Изобретение относится к радионавигации и может быть использовано для определения координат, скорости и углов пространственной ориентации подвижного объекта в режиме реального времени или в режиме постобработки ретранслированных с борта объекта сигналов глобальных навигационных спутниковых систем. Изобретение может быть использовано для определения траекторий динамичных объектов в системах внешнетраекторных измерений.
Известна система определения параметров движения (координат и скорости) объекта по ретранслированным сигналам глобальных навигационных спутниковых систем [1], содержащая широкополосный аналоговый ретранслятор сигналов навигационных космических аппаратов (НКА) глобальной навигационной спутниковой системы (ГНСС) и базовую станцию, содержащую приемник ретранслированных сигналов НКА и пилот-сигнала, демодулятор пилот-сигнала, блок обработки ретранслированных сигналов НКА, приемник прямых сигналов НКА, блок обработки прямых сигналов НКА и персональную ЭВМ. Система предназначена для определения траекторий динамичных объектов в системах внешнетраекторных измерений. Недостатком этой системы является невозможность определения углов пространственной ориентации динамичного объекта.
Наиболее близким техническим решением к данному изобретению, выбранным в качестве прототипа, является система определения параметров движения объекта, а именно координат и скорости, по ретранслированным сигналам глобальных навигационных спутниковых систем [2]. Система состоит из размещаемого на борту подвижного объекта ретранслятора сигналов, принятых от НКА, включающего антенну, приемник сигналов НКА, преобразователь частоты, входы которого соединены с выходами приемника сигналов НКА, генератора опорного сигнала, формирователя пилот сигнала, а выход подсоединен к входу передатчика, соединенного с передающей антенной.
Система предназначена для определения траекторий динамичных объектов в системах внешнетраекторных измерений по результатам когерентной обработки переизлученных сигналов, т.е. с учетом измерения параметров по фазе несущей этих сигналов. Система потенциально позволяет определять составляющие вектора скорости с достаточно высокой точностью (среднеквадратическое отклонение (СКО) менее 50 см/с). Недостатком этой системы является невозможность определения пространственной ориентации объекта по ретранслированным сигналам, что обусловлено определением навигационных параметров объекта относительно только одной точки объекта - места установки приемной антенны спутниковых сигналов.
Технической задачей данного изобретения является расширение функциональных возможностей устройства за счет создания системы для определения координат, скорости и углов пространственной ориентации подвижного объекта по ретранслированным сигналам глобальных навигационных спутниковых систем, которая решается путем введения в систему дополнительных антенн и блока мультиплексирования в составе ретранслятора, дающая возможность по измерениям разности фаз ретранслированных сигналов от основной и дополнительных антенн вычислять пространственную ориентацию объекта.
Разделение сигналов от основной и дополнительных антенн может быть реализовано различными вариантами: с помощью кодового или частотного, или временного разделения сигналов.
В случае кодового разделения поставленная задача достигается тем, что в устройстве для определения параметров движения объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, согласно изобретению, в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1, и блок мультиплексирования для кодового разделения сигналов, первый вход которого соединен с первой антенной а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА.
При этом блок мультиплексирования сигналов содержит N модуляторов, первый дополнительный сумматор сигналов и формирователь кодов, вход которого является входом опорного сигнала блока мультиплексирования сигналов, а его N выходов -подсоединены соответственно к управляющим входам модуляторов и к N входам первого сумматора сигналов, N дополнительных входов блока мультиплексирования сигналов соединены соответственно с входами модуляторов, выходы модуляторов и первый вход блока мультиплексирования сигналов подсоединены соответственно к N+1 дополнительным входам первого дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, а вход пилот-сигнала первого дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов.
В случае использования частотного метода разделения сигналов устройство для определения параметров движения объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, согласно изобретению, в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1, и блок мультиплексирования содержащий N+1 смесителей, второй сумматор сигналов и синтезатор частот, при этом первые входы N+1 смесителей являются входами блока мультиплексирования сигналов, вторые входы -подсоединены соответственно к выходам синтезатора частот, а выходы N+1 смесителей соединены соответственно с входами второго сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, вход пилот-сигнала второго сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов, а вход синтезатора частот является входом опорного сигнала блока мультиплексирования сигналов, первый вход которого соединен с первой антенной, а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА. блок мультиплексирования сигналов содержит N+1 смесителей, второй дополнительный сумматор сигналов и синтезатор частот, при этом первые входы N+1 смесителей соединены соответственно с входами блока мультиплексирования сигналов, вторые входы подсоединены соответственно к выходам синтезатора частот, а выходы N+1 смесителей соединены соответственно с входами второго дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, вход пилот-сигнала второго дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов, а вход синтезатора частот является входом опорного сигнала блока мультиплексирования сигналов.
В случае использования временного метода разделения сигналов устройство для определения параметров движения объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, согласно изобретению, в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1, и блок мультиплексирования, содержащий последовательно соединенные коммутатор сигналов и сумматор сигналов, входы коммутатора сигналов являются соответственно первым и N дополнительными входами блока мультиплексирования сигналов, а его вход управления является входом опорного сигнала блока мультиплексирования сигналов, второй вход сумматора сигналов является входом сигнала формирователя пилот-сигнала, а его выход - выходом блока мультиплексирования сигналов, первый вход которого соединен с первой антенной, а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА.
Изобретение поясняется чертежами.
На фиг.1 приведена структурная схема устройства при кодовом способе разделения сигналов ретранслятора; на фиг.2 - структурная схема устройства при частотном способе разделения сигналов ретранслятора; на фиг.3 - структурная схема устройства при временном способе разделения сигналов ретранслятора на фиг.4 - структурная схема блока преобразования по частоте и усиления сигналов.
Устройство для определения координат и скорости подвижного объекта при кодовом способе разделения сигналов ретранслятора (фиг.1) состоит из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну 1 и N дополнительных антенн 2-1, 2-2,…, 2-N для приема сигналов навигационных космических аппаратов (НКА) 3, где N≥1, блок 4 мультиплексирования сигналов, содержащий N модуляторов 5-1, 5-2,…, 5-N, первый сумматор 6 сигналов и формирователь кодов 7, формирователь 8 пилот-сигнала, при этом вход формирователя кодов 7 является входом опорного сигнала блока 4 мультиплексирования, а его N выходов - подсоединены соответственно к управляющим входам модуляторов 5 и к N входам первого сумматора 6 сигналов, N дополнительных входов блока 4 мультиплексирования соединены соответственно с входами модуляторов 5, выходы модуляторов 5 и первый вход блока 4 мультиплексирования подсоединены соответственно к N+1 дополнительным входам первого сумматора 6 сигналов, выход которого является выходом блока 4 мультиплексирования, а первый вход первого сумматора 6 является входом сигнала формирователя 8 пилот-сигнала блока 4 мультиплексирования, формирователь 8 пилот-сигнала, блок 9 преобразования по частоте и усиления сигналов, подключенный к передающей антенне 10 для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор 11, соединенный со входами опорных сигналов блока 9 преобразования по частоте и усиления сигналов и формирователя 8 пилот-сигнала, наземный измеритель содержит антенну 12 для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку 13, антенну 14 для приема прямых сигналов НКА, подключенную к входу второго приемного блока 15, и блок 16 обработки сигналов, причем выходы первого и второго приемных блоков 13, 15 соединены соответственно с первым и вторым входами блока 16 обработки сигналов, первый вход блока 4 мультиплексирования сигналов соединен с первой антенной 1, а N дополнительных входов - соответственно с выходами дополнительных антенн 2, вход опорного сигнала блока 4 мультиплексирования сигналов соединен с выходом опорного генератора 11, а его выход подключен к входу блока 9 преобразования по частоте и усиления сигналов. Блок 16 обработки сигналов наземного измерителя (фиг.1) содержит блок 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока 16 обработки сигналов, блок 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА, вход которого является вторым входом блока 16 обработки сигналов, и вычислитель 20 координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выход блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА и блока 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА подсоединены соответственно к входам вычислителя 20 координат, скорости и углов пространственной ориентации подвижного объекта. N дополнительных выходов блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала подсоединены соответственно к N дополнительным входам блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА.
Устройство для определения координат и скорости подвижного объекта при частотном способе разделения сигналов ретранслятора (фиг.2) состоит из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну 1 и N дополнительных антенн 2-1, 2-2,…, 2-N для приема сигналов навигационных космических аппаратов (НКА) 3, где N≥1, блок 4 мультиплексирования сигналов, содержащий N+1 смесителей 21-1, 21-2,…, 21-N+1, второй сумматор 22 сигналов и синтезатор 23 частот, при этом первые входы N+1 смесителей 21 соединены соответственно с входами блока 4 мультиплексирования сигналов, вторые входы - подсоединены соответственно к выходам синтезатора 23 частот, а выходы N+1 смесителей 21 соединены соответственно с входами второго сумматора 22 сигналов, выход которого является выходом блока 4 мультиплексирования сигналов, вход пилот-сигнала второго сумматора 22 является входом сигнала формирователя 8 пилот-сигнала блока 4 мультиплексирования, а вход синтезатора 23 частот является входом опорного сигнала блока 4 мультиплексирования, формирователь 8 пилот-сигнала, блок 9 преобразования по частоте и усиления сигналов, подключенный к передающей антенне 10 для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор 11, соединенный со входами опорных сигналов блока 9 преобразования по частоте и усиления сигналов и формирователя 8 пилот-сигнала, наземный измеритель содержит антенну 12 для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку 13, антенну 14 для приема прямых сигналов НКА, подключенную к входу второго приемного блока 15, и блок 16 обработки сигналов, причем выходы первого и второго приемных блоков 13, 15 соединены соответственно с первым и вторым входами блока 16 обработки сигналов, первый вход блока 4 мультиплексирования сигналов соединен с первой антенной 1, а N дополнительных входов - соответственно с выходами дополнительных антенн 2, вход опорного сигнала блока 4 мультиплексирования сигналов соединен с выходом опорного генератора 11, а его выход подключен к входу блока 9 преобразования по частоте и усиления сигналов. Блок 16 обработки сигналов наземного измерителя (фиг.2) содержит блок 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока 16 обработки сигналов, блок 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА, вход которого является вторым входом блока 16 обработки сигналов, и вычислитель 20 координат, скорости и углов пространственной ориентации подвижного объекта, при этом выход блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выход блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА и блока 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА подсоединены соответственно к входам вычислителя 20 координат, скорости и углов пространственной ориентации подвижного объекта. Выход блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала подсоединен также к дополнительному входу блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА.
Устройство для определения координат и скорости подвижного объекта при временном способе разделения сигналов ретранслятора (фиг.3) состоит из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну 1 и N дополнительных антенн 2-1, 2-2,…, 2-N для приема сигналов навигационных космических аппаратов (НКА) 3, где N≥1, блок 4 мультиплексирования сигналов, содержащий коммутатор 24 сигналов и третий сумматор 25 сигналов, входы коммутатора 24 сигналов соединены соответственно с входами блока 4 мультиплексирования сигналов, вход управления коммутатора 24 сигналов является входом опорного сигнала блока 4 мультиплексирования, второй вход третьего сумматор 25 является входом сигнала формирователя пилот-сигнала, а его выход - выходом блока 4 мультиплексирования сигналов, формирователь 8 пилот-сигнала, блок 9 преобразования по частоте и усиления сигналов, подключенный к передающей антенне 10 для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор 11, соединенный со входами опорных сигналов блока 9 преобразования по частоте и усиления сигналов и формирователя 8 пилот-сигнала, наземный измеритель содержит антенну 14 для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку 13, антенну 14 для приема прямых сигналов НКА, подключенную к входу второго приемного блока 15, и блок 16 обработки сигналов, причем выходы первого и второго приемных блоков 13, 15 соединены соответственно с первым и вторым входами блока 16 обработки сигналов, первый вход блока 4 мультиплексирования сигналов соединен с первой антенной 1, а N дополнительных входов - соответственно с выходами дополнительных антенн 2, вход опорного сигнала блока 4 мультиплексирования сигналов соединен с выходом опорного генератора 11, а его выход подключен к входу блока 9 преобразования по частоте и усиления сигналов. Блок 16 обработки сигналов наземного измерителя (фиг.3) содержит блок 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока 16 обработки сигналов, блок формирования тактовых синхроимпульсов 26 блок 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА, вход которого является вторым входом блока 16 обработки сигналов, и вычислитель 20 координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выход блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА и блока 19 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы прямых сигналов НКА подсоединены соответственно к входам вычислителя 20 координат, скорости и углов пространственной ориентации подвижного объекта. Второй выход блока 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала подсоединен к входу блок формирования тактовых синхроимпульсов 26, выход которого подсоединен к дополнительному входу блока 18 оценки псевдозадержки, псевдодоплеровского сдвига частоты и псевдофазы ретранслированных сигналов НКА.
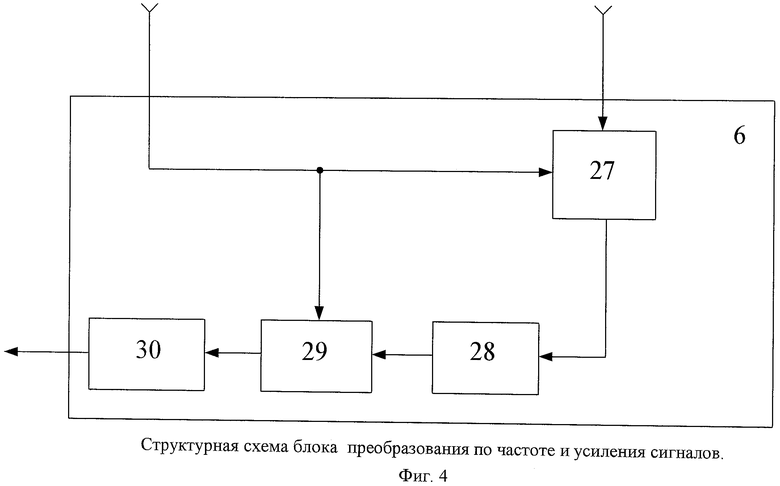
Блок 9 преобразования по частоте и усиления сигналов (фиг.4) выполнен в виде последовательно соединенных первого дополнительного смесителя 27, вход которого является входом блока 9 преобразования по частоте и усиления сигналов, первого фильтра 28 промежуточной частоты, второго дополнительного смесителя 29 и усилителя 30, выход которого является выходом блока 9 преобразования по частоте и усиления сигналов, при этом вход опорного сигнала блока 9 преобразования по частоте и усиления сигналов соединен с вторыми входами первого и второго дополнительных смесителей 27, 29.
Навигационные сигналы, принимаемые ретранслятором и наземным измерителем, излучаются созвездием НКА 3.
Для разделения сигналов общих НКА, принятых разными бортовыми антеннами ретранслятора, могут быть использованы известные методы разделения сигналов:
временное, частотное или кодовое разделение.
При кодовом способе разделения совокупность сигналов, принятых разными приемными антеннами 1, 2, подвергается дополнительной манипуляции по фазе кодовой последовательностью, индивидуальной для каждого приемного канала. Для упрощения последующей обработки сигналов в наземном измерителе (НИ) путем снятия дополнительной кодовой модуляции в аппаратуре ретранслятора могут дополнительно формироваться специальные пилот-сигналы. Для разделения этих сигналов может быть использована модуляция по фазе кодовыми последовательностями синхронно с сигналами НКА аналогичными. В аппаратуре наземного измерителя путем совместной обработки сигналов НКА 3 и пилот-сигнала (ПС) осуществляется снятие дополнительной кодовой модуляции. Далее путем обработки совокупности ретранслированных сигналов осуществляется измерение параметров траектории и углов пространственной ориентации объекта.
При частотном способе разделения сигналы общих НКА, принятые разными приемными антеннами ретранслятора, переносятся на разные литерные частоты с сохранением формы спектра сигналов.
При временном способе разделения сигналы общих НКА, принятых разными приемными антеннами 1, 2, поступают на тракт преобразования и усиления через переключатель (мультиплексор), который последовательно коммутирует сигналы НКА с разных антенн через фиксированный известный интервал времени порядка 10…50 мс. В аппаратуре ретранслятора при этом также формируется ПС в виде модулированного широкополосной кодовой последовательностью синусоидального сигнала. Коммутация сигналов НКА, принятых разными антеннами ретранслятора, синхронизирована с границами кодовой последовательности ПС.
Устройство работает следующим образом. Определение координат объекта осуществляется методом совместной обработки псевдодальномерных измерений по ретранслированным и прямым сигналам НКА. В блоке 18 оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА блока 16 обработки сигналов НИ осуществляется измерение псевдодальностей ретранслированных сигналов НКА, принятых антенной 12 и приемным блоком 13 переизлученных сигналов НКА и ПС. Пусть  - псевдодальность, измеренная по ретранслированному сигналу i-го НКА, принятого антенной 1 ретранслятора (Р), равная:
- псевдодальность, измеренная по ретранслированному сигналу i-го НКА, принятого антенной 1 ретранслятора (Р), равная:

где Rip - дальность между i-м НКА и Р; RpA - дальность между Р и НИ; τap - аппаратная задержка сигнала в Р; D'A - смещение шкалы времени НИ относительно системной шкалы времени, пересчитанное в единицы длины.
Также в блоке 15 оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА 3 осуществляется измерение псевдодальностей прямых сигналов НКА, принятых антенной 14 и приемным блоком 15 прямых сигналов НКА. Пусть также  - псевдодальность, измеренная по прямому сигналу i-го НКА равна:
- псевдодальность, измеренная по прямому сигналу i-го НКА равна:

где RiA - дальность между i-м НКА и НИ.
В блоке 18 оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА производятся псевдодальномерные измерения не менее чем по 4-м ретранслированным сигналам НКА, и в блоке 19 оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА производятся псевдодальномерные измерения по одному и более прямым сигналам НКА. В вычислителе 20 путем решения системы уравнений вида:

определяются координаты объекта, смещение шкалы времени НИ относительно системной шкалы времени и величина аппаратурной задержки в Р.
При решении системы (1) в вычислителе 20 координаты НИ полагаются известными. При неизвестных координатах НИ в блоке 19 первичной обработки прямых сигналов НКА необходимо производить псевдодальномерные измерения не менее чем по 4-м прямым сигналам НКА.
Определение компонент вектора скорости объекта можно осуществить методом совместной обработки псевдоскоростных (псевдодоплеровских) измерений по ретранслированным и прямым сигналам НКА и ПС. В блоке 18, где осуществляется первичная обработка ретранслированных сигналов НКА, осуществляется измерение радиальных псевдоскоростей ретранслированных сигналов НКА и ПС, принятых антенной 12 и приемным блоком 13. Пусть  - радиальная псевдоскорость, измеренная по ретранслированному сигналу i-го НКА, принятого антенной 1 ретранслятора, равная:
- радиальная псевдоскорость, измеренная по ретранслированному сигналу i-го НКА, принятого антенной 1 ретранслятора, равная:

где  - радиальная скорость между i-м НКА и Р;
- радиальная скорость между i-м НКА и Р;  - радиальная скорость между Р и НИ;
- радиальная скорость между Р и НИ;  - скорость ухода шкалы времени НИ относительно системной шкалы времени (производная по времени величины
- скорость ухода шкалы времени НИ относительно системной шкалы времени (производная по времени величины  ), пересчитанное в единицы скорости;
), пересчитанное в единицы скорости;  -смещение частоты опорного генератора (ОГ) 11 Р на несущей частоте ретрансляции, пересчитанное в единицы скорости; kff - коэффициент, равный отношению несущей частоты сигнала НКА к несущей частоте ретрансляции.
-смещение частоты опорного генератора (ОГ) 11 Р на несущей частоте ретрансляции, пересчитанное в единицы скорости; kff - коэффициент, равный отношению несущей частоты сигнала НКА к несущей частоте ретрансляции.
Пусть также  - радиальная псевдоскорость, измеренная по прямому сигналу i-го НКА, равная:
- радиальная псевдоскорость, измеренная по прямому сигналу i-го НКА, равная:
где  - радиальная скорость между i-м НКА и НИ.
- радиальная скорость между i-м НКА и НИ.
Пусть также  - радиальная псевдоскорость, измеренная по ПС, равная:
- радиальная псевдоскорость, измеренная по ПС, равная:
где  - радиальная скорость между Р и НИ.
- радиальная скорость между Р и НИ.
В блоке 18 осуществляются измерения радиальных псевдоскоростей не менее чем по трем ретранслированным сигналам НКА и ПС, и в блоке 19 производятся измерения радиальной псевдоскорости по одному и более прямым сигналам НКА. В вычислителе 20 путем решения системы уравнений вида:
определяются компоненты вектора скорости объекта, скорость ухода шкалы времени НИ относительно системной шкалы времени (производная по времени величины D'A) и отклонение частоты ОГ 11 Р. Использование псевдодоплеровских измерений по ПС позволяет снизить минимальное необходимое число наблюдаемых НКА до 3-х при определении скорости объекта.
Определение углов пространственной ориентации объекта можно осуществить с помощью обработки фазовых измерений по ретранслированным сигналам НКА. В блоке оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА 18 блока 16 обработки сигналов НИ осуществляется измерение псевдофаз ретранслированных сигналов НКА и ПС, принятых антенной 12 и приемным устройством 13 переизлученных сигналов НКА и ПС. Пусть  ,
,  - псевдофазы, измеренные по ретранслированному сигналу i-го НКА, принятого антенной 1 и N дополнительными антеннами 2-1, 2-2,…, 2-N ретранслятора, соответственно равные:
- псевдофазы, измеренные по ретранслированному сигналу i-го НКА, принятого антенной 1 и N дополнительными антеннами 2-1, 2-2,…, 2-N ретранслятора, соответственно равные:
 ;
;
 ;
;


где  ,
,  ,…,
,…,  - фазы сигналов i-го НКА, принятого антенной 1, и N - дополнительными антеннами 2-1, 2-2,…, 2-N ретранслятора соответственно;
- фазы сигналов i-го НКА, принятого антенной 1, и N - дополнительными антеннами 2-1, 2-2,…, 2-N ретранслятора соответственно;  - фаза ретранслированного сигнала i-го НКА, обусловленная распространением сигнала от передающей антенны Р 10 до приемной антенны 12 НИ, аппаратурной задержкой в Р, уходом шкалы времени Р и уходом шкалы времени НИ.
- фаза ретранслированного сигнала i-го НКА, обусловленная распространением сигнала от передающей антенны Р 10 до приемной антенны 12 НИ, аппаратурной задержкой в Р, уходом шкалы времени Р и уходом шкалы времени НИ.
Далее составляются разности измеренных по ретранслированному сигналу i-го НКА псевдофаз  :
:
 ;
;



В вычислителе 20 путем обработки разностей фаз вида (3), составленным не менее чем по двум НКА (при известных координатах ретранслятора) известными методами вычисляются углы пространственной ориентации.
Блок 17 оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок 18 оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блок 19 оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА могут быть реализованы по схемам, приведенным в [3]с использованием известной элементной базы. Блоки 1, 2, 4, 8, 9, 10, 11, 12, 13, 14, 15 и 20 могут быть реализованы с использованием известной аппаратуры и элементной базы и правил ее построения.
Источники информации
1. Когерентный ретранслятор для переизлучения сигналов НКА GPS с широкополосным пилот-сигналом: пат. США №5729235, C01S 1/00, опубл. 17.03.1998.
2. Михайлицкий В.П., Гребенников А.В., Мыкольников Я.В., Кушнир А.А., Павлов B.C. Аппаратура канала ретрансляции сигналов спутниковых радионавигационных систем для подвижных объектов. // Вестник МГТУ. Серия «Приборостроение». Специальный выпуск «Радиолокация, спутниковая навигация и связь, радиоастрономия», 2009, с.144-150 (прототип).
3. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Перова, В.Н.Харисова. - М.: Радиотехника, 2005, стр.414, 417, 420, 422, 423-425.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2021 |
|
RU2779079C1 |
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ ВЫСОКОТОЧНЫХ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПОТРЕБИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2577846C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2746148C1 |
Изобретение относится к радионавигации и может быть использовано для определения координат, скорости и углов пространственной ориентации подвижных объектов. Технический результат - расширение функциональных возможностей. Для достижения данного результата в систему введены дополнительные антенны в состав ретранслятора и блока мультиплексирования сигналов. При этом осуществляют измерения разности фаз ретранслированных сигналов от основной и дополнительных антенн и определяют пространственную ориентацию объекта. Разделение сигналов от основной и дополнительных антенн ретранслятора реализовано с помощью блока мультиплексирования, выполненного по трем различным схемам, позволяющим выделить фазы сигналов от основной и дополнительных антенн с помощью кодового, частотного или временного разделения сигналов. 3 н.п. ф-лы, 4 ил.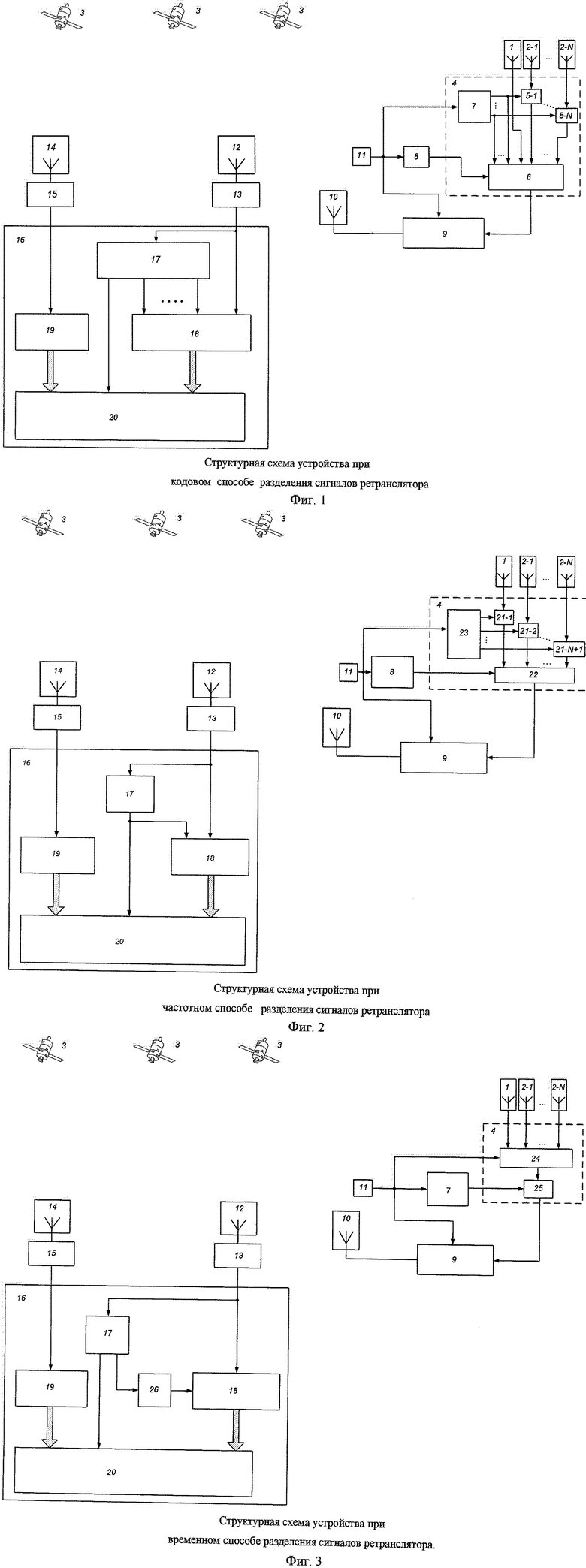
1. Устройство для определения координат и скорости подвижного объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, отличающееся тем, что в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1, и блок мультиплексирования для кодового разделения сигналов, содержащий N модуляторов, первый дополнительный сумматор сигналов и формирователь кодов, вход которого является входом опорного сигнала блока мультиплексирования сигналов, а его N выходов подсоединены соответственно к управляющим входам модуляторов и к N входам первого дополнительного сумматора сигналов, N дополнительных входов блока мультиплексирования сигналов соединены соответственно с входами модуляторов, выходы модуляторов и первый вход блока мультиплексирования сигналов подсоединены соответственно к N+1 дополнительным входам первого дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, а вход пилот-сигнала первого дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов, при этом первый вход блока мультиплексирования соединен с первой антенной, а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, при этом блок мультиплексирования сигналов содержит N модуляторов, первый дополнительный сумматор сигналов и формирователь кодов, вход которого является входом опорного сигнала блока мультиплексирования сигналов, а его N выходов подсоединены соответственно к управляющим входам модуляторов и к N входам первого сумматора сигналов, N дополнительных входов блока мультиплексирования сигналов соединены соответственно с входами модуляторов, выходы модуляторов и первый вход блока мультиплексирования сигналов подсоединены соответственно к N+1 дополнительным входам первого дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, а вход пилот-сигнала первого дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов.
2. Устройство для определения координат и скорости подвижного объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, отличающееся тем, что в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1 и блок мультиплексирования сигналов, содержащий N+1 смесителей, второй дополнительный сумматор сигналов и синтезатор частот, при этом первые входы N+1 смесителей соединены соответственно с входами блока мультиплексирования сигналов, вторые входы подсоединены соответственно к выходам синтезатора частот, а выходы N+1 смесителей соединены соответственно с входами второго дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, вход пилот-сигнала второго дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов, а вход синтезатора частот является входом опорного сигнала блока мультиплексирования сигналов, первый вход которого соединен с первой антенной, а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, блок мультиплексирования сигналов содержит N+1 смесителей, второй дополнительный сумматор сигналов и синтезатор частот, при этом первые входы N+1 смесителей соединены соответственно с входами блока мультиплексирования сигналов, вторые входы подсоединены соответственно к выходам синтезатора частот, а выходы N+1 смесителей соединены соответственно с входами второго дополнительного сумматора сигналов, выход которого является выходом блока мультиплексирования сигналов, вход пилот-сигнала второго дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала блока мультиплексирования сигналов, а вход синтезатора частот является входом опорного сигнала блока мультиплексирования сигналов.
3. Устройство для определения координат и скорости подвижного объекта, состоящее из ретранслятора, размещаемого на борту подвижного объекта, и наземного измерителя, при этом ретранслятор содержит первую антенну для приема сигналов навигационных космических аппаратов (НКА), формирователь пилот-сигнала, блок преобразования по частоте и усиления сигналов, подключенный к передающей антенне для ретрансляции преобразованных по частоте сигналов НКА и излучения пилот-сигнала, первый опорный генератор, соединенный со входами опорных сигналов блока преобразования по частоте и усиления сигналов и формирователя пилот-сигнала, наземный измеритель содержит антенну для приема ретранслированных сигналов НКА и пилот-сигнала, подключенную к первому приемному блоку, антенну для приема прямых сигналов НКА, подключенную к входу второго приемного блока, и блок обработки сигналов, причем выходы первого и второго приемных блоков соединены соответственно с первым и вторым входами блока обработки сигналов, отличающееся тем, что в ретранслятор введены N дополнительных антенн для приема сигналов НКА, где N≥1, и блок мультиплексирования сигналов, содержащий последовательно соединенные коммутатор сигналов и дополнительный сумматор сигналов, входы коммутатора сигналов являются соответственно первым и N дополнительными входами блока мультиплексирования сигналов, а его вход управления является входом опорного сигнала блока мультиплексирования сигналов, второй вход дополнительного сумматора сигналов является входом сигнала формирователя пилот-сигнала, а его выход - выходом блока мультиплексирования сигналов, первый вход которого соединен с первой антенной, а N дополнительных входов - соответственно с выходами дополнительных антенн для приема сигналов НКА, вход опорного сигнала блока мультиплексирования сигналов соединен с выходом опорного генератора, а его выход подключен к входу блока преобразования по частоте и усиления сигналов, блок обработки сигналов наземного измерителя содержит блок оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, блок оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА, входы которых объединены и являются первым входом блока обработки сигналов, а также блок оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА, вход которого является вторым входом блока обработки сигналов, и вычислитель координат, скорости и углов пространственной ориентации подвижного объекта, при этом первый выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала, выходы блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА и блока оценки псевдозадержки и псевдодоплеровского сдвига частоты прямых сигналов НКА подсоединены соответственно к входам вычислителя координат, скорости и углов пространственной ориентации подвижного объекта, а второй выход блока оценки псевдозадержки и псевдодоплеровского сдвига частоты пилот-сигнала соединен с вторым входом блока оценки псевдозадержки и псевдодоплеровского сдвига частоты ретранслированных сигналов НКА.
| МИХАЙЛИЦКИЙ В.П., ГРЕБЕННИКОВ А.В., МЫКОЛЬНИКОВ Я.В., КУШНИР А.А., ПАВЛОВ B.C | |||
| Аппаратура канала ретрансляции сигналов спутниковых радионавигационных систем для подвижных объектов | |||
| - Вестник МГТУ | |||
| Серия «Приборостроение» | |||
| Специальный выпуск «Радиолокация, спутниковая навигация и связь, радиоастрономия», 2009, с.144-150 | |||
| US |

