силы инерции, которые поворачивают его относительно оси между точками контакта с поверхностью выбранных вершин, после этого длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее выбирают следующую ось поворота октаэдрального модуля и алгоритм перекатывающегося движения с использованием сил инерции повторяют.
5. Способ обслуживания пациента посредством адаптивного мобильного пространственного робота-манипулятора по п. 2, отличающийся тем, что для преодоления препятствий на пути перемещения октаэдрального модуля организуют его прыгающее движение с использованием сил инерции, при котором перед прыжком вертикальные стержни ориентируют в сторону прыжка и их длину согласованно увеличивают с заданной величиной ускорения и выключают соответствующие линейные приводы в заданный момент времени, которые определяют с помощью датчиков относительного перемещения, относительной скорости, совмещенных датчиков пространственного положения и ускорений, при этом на октаэдральный модуль действуют силы инерции, которые отрывают его от поверхности и перемещают в заданном направлении, после окончания прыжка и преодоления препятствия длины стержней уменьшают до первоначального состояния и соответствующие приводы выключают, далее продолжают движение октаэдрального модуля по выбранному алгоритму.
| EP 1340478 B1, 10.10.2007 | |||
| Сребренная поверхность теплообмена | 1958 |
|
SU127620A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РЕАБИЛИТАЦИОННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И ДИАГНОСТИКИ ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2014 |
|
RU2564754C1 |
| US 9566174 B1, 14.02.2017 | |||
| US 9730813 B2, 15.08.2017. | |||

