Настоящее изобретение относится к неразрушающему контролю кольцевого уплотнителя, выступающего из поверхности барабана облопаченных дисков газотурбинного двигателя. В частности, изобретение относится к дефектоскопии методом вихревых токов кромок уплотнителей, проходящих по существу группами между дисками, образующими барабан.
В турбореактивном двигателе самолета турбомашина, например компрессор, имеет барабан облопаченных дисков, установленный для вращения вокруг своей главной оси, как это раскрыто, например, в публикации EP 1780538 или EP 1605259. Такой барабан, часто именуемый "каскад", несет на себе все лопатки ротора. Каждая ступень компрессора имеет кольцо подвижных лопаток, которые равномерно отстоят друг от друга по окружности диска. Собранные друг с другом диски образуют указанный барабан.
Между кольцами подвижных лопаток расположены кольца лопаток статора. Уплотнение между двумя последовательными ступенями достигается за счет взаимодействия между кольцом истираемого материала, которое установлено на стационарных лопатках, и уплотнителями, закрепленными на барабане. Уплотнители являются своего рода шероховатыми кольцевыми ребрами. Между двумя последовательными ступенями уплотнение обычно осуществляется с помощью множества параллельных уплотнителей (обычно от двух до четырех).
Для того чтобы ограничить износ уплотнителя с течением времени, на него плазменным напылением наносят прочный материал.
Такой материал, нанесенный плазменным напылением, подлежит неразрушающему контролю, чтобы идентифицировать наличие трещин любого типа. Чаще всего используют средства неразрушающего контроля, основанные на дефектоскопии методом вихревых токов. До настоящего времени применялся такой тип контроля, в котором используется датчик (высокочастотная катушка), конец которой перемещают вдоль кромки уплотнителя для контроля, при этом конец катушки находится в непосредственном контакте с кромкой уплотнителя.
При плазменном напылении возникает некоторая шероховатость уплотнителя, которая приводит к тому, что датчик быстро изнашивается.
Предпринимались попытки решить эту проблему, покрывая уплотнитель и конец датчика пленкой политетрафторэтилена, чтобы защитить датчик, получить высокую эффективность контроля методом вихревых токов и снизить трение, когда датчик движется относительно уплотнителя. Такое решение требует очень больших затрат времени на подготовку, в частности на нанесение пленки на каждый уплотнитель. Эти операции занимают несколько часов и влекут затраты средств на пленку политетрафторэтилена.
Настоящее изобретение позволяет решить все эти проблемы благодаря бесконтактному способу неразрушающего контроля с помощью датчика, и тем самым не подвергая его износу, и без использования политетрафторэтилена.
В частности, согласно настоящему изобретению предлагается устройство для контроля детали, образующей кольцевой уплотнитель уплотняющей структуры, проходящей по поверхности барабана облопаченных дисков, характеризующееся тем, что оно содержит каретку, имеющую по меньшей мере два отстоящих друг от друга направляющих колеса, выполненных с возможностью контактирования с по меньшей мере частью уплотнительной структуры, которая образует круговую направляющую, причем на каретке расположен по меньшей мере один датчик, установленный так, что, когда колеса находятся во взаимодействии с круговой направляющей, датчик обращен к кромке проверяемого уплотнителя и находится на заданном расстоянии от нее.
Использование уплотнителей в качестве репера для движения каретки позволяет обеспечить постоянное расстояние между датчиком и контролируемой деталью, что является необходимым условием качественного контроля, особенно если контроль осуществляется методом вихревых токов.
В вышеприведенном описании уплотняющая структура относится по меньшей мере к одному уплотнителю и чаще всего к группе уплотнителей, расположенных рядом друг с другом и разнесенных в осевом направлении по поверхности барабана между двумя соседними дисками. Круглую направляющую образует уплотняющая структура в целом. Другими словами, одно из вышеуказанных колес может иметь канавку V-образного сечения, в которой оно взаимодействует с вершиной уплотнителя, или может иметь выпуклый профиль, который вставлен между двумя соседними уплотнителями.
Настоящее изобретение и его преимущества будут более понятны из нижеследующего описания устройства согласно настоящему изобретению, приведенного лишь для примера и со ссылками на чертежи, на которых:
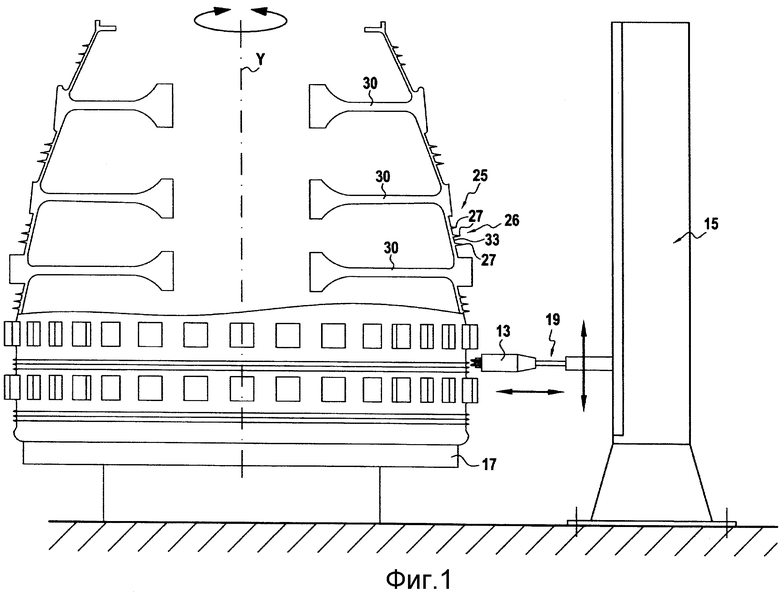
Фиг.1 - схематический общий вид устройства согласно настоящему изобретению с программируемым автоматическим позиционированием датчика;
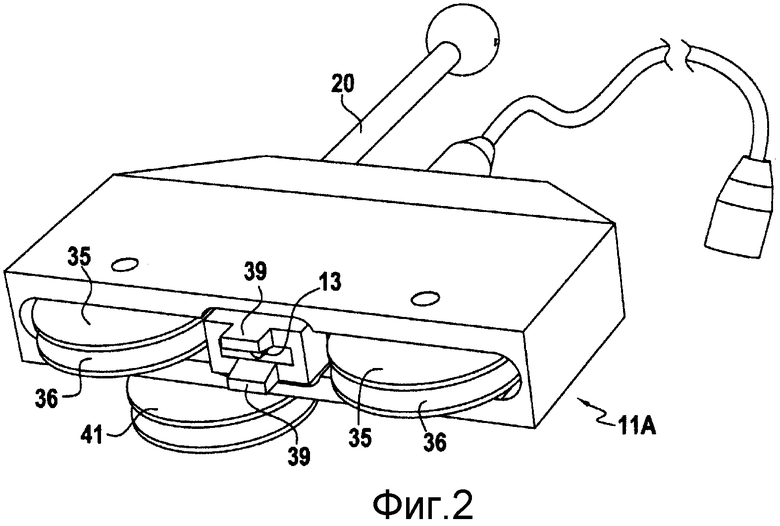
Фиг.2 - схематический вид каретки, несущей датчик для ручных исследований;
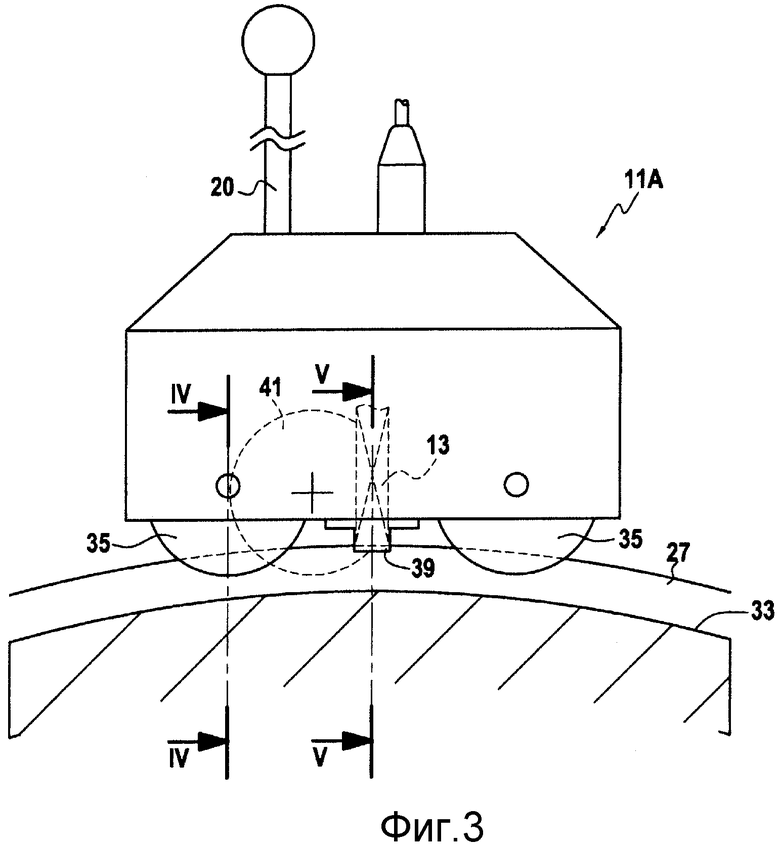
Фиг.3 - схема, иллюстрирующая проверку уплотнителя, используя каретку с фиг.2;
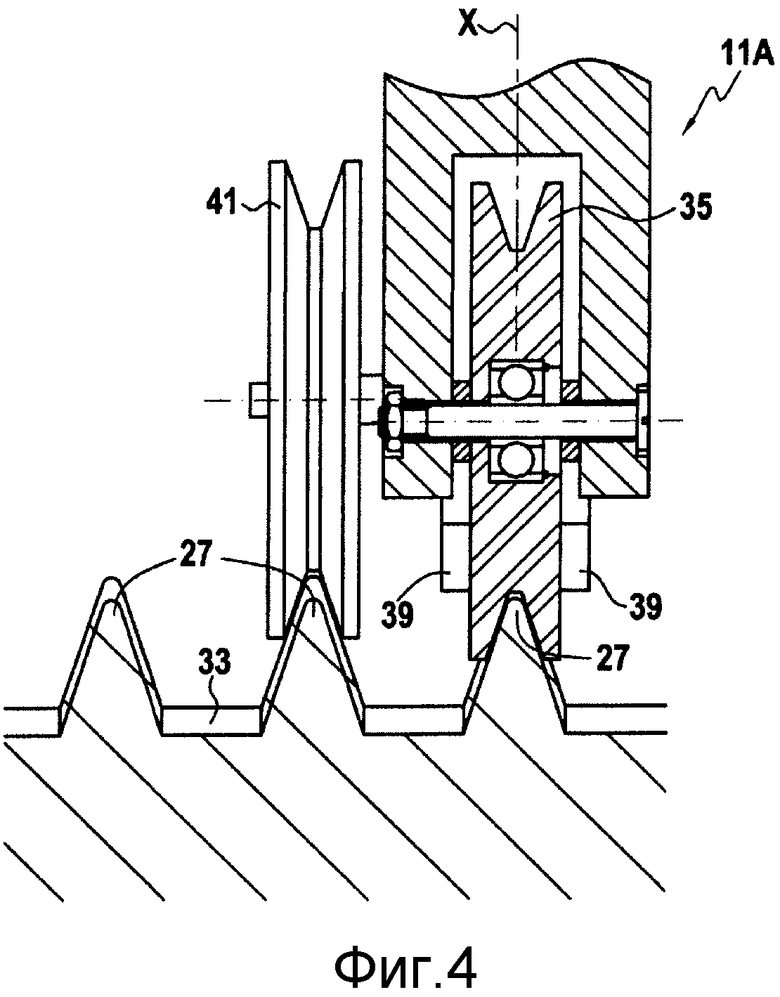
Фиг 4 - сечение по линии IV-IV с фиг.3;
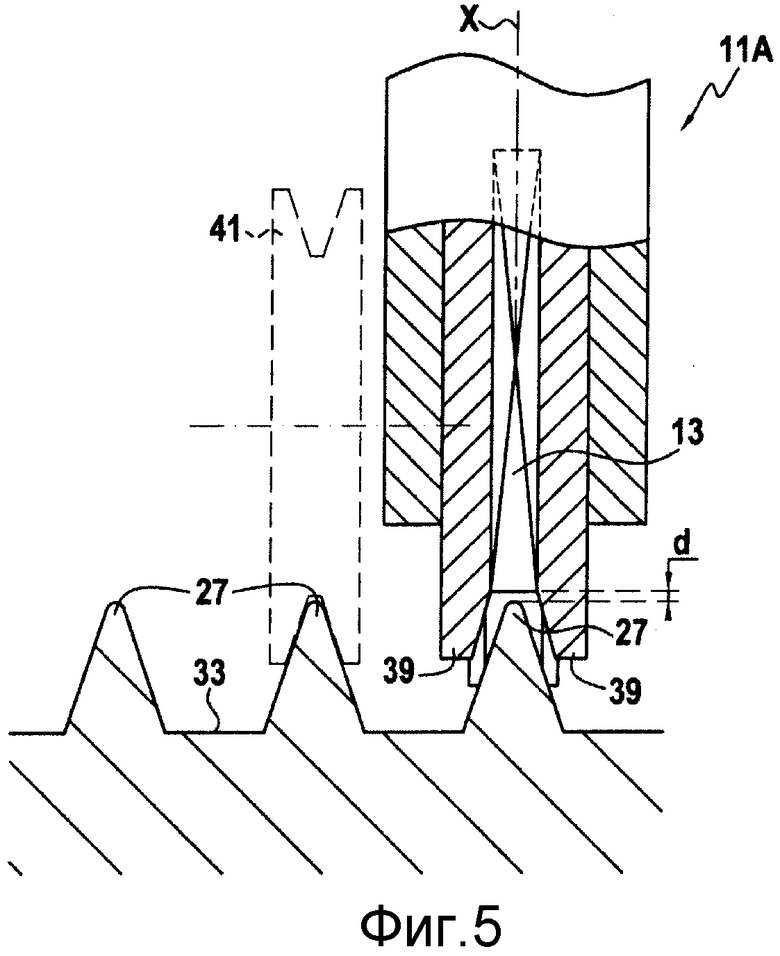
Фиг.5 - сечение по линии V-V с фиг.3; и
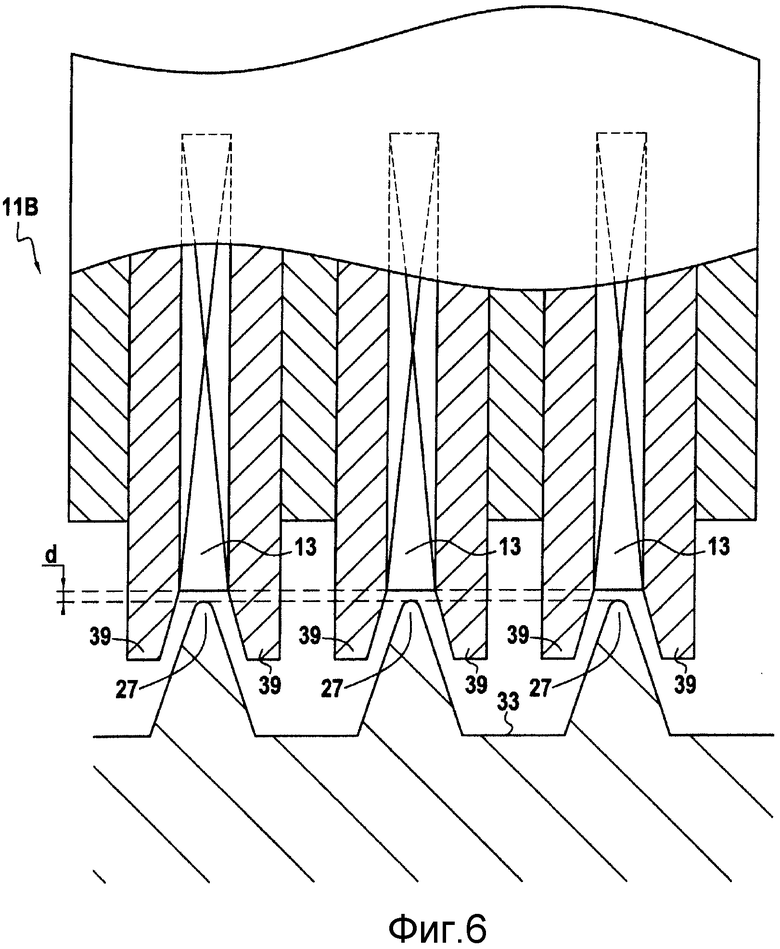
Фиг.6 - сечение, аналогичное фиг.5, иллюстрирующее вариант каретки, позволяющий одновременно осуществлять контроль всех уплотнителей данной уплотняющей структуры.
Устройство контроля, показанное на фиг.1, в автоматическом варианте, содержит каретку 11, на которой установлен по меньшей мере один вихретоковый датчик 13, робот 15, на котором установлена каретка, и поворотный стол 17, установленный для вращения вокруг оси Y вращения, которая в этом примере проходит вертикально. Робот 15 имеет телескопическую руку 19, и каретка 11 установлена на конце этой руки. Рука 19 расположена горизонтально и выполнена с возможностью перемещения в вертикальном направлении. Робот запрограммирован на регулировку положения каретки относительно стола так, чтобы контролировать различные уплотнители барабана 25, установленного на столе.
В показанном примере такой барабан 25 установлен на поворотный стол и позиционирован так, чтобы его главная ось симметрии совпадала с вертикальной осью Y вращения поворотного стола 17. Как показано на чертеже, барабан 25 облопаченных дисков, установленный на поворотный стол, состоит из соседних дисков 30, сваренных друг с другом. Между двумя последовательными дисками на барабане установлена уплотняющая структура 26, состоящая из множества уплотнителей 27. Каждый уплотнитель имеет форму шероховатого ребра. Робот 15, установленный рядом с поворотным столом, относится к типу, позволяющему подводить каретку к каждой группе уплотнителей 27 (именуемой "уплотняющая структура"). Одинаковая настройка высоты каретки позволяет контролировать все уплотнители 27 в данной уплотняющей структуре 26 либо последовательно, либо одновременно, если на каретке установлено множество датчиков.
Уплотнители 27 в данной уплотняющей структуре расположены рядом друг с другом и отстоят друг от друга на небольшое расстояние в осевом направлении так, что они образуют канавки 33 между собой. Поэтому уплотнители, как и канавки, могут служить реперами для направления каретки 11.
Каретка 11А, показанная на фиг.2-5, более конкретно адаптирована для ручного контроля. Поэтому стержень 19 заменен ручкой 20. Тем не менее, каретка 11А по существу аналогична каретке 11.
В частности, каретка 11А имеет по меньшей мере два разнесенных направляющих колеса 35, выполненных с возможностью контакта по меньшей мере с частью уплотняющей структуры 26, которая работает по существу как круглая направляющая. В этом примере два направляющих колеса 35 расположены в одной плоскости. В приведенном примере колеса имеют канавку 36 и предназначены для контакта с круговой кромкой уплотнителя. Датчик 13 образован катушкой, имеющей ось Х (ось ее витков), которая предназначена для удержания по существу перпендикулярно контролируемой детали. Датчик 13 и, в частности, один его конец находятся в таком положении, что, когда колеса 35 взаимодействуют с круговой направляющей, он обращен к кромке проверяемого уплотнителя 27. В этом примере проверяемым уплотнителем является уплотнитель, с которым взаимодействуют колеса 35. Ось Х датчика и дно канавок на колесах 35, таким образом, находятся по существу в одной плоскости. Датчик 13 расположен между этими двумя колесами. На фиг.4 показано колесо 35, взаимодействующее с уплотнителем 27, который его направляет. На фиг.5 показано положение датчика 13 (катушки) относительно кромки проверяемого уплотнителя 27. Когда колеса 35 взаимодействуют с уплотнителем 27, видно, что конец датчика, ближайший к уплотнителю, не контактирует с ним, а удерживается на небольшом заданном расстоянии d от кромки этого проверяемого уплотнителя. При движении каретки 11А по уплотнителю это расстояние остается постоянным, и этот признак является одним из условий, необходимых для качественной проверки. Кроме того, следует отметить, что каретка содержит боковые ножки 39, отходящие по обе стороны датчика и обращенные к проверяемому уплотнителю. Боковые ножки полезны при ручной проверке, то есть когда не используется робот. Оператору достаточно установить колеса на проверяемый уплотнитель и переместить каретку вокруг барабана. В этом случае боковые ножки 39 позволяют оператору выдерживать ориентацию датчика относительно уплотнителя.
Дополнительно, каретка 11А содержит по меньшей мере одно дополнительное направляющее колесо 41, которое расположено в плоскости, параллельной плоскости, в которой лежат остальные два колеса. Такое дополнительное направляющее колесо предназначено для контакта с круговой направляющей, например с соседним уплотнителем 27 (или канавкой 33, определенной между уплотнителями). Такое дополнительное направляющее колесо также способствует стабилизации ориентации датчика относительно проверяемого уплотнителя.
В автоматическом варианте по фиг.1 боковые ножки 39 и дополнительное колесо 41 не являются обязательными.
В варианте по фиг.6 каретка 11В содержит множество датчиков 13, отстоящих друг от друга так, чтобы каждый из них был обращен к кромке соответствующего уплотнителя 27 единой уплотнительной структуры и находился на заданном расстоянии d от нее. Это позволяет одновременно осуществлять контроль всех уплотнителей данной группы.
Например, в автоматическом варианте по фиг.1 робот запрограммирован на подведение каретки 11В на высоту, соответствующую положению группы уплотнителей, и, если в каретке имеется множество датчиков 13, которые соответствуют количеству уплотнителей 27 в этой группе, и датчики разнесены друг от друга на такое же расстояние, что и уплотнители, тогда все уплотнители данной группы (или данной уплотнительной структуры) можно проверить одновременно за один оборот стола 17.
В зависимости от ступени, в которой они расположены, уплотнители могут быть разнесены на разные расстояния. Можно создать каретку с датчиками, разнесенными на разное расстояние. В одном из вариантов каретка может содержать средство для регулирования расстояния между датчиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА И СПОСОБ ТЕРМООТДЕЛКИ ТРУБЧАТЫХ ТРИКОТАЖНЫХ ИЗДЕЛИЙ | 2016 |
|
RU2709427C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАТОЧНОЙ МАШИНЫ И ШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2162782C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПОДЛИННОСТИ ЦЕННЫХ ДОКУМЕНТОВ | 2005 |
|
RU2357291C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ИЛИ МАГНИТНОЙ ПЕРЕДАЧИ УСИЛИЯ | 2004 |
|
RU2350808C2 |
| КОМПРЕССОР СО ВСТРОЕННЫМИ ДВИГАТЕЛЯМИ И РАБОЧИМИ КОЛЕСАМИ, ОБЪЕДИНЕННЫМИ С РОТОРАМИ ДВИГАТЕЛЕЙ | 2014 |
|
RU2669122C1 |
| УПЛОТНЕНИЕ СТЫКОВ МЕЖДУ ВЕНТИЛЯЦИОННЫМИ ВОЗДУХОВОДАМИ И ФИТИНГАМИ | 2013 |
|
RU2652956C2 |
| Строительный 3D принтер | 2020 |
|
RU2753324C1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЫПОЛНЕННОГО В ВИДЕ ЕДИНОЙ ДЕТАЛИ ОБЛОПАЧЕННОГО ДИСКА, А ТАКЖЕ ТЕСТОВЫЙ ОБРАЗЕЦ (ВАРИАНТЫ) | 2006 |
|
RU2397329C2 |
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |
Изобретение относится к устройству для контроля кольцевого уплотнителя, проходящего по поверхности барабана облопаченных дисков ротора. Устройство содержит каретку, имеющую по меньшей мере два направляющих колеса и несущую датчик, в рабочем положении обращенный к кромке проверяемого уплотнителя и расположенный на заданном расстоянии от нее. Технический результат изобретения - повышение надежности контроля. 8 з.п. ф-лы, 6 ил.
1. Устройство для контроля детали, образующей кольцевой уплотнитель (27) уплотняющей структуры (26), проходящей по поверхности барабана облопаченных дисков, отличающееся тем, что оно содержит каретку (11, 11А, 11В), имеющую по меньшей мере два отстоящих друг от друга направляющих колеса (36), выполненных с возможностью контактирования по меньшей мере с частью уплотнительной структуры (26), которая образует круговую направляющую, причем на каретке расположен по меньшей мере один датчик (13), установленный так, что, когда колеса находятся во взаимодействии с круговой направляющей, датчик обращен к кромке проверяемого уплотнителя и находится на заданном расстоянии (d) от нее.
2. Устройство по п.1, отличающееся тем, что колеса (36) имеют канавку, причем ось датчика (13) и дно канавок колес расположены по существу копланарно, при этом датчик расположен между двумя колесами.
3. Устройство по п.1, отличающееся тем, что каретка имеет боковые ножки (39), отходящие с каждой стороны конца датчика, обращенного к уплотнителю для проверки.
4. Устройство по п.2 или 3, отличающееся тем, что каретка содержит по меньшей мере одно дополнительное направляющее колесо (41), расположенное в плоскости, параллельной плоскости двух других колес, и выполненное с возможностью контакта с круговой направляющей для стабилизации ориентации датчика (13) относительно проверяемого уплотнителя.
5. Устройство по п.1, отличающееся тем, что каретка (11В) имеет множество датчиков (13), отстоящих друг от друга так, что каждый из них обращен к соответствующей кромке проверяемого уплотнителя и отстоит от нее на заданное расстояние.
6. Устройство по п.5, отличающееся тем, что каретка содержит средство для регулировки расстояния между датчиками.
7. Устройство по п.1, отличающееся тем, что оно дополнительно содержит поворотный стол (17) для вращения вокруг оси вращения, выполненный с возможностью установки на нем барабана, при этом барабан установлен так, что его главная ось симметрии совпадает с осью (Y) вращения поворотного стола.
8. Устройство по п.7, отличающееся тем, что оно также содержит робот (15), имеющий руку (19), причем каретка установлена на конце руки, при этом робот запрограммирован на регулировку положения каретки относительно поворотного стола для контроля различных уплотнителей барабана.
9. Устройство по п.1, отличающееся тем, что датчик или каждый датчик является вихретоковым датчиком.
| Способ получения @ - @ -фенилтиоксилозидов | 1989 |
|
SU1780538A3 |
| РОТОР МНОГОСТУПЕНЧАТОГО ОСЕВОГО КОМПРЕССОРА | 1991 |
|
RU2033566C1 |
| Устройство для контроля родовой деятельности | 1988 |
|
SU1605259A1 |
| WO2006101586A,28.09.2006 | |||
| УПЛОТНИТЕЛЬНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ПАРОВОЙ ТУРБИНЫ ДЛЯ ПРОВОДКИ ИМЕЮЩЕГО ОСЬ ВАЛА ЧЕРЕЗ НЕПОДВИЖНЫЙ КОРПУС И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 1995 |
|
RU2117769C1 |

