Настоящее изобретение касается способа поиска курса в направлении географического Севера.
Поиск географического Севера является фазой, предваряющей любую операцию наведения, указания, направления или навигации с целью определения контрольного курса, на основании которого определяют данные наведения или навигационные данные. Если направление или навигацию осуществляют при помощи системы, содержащей инерциальный счетчик текущих координат или инерциальный датчик-модуль, система становится операционной, после того как его «настроят» на этот курс.
Известно определение курса в направлении Севера с использованием определителя Севера, который содержит гироскоп, жестко закрепленный на полу в горизонтальном положении. Определитель Севера точно определяет направление на Север при отсутствии движения гироскопа относительно земной поверхности. Точность определения в основном зависит только от ухода гироскопа и даже от стабильности ухода гироскопа, когда производят два измерения на противоположных курсах. С другой стороны, самое незначительное движение гироскопа, даже не ощущаемое человеком, быстро снижает эту точность и приводит к ошибочному определению Севера. Настройку определителя Севера следует производить очень тщательно, чтобы избежать таких движений.
С помощью устройств, оборудованных инерциальным датчиком-модулем в комплекте, необходимом для инерциальной навигации, как известно, определяют курс в направлении Севера, используя данные инерциального датчика-модуля, работающего в режиме гирокомпаса, тогда как устройство фиксируют в положении относительно земной поверхности. Следует напомнить, что инерциальный датчик-модуль содержит три оси акселерометрического измерения и три оси гирометрического измерения. Настройка устройства состоит либо в приведении и затем в физическом удержании инерциального датчика-модуля в заранее определенном положении относительно локальной или инерциальной географической точки отсчета, либо в оценке и затем в сохранении при помощи вычислений угловых отклонений между локальной или инерциальной географической точкой отсчета и инерциальным датчиком-модулем.
В этом последнем случае комбинированное использование данных, поступающих от акселерометров и гирометров в сочетании с практическим отсутствием перемещения относительно Земли позволяет осуществить настройку и, следовательно, идентифицировать и поддерживать курс в центральной рабочей части датчика-модуля. Однако точность определенного таким образом курса зависит от точности акселерометров, стоимость которых резко возрастает в зависимости от требуемой точности. При одинаковой точности определитель Севера является намного дешевле гирокомпаса.
Следует отметить, что понятие гирокомпаса распространяется как на режим вычисления, так и на техническое устройство, специально выполненное для осуществления этого вычисления. Это же относится и к определителю Севера.
Настоящее изобретение призвано предложить средство, позволяющее оптимизировать поиск Севера при помощи инерциального датчика-модуля.
В этой связи, объектом настоящего изобретения является способ определения курса в направлении географического Севера при помощи инерциального датчика-модуля, содержащего три оси гирометрического измерения и три оси акселерометрического измерения, содержащий следующие этапы:
- используют данные инерциального датчика-модуля в режиме определителя Севера для получения первого значения курса,
- используют данные инерциального датчика-модуля в режиме гирокомпаса для получения второго значения курса,
- определяют курс в направлении Севера, используя первое значение курса и второе значение курса.
Таким образом, первое значение курса вычисляют, используя инерциальный датчик-модуль в качестве определителя Севера, то есть вычисляя курс на основании гирометрических данных, при этом акселерометрические данные не используют для вычисления самого курса, а только для определения средней горизонтальной плоскости относительно датчика-модуля. Второе значение курса вычисляют, используя режим гирокомпаса, то есть используя поток акселерометрических данных в дополнение к гирометрическим данным для оценки курса и относительного положения инерциального счетчика координат.
Предпочтительно вычисление курса содержит следующие этапы:
- вычисляют отклонение между первым значением курса и вторым значением курса,
- в качестве курса в направлении Севера берут первое значение курса и/или второе значение курса с учетом вычисленного отклонения.
Оба значения курса содержат погрешности, общая составляющая которых связана со средним уходом гирометров во время измерения, а их не общая составляющая связана с изменениями систематической ошибки (или смещения) акселерометров. Влиянием ухода акселерометрической ошибки можно пренебречь для первого значения курса, но оно может привести к погрешности курса, превышающей влияние гирометрических погрешностей, что касается второго значения курса. Вместе с тем, отклонение между двумя значениями курса не связано с уходом гирокомпасов, который исключают во время вычисления отклонения. В этом случае отклонение может служить дискриминирующей данной для простого и надежного выбора одного или другого значения курса в качестве курса в направлении Севера. Если отклонение является незначительным и даже нулевым, выбирают первое значение курса, которое является наиболее точным по абсолютной величине. В противном случае выбирают второе значение курса. Таким образом, способ в соответствии с настоящим изобретением позволяет выбрать наиболее эффективный рабочий режим в зависимости от условий измерения.
В частности, способ содержит этап оценки когерентности вычисляемого отклонения с гипотезой отсутствия движения инерциального счетчика координат относительно земли и:
- если отклонение является когерентным, в качестве курса в направлении Севера выбирают первое значение курса,
- если отклонение является некогерентным, в качестве курса в направлении Севера выбирают второе значение курса.
В случае необходимости, если отклонение не позволяет сделать вывод о когерентности отклонения с гипотезой отсутствия вращения датчика-модуля относительно земли, можно использовать комбинацию двух значений курса для получения выбранного курса.
Предпочтительно оценка когерентности содержит этап сравнения отклонения, взвешенного по косинусу широты, по меньшей мере, с одним пороговым значением, и предпочтительно пороговое значение равно квадратному корню из суммы квадрата типового отклонения составляющей среднего ухода Востока гирометров в течение времени измерения и квадрата типового отклонения среднего изменения систематической ошибки акселерометров в направлении Юга в течение времени измерения.
Этот вариант вычисления является исключительно эффективным для выбора значения курса. В варианте вычисление курса содержит следующие этапы:
- осуществляют весовую обработку первого значения курса и второго значения курса,
- осуществляют сложение взвешенных таким образом первого значения курса и второго значения курса для получения курса в направлении Севера, при этом весовую обработку определяют таким образом, чтобы свести к минимуму типовое отклонение погрешности курса в направлении Севера.
Это позволяет ограничить погрешности курса в случае движения и одновременно сохранить правильную статистическую точность в отсутствие углового движения датчика-модуля относительно земли, не прибегая к использованию дорогих акселерометров.
Предпочтительно способ содержит этап обнаружения движения инерциального датчика-модуля при помощи детектора, внешнего по отношению к инерциальному датчику-модулю, и выбора второго значения курса в качестве курса в направлении Севера.
Таким образом, если внешняя информация показывает, что инерциальный датчик-модуль был смещен, автоматически выбирают второе значение курса.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания не ограничительного частного варианта выполнения изобретения.
Это описание представлено со ссылками на единственную фигуру, на которой показана блок-схема осуществления способа в соответствии с настоящим изобретением.
Способ в соответствии с настоящим изобретением представляет собой поиск географического Севера при помощи инерциального датчика-модуля или инерциального счетчика 1 текущих координат, содержащего платформу с акселерометрами 3 (на фигуре показан только один из них), связанную через гирометры 5 (на фигуре показан только один) с неподвижной опорой 4, такой как корпус. Разумеется, описание и графическое представление инерциального счетчика координат предельно упрощены, поскольку конструкция инерциального счетчика координат не является объектом изобретения. Инерциальный счетчик 1 координат неподвижно соединен с устройством, таким как летательный аппарат с шасси, на котором жестко крепят корпус инерциального счетчика 1 координат.
Инерциальный счетчик 1 координат связан с вычислительным устройством 6, которое исполняет программу 7 управления инерциальным счетчиком 1 координат, выполненную также с возможностью вычисления курса в направлении географического Севера:
- в режиме определителя Севера с использованием сигналов данных, поступающих, по меньшей мере, от одного из пирометров 5,
- в режиме гирокомпаса с использованием также сигналов данных, поступающих от акселерометров 3.
Таким образом, способ в соответствии с настоящим изобретением содержит следующие этапы:
- используют данные инерциального счетчика 1 координат в режиме определителя Севера для получения первого значения курса CCN,
- используют данные инерциального счетчика 1 координат в режиме гирокомпаса для получения второго значения курса СGC.
Оба значения курса CCN и СGC содержат погрешность, включающую гирометрическую составляющую и акселерометрическую составляющую.
Гирометрическая составляющая погрешности курса, идентичная для вычисления первого значения курса и для вычисления второго значения курса, связана со средними уходами гирометров, проецируемыми на направление Восток-Запад. Гирометрическая составляющая погрешности курса равна DmE / (ΩТ * cos(LAL)), где DmE является средним уходом на направлении Восток, связанным со средними уходами гирометров (среднее значение за полезное время поиска севера), ΩТ является модулем скорости вращения Земли относительно инерциальной системы координат (то есть примерно 4375 мкрад/мин или 15,04°/час), и LAL является широтой настройки инерциального счетчика 1 координат во время поиска Севера.
Акселерометрическая составляющая погрешности курса является ничтожной по сравнению с гирометрической составляющей для первого значения курса CCN. Кроме того, погрешность на первом значении курса CCN содержит составляющую, связанную со средним вращением RmE центральной рабочей части инерциального счетчика 1 координат вокруг направления Восток (это вращение связано с движениями корпуса и, возможно, с микроскопическими вращениями и деформациями между корпусом и центральной рабочей частью), которая равна RmE / (ΩТ * cos(LAL)).
Акселерометрическая составляющая погрешности курса для второго значения курса СGC связана с линейно нарастающими функциями систематических ошибок акселерометров и равна (PBmS/g) / (ΩТ * cos(LAL)), где g является локальной силой тяжести, и PBmS является средним изменением систематической погрешности акселерометров в направлении Юга.
Способ содержит этап вычисления отклонения или разности ΔС между первым значением курса и вторым значением курса с использованием обоих инерциальных данных, измеренных за один и тот же период. Отклонение двух вычисленных курсов содержит погрешность, составляющую ([PBmS/g - RmE] / (ΩТ * cos(LAL)), то есть это отклонение не зависит от уходов гирометров.
Способ предусматривает выбор в качестве курса первого значения курса или второго значения курса с учетом отклонения между этими двумя значениями.
В предпочтительном варианте выполнения способ содержит этап оценки когерентности вычисляемого отклонения с гипотезой отсутствия движения инерциального счетчика координат относительно земли и:
- если отклонение является когерентным, в качестве курса в направлении Севера выбирают первое значение курса,
- если отклонение является некогерентным, в качестве курса в направлении Севера выбирают второе значение курса.
Оценка когерентности содержит этап сравнения отклонения, взвешенного по косинусу широты и по модулю скорости вращения земли, с пороговым значением S.
В частности, проверяют следующее отношение:

где S = ((типовое отклонение (PBmS/g))2 + (типовое отклонение DmE)2)1/2.
Если отношение (1) проверяется, то в качестве курса в направлении Севера выбирают первое значение CCN. Если отношение (1) не проверяется, в качестве курса в направлении Севера выбирают второе значение курса СGC.
Способ в соответствии с настоящим изобретением содержит этап обнаружения движения инерциального счетчика координат при помощи детектора, внешнего по отношению к инерциальному счетчику координат, и выбора второго значения курса СGC в качестве курса в направлении Севера.
В варианте вычисление курса содержит следующие этапы:
- осуществляют весовую обработку первого значения курса CCN и второго значения курса СGC,
- осуществляют сложение взвешенных таким образом первого значения курса и второго значения курса для получения курса в направлении Севера, при этом формулу вычисления взвешивания в зависимости от вычисленного отклонения ΔС или ΔC*(ΩT*cos(LAL)) определяют таким образом, чтобы свести к минимуму типовое отклонение на погрешности полученного курса.
В этом случае курс в направлении Севера (или в данном варианте взвешенный курс) равен:
λС*СGC+(1-λC)+CCN, где весовой коэффициент λС является таким, что 0≤λС≤1, и λС является функцией вычисленного отклонения ΔС * (ΩТ * cos(LAL)).
Вычисленный таким образом курс является чувствительным к уходам гирометров идентично двум другим указанным выше значениям вычисленного курса.
Погрешность ЕrrСр(λС) взвешенного курса является такой, что
ЕrrСр(λС)*(ΩТ * cos(LAL))=DmE+λC*PBmS/g+(1-λC)*RmE,
где RmE=PBmS/g-ΔС * (ΩТ * cos(LAL)).
Чтобы определить, каким образом весовой коэффициент λС может зависеть от данной ΔС*(ΩТ * cos(LAL)) или от ΔС, можно применить несколько критериев. Например, выбирают правило изменения весового коэффициента λС в зависимости от X=ΔC(ΩT*cos(LAL)), который при данной широте и при типовом отклонении средних возможных скоростей вращения «RmE», не приводящих к обнаружению движения, сводит к минимуму типовое отклонение (рассматриваемое с точки зрения статистики, а не в плане времени) погрешности взвешенного курса ЕrrСр(λC)*(ΩТ*cos(LAL)).
Разумеется, изобретение не ограничивается описанным вариантом выполнения и охватывает любой вариант, не выходящий за рамки изобретения, определенные формулой изобретения.
Конструкция инерциального счетчика координат может отличаться от описанной выше.
Число измерений, осуществляемых для вычисления значений курса, может быть больше одного.
Таким образом, инерциальный счетчик текущих координат можно установить на элементе, регулируемом по угловому положению вокруг оси, по существу перпендикулярной к земле, и осуществлять вычисление курса для трех разных угловых положений, что, при усреднении трех вычисленных значений, позволяет исключить влияние ухода гирометров на погрешность курса (при этом уход имеет синусоидальную форму).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ИНЕРЦИАЛЬНОГО БЛОКА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2009 |
|
RU2483281C2 |
| АЭРОНАВИГАЦИОННОЕ УСТРОЙСТВО С ИНЕРЦИОННЫМИ ДАТЧИКАМИ И РАДИОНАВИГАЦИОННЫМИ ПРИЕМНИКАМИ И СПОСОБ АЭРОНАВИГАЦИИ, ИСПОЛЬЗУЮЩИЙ ТАКИЕ ЭЛЕМЕНТЫ | 2007 |
|
RU2434248C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499225C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
Настоящий способ относится к способам поиска курса в направлении географического Севера. Техническим результатом является создание способа, позволяющего оптимизировать поиск Севера при помощи инерциального датчика-модуля. Способ определения курса в направлении географического Севера при помощи инерциального датчика-модуля, содержащего три оси гирометрического измерения и три оси акселерометрического измерения, содержит следующие этапы: используют данные инерциального датчика-модуля в режиме определителя Севера для получения первого значения курса, используют данные инерциального датчика-модуля в режиме гирокомпаса для получения второго значения курса, определяют курс в направлении Севера, используя первое значение курса и второе значение курса, а также вычисляют отклонение между первым значением курса и вторым значением курса, в качестве курса в направлении Севера берут первое значение курса и/или второе значение курса с учетом вычисленного отклонения, при этом осуществляют оценку соответствия вычисляемого отклонения с гипотезой отсутствия движения инерциального счетчика координат относительно земли. Кроме того, в случае, если отклонение является соответствующим, в качестве курса в направлении Севера выбирают первое значение курса, если же отклонение является не соответствующим, то в качестве курса в направлении Севера выбирают второе значение курса. 4 з.п. ф-лы, 1 ил.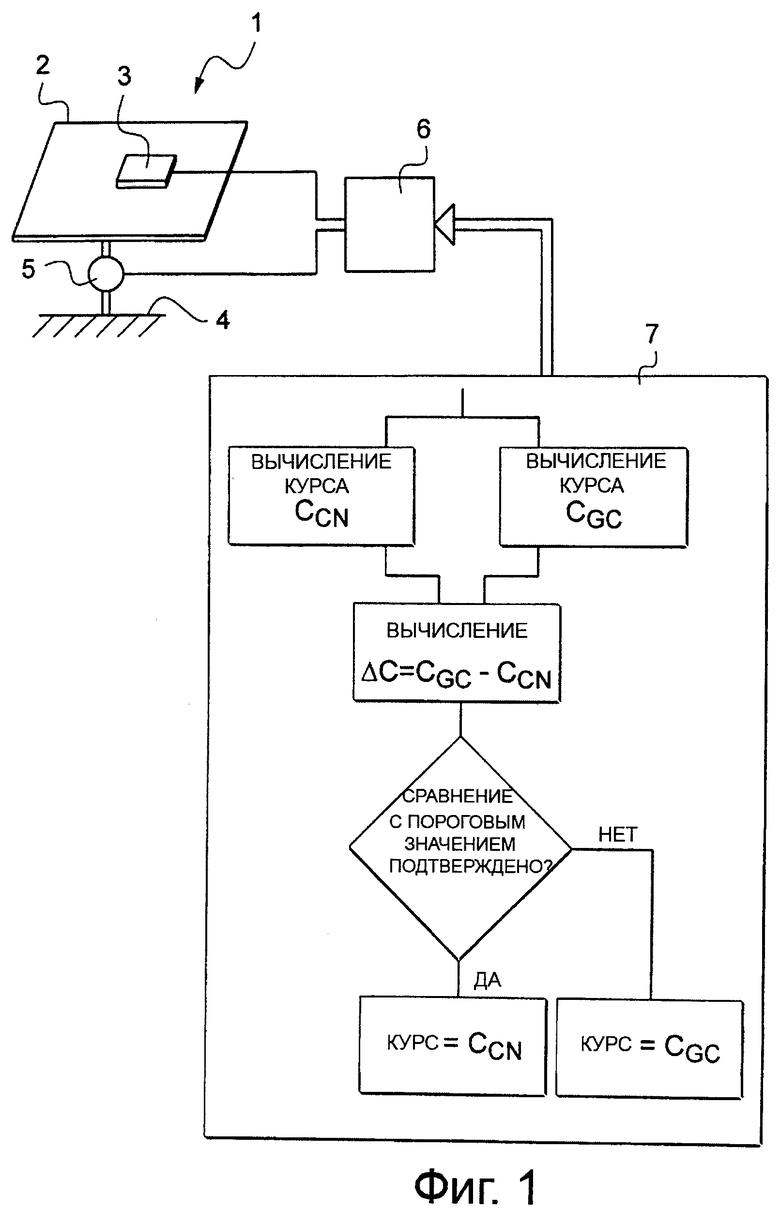
1. Способ определения курса в направлении географического Севера при помощи инерциального датчика-модуля, содержащего три оси гирометрического измерения и три оси акселерометрического измерения, содержащий следующие этапы:
- используют данные инерциального датчика-модуля в режиме определителя Севера для получения первого значения курса,
- используют данные инерциального датчика-модуля в режиме гирокомпаса для получения второго значения курса,
- определяют курс в направлении Севера, используя первое значение курса и второе значение курса, в котором вычисление курса содержит следующие этапы:
- вычисляют отклонение между первым значением курса и вторым значением курса,
- в качестве курса в направлении Севера берут первое значение курса или второе значение курса с учетом вычисленного отклонения, при этом осуществляют оценку соответствия вычисляемого отклонения с гипотезой отсутствия движения инерциального счетчика координат относительно земли, и,
- если отклонение является соответствующим, в качестве курса в направлении Севера выбирают первое значение курса,
- если отклонение является несоответствующим, в качестве курса в направлении Севера выбирают второе значение курса.
2. Способ по п.1, в котором оценка когерентности содержит этап сравнения отклонения, взвешенного по косинусу широты, по меньшей мере, с одним пороговым значением.
3. Способ по п.2, в котором пороговое значение равно квадратному корню из суммы квадрата типового отклонения составляющей среднего ухода Востока гирометров в течение времени измерения и квадрата типового отклонения среднего изменения систематической ошибки акселерометров в направлении Юга в течение времени измерения.
4. Способ по п.1, в котором вычисление курса содержит следующие этапы:
- осуществляют весовую обработку первого значения курса и второго значения курса,
- осуществляют сложение взвешенных таким образом первого значения курса и второго значения курса для получения курса в направлении Севера, при этом весовую обработку определяют таким образом, чтобы свести к минимуму типовое отклонение погрешности курса в направлении Севера.
5. Способ по п.1, содержащий этап обнаружения движения инерциального датчика-модуля при помощи детектора, внешнего по отношению к инерциальному датчику-модулю, и выбора второго значения курса в качестве курса в направлении Севера.
| КОРРЕКТИРУЕМАЯ СИСТЕМА ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И СТАБИЛИЗАЦИИ | 2006 |
|
RU2319930C2 |
| RU 22277696 С2, 10.06.2006 | |||
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 1992 |
|
RU2049931C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

