Изобретение относится к хирургии, конкретно к инструментам для криовоздействия на ткани, и может применяться при эндоскопических операциях на внутренних органах.
Криохирургия является эффективным малоинвазивным хирургическим методом, локализующим деструктивное воздействие в контролируемой области. Эволюционно живые организмы не выработали адекватной нейрофизиологической реакции на глубокое переохлаждение. В связи с этим криовоздействие обладает такими преимуществами, как безболезненность, отсутствие кровотечений, быстрое заживление. Указанные преимущества особенно ярко проявляются при эндоскопических операциях, когда область воздействия после операции становится недоступна.
Известен ряд устройств для осуществления криовоздействия на наружные и внутренние органы. К ним относятся пассивные с монолитными предварительно охлаждаемыми сердечниками, активные с поступлением хладоагента из резервуара, пористые, поддерживающие температуру вплоть до выкипания хладоагента.
Известен, например, криоаппликатор пассивного типа «КриоСтик» (http://www.55355.ru/133/000_004.htm), содержащий рукоятку, сменный металлический наконечник и соединяющий их металлический штыревой держатель. Время непрерывной работы до 2 минут. Недостаток пассивного криоаппликатора с монолитным сердечником - малый ресурс хладоемкости, вследствие чего аппликатор требует многократного повторного охлаждения. Это особенно неприемлемо при внутриполостном применении.
Известен также эндоскопический криоаппликатор «Криотон-3» (http://www.medan.com.ua/cryoton_3.htm), содержащий резервуар с жидким азотом, сменный металлический наконечник и соединяющий их полый металлический штыревой держатель, обеспечивающий подачу жидкого азота к наконечнику. Время непрерывной работы до 7 минут.
Недостатки активных аппликаторов: громоздкость, интенсивное испарение хладоагента, образующего туман (емкость резервуара 0,5 л, что соответствует выделению 0,32 куб.м холодных паров), а также жесткость конструкции, ограничивающая возможность позиционирования инструмента относительно объекта воздействия. Последний недостаток особенно выражен при работе внутри полости.
Указанные недостатки ограничивают применение активных криоаппликаторов при эндоскопических операциях. Наиболее подходящими для этой цели являются пористые криоаппликаторы, которые обладают повышенным ресурсом хладоемкости за счет скрытой теплоты испарения хладоагента, не нуждаются вследствие этого в постоянной подпитке из резервуара и выделяют небольшое количество холодных паров.
Известен эндоскопический криоаппликатор (см. патент РФ №1616628 «Криогенный аппликатор», см. также: Медицинские материалы и имплантаты с памятью формы / Гюнтер В.Э., Дамбаев Г.Ц. и др., Изд-во Томского университета, Томск. 1998, с. 405), содержащий рукоятку, цилиндрический сердечник, выполненный из пористого никелида титана, и соединяющий их держатель, выполненный из никелида титана. По совокупности признаков данный криоаппликатор наиболее близок к заявляемому, выбран в качестве прототипа. Сердечник криоаппликатора представляет собой объем, образованный сообщающимися порами. Хладоагент удерживается в порах силами поверхностного натяжения. Продолжительность работы достигает 5 минут, что сравнимо с продолжительностью работы вышеприведенного криоаппликатора «Криотон-3». Держатель из никелида титана в силу свойственной ему сверхэластичности позволяет придавать ему произвольный изгиб соответственно условиям подведения к области воздействия, что несколько расширяет возможности позиционирования при внутриполостных операциях.
Тем не менее прототип также обладает недостатком, ограничивающим его применение при эндоскопических операциях, а именно: отсутствием возможности изменения формы держателя внутри полости, что сужает возможность позиционирования относительно объекта воздействия.
Технический результат изобретения - расширение возможности позиционирования аппликатора относительно объекта воздействия при эндоскопических операциях за счет обеспечения возможности интраоперационного изменения формы держателя.
Заявленный результат достигается тем, что в эндоскопическом криоаппликаторе, содержащем рукоятку, цилиндрический сердечник, выполненный из пористого никелида титана, и соединяющий их штыревой держатель, выполненный из никелида титана, отличие состоит в том, что он снабжен жесткой муфтой из полимерного материала, охватывающей штыревой держатель с возможностью продольного скольжения, а участок штыревого держателя, примыкающий к пористому сердечнику, выполнен утонченным и дугообразно изогнут под углом в пределах от 45 до 90°.
Криоаппликатор отличается также тем, что штыревой держатель выполнен из никелида титана с температурой фазового перехода ниже 77 K.
Криоаппликатор отличается также тем, что длина утонченного участка штыревого держателя выбрана в пределах от 1 до 1,5 длины цилиндрического сердечника.
Криоаппликатор отличается также тем, что длина муфты, охватывающей штыревой держатель, выбрана в пределах 150-180 мм, а длина штыревого держателя выбрана превышающей длину муфты на 1,5-2 длины изогнутого участка.
Связь между отличительными признаками и заявленным техническим результатом подтверждается следующим.
1. Дугообразный изгиб участка штыревого держателя, примыкающего к пористому сердечнику, обеспечивает при внутриполостных операциях доступ к удаленным областям выпуклых органов, при этом изгиб в пределах от 45 до 90° обеспечивает разнообразие позиций в пределах узкого операционного пространства.
2. Жесткая муфта из полимерного материала, охватывающая штыревой держатель с возможностью продольного скольжения, обеспечивает изменение угла изгиба держателя в зависимости от положения муфты относительно сердечника. При муфте, надвинутой вплотную к сердечнику, дугообразный участок держателя, охваченный муфтой, выпрямляется, ось сердечника ориентируется вдоль оси муфты. По мере удаления муфты от сердечника длина участка, свободного от распрямляющего действия муфты, увеличивается, угол отклонения оси сердечника от оси муфты также увеличивается. При полностью освобожденном дугообразном участке штыревого держателя угол отклонения оси сердечника достигает исходно заданного угла. Таким образом, в операционной зоне при выполнении эндоскопической операции обеспечивается возможность дистанционно регулировать угол отклонения оси сердечника криоаппликатора. Дополнительно, поворотом криоаппликатора вокруг оси достигаются разнообразные направления, в которых может быть ориентирован пористый сердечник.
3. Выполнение муфты из полимерного материала, обладающего низкой теплопроводностью и теплоемкостью, обеспечивает удобство манипуляций с муфтой в условиях контакта ее с жидким азотом.
4. Признак «изгиб участка штыревого держателя» в заявляемом изобретении реализует положительный эффект только в совокупности с признаком наличия жесткой муфты и возможностью выпрямления указанного участка. Без этого изначально изогнутый инструмент не может быть проведен в эндоскопический порт (троакар), представляющий собой протяженную трубку.
5. Утончение штыревого держателя на дугообразном участке обеспечивает преимущественный упругий изгиб указанного участка без вовлечения остальной части держателя, служащей для однозначной ориентации криоаппликатора. Отсутствие изгиба проксимальной части держателя снижает вероятность заклинивания его в канале муфты.
6. Выполнение штыревого держателя из никелида титана с температурой фазового перехода ниже 77 K обеспечивает сохранение упругих свойств изогнутой части штыревого держателя и работоспособность устройства при охлаждении в жидком азоте, преимущественно используемом в криохирургии.
7. Выбор длины изогнутого участка в пределах 1-1,5 длины пористого сердечника обоснован удобством применения в узком операционном пространстве и определен эмпирически.
8. Выбор длины муфты в пределах 150-180 мм обоснован типичными продольными размерами эндоскопических портов (троакаров), как правило, от 100 до 120 мм. Дистальный конец муфты должен как минимум достигать дистального среза троакара, чтобы изогнутый участок штыревого держателя располагался в операционной полости, а проксимальный конец муфты должен выступать наружу с возможностью удержания и манипулирования.
9. Выбор длины штыревого держателя превышающим длину муфты на 1,5-2 длины изогнутого участка обеспечивает необходимый диапазон продольного перемещения муфты между сердечником и рукояткой, при этом угловое отклонение оси сердечника меняется от нуля до максимума. Для удобства манипуляций резервируется эмпирически выбранный запас длины прямолинейной части держателя, находящейся вне муфты в операционной зоне.
Таким образом, совокупность заявленных признаков обеспечивает разнообразное позиционирование сердечника эндоскопического криоаппликатора в операционной зоне. Передвижением жесткой муфты вдоль штыревого держателя и поворотом рукоятки сердечник может быть установлен в любом из направлений, лежащих в коническом сегменте с раскрывом от ±45° до ±90° в зависимости от исходно заданного изгиба штыревого держателя.
Изобретение поясняется фиг.1-3.
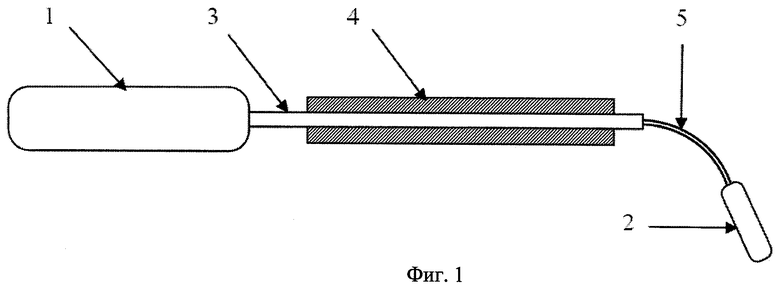
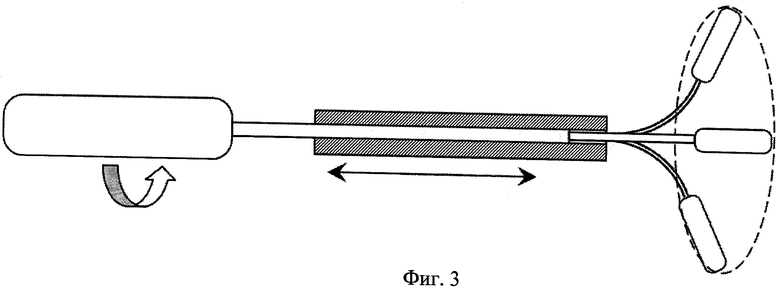
На фиг.1 изображен эндоскопический аппликатор в состоянии с максимальным отклонением сердечника. На фиг.2 изображен эндоскопический аппликатор, подготовленный к введению в операционную полость через троакар. На фиг.3 изображен эндоскопический криоаппликатор с указанием зоны доступных положений сердечника, устанавливаемых интраоперационно.
Эндоскопический криоаппликатор (фиг.1) содержит рукоятку 1, цилиндрический сердечник 2, выполненный из пористого никелида титана, и соединяющий их штыревой держатель 3, выполненный из никелида титана. Отличие состоит в том, что он снабжен жесткой муфтой 4 из полимерного материала, охватывающей штыревой держатель 3 с возможностью продольного скольжения. Участок 5 штыревого держателя, примыкающий к пористому сердечнику 2, выполнен утонченным и дугообразно изогнут под углом от 45 до 90°. Штыревой держатель 3 выполнен из никелида титана с температурой фазового перехода ниже 77 K. Длина утонченного участка 5 штыревого держателя 3 составляет от 1 до 1,5 длины пористого сердечника 2, длина жесткой муфты 4 составляет от 150 до 180 мм, а длина штыревого держателя 3 превышает длину жесткой муфты 4 на 1,5-2 длины изогнутого участка 5.
Эндоскопический аппликатор применяют следующим образом. Удерживая устройство за рукоятку 1, погружают пористый сердечник 2 в жидкий азот и выдерживают до прекращения интенсивного кипения, что свидетельствует о насыщении его пор хладоагентом. Жесткую муфту 4 сдвигают вплотную к сердечнику 2, в результате чего изогнутый участок 5 штыревого держателя 3 выпрямляется и сердечник 2 ориентируется соосно с муфтой 4 и основной частью держателя 3 (фиг.2). В этом положении вводят сердечник и муфту в эндоскопический порт (троакар). Как правило, эндоскопические операции производятся с использованием средств видеонаблюдения. Под визуальным контролем сдвигом муфты 4 в направлении рукоятки 1 и вращением рукоятки 1 вокруг оси добиваются нужного положения сердечника 2 относительно объекта криовоздействия и приводят его в контакт с объектом. Совокупность заявляемых признаков обеспечивает возможность итраоперационно измененять направление подведения сердечника к замораживаемой поверхности в коническом сегменте с раскрывом от 90 до 180° (фиг.3), в том числе в обход выступающего препятствия, например выпуклости внутреннего органа. Жесткая муфта 4, кроме функции регулировки угла отклонения сердечника 2 от оси, обеспечивает функцию клапана, создавая в канале троакара сопротивление утечке газа, поддерживающего внутриполостное давление (пневмоперитонеум).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СТЕНОЗА ТРАХЕИ | 2001 |
|
RU2221515C2 |
| КРИОХИРУРГИЧЕСКИЙ ЭПИКАРДИАЛЬНЫЙ АППЛИКАТОР | 2012 |
|
RU2514726C1 |
| ПОРИСТЫЙ СПЛАВ НА ОСНОВЕ НИКЕЛИДА ТИТАНА И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2006 |
|
RU2320741C2 |
| КЛИПСА ДЛЯ ОБТУРАЦИИ ПОЛЫХ ПРОТЯЖЕННЫХ ОРГАНОВ | 2003 |
|
RU2240735C1 |
| СПОСОБ ЛЕЧЕНИЯ БАЗАЛЬНО-КЛЕТОЧНОГО РАКА | 2009 |
|
RU2402990C1 |
| УСТРОЙСТВО ДЛЯ ГЕМОСТАЗА ПРИ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЯХ НА ПОЧКАХ | 2006 |
|
RU2318457C1 |
| СПОСОБ ЛЕЧЕНИЯ СОСУДИСТОЙ НЕДОСТАТОЧНОСТИ НИЖНИХ КОНЕЧНОСТЕЙ | 2004 |
|
RU2289363C2 |
| СПОСОБ ЛЕЧЕНИЯ ШЕЙНОГО ОСТЕОХОНДРОЗА | 2007 |
|
RU2333736C1 |
| КОСТНЫЙ ИМПЛАНТАТ | 1998 |
|
RU2157151C2 |
| ИСКУССТВЕННЫЙ СФИНКТЕР | 2002 |
|
RU2236197C2 |

Изобретение относится к медицинской технике, а именно к инструментам для криовоздействия на ткани, и может применяться при эндоскопических операциях на внутренних органах. Криоаппликатор содержит рукоятку, цилиндрический сердечник, выполненный из пористого никелида титана, и соединяющий их штыревой держатель, выполненный из никелида титана. Штыревой держатель снабжен скользящей по нему жесткой муфтой из полимерного материала. Участок штыревого держателя, примыкающий к пористому сердечнику, выполнен утонченным и дугообразно изогнут под углом в пределах от 45 до 90°. Использование изобретения позволит расширить возможности позиционирования аппликатора относительно объекта воздействия при эндоскопических операциях за счет обеспечения возможности интраоперационного изменения формы держателя. 3 з.п. ф-лы, 3 ил.
1. Эндоскопический криоаппликатор, содержащий рукоятку, цилиндрический сердечник, выполненный из пористого никелида титана, и соединяющий их штыревой держатель, выполненный из никелида титана, отличающийся тем, что он снабжен жесткой муфтой из полимерного материала, охватывающей штыревой держатель с возможностью продольного скольжения, при этом участок штыревого держателя, примыкающий к пористому сердечнику, выполнен утонченным и дугообразно изогнут под углом в пределах от 45 до 90°.
2. Эндоскопический криоаппликатор по п.1, отличающийся тем, что штыревой держатель выполнен из никелида титана с температурой фазового перехода ниже 77°K.
3. Эндоскопический криоаппликатор по п.1, отличающийся тем, что длина утонченного участка штыревого держателя выбрана в пределах от 1 до 1,5 длины цилиндрического сердечника.
4. Эндоскопический криоаппликатор по п.1, отличающийся тем, что длина муфты, охватывающей штыревой держатель, выбрана в пределах 150-180 мм, а длина штыревого держателя выбрана превышающей длину муфты на 1,5-2 длины изогнутого участка.
| Универсальный ультразвуковой криодеструктор | 1989 |
|
SU1683704A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБКИМ ЭНДОСКОПОМ | 1972 |
|
SU418173A1 |
| SU 1616628 A1, 30.12.1990 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| DE 102005050344 A1, 03.05.2007. | |||

