Область техники, к которой относится изобретение
Настоящее изобретение относится к измерительному инструменту для индикации нагрузки в конусной дробилке, которая содержит дробящий конус, на котором установлена внутренняя броня, и раму, на которой установлена внешняя броня, при этом внешняя броня образует вместе с внутренней броней рабочий зазор, приводное устройство, выполненное с возможность обеспечения вращательного маятникового движения дробящего конуса для дробления материала, который введен в рабочий зазор.
Настоящее изобретение дополнительно относится к способу индикации функционирования конусной дробилки вышеописанного типа.
Настоящее изобретение также относится к конусной дробилке вышеописанного типа.
Уровень техники
Конусная дробилка имеет дробящий конус, на котором установлена по существу коническая внутренняя броня. Внешняя броня установлена в раме дробилки таким образом, что она окружает внутреннюю броню, при этом рабочий зазор образован между внутренней броней и внешней броней. Во время дробления дробящий конус и, тем самым, внутренняя броня совершают конусное маятниковое движение, что вызывает дробление материала, например камня, который введен в рабочий зазор, до малого размера.
Часто является необходимым подавать в конусную дробилку настолько много материала, насколько это возможно без ее перегрузки. В WO 2005/007293 описан способ регулирования конусной дробилки для получения высокой нагрузки без перегрузки дробилки. В способе, описанном в WO 2005/007293, измерены мгновенные нагрузки на дробилку и вычислена средняя величина, которая представляет собой наивысшую мгновенную нагрузку. Эта средняя величина, которая может быть названа как среднее пиковое давление, используется для регулирования дробилки, чтобы обеспечить подачу большого количества материала без перегрузки дробилки. Индикаторное устройство указывает, является ли работа дробилки эффективной или нет, посредством сравнения среднего пикового давления и среднего давления. Однако было бы желательно найти способ дополнительного увеличения количества материала, которое может быть подано в дробилку без ее перегрузки.
Раскрытие изобретения
Одной целью данного изобретения является создание измерительного инструмента, с помощью которого можно получить указание о том, работает ли дробилка эффективно или нет.
Эта цель достигается посредством измерительного инструмента для индикации нагрузки в конусной дробилке вышеописанного типа, при этом измерительный инструмент отличается тем, что он содержит
первое измерительное устройство для измерения, по меньшей мере, одной мгновенной нагрузки на дробилку,
второе измерительное устройство для измерения положения вращения внутренней брони относительно внешней брони и
корреляционное устройство, выполненное с возможностью согласования, по меньшей мере, одной мгновенной нагрузки на дробилку с соответствующим измеренным положением вращения внутренней брони относительно внешней брони.
Одним преимуществом этого измерительного инструмента является возможность индикации того, что часть дробилки не работает эффективно. Измерительный инструмент может, например, показывать, что часть дробилки может выдерживать более высокую нагрузку, что позволило бы увеличить количество материала для дробления. Измерительный инструмент может также показывать, что подача материала на дробилку может нуждаться в регулировании.
Согласно одному варианту осуществления измерительный инструмент дополнительно содержит индикаторную шкалу, такую как экран дисплея, выполненный с возможностью оптического отображения измеренного положения вращения и согласованной с ним мгновенной нагрузки. Одно преимущество этого варианта осуществления заключается в том, что оператор, который управляет конусной дробилкой, может получить четкое указание о том, эффективна ли работа дробилки или нет. В последнем случае оператор может получить информацию о том, где в дробилке следует предпринять меры. Такие меры могут включать изменение положения устройства подачи, например ленточного конвейера или вибрационного устройства подачи, или воздействие на то, как материал подается в устройство подачи.
Согласно одному варианту осуществления измерительный инструмент содержит индикаторную шкалу, выполненную с возможностью оптического отображения точки вдоль внутренней периферии внешней брони, в которой измеренная мгновенная нагрузка является наивысшей. Одним преимуществом этого варианта осуществления является то, что оно позволяет оператору легко опознавать, где необходимо сначала принять меры.
Согласно одному варианту осуществления измерительный инструмент содержит индикаторную шкалу, выполненную с возможностью оптического отображения точки вдоль внутренней периферии внешней брони, в которой измеренная мгновенная нагрузка является наивысшей, и величины измеренной мгновенной нагрузки в этой точке. Одним преимуществом этого варианта осуществления является то, что оно позволяет оператору опознавать, где нагрузка является наивысшей и одновременно ее величину, и, таким образом, определить, нужно ли предпринять меры или нет и куда направить эти меры.
Согласно одному предпочтительному варианту осуществления индикаторная шкала содержит вектор, который исходит из начала координат и направлен к точке вдоль внутренней периферии внешней брони, в которой синхронный компонент давления измеренной нагрузки является наивысшим, при этом длина вектора соответствует амплитуде синхронного компонента давления. Преимущество вектора заключается в том, что он обеспечивает ясное указание о том, где в дробилке нагрузка является наивысшей и насколько велик синхронный компонент нагрузки.
Согласно одному предпочтительному варианту осуществления индикаторная шкала содержит полярный график, который исходит из начала координат и который показывает измеренную нагрузку в, по меньшей мере, трех точках вдоль внутренней периферии внешней брони. Преимущество полярного графика заключается в том, что он способен показать не только, где нагрузка на дробилку является наивысшей, но также где нагрузка на дробилку является низкой и, следовательно, может быть увеличена для получения более эффективной операции дробления.
Дополнительной целью настоящего изобретения является создание способа индикации функционирования конусной дробилки, при этом способ облегчает установку дробилки для получения более эффективной операции дробления.
Эта цель достигается посредством способа индикации функционирования конусной дробилки вышеописанного типа, при этом способ отличается тем, что
измеряют, по меньшей мере, одну мгновенную нагрузку на дробилку,
измеряют положение вращения внутренней брони относительно внешней брони и,
по меньшей мере, одну мгновенную нагрузку согласуют с соответствующим положением вращения внутренней брони относительно внешней брони.
Одним преимуществом этого способа является то, что получено указание о том, где в дробилке имеет место измеренная нагрузка. Это позволяет подвергнуть анализу отличия в процессе дробления в различных частях рабочего зазора и в результате этого анализа предпринять меры для получения более равномерного процесса дробления в различных частях рабочего зазора.
Согласно одному предпочтительному варианту осуществления наивысшую измеренную нагрузку вдоль внутренней периферии внешней брони определяют и согласуют с соответствующим положением вращения внутренней брони относительно внешней брони. Одним преимуществом этого способа является то, что это позволяет легко опознавать часть рабочего зазора, в котором наиболее необходимо предпринять меры.
Дополнительной целью настоящего изобретения является создание конусной дробилки, которая может быть более легко отрегулирована для обеспечения эффективной работы.
Эта цель достигается посредством конусной дробилки вышеописанного типа, отличающейся тем, что она содержит
первое измерительное устройство для измерения, по меньшей мере, одной мгновенной нагрузки на дробилку,
второе измерительное устройство для измерения положения вращения внутренней брони относительно внешней брони и
корреляционное устройство, выполненное с возможностью согласования, по меньшей мере, одной мгновенной нагрузки на дробилку с соответствующим измеренным положением вращения внутренней брони относительно внешней брони.
Одним преимуществом этой конусной дробилки является то, что может быть получена информация о том, где вдоль внутренней периферии внешней брони эффективность дробления может быть улучшена, например, подачей большего количества материала, меньшего количества материала или материала различного состава.
Дополнительные преимущества и признаки данного изобретения будут очевидны из приведенного ниже описания и приложенной формулы изобретения.
Краткое описание чертежей
Данное изобретение будет описано ниже посредством вариантов его осуществления и со ссылкой на прилагаемые чертежи.
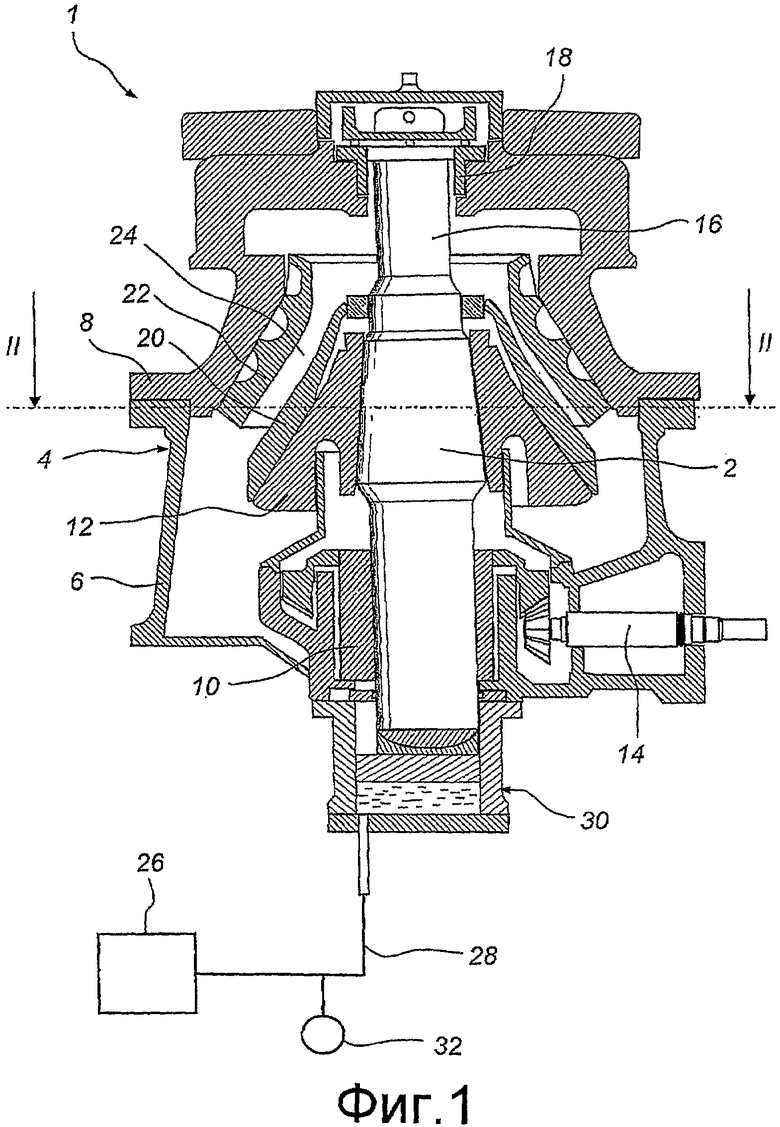
Фиг.1 представляет собой вид в вертикальном разрезе конусной дробилки.
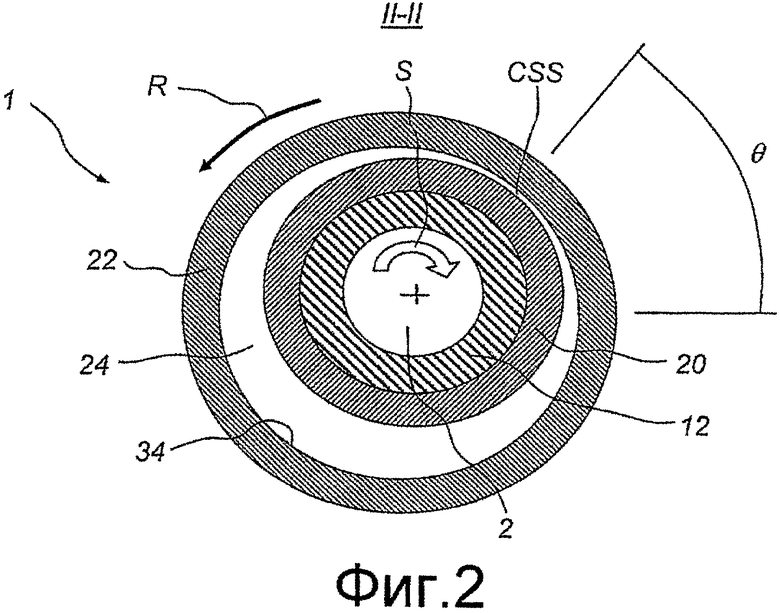
Фиг.2 представляет собой вид в горизонтальном разрезе конусной дробилки, показанной на фиг.1, по линии II-II.
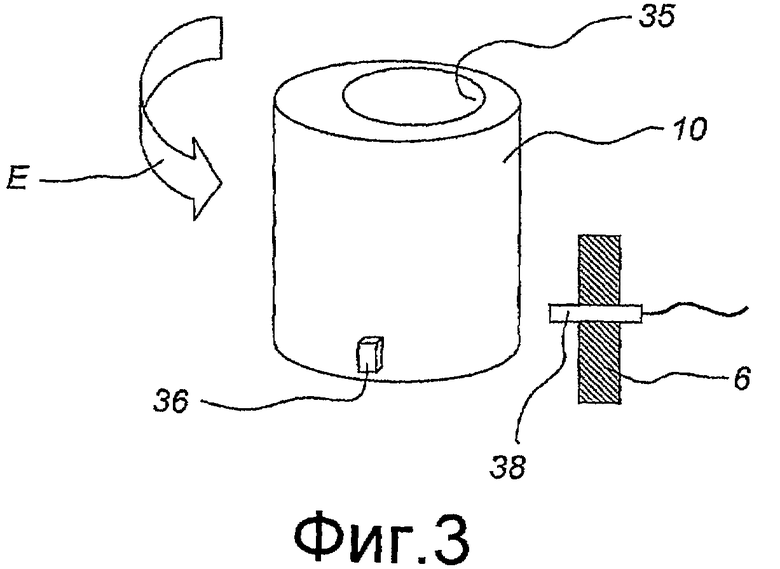
Фиг.3 представляет собой схематичный вид сбоку эксцентрика.
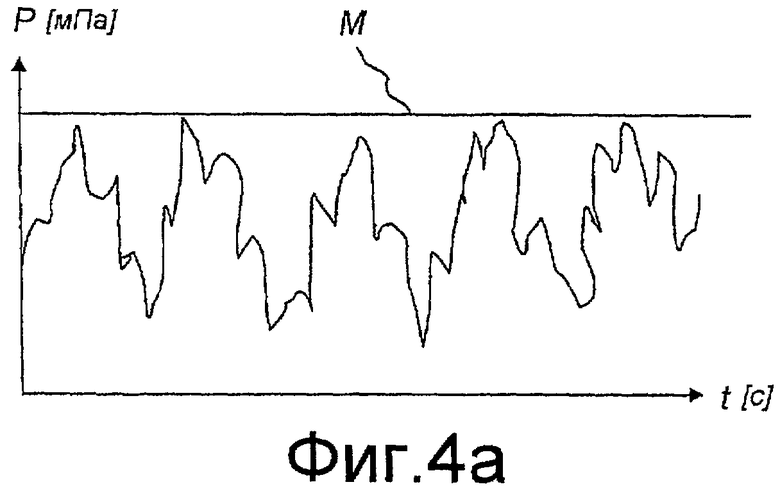
Фиг.4а представляет собой схематичную диаграмму, иллюстрирующую график гидравлического давления.
Фиг.4b представляет собой схематичную диаграмму, иллюстрирующую компонент среднего давления, полученный из фиг.4а.
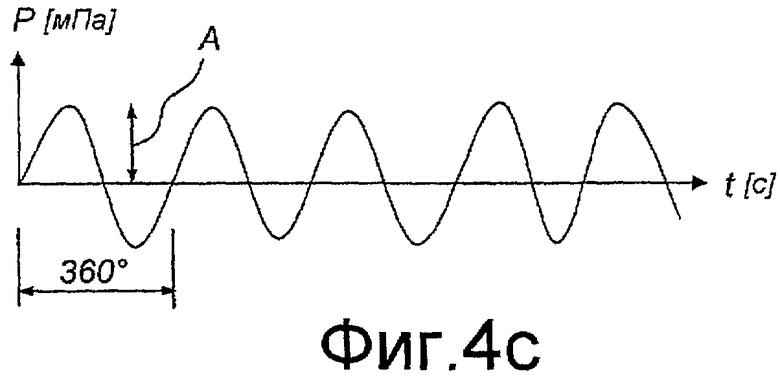
Фиг.4с представляет собой схематичную диаграмму, иллюстрирующую компонент давления, полученный из фиг.4а, который является синхронным с вращением эксцентрика, установленного в конусной дробилке, и который называется синхронным компонентом давления.
Фиг.4d представляет собой схематичную диаграмму, иллюстрирующую высокочастотный компонент переменного давления, полученного из фиг.4а.
Фиг.5 представляет собой схематичный вид измерительного инструмента.
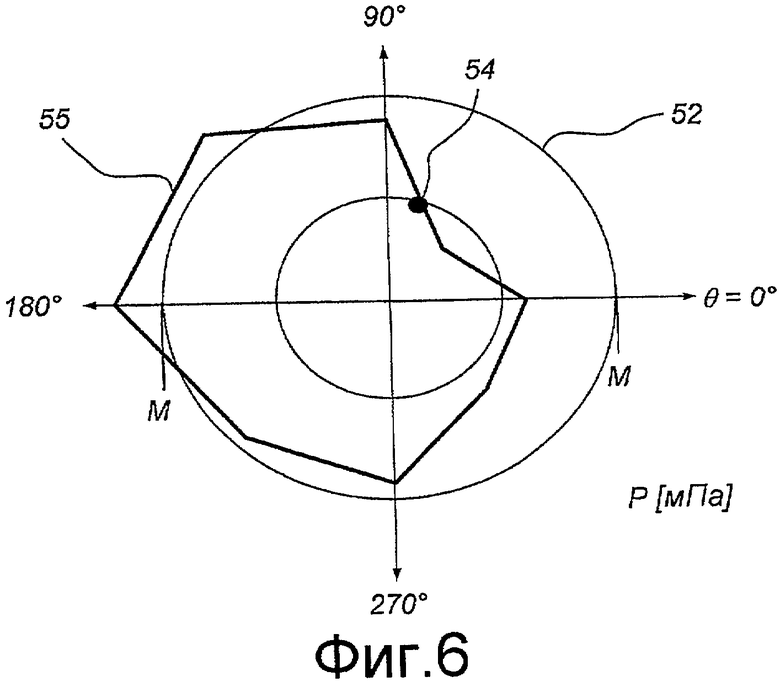
Фиг.6 представляет собой диаграмму, которая может быть показана на измерительном инструменте.
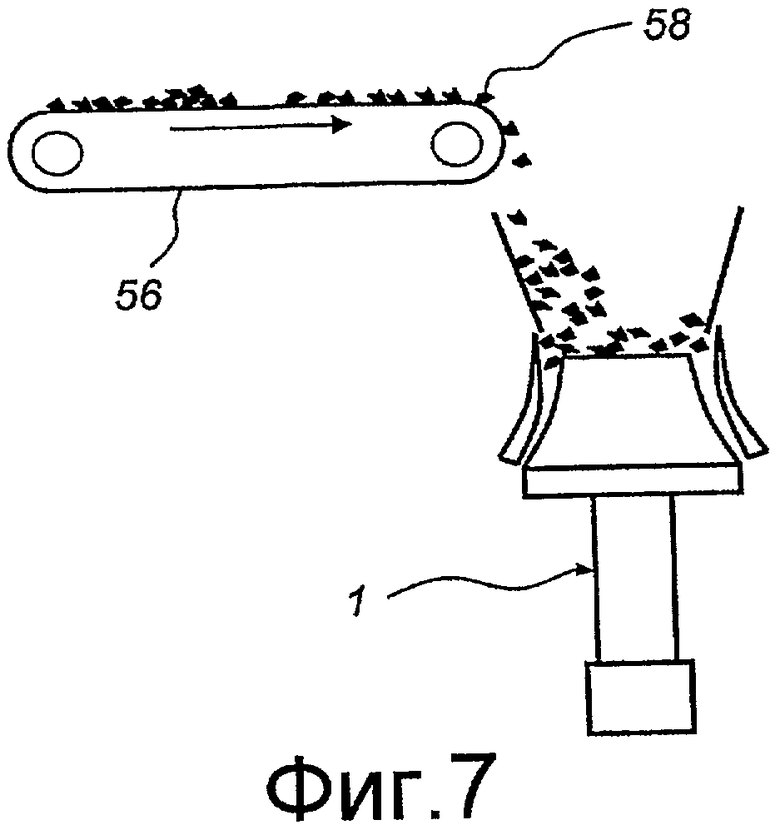
Фиг.7 представляет собой вид сбоку, схематично иллюстрирующий подачу материала, которая может выводить график, такой как график, показанный на фиг.6.
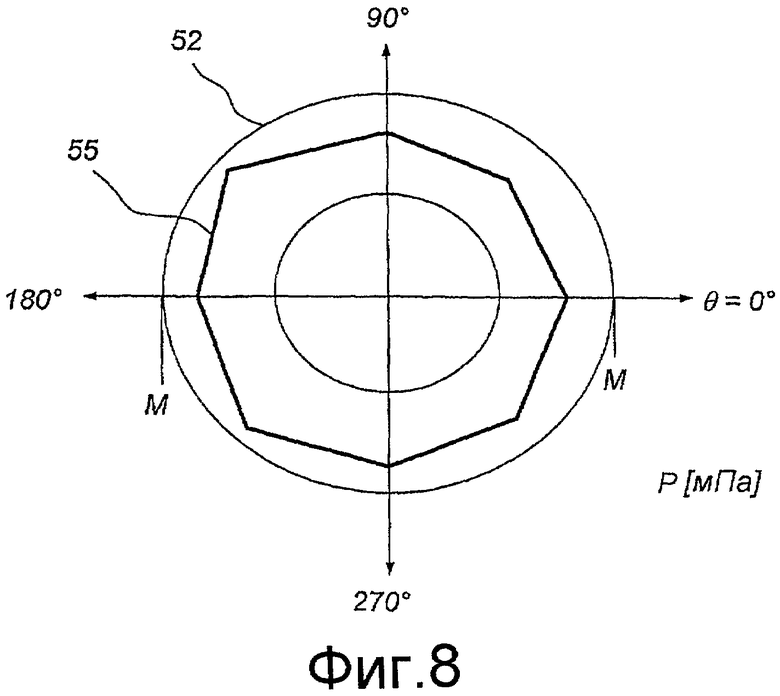
Фиг.8 представляет собой диаграмму, иллюстрирующую график, полученный после того, как были предприняты меры для улучшения подачи материала.
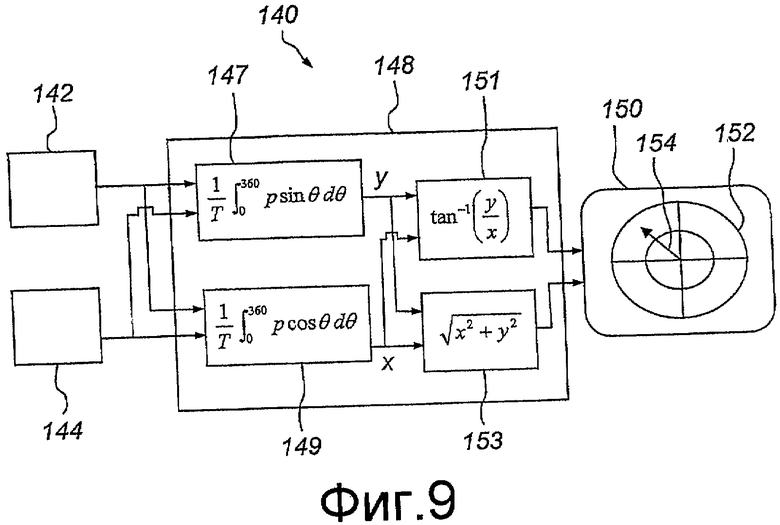
Фиг.9 представляет собой схематичный вид измерительного инструмента согласно альтернативному варианту осуществления.
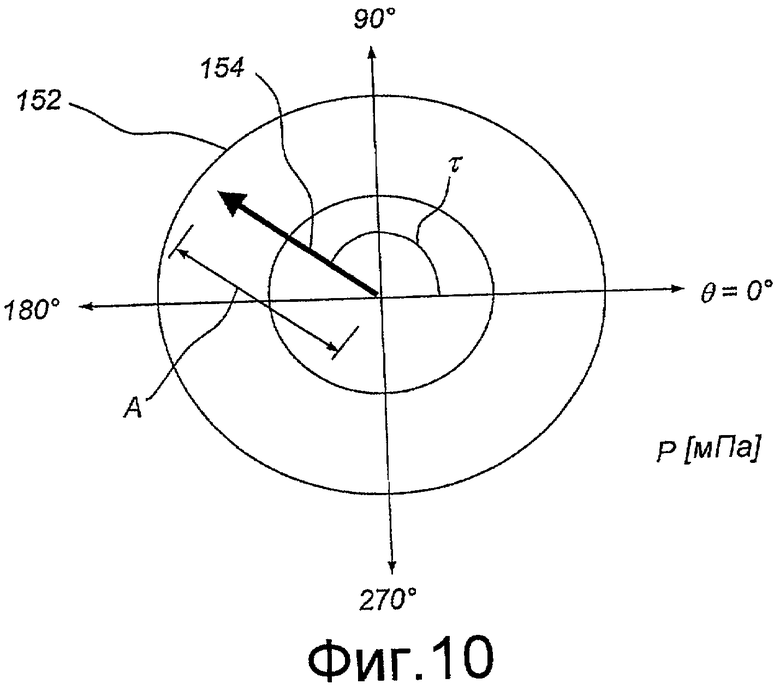
Фиг.10 представляет собой диаграмму, которая может быть показана на измерительном инструменте согласно альтернативному варианту осуществления.
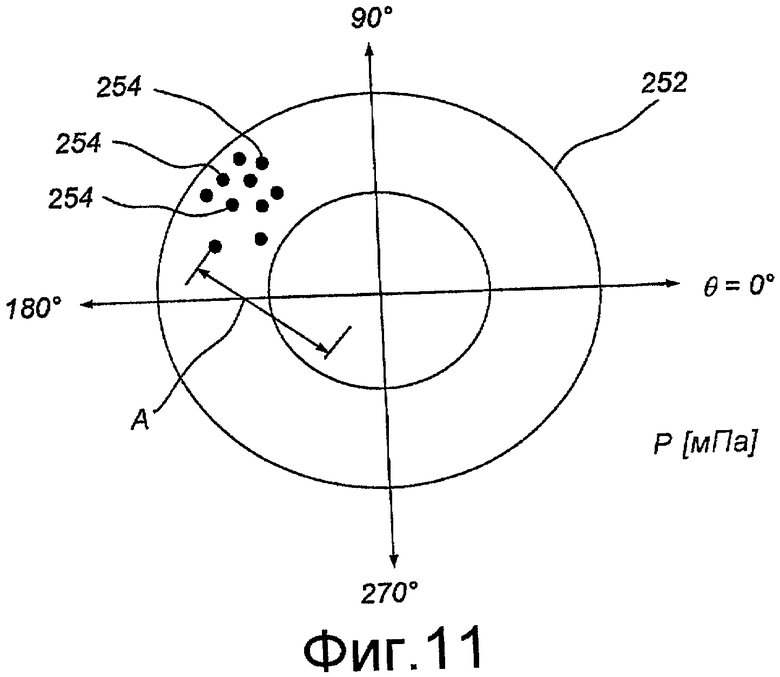
Фиг.11 представляет собой диаграмму согласно дополнительному альтернативному варианту осуществления.
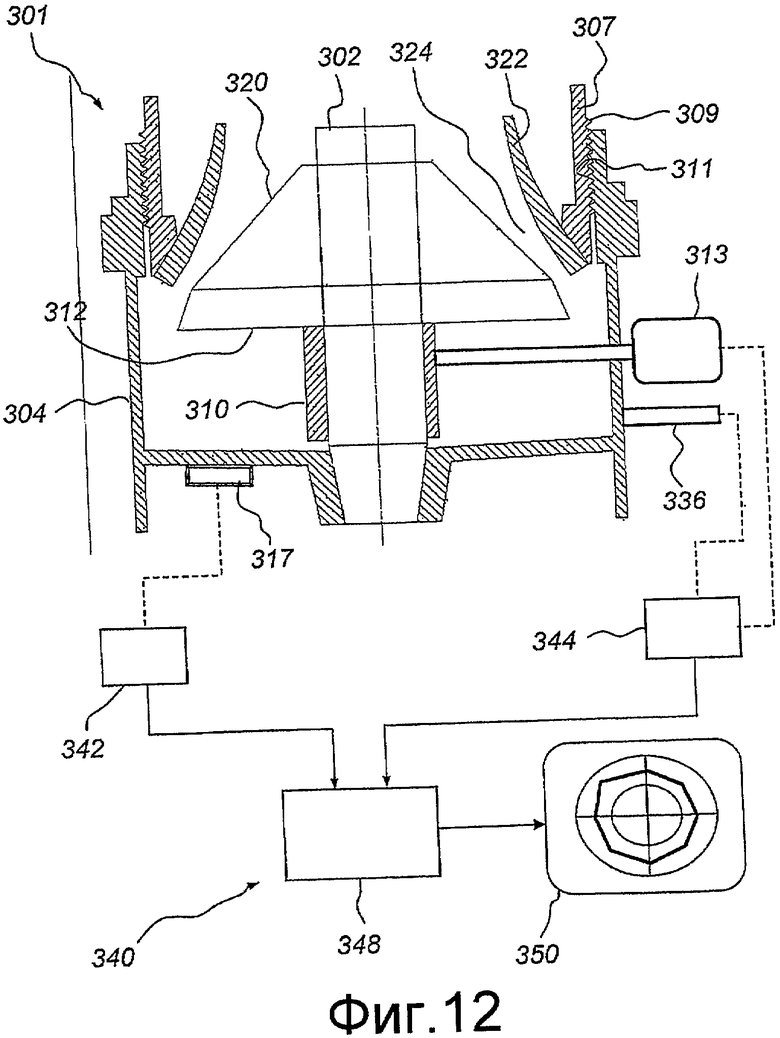
Фиг.12 представляет собой вид в вертикальном разрезе конусной дробилки согласно альтернативному варианту осуществления.
Подробное описание изобретения
Фиг.1 изображает схематично конусную дробилку 1. Конусная дробилка 1 имеет вертикальный вал 2 и раму 4, содержащую нижнюю часть 6 и верхнюю часть 8. Эксцентрик 10 установлен с возможностью вращения вокруг вертикального вала 2. Дробящий конус 12 неподвижно установлен вокруг вертикального вала 2. Приводной вал 14 установлен с возможностью вращения эксцентрика 10 посредством электродвигателя (не показан). Вертикальный вал 2 установлен у его верхнего конца 16 в верхнем подшипнике 18 в верхней части 8 рамы. Поскольку приводной вал 14 вращает эксцентрик 10 во время работы конусной дробилки, дробящий конус 12 будет выполнен с возможностью вращения, выполняя в связи с этим вращательное перемещение.
Первая дробильная броня в виде внутренней брони 20 неподвижно установлена на дробящем конусе 12. Вторая дробильная броня в виде внешней брони 22 неподвижно установлена на верхней части 8 рамы. Между двумя бронями 20, 22 образован рабочий зазор 24, ширина которого в осевом разрезе уменьшается в направлении вниз, как показано в фиг.1. Материал для дробления может быть введен в рабочий зазор 24 и раздроблен между внутренней броней 20 и внешней броней 22 благодаря вращательному перемещению дробящего конуса 12, во время которого две брони 20, 22 приближаются одна к другой вдоль образующей вращения и удаляются одна от другой вдоль диаметрально противоположной образующей.
Гидронасос 26 выполнен с возможностью подачи гидравлической текучей среды под давлением через канал 28 к поршневому гидравлическому устройству 30, расположенному под вертикальным валом 2. Поршневое гидравлическое устройство 30 обеспечивает регулирование вертикального положения вала 2 и поглощение нагрузок, создаваемых дробящимся материалом в рабочем зазоре 24. Датчик давления в виде манометра 32 выполнен с возможностью измерения давления в канале 28, соответствующего давлению в поршневом гидравлическом устройстве 30, и указывает нагрузку на дробилку 1.
На фиг.2 показана дробилка 1, если смотреть в разрезе II-II на фиг.1. Для полной ясности на фиг.2 показана только внешняя броня 22, вертикальный вал 2, который поддерживает дробящий конус 12, и внутренняя броня 20, которая закреплена на внешней стороне дробящего конуса 12. Как показано на фиг.2, рабочий зазор 24 будет иметь наиболее узкую ширину, обозначенную CSS, в положении, в котором внутренняя броня 20 расположена наиболее близко к внешней броне 22. Поскольку эксцентрик 10, который показан на фиг.1 и фиг.3, вращается, положение наиболее узкой ширины CSS будет перемещаться вдоль внутренней периферии 34 внешней брони 22 в направлении против часовой стрелки, как обозначено стрелкой R. Текущее положение CSS вдоль внутренней периферии 34 внешней брони 22 именуется ниже как «положение вращения» и представлено на фиг.2 с помощью угла θ. Следовательно, на фиг.2 положение вращения, т.е. точка на внутренней периферии 34 внешней брони 22, к которой наиболее близко в данный момент расположена внутренняя броня 20, расположена в верхнем правом углу. Один подходящий способ описания текущего положения вращения состоит в том, чтобы выбрать начальную точку на внутренней периферии 34 внешней брони 22 и, основываясь на этой начальной точке, указывать количество градусов полного поворота, т.е. 360°, которое имеет положение вращения, перемещаемое в данный момент. Таким образом, на фиг.2 правый конец внутренней брони 20, например, может быть выбран в качестве начальной точки, т.е. 0°, при этом положение вращения, θ, которое показано на фиг.2, соответствует CSS, перемещенному на около 70° от начальной точки, в направлении, указанном стрелкой R, т.е. θ=70°.
Во время операции дробления материал для дробления будет расположен между внутренней броней 20 и внешней броней 22, т.е. в рабочем зазоре 24, что означает, что внутренняя броня 20 перекатывается по внешней броне 22 в направлении против часовой стрелки, как показано стрелкой S, что, таким образом, означает, что во время дробления вертикальный вал 2 вращается по часовой стрелке вокруг своей собственной оси.
На фиг.3 показан эксцентрик 10 более подробно. Эксцентрик 10 выполнен с эксцентриковым отверстием 35, в котором с возможностью вращения расположен вертикальный вал 2. Стрелка E указывает направление вращения, в котором эксцентрик 10 вынужден вращаться посредством приводного вала 14, показанного на фиг.1. Вращение согласно стрелке E на фиг.3, будет вызывать перемещение CSS, показанное на фиг.2, в направлении стрелки R вдоль внутренней периферии 34 внешней брони 22. По меньшей мере, один сенсорный элемент, которым может быть, например, магнитный элемент 36, прикреплен к эксцентрику 10. Магнитный элемент 36 будет вращаться вместе с эксцентриком 10. Датчик, которым в данном случае является соответственно магнитный датчик 38, прикреплен к нижней части 6 рамы и выполнен с возможностью определения прохождения магнитного элемента 36.
Поскольку CSS является наиболее узкой частью рабочего зазора 24, наибольшие усилия дробления в дробилке 1 будут обычно, в данный момент, возникать в положении на внутренней периферии 34 внешней брони 22, где в данный момент находится CSS, т.е. в положении, определенном выше, как положение вращения θ. В примере, показанном на фиг.3, наибольшие усилия дробления в дробилке будут, таким образом, возникать в верхней правой части, как показано в фиг.2.
На фиг.4а схематично показан профиль давления, измеренного посредством манометра 32 во время дробления материала в дробилке 1. Продольная ось, ось х, указывает время t, например, в секундах, а поперечная ось, ось y, указывает давление P в гидравлической текучей среде. Давление Р в гидравлической текучей среде представляет собой величину нагрузки, воздействующей на дробилку 1. Обычно дробилка работает таким образом, что некоторое максимальное давление, обозначенное как давление М на фиг.4а, не может быть превышено. Если давление М превышается, наиболее узкая ширина CSS увеличивается посредством опускания вертикального вала 2 посредством поршневого гидравлического устройства 30, показанного на фиг.1, что уменьшает нагрузку на дробилку 1.
Было обнаружено, что профиль давления, показанный на фиг.4а, может быть разделен на три основных компонента, которые изображены на фиг.4b, 4c и 4d. Суммированием этих трех основных компонентов будет достигнут профиль давления, показанный на фиг.4а.
Первым компонентом является среднее давление, как показано на фиг.4b. Желательно выдерживать среднее давление настолько высоким, насколько возможно, не превышая максимального давления М согласно фиг.4а, поскольку это означает, что дробилка 1 работает эффективно.
На фиг.4с показан второй компонент давления, который является синхронным с вращением эксцентрика 10. Этот компонент давления, который может быть упомянут как синхронный компонент давления, имеет синусоидальную форму, где один цикл соответствует одному обороту, т.е. 360°, эксцентрика 10, как показано на фиг.4с. Кроме того, было обнаружено, что этот компонент давления, который показан на фиг.4с, зависит от неровности в подаче материала в дробилке. Такая неровность, например, может быть обусловлена тем, что подача материала в дробилку является такой, что большая часть материала заканчивается на одной стороне дробилки или что материал является разделенным на компоненты, т.е. неравномерно распределенным в отношении крупной и мелкой фракций, уже когда подается к дробилке. Разделение на компоненты может приводить к тому, что один конец дробилки получает, в основном, мелкий материал, а другой конец получает, в основном, крупный материал. Поскольку операция дробления мелкого материала обычно приводит к значительно большим нагрузкам на дробилку, такое разделение означает, что нагрузки неравномерно прилагаются на дробилку 1, даже если подача материала в килограммах в час является по существу равномерной, как видно вдоль внутренней периферии 34 внешней брони 22. На фиг.4с стрелка указывает амплитуду А синусоидального графика, т.е. синхронного компонента давления. Желательно выдерживать амплитуду А синхронного компонента давления настолько малой, насколько возможно, поскольку малая амплитуда А означает, что усилия дробления, когда эксцентрик 10 совершает полный поворот, т.е. 360°, являются более или менее одинаковыми во время полного поворота, что означает, что операция дробления дробилки является эффективной. Регулированием подачи материала к дробилке 1 можно уменьшить амплитуду А, как будет показано ниже, что означает, что операция дробления может быть выполнена еще более эффективно.
На фиг.4d показан третий компонент давления. Этот компонент давления иллюстрирует высокочастотный компонент изменения давления, которое обусловлено тем, что различные конкретные объекты, например камни, требуют больше или меньше усилий для дробления и, следовательно, дают различные отклонения манометра 32. Этот компонент давления зависит от конкретных объектов, подаваемых в дробилку, и обычно не может подвергаться регулированию подачей материала в дробилку.
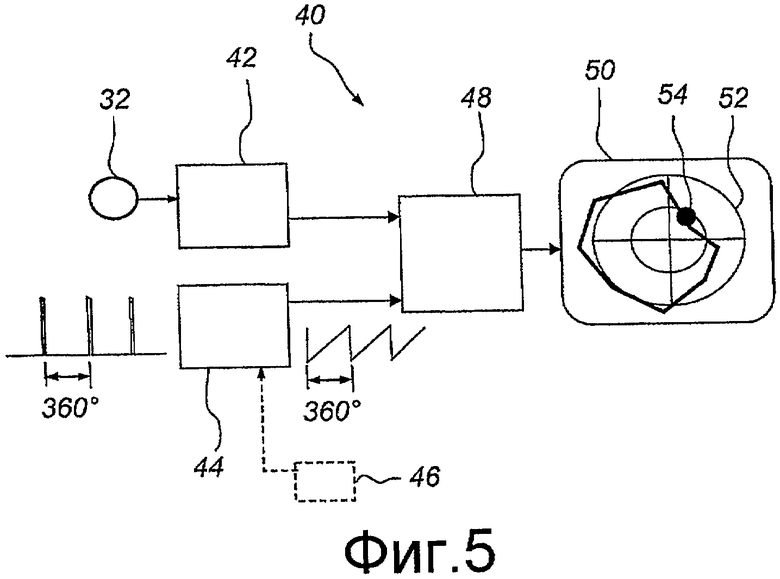
На фиг.5 показан измерительный инструмент 40, посредством которого можно анализировать измеренный профиль давления, показанный на фиг.4а, и указывать, где вдоль внутренней периферии 34 внешней брони 22 нагрузка у CSS будет слишком высокой, а также где вдоль внутренней периферии 34 внешней брони 22 может быть подано больше материала без возникновения слишком высокой нагрузки у CSS.
Измерительный инструмент 40 содержит первый приемник сигнала в виде приемника 42 сигнала для измерения давления и второй приемник сигнала в виде приемника 44 сигнала для измерения вращения. Приемник 42 сигнала для измерения давления принимает сигнал от манометра 32, представляющий собой текущее мгновенное давление в гидравлической текучей среде. Мгновенное давление гидравлической текучей среды в поршневом гидравлическом устройстве 30, показанном на фиг.1, зависит от текущей нагрузки на дробилку 1, и, следовательно, приемник 42 сигнала для измерения давления принимает сигнал, который согласовывается с текущей мгновенной нагрузкой на дробилку 1. Приемник 44 сигнала для измерения вращения принимает измеренный сигнал от магнитного датчика 38, который показан на фиг.3. Магнитный датчик 38 указывает каждый оборот эксцентрика 10.
Согласно первому альтернативному варианту приемник 44 сигнала для измерения вращения содержит блок фазовой подстройки частоты (PLL), который по существу известен и посредством которого приемник 44 сигнала для измерения вращения способен вычислять текущее угловое положение эксцентрика 10, т.е. в каждый момент времени приемник 44 сигнала для измерения вращения способен вычислять текущее положения вращения, т.е. текущий угол θ. На фиг.5 схематично показано, как блок фазовой подстройки частоты (PLL) в приемнике 44 сигнала для измерения вращения преобразует дискретные импульсы от магнитного датчика 38 к непрерывному угловому положению.
Согласно одному альтернативному варианту осуществления, который показан пунктирными линиями на фиг.5, приемник 44 сигнала для измерения вращения принимает второй измеренный сигнал от привода 46 дробилки. Измеренный сигнал от привода 46 дробилки указывает, непосредственно или косвенно посредством скорости двигателя, текущую скорость эксцентрика 10. Используя информацию от датчика 38 и текущую скорость эксцентрика 10, приемник 44 сигнала для измерения вращения способен вычислить в каждый момент времени точное положение вращения и, таким образом, способен вычислить текущее положение вращения внутренней брони 20 относительно внешней брони 22, т.е. где в данный момент расположено CSS вдоль внутренней периферии 34 внешней брони 22.
Измерительный инструмент 40 дополнительно содержит корреляционное устройство в виде вычислительного процессора 48. Процессор 48 принимает сигналы от приемника 42 сигнала для измерения давления и приемника 44 сигнала для измерения вращения и согласовывает, по меньшей мере, одно измеренное мгновенное давление в гидравлической текучей среде, т.е. мгновенную нагрузку на дробилку 1, с соответствующим положением вращения, углом θ, т.е. положением CSS вдоль внутренней периферии 34 внешней брони 22, которое соответствует мгновенной нагрузке. Процессор 48 передает информацию, касающуюся измеренной мгновенной нагрузки и положения вращения, согласованного с ней, на индикаторную шкалу в виде экрана 50 дисплея, например, экрана жидкокристаллического дисплея (LCD). Экран 50 дисплея отображает круговую диаграмму 52, которая предназначена для отображения дробилки 1 сверху или, более конкретно, внешней брони 22 в горизонтальном разрезе, показанной на фиг.2. Каждая точка на окружности круговой диаграммы 52 соответствует точке вдоль внутренней периферии 34 внешней брони 22. На фиг.5 показана точка 54, которая указывает положение CSS, т.е. положение вращения вдоль внутренней периферии 34 внешней брони 22, показанное на фиг.2, т.е. слегка вправо от самого высокого положения внешней брони 22, показанной на фиг.2. На диаграмме 52, показанной на фиг.5, величина мгновенной нагрузки, выраженная, например, как давление в МПа, показана посредством расстояния от точки 54 до начала координат диаграммы 52. Таким образом, точка 54 указывает, где вдоль внутренней периферии 34 внешней брони 22 измерена мгновенная нагрузка и одновременно ее величина.
Фиг.6 представляет собой увеличенный вид диаграммы 52, показанной на фиг.5. На диаграмме 52 внешняя окружность представляет максимально желательную нагрузку М в дробилке 1. Диаграмма 52 иллюстрирует полярный график 55, который представляет измеренные мгновенные нагрузки, представленные давлениями Р, измеренными в гидравлической текучей среде, например, в восьми точках вдоль внутренней периферии 34 внешней брони 22, т.е. каждые 45° вдоль внутренней периферии 34. Эти восемь точек затем соединены с образованием полярного графика. Восемь точек могут или указывать измеренные мгновенные нагрузки во время последнего оборота, или могут указывать, в качестве примера, среднюю мгновенную нагрузку для каждой из восьми точек во время, например, последних десяти оборотов. Положение CSS, показанное на фиг.2, изображено посредством точки 54. Следует понимать, что также возможно отображать мгновенное давление в большем или меньшем количестве точек, чем восемь точек вдоль внутренней периферии 34 внешней брони 22, однако целесообразно, по меньшей мере, три точки.
Диаграмма 52, показанная на фиг.6, изображает, что нагрузка на дробилку 1 является значительной на левой стороне дробилки 1, т.е. согласно фиг.6 около θ=180°. Однако нагрузка на правой стороне дробилки 1, т.е. около θ=0° и, в частности, в верхней правой стороне, при θ=45°, является значительно меньшей. Следовательно, диаграмма 52 изображает, что нагрузка на дробилку неравномерная и что работа дробилки неэффективна.
На фиг.7 показана подача материала 58 к дробилке 1 посредством ленточного конвейера 56. Как показано на фиг.7, большая часть материала заканчивается в левой стороне дробилки 1, что объясняет неравномерную нагрузку, показанную на диаграмме 52 на фиг.6. Часто, во время реальной работы, показанной на фиг.7, очень трудно визуально определить неравномерную подачу, и диаграмма 52, показанная на фиг.6, таким образом, позволяет оператору наиболее благоприятно определить, где в дробилке 1 количество подаваемого материала является неравномерным.
На фиг.8 показана диаграмма 52, показанная на фиг.6, после того как предприняты меры для получения более равномерной подачи материала в дробилку 1. Такие меры могут включать регулирование положения ленточного конвейера 56, регулирование распределения материала 58 на ленточном конвейере 56 для уменьшения разделения мелкого и крупного материала, регулирование способа, которым материал подается на ленточный конвейер 56, регулирование материала, который подается на ленточный конвейер 56, и т.д. Как видно из фиг.8, различия между измеренными мгновенными давлениями в восьми точках значительно меньше, чем на фиг.6. Это приводит к более высокому среднему давлению в дробилке, т.е. давление, показанное на фиг.4b, может быть увеличенным, что обеспечивает более эффективное использование дробилки 1 без избыточных нагрузок, т.е. без превышения максимального давления М, показанного на фиг.4а. Таким образом, измерительный инструмент 40 помогает оператору регулировать дробилку 1, в частности, материал, подаваемый к дробилке 1, так что работа дробилки 1 становится настолько эффективной, насколько возможно. Чем больше форма полярного графика напоминает точную окружность с его центром в начале координат, тем более равномерна подача материала к дробилке 1 и тем более эффективна работа дробилки 1. Радиус такой точной окружности соответствует среднему давлению, которое должно быть настолько высоким, насколько возможно, не превышая максимально допустимого давления М.
На фиг.9 показан альтернативный вариант осуществления в виде измерительного инструмента 140, посредством которого можно анализировать измеренный профиль давления, показанный на фиг.4а. Принципы, вытекающие из этого анализа, слегка отличаются от анализа, выполненного вышеописанным измерительным инструментом 40. Измерительный инструмент 140 выполнен с возможностью анализа синхронного компонента давления, показанного на фиг.4с, и указания амплитуды и фазового угла синхронного компонента давления, т.е. величины амплитуды А, показанной на фиг.4с, а также места вдоль внутренней периферии 34 внешней брони 22, в котором амплитуда А возникает.
Измерительный инструмент 140 содержит первый приемник сигнала в виде приемника 142 сигнала для измерения давления и второй приемник сигнала в виде приемника 144 сигнала для измерения вращения. Работа приемника 142 сигнала для измерения давления аналогична работе приемника 42 сигнала для измерения давления, как описано выше. Приемник 144 сигнала для измерения вращения принимает измерительный сигнал от магнитного датчика 38. Магнитный датчик 38 указывает каждый оборот эксцентрика 10. Приемник 144 сигнала для измерения вращения содержит блок фазовой подстройки частоты (PLL), который по существу известен и посредством которого приемник 144 сигнала для измерения вращения способен вычислять непрерывное текущее угловое положение эксцентрика 10, т.е. в каждый момент времени приемник 144 сигнала для измерения вращения способен вычислять текущее положения вращения, т.е. текущий угол θ, согласно принципам, описанным выше относительно фиг.5.
После того как текущее положение вращения дробилки 1 определено, т.е. текущий угол θ определен с помощью блока PLL, как описано выше, в процессоре 148 вырабатываются внутренние синусоидальные и косинусоидальные сигналы, основанные на текущем положении вращения, т.е. текущем угле θ. Эти сигналы имеют одинаковые циклы, как и вращение эксцентрика 10 дробилки 1, и являются синхронными относительно эксцентрика. Это означает, что синусоидальные и косинусоидальные сигналы выполняют полный цикл с каждым оборотом эксцентрика 10. Посредством вычисления произведения каждого из этих сигналов и сигнала давления Р от приемника 142 сигнала для измерения давления, интегрирования каждого из этих двух произведений в течение оборота и затем деления этих произведений на период одного оборота, т.е. время одного оборота, получаются коэффициенты Фурье для сигнала давления на частоте вращения эксцентрика 10. Вычисление этих коэффициентов Фурье относительно y и x показано на фиг.9 в блоках 147 и 149 соответственно, объединенных в процессоре 148. Коэффициенты Фурье представляют координаты x и y для синхронного компонента давления и точки для участка внутренней периферии 34 внешней брони 22, в которых усилия дробления являются наибольшими, т.е. для части дробилки 1, к которой подается большая часть материала, и/или к которой подается большая часть материала, которая является наиболее трудной для дробления. Основываясь на этих коэффициентах Фурье x и y и ссылаясь на точку на внутренней периферии 34 внешней брони 22, у которой усилия дробления являются наибольшими, фазовый угол синхронной компоненты затем вычисляется в блоке 151, показанном на фиг.9, и амплитуда синхронного компонента давления, т.е. амплитуда А, показанная на фиг.4с, вычисляется в блоке 153, показанном на фиг.9. Процессор 148 передает информацию о фазовом угле и амплитуде на экран 150 дисплея, на котором отображается диаграмма 152. На диаграмме 152 фазовый угол и амплитуда представлены вектором 154, который будет описан более подробно ниже.
На фиг.10 показана диаграмма 152 более подробно. Вектор 154 указывает направление точки, которая соответствует точке вдоль внутренней периферии 34 внешней брони 22, у которой измерена амплитуда А, т.е. угол τ вектора 154 соответствует фазовому углу, который вычислен процессором 148 согласно вышеизложенному. Длина вектора 154 от начала координат соответствует величине, в МПа, амплитуды А синхронного компонента давления, вычисленного процессором 148. Диаграмма 152, показанная на фиг.10, отображает оператору, где в дробилке 1 синхронный компонент давления, показанный на фиг.4с, является наибольшим и, следовательно, должен быть уменьшен для обеспечения более высокой средней нагрузки на дробилку 1 без превышения максимально допустимого давления М в гидравлической текучей среде. Целью является получение полностью равномерной подачи в дробилку 1, что соответствует вектору 154, совершенно не имеющему длины, поскольку амплитуда А синхронной компоненты давления составляет 0 МПа, когда подача материала в дробилку полностью равномерна. Следовательно, оператор должен выполнить такие уточнения для подачи, что длина вектора 154 уменьшена до минимума. Фазовый угол вектора 154 указывает оператору, где вдоль внутренней периферии 34 внешней брони 22 усилия дробления являются наибольшими, так что меры могут быть предприняты сначала в этой области.
На фиг.11 показана дополнительная альтернативная диаграмма 252. В этой диаграмме 252 в качестве точек 254 изображены соответствующие величины фазового угла и амплитуды А, которые вычислены процессором 148 во время последних десяти оборотов эксцентрика 10. Расстояние от каждой точки 254 до начала координат соответствует амплитуде А, в МПа, соответствующего синхронного компонента давления. Аналогично диаграмме 152, показанной на фиг.10, диаграмма 252 показывает оператору, где усилия дробления наибольшие и куда должны быть направлены меры для улучшения подачи. Целью является регулирование подачи материала таким образом, что точки 254 будут расположены вблизи начала координат на диаграмме 252.
На фиг.12 показана другая дробилка 301, отличающаяся от дробилки 1, показанной на фиг.1. Дробилка 301, показанная на фиг.12, имеет вал 302, который поддерживает дробящий конус 312, имеющий внутреннюю броню 320, установленную в нем. Рабочий зазор 324 образован между внутренней броней 320 и внешней броней 322. Внешняя броня 322 прикреплена к втулке 307 со ступенчатой резьбой 309. Резьба 309 вводится в соответствующую резьбу 311 в раме 304 дробилки. Кроме того, к дробилке 301 присоединен электродвигатель 313, который выполнен с возможностью, во время работы дробилки 301, приведения в действие эксцентрика 310 и обеспечения вращательного маятникового движения дробящего конуса 312. Поскольку втулка 307 вращается вокруг оси симметрии, внешняя броня 322 будет перемещаться в вертикальном направлении, что изменяет ширину зазора 324.
Следовательно, дробилка 301, показанная на фиг.12, не имеет гидравлической системы, в которой гидравлическое давление может быть измерено для измерения нагрузки на дробилку. Вместо этого на раме 304 дробилки расположен тензодатчик 317. Тензодатчик 317, который измеряет мгновенную деформацию в части рамы 304, на которой он закреплен, соответственно расположен на раме 304 в таком положении, в котором достигается обычный вид механической нагрузки. Сигнал от тензодатчика 317 может быть принят в первом приемнике сигнала в виде приемника 342 сигнала нагрузки. Дробилка 301 дополнительно снабжена акселерометром 336. Вращение эксцентрика 310 в дробилке 301 будет обуславливать перемещение в раме 304, поскольку центр тяжести дробящего конуса 312 поворачивается по круговой траектории. Это перемещение измеряется акселерометром 336, который передает сигнал второму приемнику сигнала в виде приемника 344 сигнала измеренного вращения. Тогда для приемника 344 сигнала измеренного вращения можно вычислить, например, посредством блока фазовой подстройки частоты (PLL), как описано выше, или, в качестве альтернативы, посредством сигнала от двигателя 313, который показывает скорость эксцентрика 310, текущее положение вращения эксцентрика 310 и, тем самым, текущее положение наиболее узкого расстояния CSS, т.е. положение вращения согласно вышеописанным принципам. Одним преимуществом акселерометра 336 является то, что он расположен на внешней стороне дробилки 301 и, таким образом, хорошо защищен от дробимого материала. Другим преимуществом является то, что для установки акселерометра 336 в дробилке 301 необходимы небольшие операции. Измерительный инструмент 340, который дополнительно к приемнику 342 сигнала нагрузки и приемнику 344 сигнала измеренного вращения также содержит корреляционное устройство в виде вычислительного процессора 348 и экран 350 дисплея, тогда может согласовывать, согласно вышеописанным принципам, измеренную мгновенную нагрузку с соответствующим положением вращения внутренней брони 320 относительно внешней броней 322, т.е. соответствующим положением CSS, и отображать результат на диаграмме, например, на диаграмме, показанной на любой из фиг.6, 8, 10 и 11.
Таким образом, настоящее изобретение может быть использовано в различных типах конусных дробилок, и как мгновенная нагрузка, так и текущее положение вращения внутренней брони могут быть измерены различными путями и различными устройствами.
Следует понимать, что возможно множество изменений вышеописанных вариантов осуществления в объеме настоящего изобретения, определенного приложенной формулой изобретения.
Выше было описано, как магнитный датчик 38 может быть использован для непосредственного измерения положения вращения внутренней брони 20 и как акселерометр 336 может быть использован для непосредственного измерения положения вращения внутренней брони 20. Следует понимать, что магнитный датчик 38 может также быть использован в дробилке 301 и что акселерометр 336 может быть использован в дробилке 1. Также следует понимать, что другие типы датчиков могут быть использованы для прямых или косвенных измерений положения вращения внутренней брони.
Выше были описаны два различных принципа для представления величин нагрузки на дробилку и положения CSS. На фиг.5-8 показано, как действительная мгновенная нагрузка, представленная мгновенным гидравлическим давлением, связана с положением θ вращения. В этом случае целью оператора является получение графика 55, который настолько близок к точной окружности, насколько это возможно, и который центрирован относительно начала координат, поскольку это означает по возможности равномерную подачу материала в дробилку 1. На фиг.9-11 показан другой принцип, согласно которому амплитуда А и фазовый угол синхронного компонента давления вычисляются из соответствующих величин мгновенной нагрузки и положения вращения и изображаются вектором 154. В этом случае целью оператора является получение настолько короткого вектора 154, насколько это возможно, поскольку это означает по возможности равномерную подачу материала в дробилку 1. Естественно, существуют дополнительные способы представления соответствующих величин положения вращения и нагрузки или синхронного компонента давления, такие как гистограммы, линейные графики, точечные диаграммы, чертежи в таблицах и т.д., на экране 50 дисплея.
Применительно к фиг.9-11 описан способ вычисления амплитуды и фазового угла синхронного компонента давления. Следует понимать, что существуют другие способы достижения этого. Одной возможностью является фильтрация сигнала с манометра 32 посредством полосового фильтра, настроенного на текущую частоту вращения эксцентрика 10.
Выше было описано, как оператор считывает информацию, показанную на экране 50 дисплея, и принимает решения относительно установок подачи и т.д. В качестве альтернативы экрану 50 дисплея или в комбинации с экраном 50 дисплея также возможно соединить измерительный инструмент 40, 140 непосредственно с управляющим устройством. Это управляющее устройство может тогда автоматически регулировать, например посредством гидравлических цилиндров, положение, например, ленточного конвейера 56 или вибрационного устройства подачи для получения наилучшей подачи, т.е. подача регулируется автоматически до тех пор, пока измерительный инструмент 40, 140 измеряет относительно равномерную нагрузку на дробилку вдоль всей внутренней периферии 34 внешней брони 22.
В вышеприведенном описании индикаторной шкалой является экран дисплея. Следует понимать, что другие типы индикаторных шкал могут быть использованы, такие как аналоговые индикаторные инструменты.
Заявка на патент Швеции № 0701638-9, по которой испрашивается приоритет, включена здесь посредством ссылки.
Изобретение относится к измерительному инструменту для индикации нагрузки в конусной дробилке. Инструмент содержит первое измерительное устройство для измерения, по меньшей мере, одной мгновенной нагрузки на дробилку и второе измерительное устройство для измерения положения вращения внутренней брони относительно внешней брони. Также имеется корреляционное устройство, выполненное с возможностью согласования, по меньшей мере, одной мгновенной нагрузки на дробилку с соответствующим измеренным положением вращения внутренней брони относительно внешней брони. Технический результат заключается в создании измерительного инструмента, с помощью которого можно получить информацию о том, работает ли дробилка эффективно или нет. 3 н. и 9 з.п. ф-лы, 15 ил.
1. Измерительный инструмент для индикации нагрузки в конусной дробилке, содержащей дробящий конус (12), на котором установлена внутренняя броня (20), раму (4), на которой установлена внешняя броня (22), при этом внешняя броня (22) образует вместе с внутренней броней (20) рабочий зазор (24), и приводное устройство (14), выполненное с возможностью обеспечения вращательного маятникового движения дробящего конуса (12) для дробления материала, который введен в рабочий зазор (24), отличающийся тем, что содержит
первое измерительное устройство (32, 42) для измерения, по меньшей мере, одной мгновенной нагрузки на дробилку (1),
второе измерительное устройство (38, 44) для измерения положения вращения внутренней брони (20) относительно внешней брони (22) и
корреляционное устройство (48), выполненное с возможностью согласования, по меньшей мере, одной мгновенной нагрузки на дробилку (1) с соответствующим измеренным положением вращения внутренней брони (20) относительно внешней брони (22).
2. Инструмент по п.1, дополнительно содержащий индикаторную шкалу, такую как экран (50) дисплея, выполненный с возможностью оптического отображения измеренного положения вращения и согласованной с ним мгновенной нагрузки.
3. Инструмент по п.1 или 2, содержащий индикаторную шкалу (50), выполненную с возможностью оптического отображения точки (54) вдоль внутренней периферии (34) внешней брони (22), в которой измеренная мгновенная нагрузка является наивысшей.
4. Инструмент по п.1, содержащий индикаторную шкалу (50; 150), выполненную с возможностью оптического отображения точки (54) вдоль внутренней периферии (34) внешней брони (22), в которой измеренная мгновенная нагрузка является наивысшей, и величины измеренной мгновенной нагрузки в этой точке.
5. Инструмент по п.4, в котором индикаторная шкала содержит вектор (154), который исходит из начала координат и направлен к точке вдоль внутренней периферии (34) внешней брони (22), в которой синхронный компонент давления измеренной нагрузки является наивысшим, при этом длина вектора (154) соответствует амплитуде синхронного компонента давления.
6. Инструмент по п.2, в котором индикаторная шкала содержит полярный график (55), который исходит из начала координат и показывает нагрузку, измеренную в, по меньшей мере, трех точках вдоль внутренней периферии (34) внешней брони (22).
7. Способ индикации функционирования конусной дробилки, содержащей дробящий конус (12), на котором установлена внутренняя броня (20), раму (4), на которой установлена внешняя броня (22), при этом внешняя броня (22) образует вместе с внутренней броней (20) рабочий зазор (24), и приводное устройство (14), выполненное с возможностью обеспечения вращательного маятникового движения дробящего конуса (12) для дробления материала, который введен в рабочий зазор (24), отличающийся тем, что
измеряют, по меньшей мере, одну мгновенную нагрузку на дробилку (1),
измеряют положение вращения внутренней брони (20) относительно внешней брони (22) и,
по меньшей мере, одну мгновенную нагрузку согласуют с соответствующим измеренным положением вращения внутренней брони (20) относительно внешней брони (22).
8. Способ по п.7, в котором наивысшую измеренную нагрузку вдоль внутренней периферии (34) внешней брони (22) определяют и согласуют с соответствующим положением вращения внутренней брони (20) относительно внешней брони (22).
9. Способ по п.7 или 8, в котором оптически отображают измеренное положение вращения и согласованную с ним мгновенную нагрузку.
10. Конусная дробилка, содержащая дробящий конус (12), на котором установлена внутренняя броня (20), раму (4), на которой установлена внешняя броня (22), при этом внешняя броня (22) образует вместе с внутренней броней (20) рабочий зазор (24), и приводное устройство (14), выполненное с возможностью обеспечения вращательного маятникового движения дробящего конуса (12) для дробления материала, который введен в рабочий зазор (24), отличающаяся тем, что содержит
первое измерительное устройство (32, 42) для измерения, по меньшей мере, одной мгновенной нагрузки на дробилку (1),
второе измерительное устройство (38, 44) для измерения положения вращения внутренней брони (20) относительно внешней брони (22) и
корреляционное устройство (48), выполненное с возможностью согласования, по меньшей мере, одной мгновенной нагрузки на дробилку (1) с соответствующим измеренным положением вращения внутренней брони (20) относительно внешней брони (22).
11. Дробилка по п.10, дополнительно содержащая устройство (36, 38) для измерения текущего положения вращения эксцентрика (10), установленного в дробилке и выполненного с возможностью обеспечения вращательного маятникового движения дробящего конуса (12).
12. Дробилка по п.10 или 11, содержащая акселерометр (336) для измерения текущего положения вращения внутренней брони (20).
| US 4856716 А, 15.08.1989 | |||
| WO 1993014870 A1, 15.08.1993 | |||
| US 20060231650 A1, 19.10.2006 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2001 |
|
RU2204438C1 |

